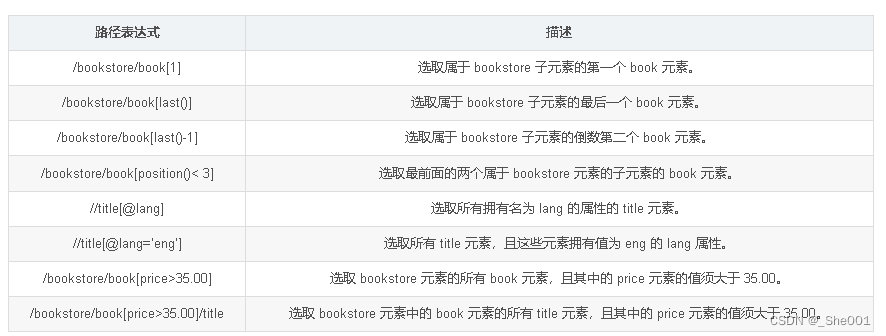
【嵌入式学习笔记】嵌入式入门6——定时器TIMER
1.定时器概述
1.1.软件定时原理
使用纯软件(CPU死等)的方式实现定时(延时)功能有诸多缺点,如CPU死等、延时不精准。
void delay_us(uint32_t us)
{us *= 72;while(us--);
}
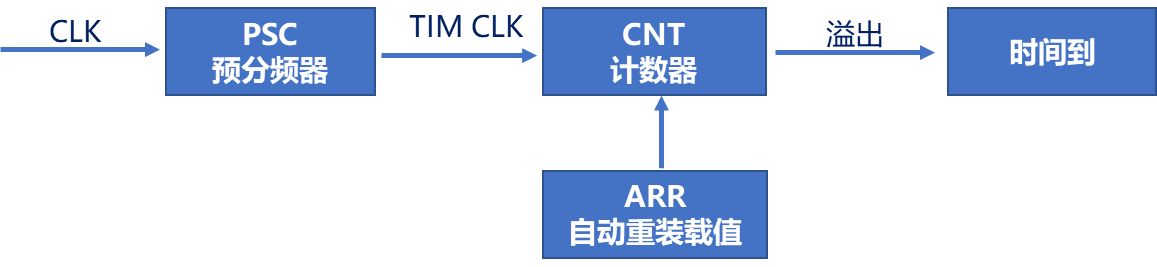
1.2.定时器定时原理
使用精准的时基,通过硬件的方式,实现定时功能定时器核心就是计数器
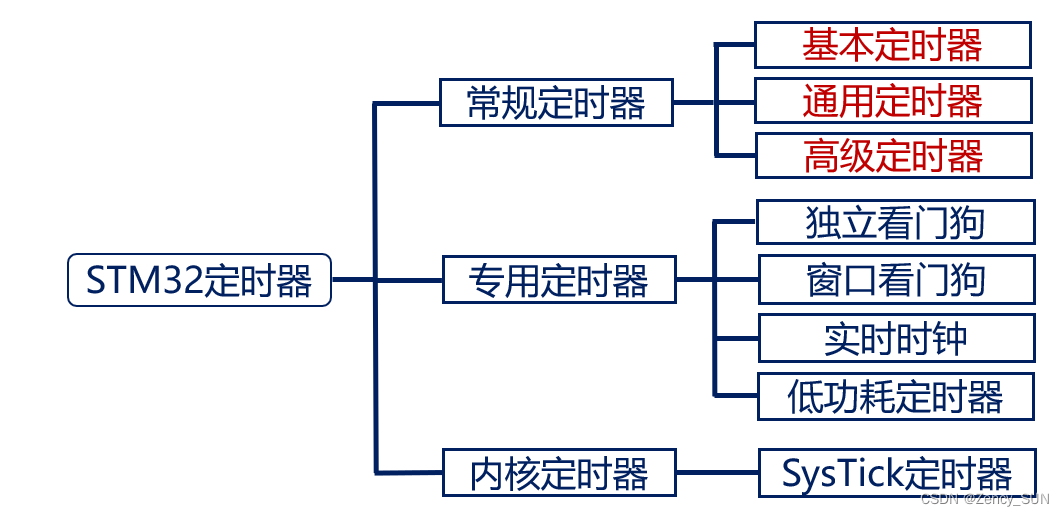
1.3.STM32定时器分类
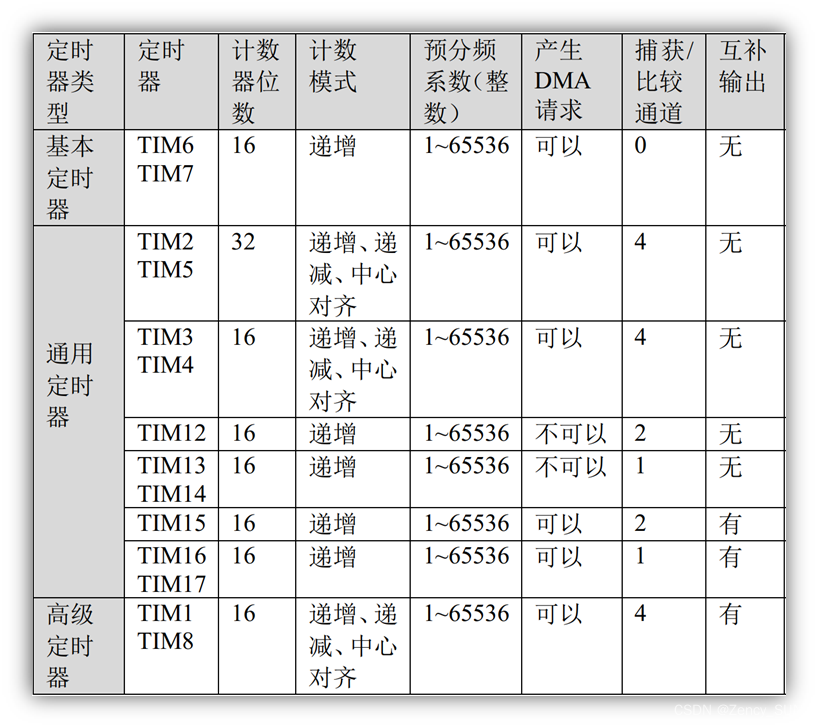
1.4.STM32定时器特性表
- F1系列

- H7系列
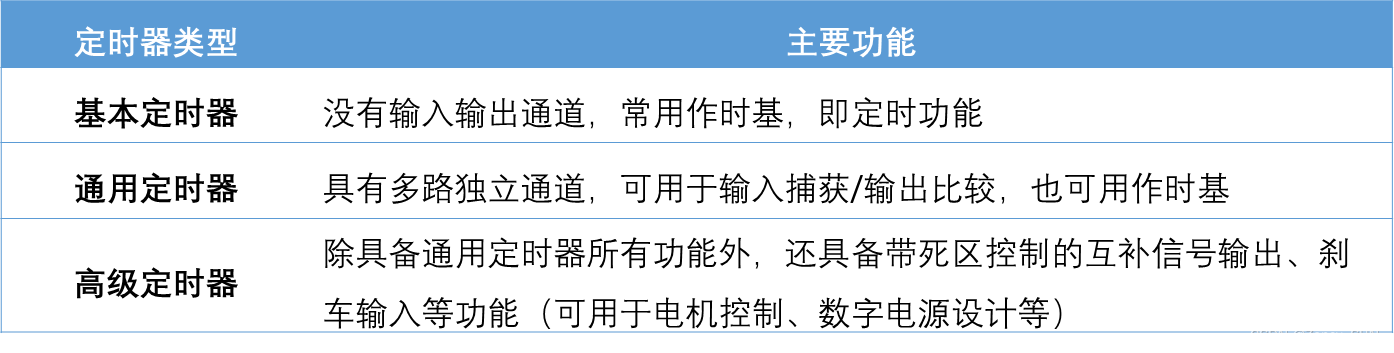
1.5.STM32基本、通用、高级定时器的功能整体区别
2.基本定时器(以F1为例)
2.1.基本定时器简介
- 基本定时器:TIM6/TIM7
- 主要特性:
16位递增计数器(计数值:0~65535)
16位预分频器(分频系数:1~65536)
可用于触发DAC
在更新事件(计数器溢出)时,会产生中断/DMA请求
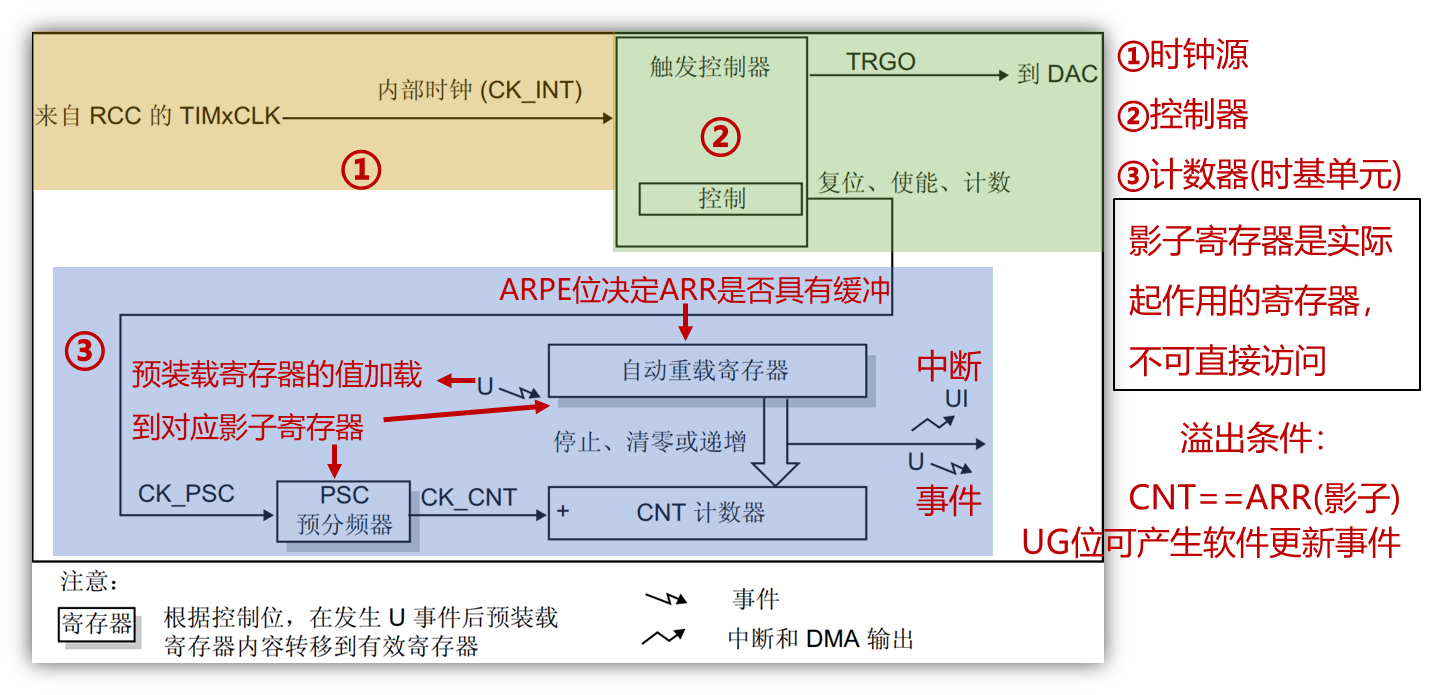
2.2.基本定时器框图
注意:事件默认产生,可以配置为不产生;中断默认不产生,可以配置为产生。
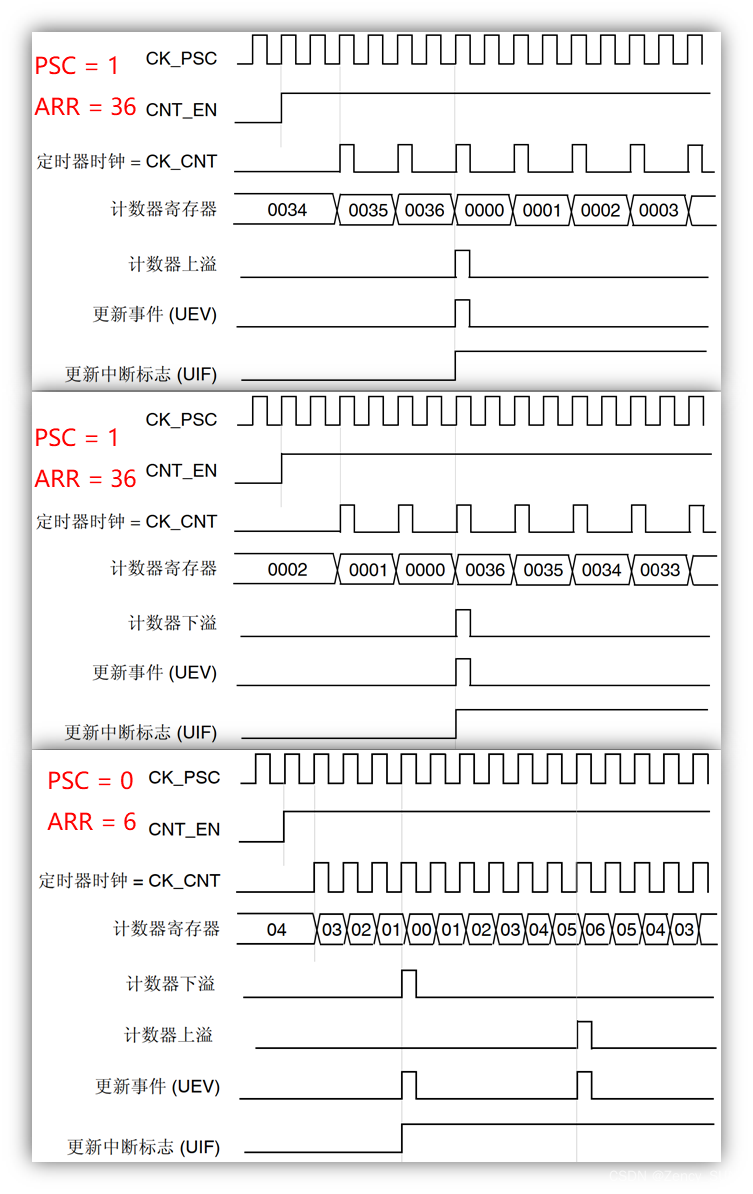
2.3.定时器计数模式及溢出条件
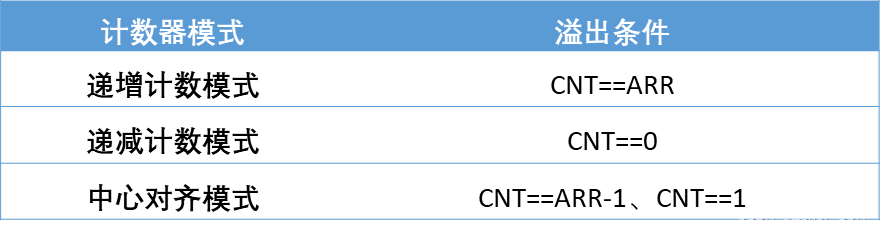
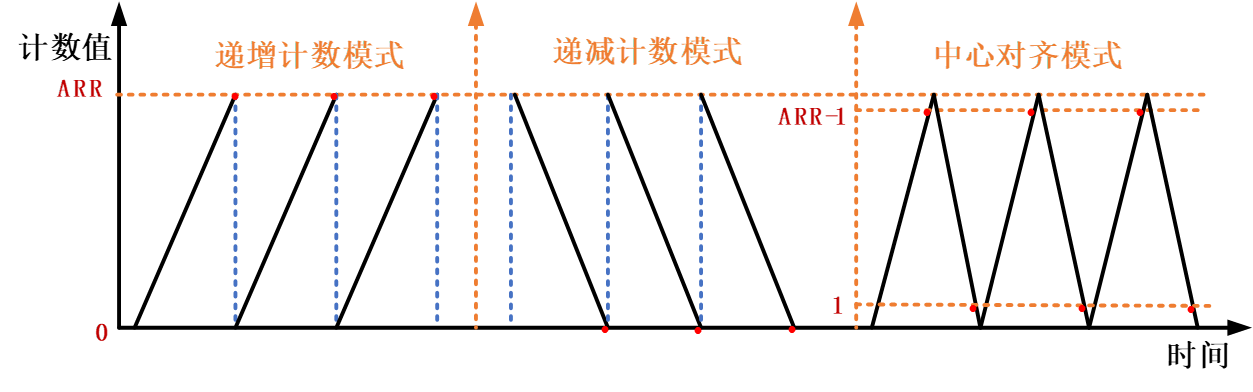
以下分别是递增、递减、中心对齐模式的实例说明
2.4.定时器中断实验相关寄存器
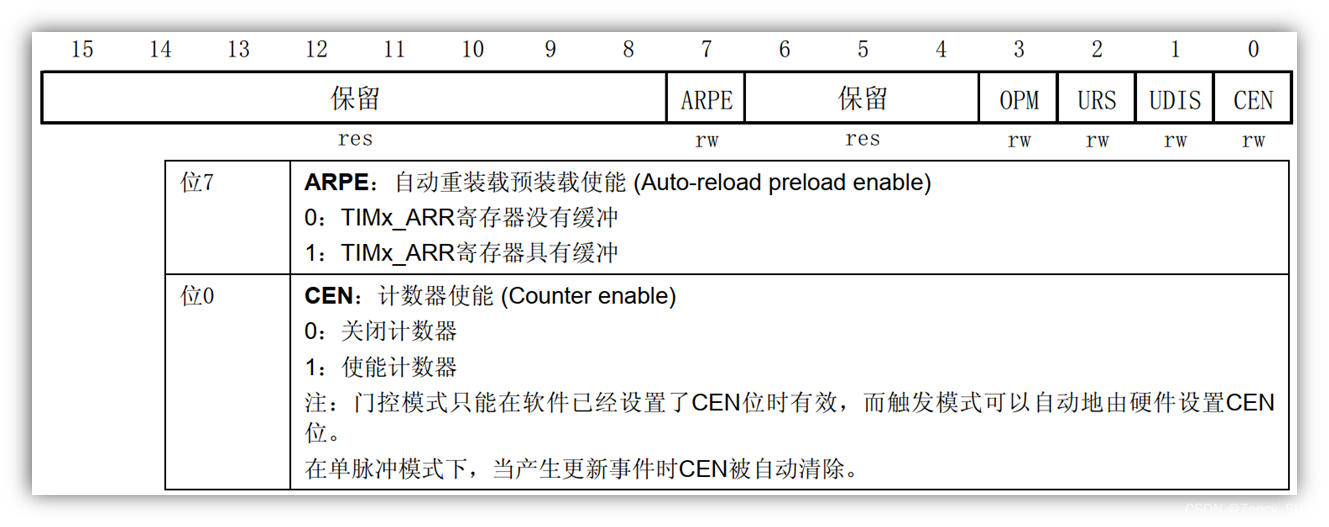
- TIM6 和TIM7 控制寄存器 1(TIMx_CR1)
用于设置ARR寄存器是否具有缓冲,使能/关闭计数器
有缓冲和没缓冲的区别
- 延时1s+延时2s:在无缓冲情况下,延时1s后要重新写ARR,这个过程消耗时间导致误差;有缓冲情况下,可以在1s延时内写ARR,不会立即生效,在1s延时结束后生效,没有误差。
- 延时1s+延时1s:不用写ARR,没有区别
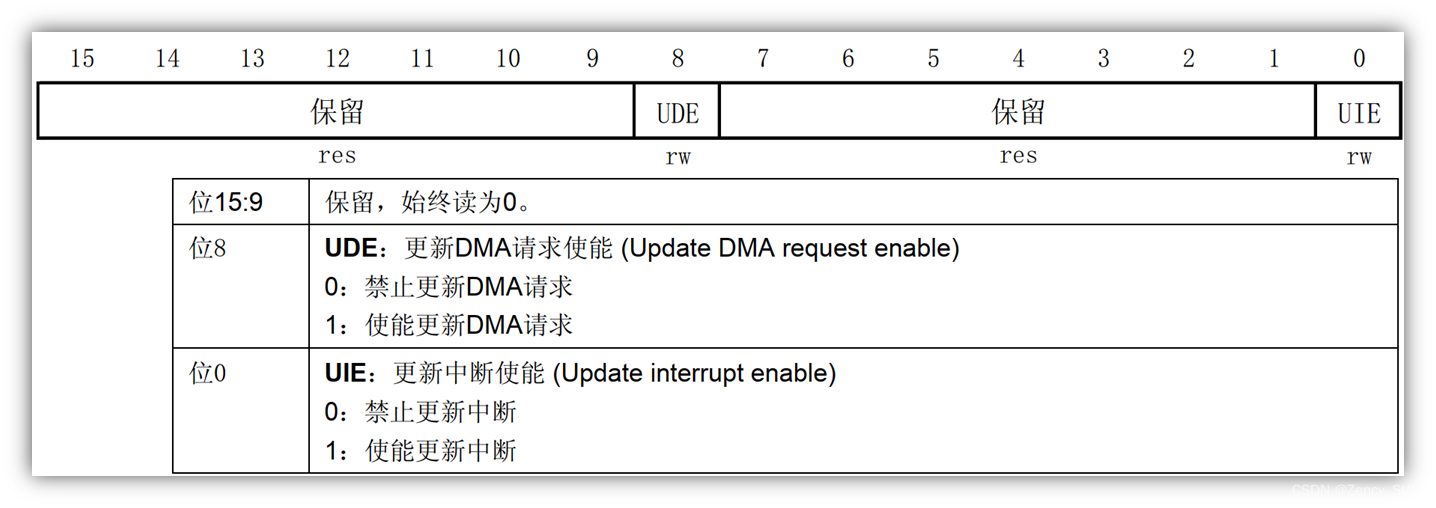
- TIM6 和TIM7 DMA/中断使能寄存器(TIMx_DIER)
用于使能更新中断
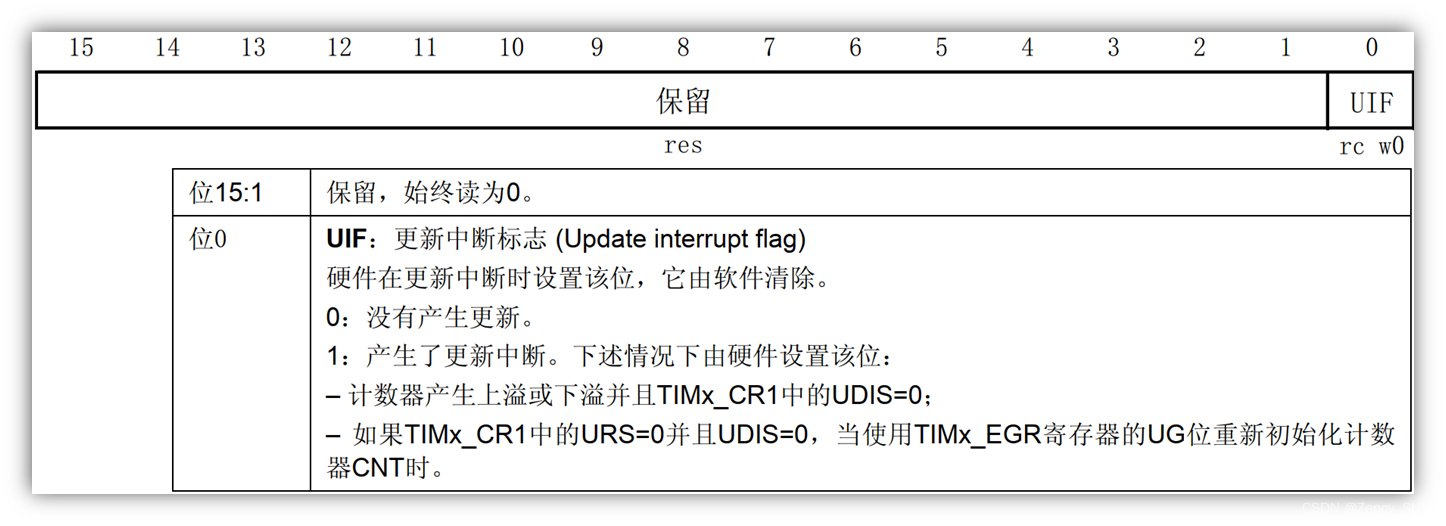
- TIM6 和TIM7 状态寄存器(TIMx_SR)
用于判断是否发生了更新中断,由硬件置1,软件清零
- TIM6 和TIM7 计数器(TIMx_CNT)
计数器实时数值,可用于设置计时器初始值,范围:0~65535

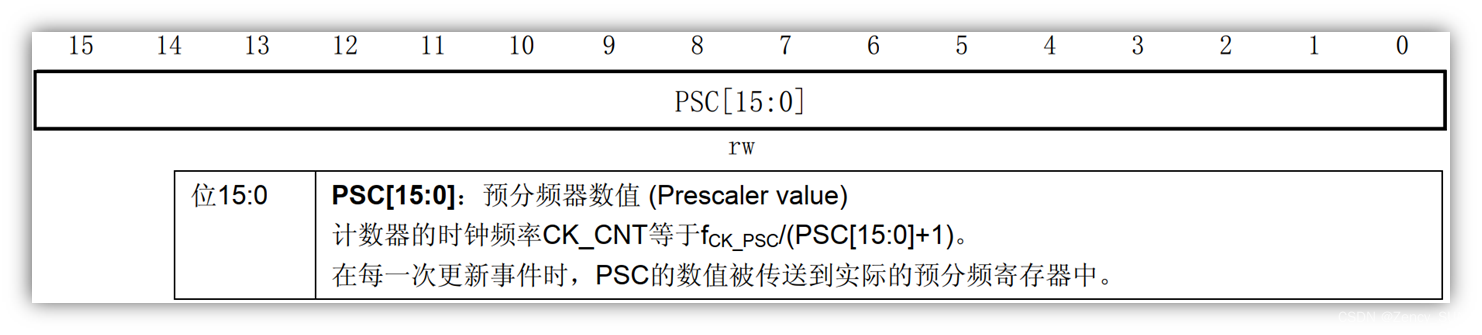
- TIM6 和TIM7 预分频器(TIMx_PSC)
用于设置预分频系数,范围:0~65535,实际预分频系数等于PSC+1
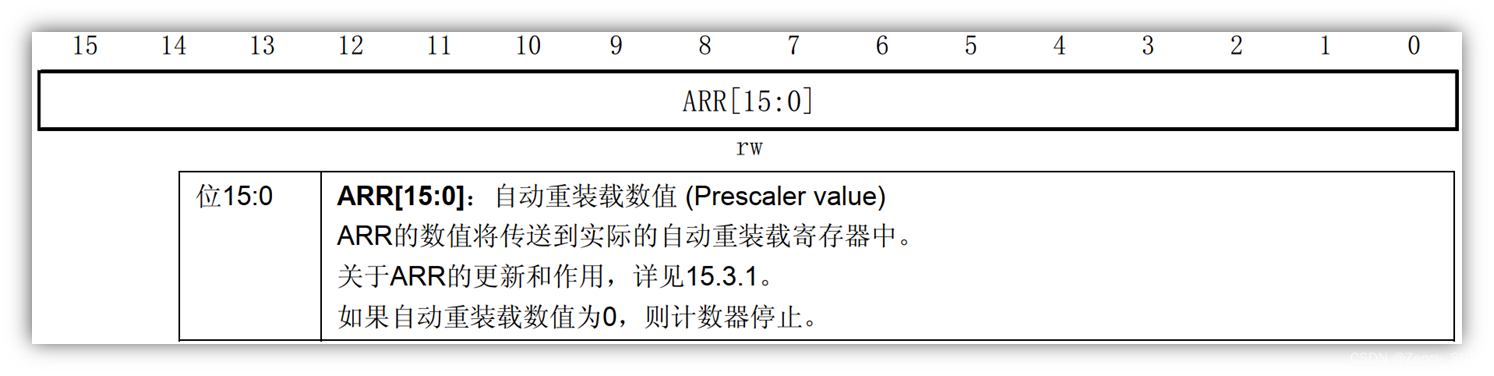
- TIM6 和TIM7 自动重装载寄存器(TIMx_ARR)
用于设置自动重装载值,范围:0~65535
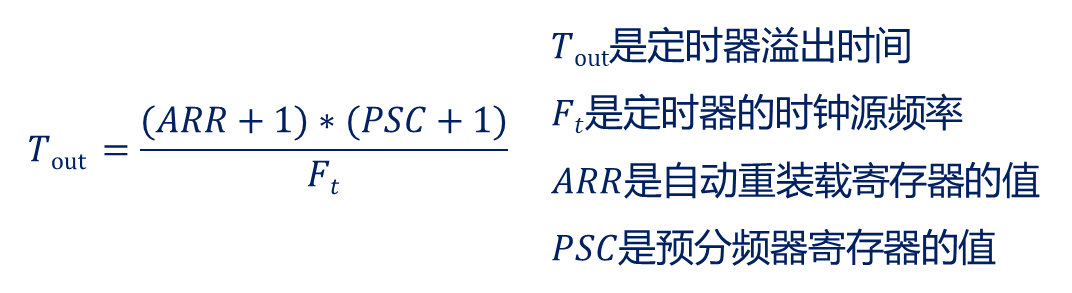
2.5.定时器溢出时间计算方法
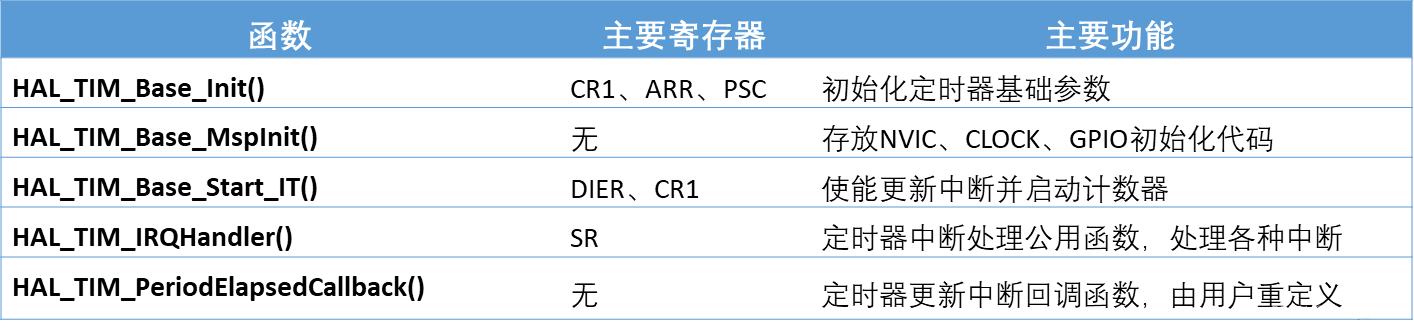
2.6.定时器中断实验配置步骤
- 配置定时器基础工作参数:HAL_TIM_Base_Init()
- 定时器基础MSP初始化:HAL_TIM_Base_MspInit() 配置NVIC、CLOCK等
- 使能更新中断并启动计数器:HAL_TIM_Base_Start_IT()
- 设置优先级,使能中断:HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()
- 编写中断服务函数:TIMx_IRQHandler()等 -> HAL_TIM_IRQHandler()
- 编写定时器更新中断回调函数:HAL_TIM_PeriodElapsedCallback()
关键结构体
typedef struct
{ TIM_TypeDef *Instance; /* 外设寄存器基地址 */ TIM_Base_InitTypeDef Init; /* 定时器初始化结构体*/...
}TIM_HandleTypeDef;
typedef struct
{ uint32_t Prescaler; /* 预分频系数 */ uint32_t CounterMode; /* 计数模式 */ uint32_t Period; /* 自动重载值 ARR */ uint32_t ClockDivision; /* 时钟分频因子 */ uint32_t RepetitionCounter; /* 重复计数器寄存器的值 */ uint32_t AutoReloadPreload; /* 自动重载预装载使能 */
} TIM_Base_InitTypeDef;
2.7.编程实战:定时器中断实验
- 使用定时器6,实现500ms定时器更新中断,在中断里翻转LED0
- PSC=7199,ARR=4999为例。
代码暂不贴出
3.通用定时器(以F1为例)
3.1.通用定时器简介
- 通用定时器:TIM2/TIM3 /TIM4 /TIM5
- 主要特性:
16位递增、递减、中心对齐计数器(计数值:0~65535)
16位预分频器(分频系数:1~65536)
可用于触发DAC、ADC
在更新事件、触发事件、输入捕获、输出比较时,会产生中断/DMA请求
4个独立通道,可用于:输入捕获、输出比较、输出PWM、单脉冲模式
使用外部信号控制定时器且可实现多个定时器互连的同步电路
支持编码器和霍尔传感器电路等
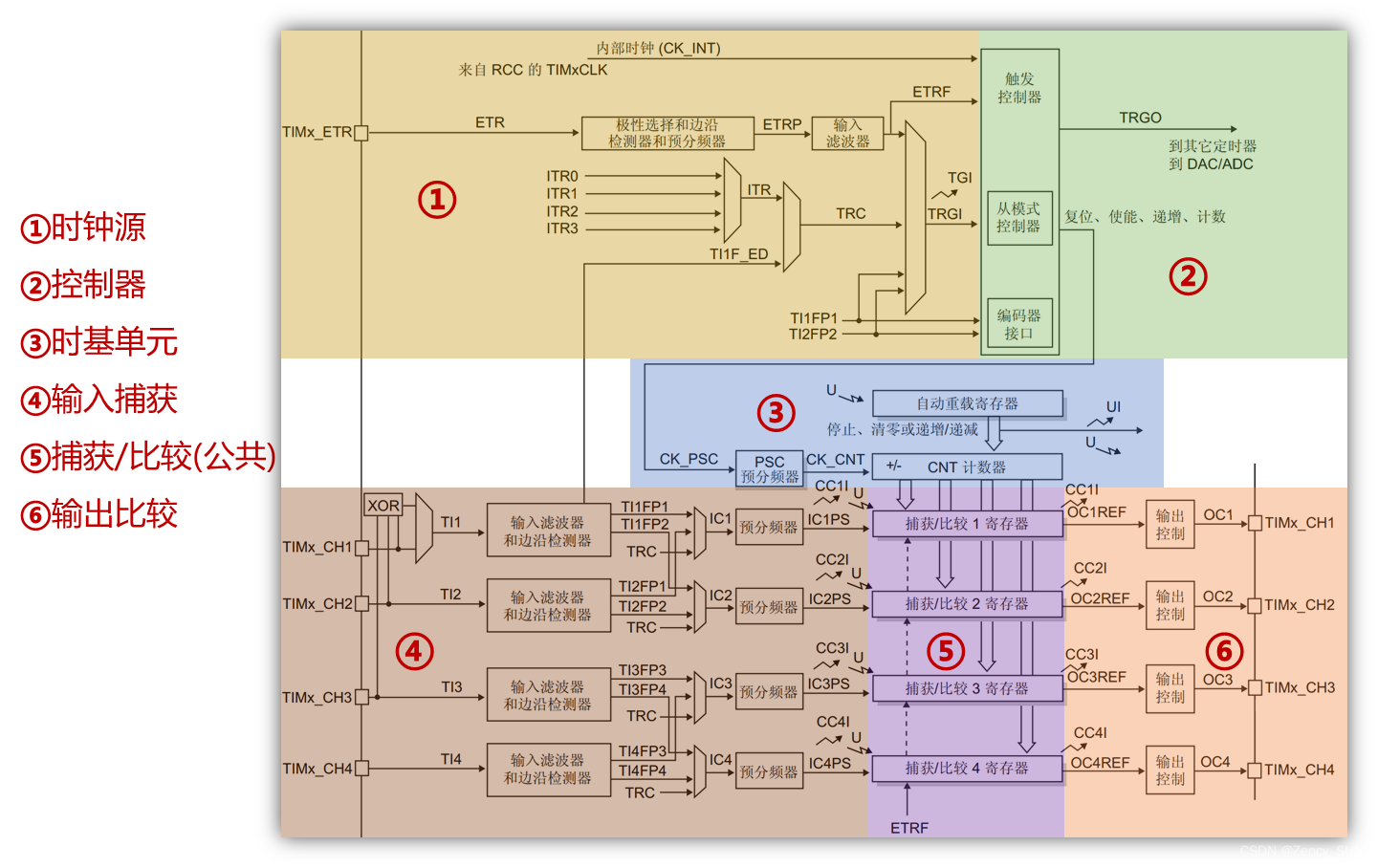
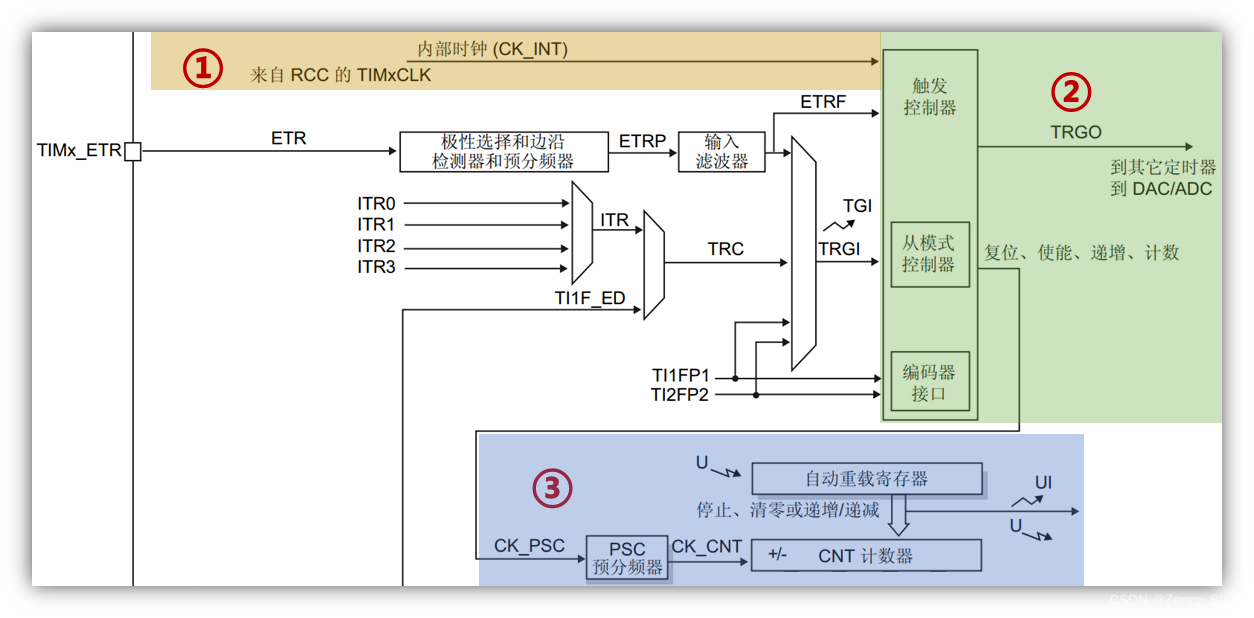
3.2.通用定时器框图
3.3.计数器时钟源
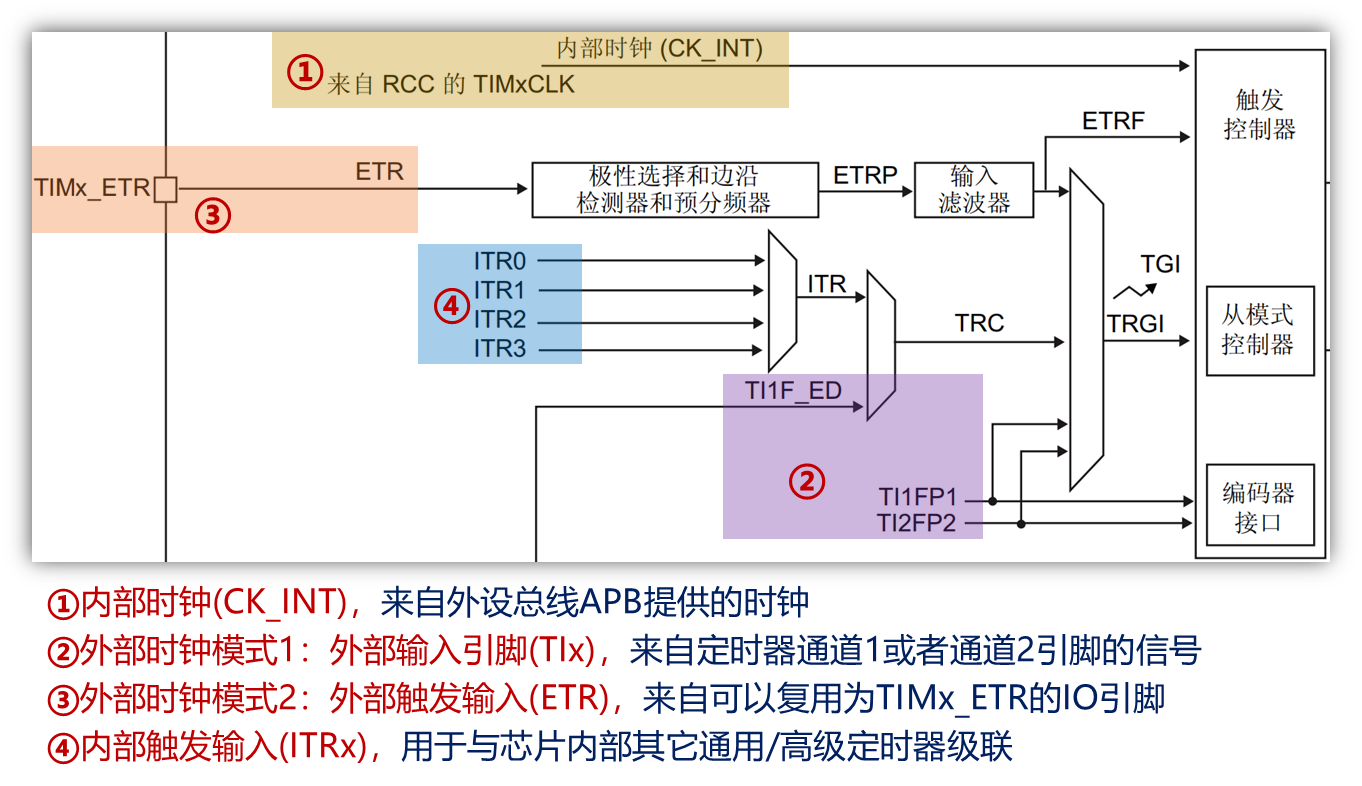
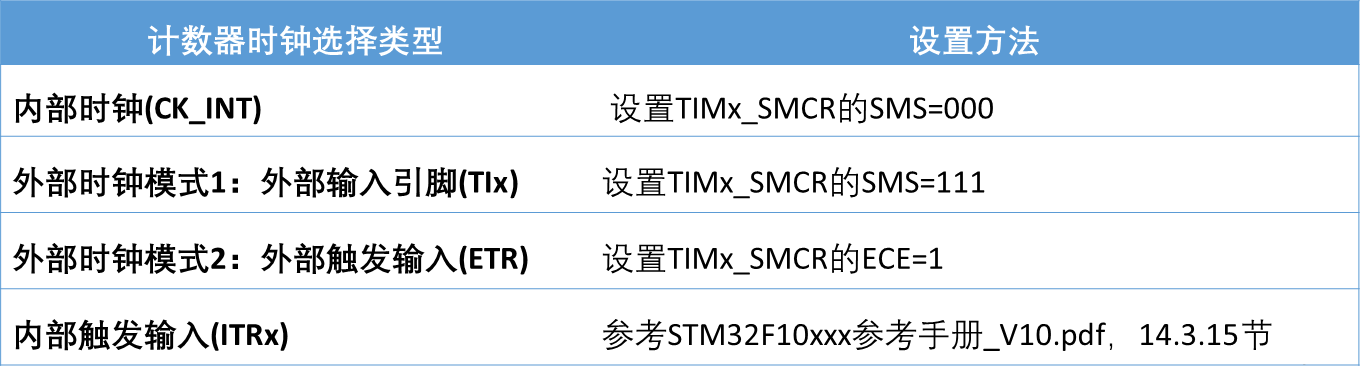
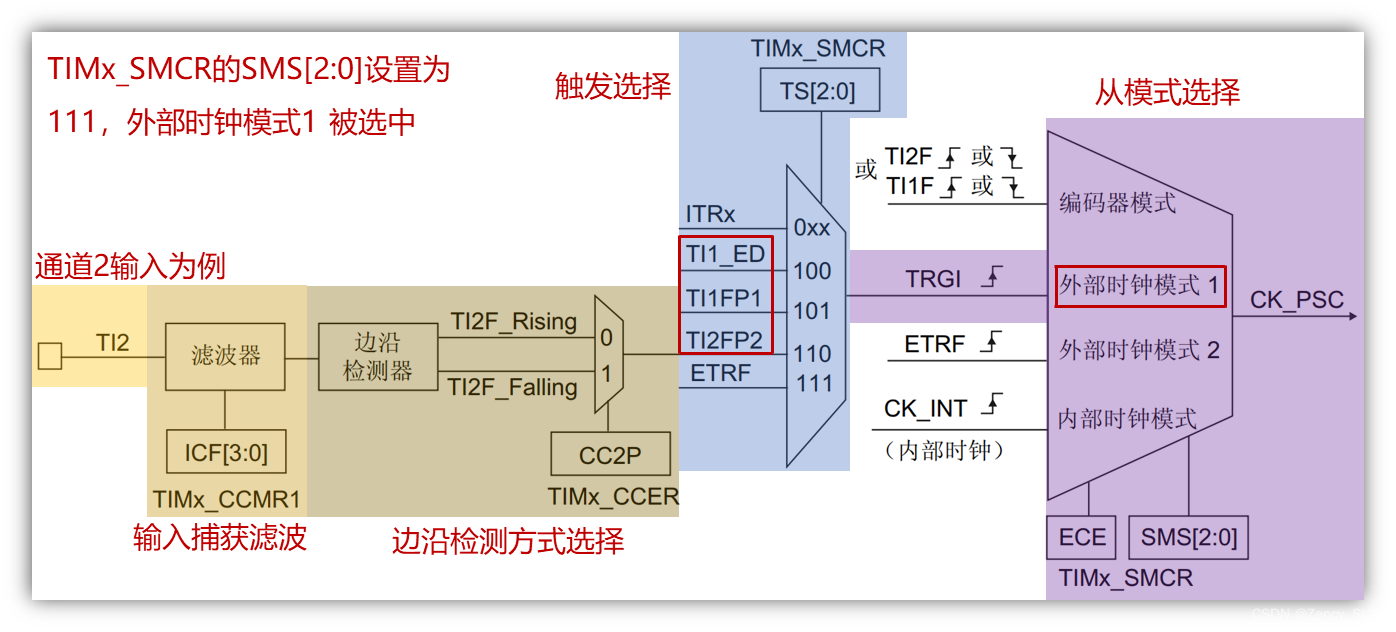
外部时钟模式1
外部时钟模式2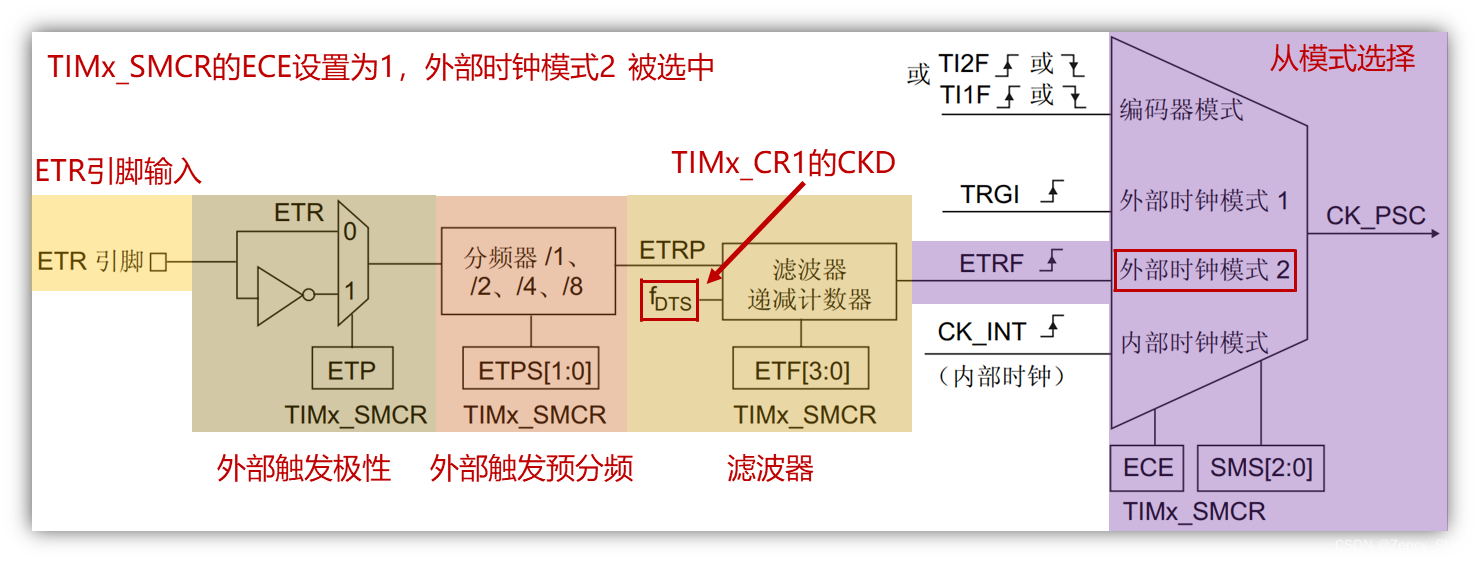
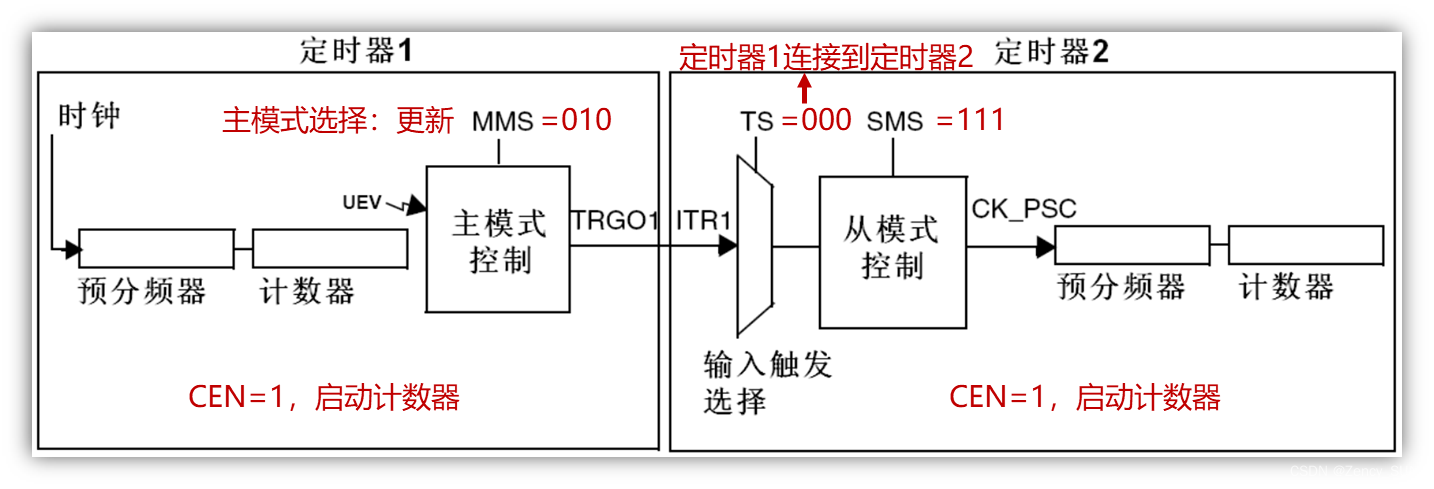
内部触发
使用一个定时器作为另一个定时器的预分频器(F1为例)
【小插曲——使用通用定时器进行定时器中断】
不同点:基本定时器只能递增计数,而通用定时器计数模式有三种
3.4.通用定时器PWM输出实验【输出比较】
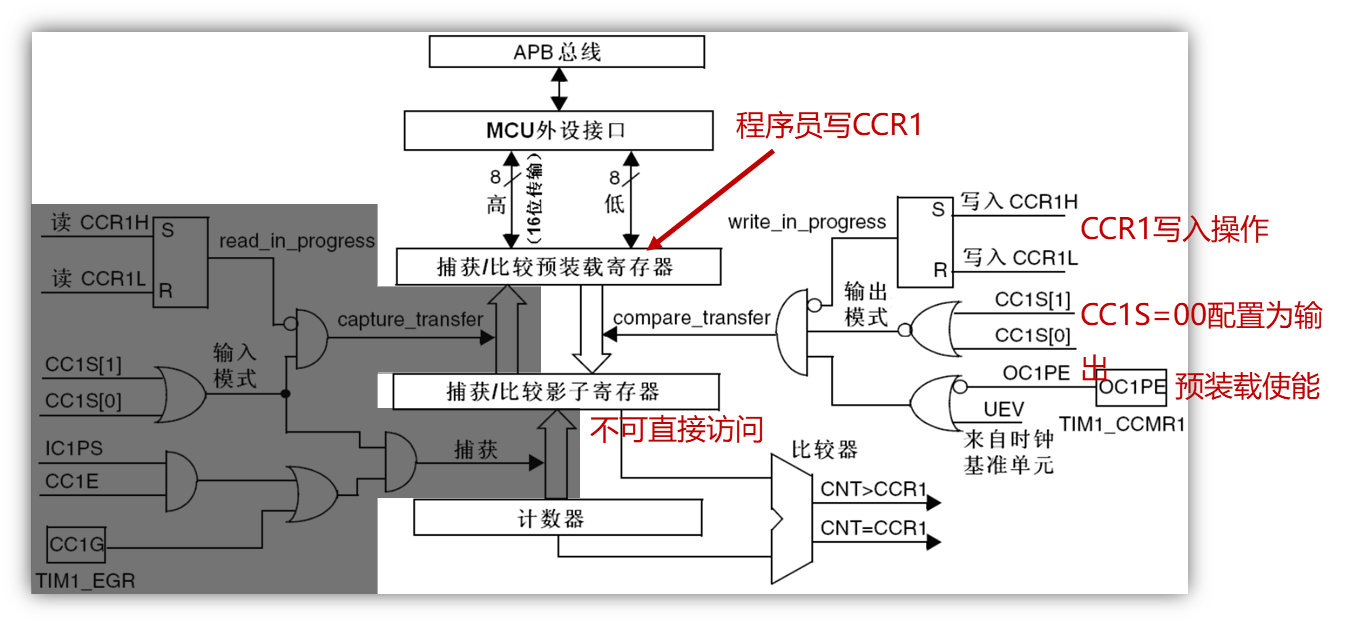
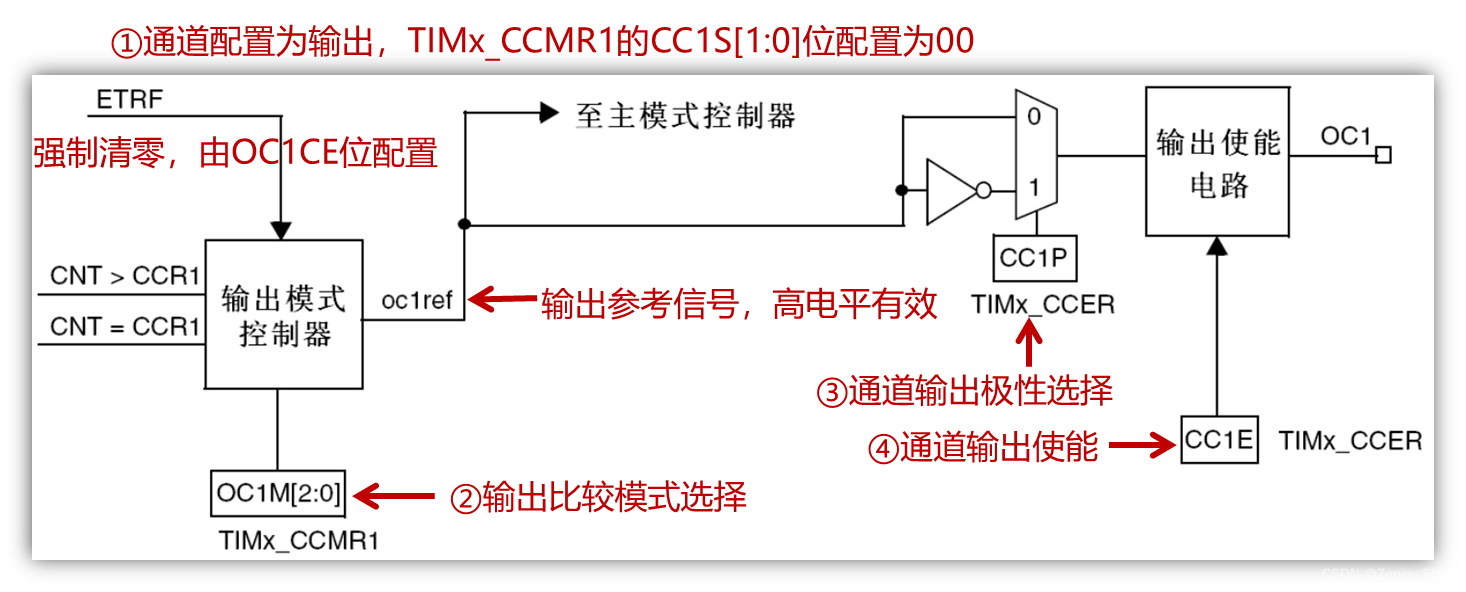
3.4.1.通用定时器输出比较部分框图介绍
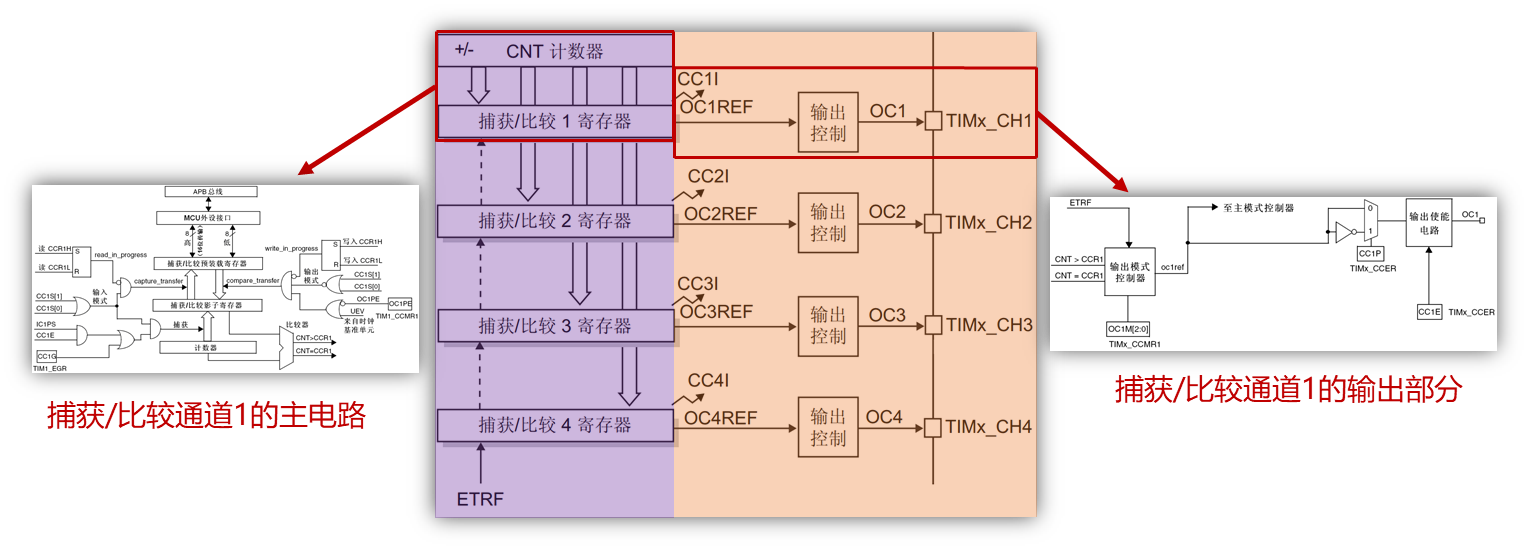
捕获/比较通道1的主电路—输出部分
捕获/比较通道的输出部分(通道1)
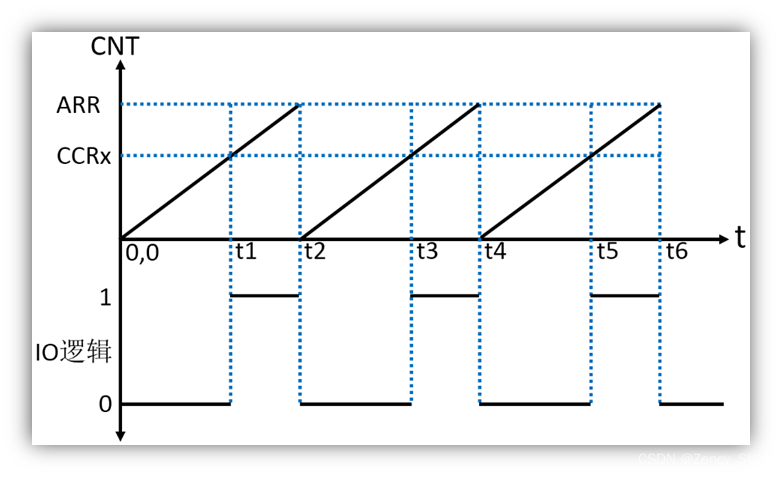
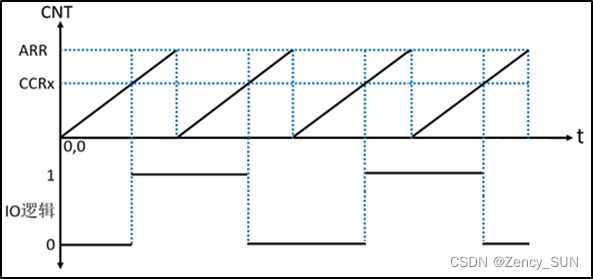
3.4.2.通用定时器输出PWM原理
假设:递增计数模式
- ARR:自动重装载寄存器的值
- CCRx:捕获/比较寄存器x的值
- 当CNT < CCRx,IO输出0
- 当CNT >= CCRx,IO输出1
总结:PWM波周期或频率由ARR决定,PWM波占空比由CCRx决定
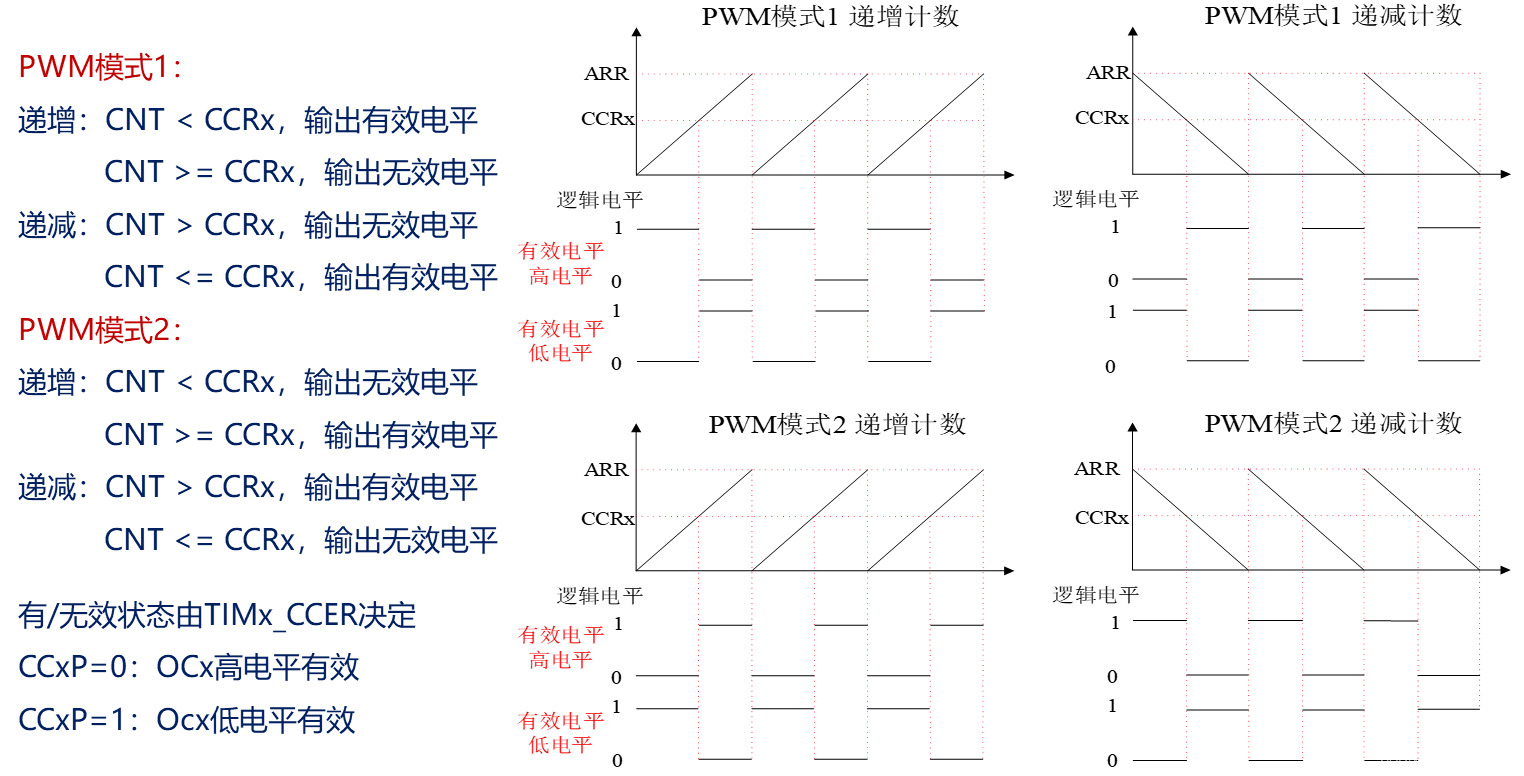
3.4.3.PWM模式
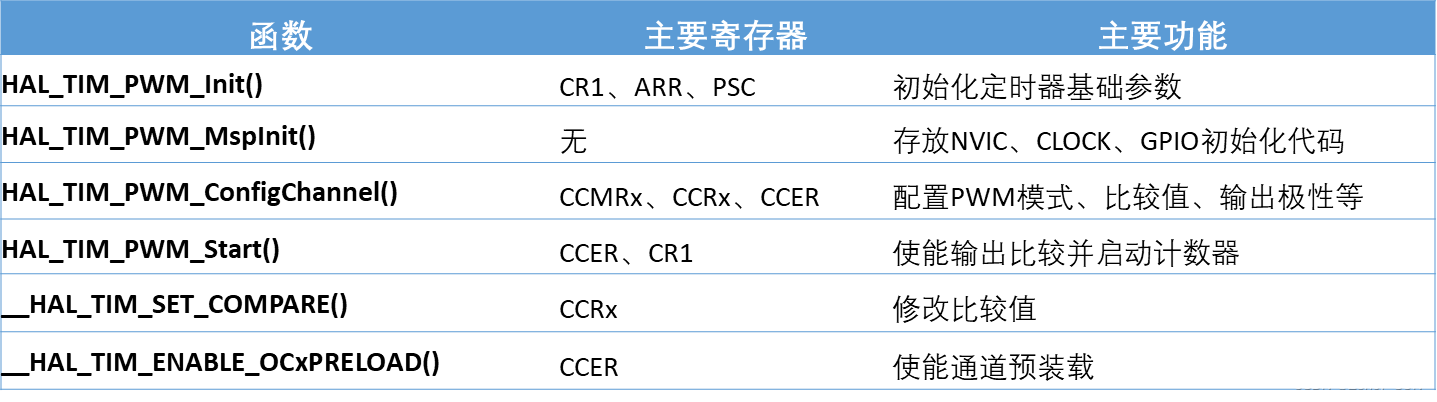
3.4.4.通用定时器PWM输出实验配置步骤
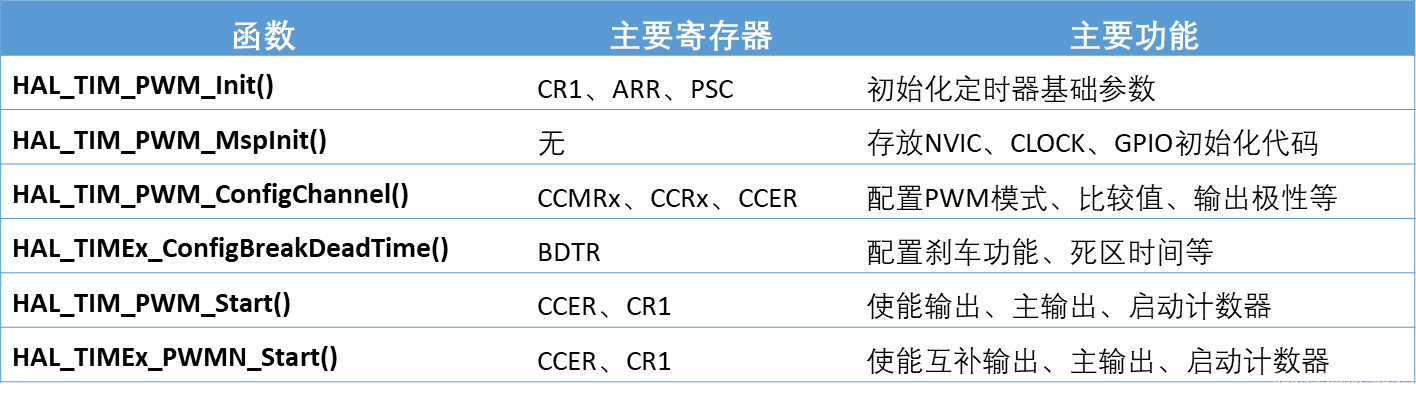
- 配置定时器基础工作参数:HAL_TIM_PWM_Init()
- 定时器PWM输出MSP初始化:HAL_TIM_PWM_MspInit() 配置NVIC、CLOCK、GPIO等
- 配置PWM模式/比较值等:HAL_TIM_PWM_ConfigChannel()
- 使能输出并启动计数器:HAL_TIM_PWM_Start()
- 修改比较值控制占空比(可选):__HAL_TIM_SET_COMPARE()
- 使能通道预装载(可选):__HAL_TIM_ENABLE_OCxPRELOAD()
关键结构体
typedef struct
{ uint32_t OCMode; /* 输出比较模式选择 */uint32_t Pulse; /* 设置比较值 */uint32_t OCPolarity; /* 设置输出比较极性 */uint32_t OCNPolarity; /* 设置互补输出比较极性 */uint32_t OCFastMode; /* 使能或失能输出比较快速模式 */uint32_t OCIdleState; /* 空闲状态下OC1输出 */uint32_t OCNIdleState; /* 空闲状态下OC1N输出 */
} TIM_OC_InitTypeDef;
3.4.5.编程实战:通用定时器PWM输出实验
- 通过定时器输出的PWM控制LED0,实现类似手机呼吸灯的效果。
- 2KHz为例,PSC=71,ARR=499。
- 配置输出比较模式为:PWM模式1,通道输出极性为:低电平有效。
代码暂不贴出
3.5.通用定时器输入捕获实验【输入捕获】
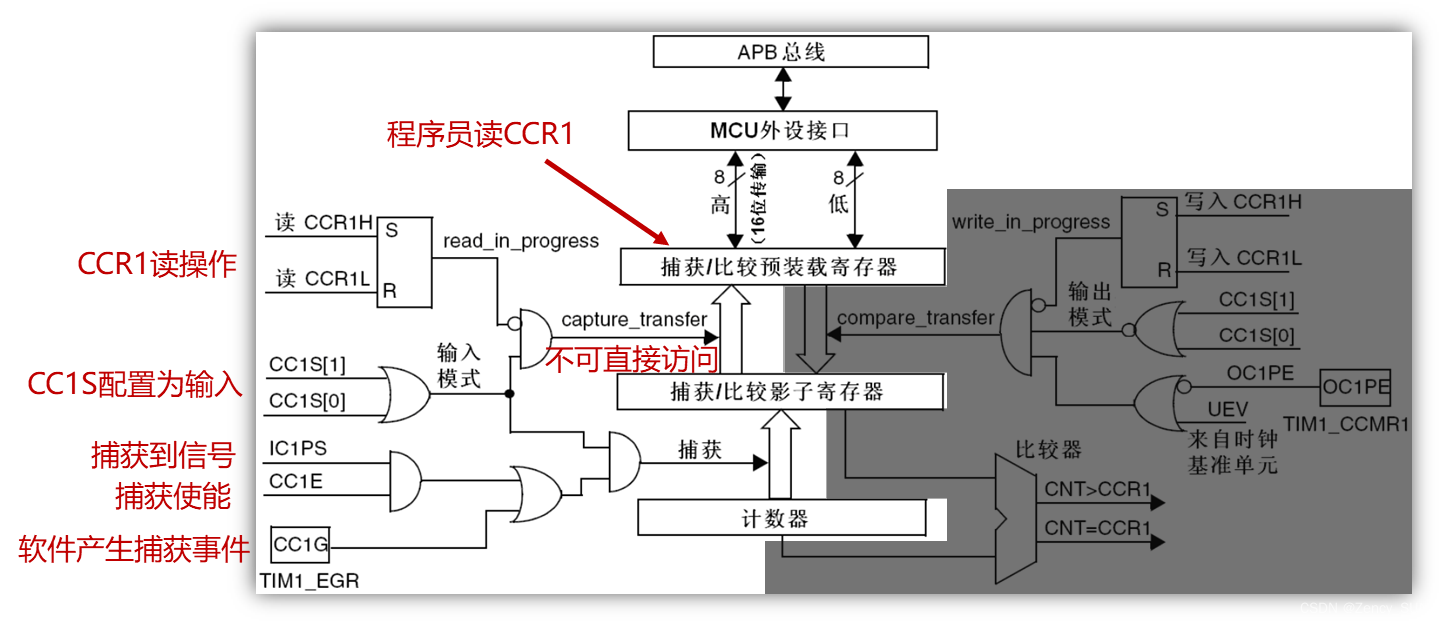
3.5.1.通用定时器输入捕获部分框图介绍
捕获/比较通道的输入部分(通道1)
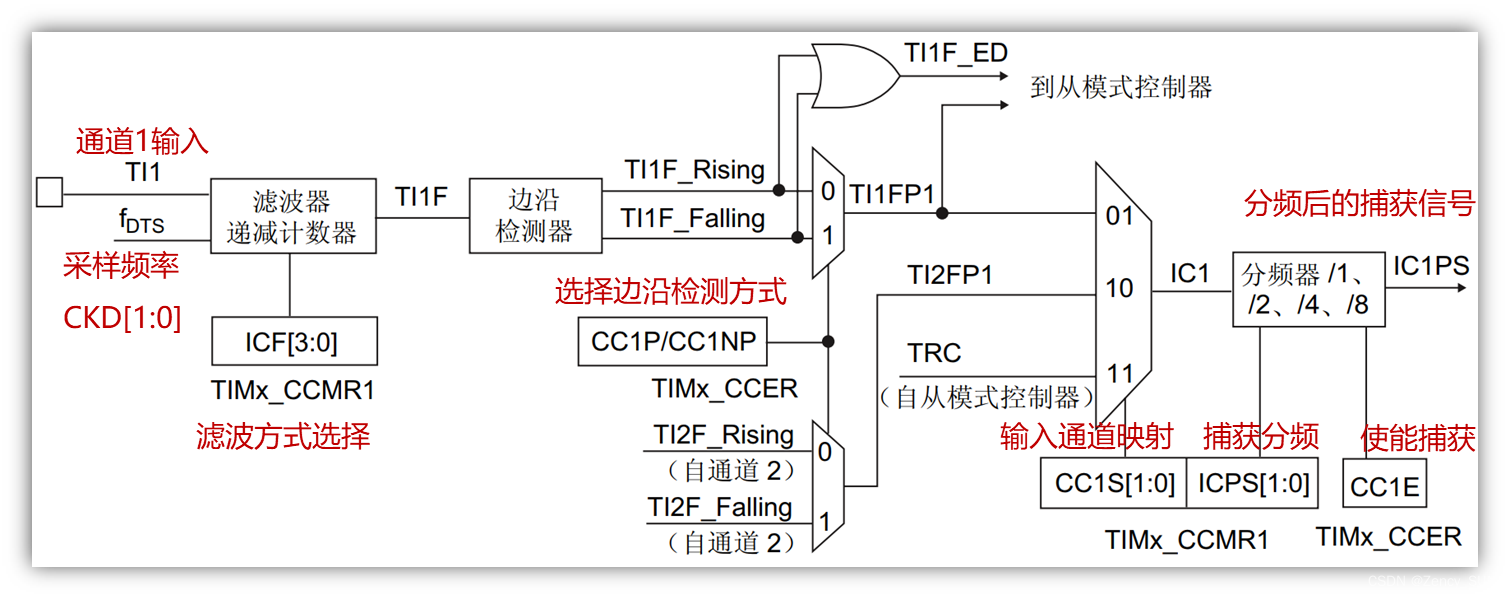
捕获/比较通道1的主电路—输入部分
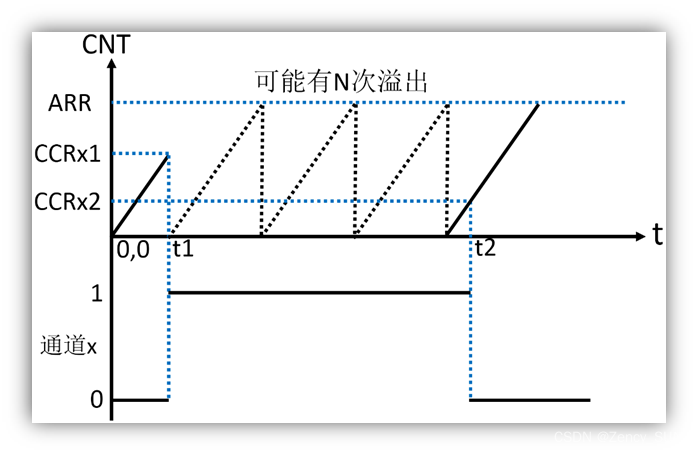
3.5.2.通用定时器输入捕获脉宽测量原理
以捕获测量高电平脉宽为例,假设:递增计数模式
- ARR:自动重装载寄存器的值
- CCRx1:t1时间点CCRx的值
- CCRx2:t2时间点CCRx的值
高电平期间,计时器计数的个数:N * (ARR+1) + CCRx2
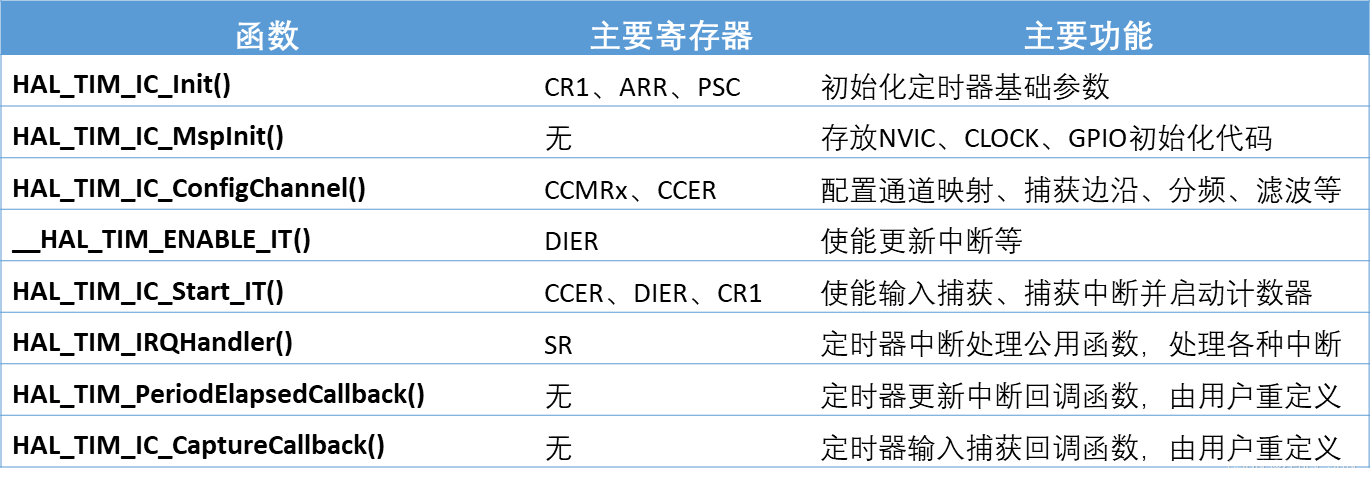
3.5.3.通用定时器输入捕获实验配置步骤
- 配置定时器基础工作参数:HAL_TIM_IC_Init()
- 定时器输入捕获MSP初始化:HAL_TIM_IC_MspInit() 配置NVIC、CLOCK、GPIO等
- 配置输入通道映射、捕获边沿等:HAL_TIM_IC_ConfigChannel()
- 设置优先级,使能中断:HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()
- 使能定时器更新中断:__HAL_TIM_ENABLE_IT()
- 使能捕获、捕获中断及计数器:HAL_TIM_IC_Start_IT()
- 编写中断服务函数:TIMx_IRQHandler()等 HAL_TIM_IRQHandler()
- 编写更新中断和捕获回调函数:HAL_TIM_PeriodElapsedCallback() HAL_TIM_IC_CaptureCallback()
关键结构体
typedef struct
{ uint32_t ICPolarity; /* 输入捕获触发方式选择,比如上升、下降沿捕获 */ uint32_t ICSelection; /* 输入捕获选择,用于设置映射关系 */ uint32_t ICPrescaler; /* 输入捕获分频系数 */ uint32_t ICFilter; /* 输入捕获滤波器设置 */
} TIM_IC_InitTypeDef;
3.5.4.编程实战:通用定时器输入捕获实验
- 通过定时器5通道1来捕获按键高电平脉宽时间,通过串口打印出来。
- 1MHz计数频率为例,PSC=71,ARR=65535。
- 配置输入捕获方式:上升沿捕获、输入通道1映射在TI1上、不分频、不滤波
代码暂不贴出
3.6.通用定时器脉冲计数实验【时钟源与从模式】
3.6.1.脉冲计数实验原理
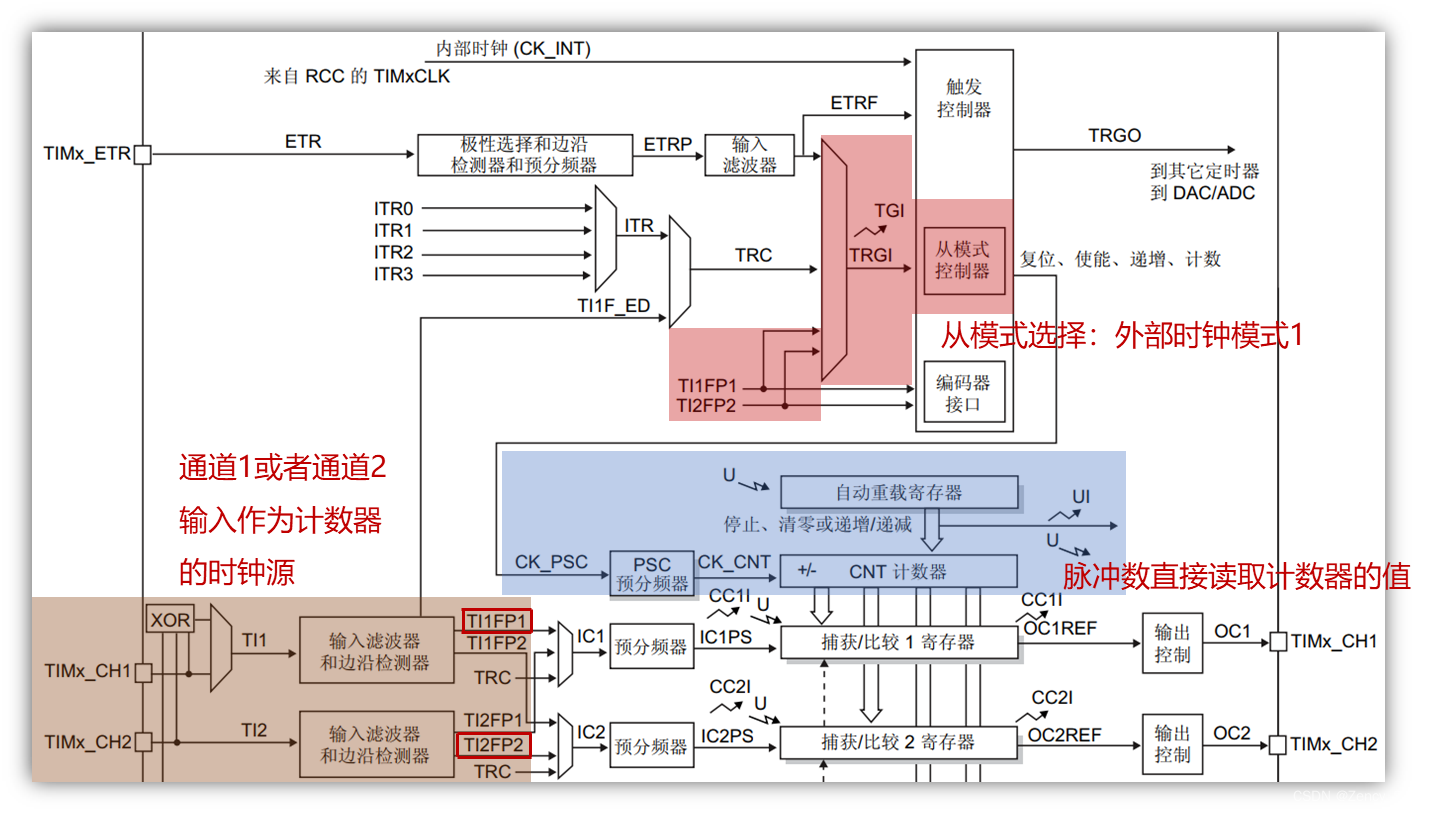
外部时钟模式1
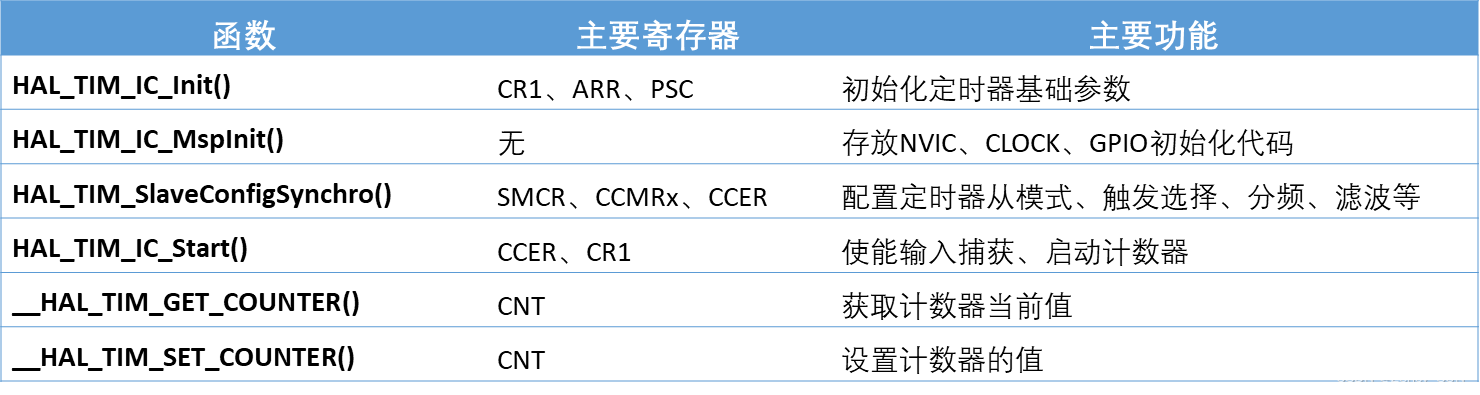
3.6.2.通用定时器脉冲计数实验配置步骤
- 配置定时器基础工作参数:HAL_TIM_IC_Init()
- 定时器输入捕获MSP初始化:HAL_TIM_IC_MspInit() 配置NVIC、CLOCK、GPIO等
- 配置定时器从模式等:HAL_TIM_SlaveConfigSynchro()
- 使能输入捕获并启动计数器:HAL_TIM_IC_Start()
- 获取计数器的值:__HAL_TIM_GET_COUNTER()
- 设置计数器的值:__HAL_TIM_SET_COUNTER()
关键结构体
typedef struct
{ uint32_t SlaveMode; /* 从模式选择 */ uint32_t InputTrigger; /* 输入触发源选择 */ uint32_t TriggerPolarity; /* 输入触发极性 */ uint32_t TriggerPrescaler; /* 输入触发预分频 */ uint32_t TriggerFilter; /* 输入滤波器设置 */
} TIM_SlaveConfigTypeDef;
3.6.3.编程实战:通用定时器脉冲计数实验
- 将定时器2通道1输入的高电平脉冲作为定时器2的时钟,并通过串口打印脉冲数。
- PSC=0,ARR=65535
- 配置从模式:外部时钟模式1、触发选择、上升沿触发、不分频、不滤波
代码暂不贴出
4.高级定时器(以F1为例)
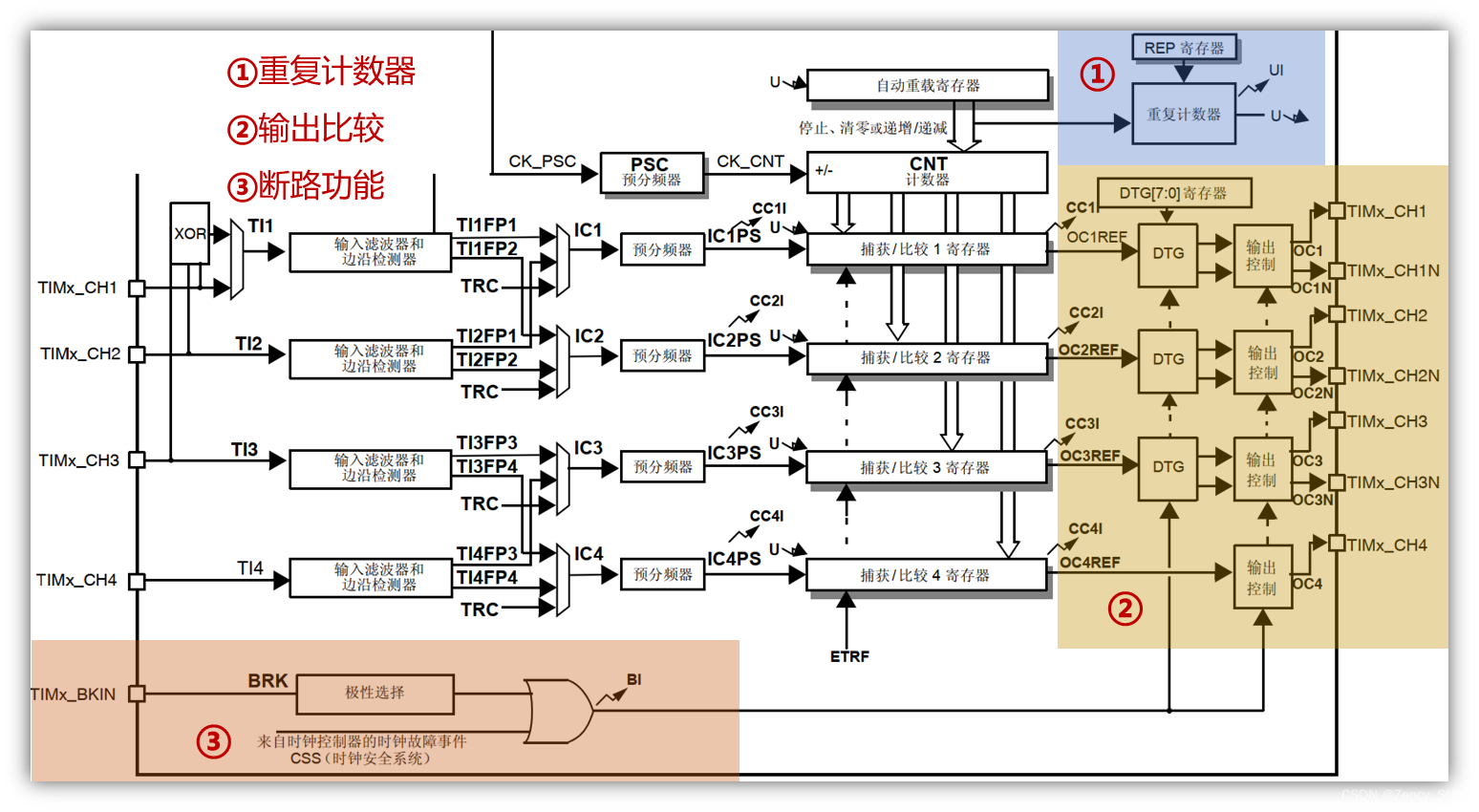
4.1.高级定时器简介
- 高级定时器 :TIM1/TIM8
- 主要特性:
16位递增、递减、中心对齐计数器(计数值:0~65535)
16位预分频器(分频系数:1~65536)
可用于触发DAC、ADC
在更新事件、触发事件、输入捕获、输出比较时,会产生中断/DMA请求
4个独立通道,可用于:输入捕获、输出比较、输出PWM、单脉冲模式
使用外部信号控制定时器且可实现多个定时器互连的同步电路
支持编码器和霍尔传感器电路等
重复计数器
死区时间带可编程的互补输出
断路输入,用于将定时器的输出信号置于用户可选的安全配置中
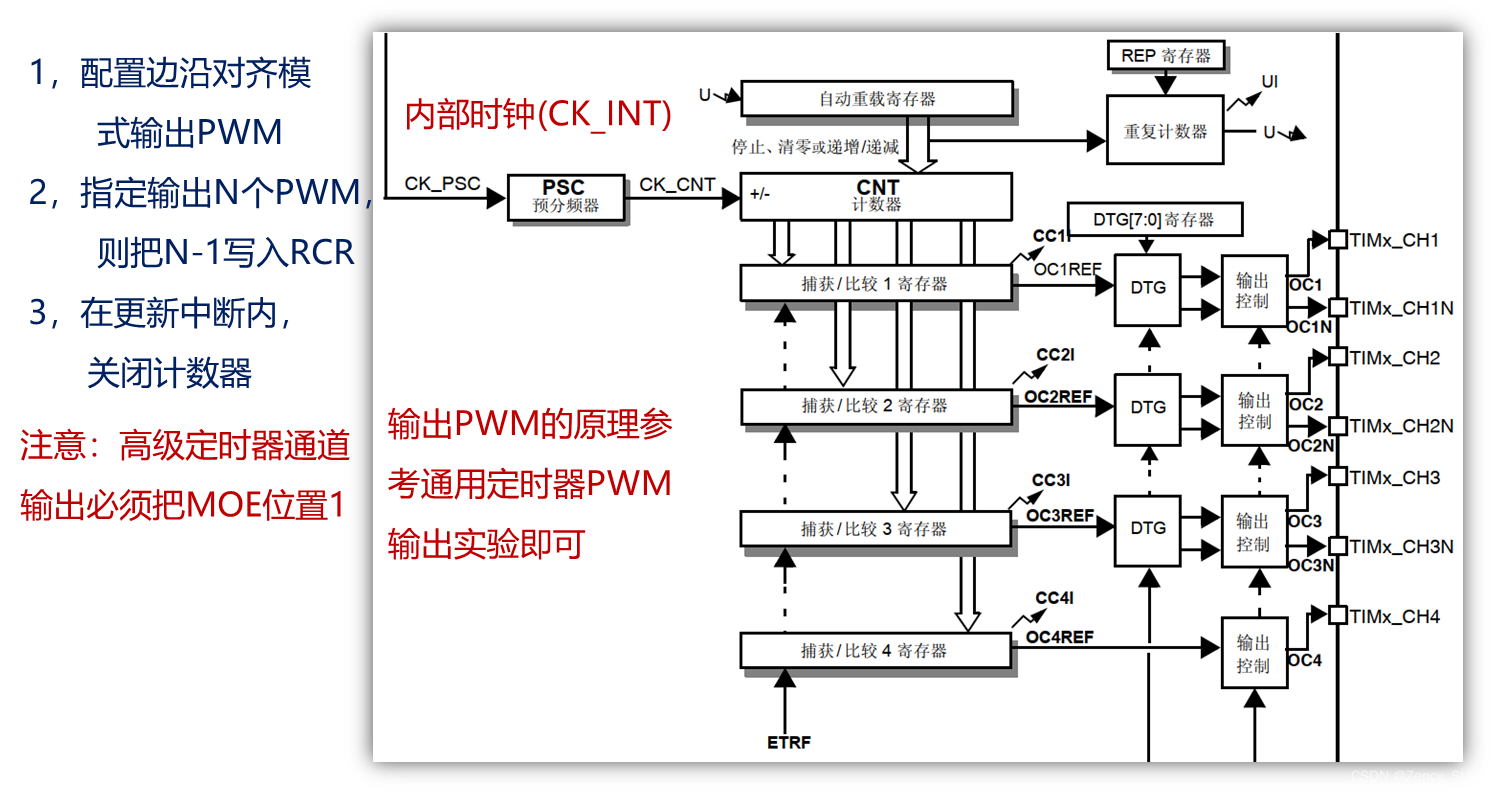
4.2.高级定时器框图
4.3.高级定时器输出指定个数PWM实验【重复计数】
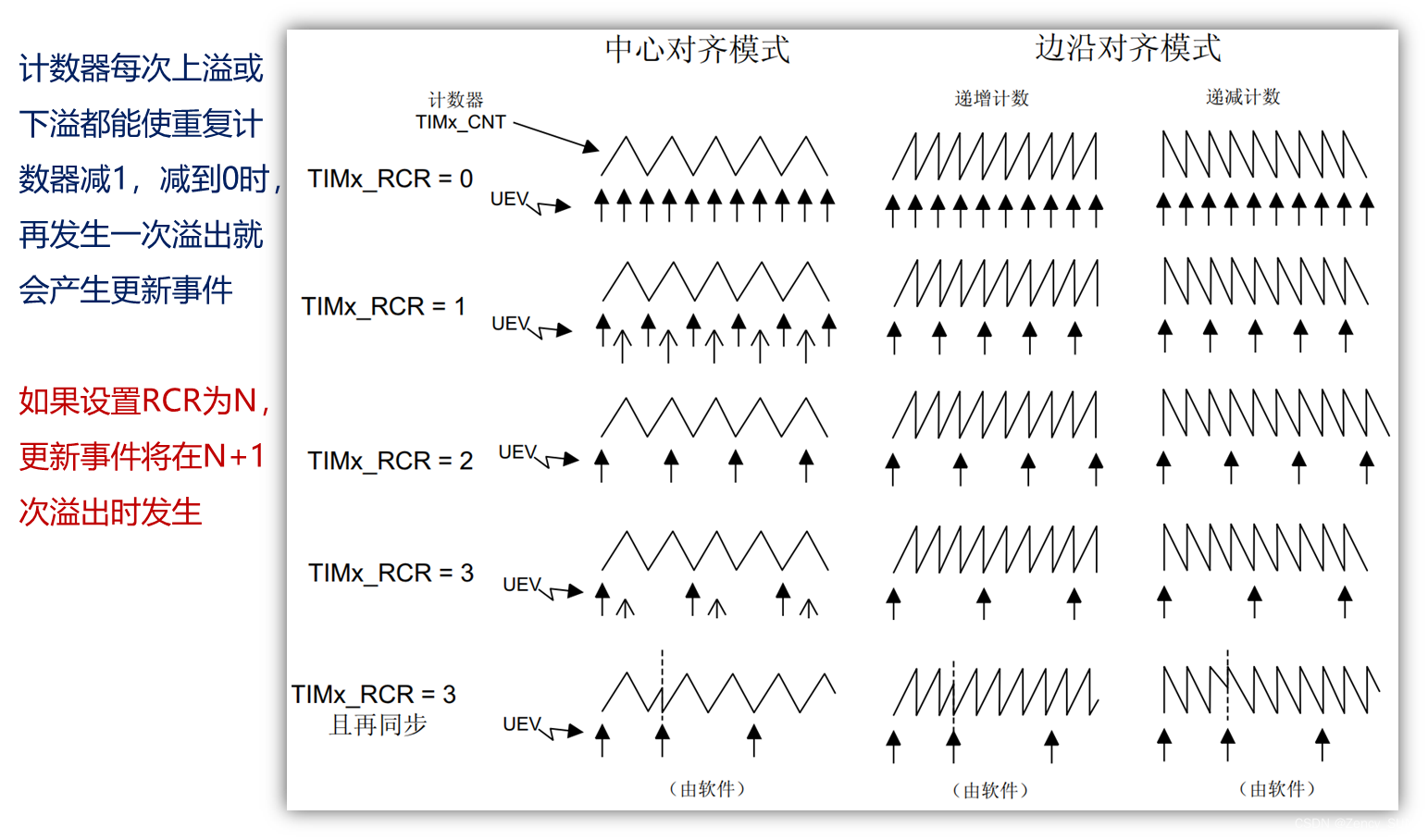
4.3.1.重复计数器特性
4.3.2.高级定时器输出指定个数PWM实验原理
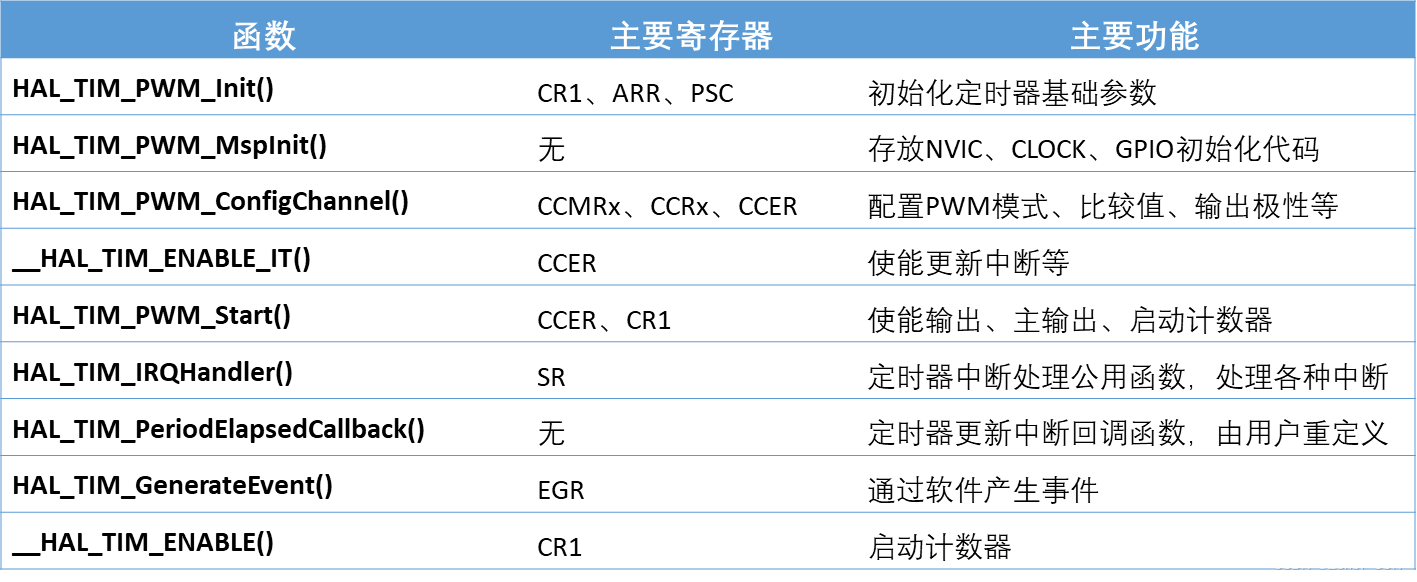
4.3.3.高级定时器输出指定个数PWM实验配置步骤
- 配置定时器基础工作参数:HAL_TIM_PWM_Init()
- 定时器PWM输出MSP初始化:HAL_TIM_PWM_MspInit() 配置NVIC、CLOCK、GPIO等
- 配置PWM模式/比较值等:HAL_TIM_PWM_ConfigChannel()
- 设置优先级,使能中断:HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()
- 使能定时器更新中断:__HAL_TIM_ENABLE_IT()
- 使能输出、主输出、计数器:HAL_TIM_PWM_Start()
- 编写中断服务函数:TIMx_IRQHandler()等 -> HAL_TIM_IRQHandler()
- 编写更新中断回调函数:HAL_TIM_PeriodElapsedCallback()
关键结构体
typedef struct
{ uint32_t OCMode; /* 输出比较模式选择 */uint32_t Pulse; /* 设置比较值 */uint32_t OCPolarity; /* 设置输出比较极性 */uint32_t OCNPolarity; /* 设置互补输出比较极性 */uint32_t OCFastMode; /* 使能或失能输出比较快速模式 */uint32_t OCIdleState; /* 空闲状态下OC1输出 */uint32_t OCNIdleState; /* 空闲状态下OC1N输出 */
} TIM_OC_InitTypeDef;
4.3.4编程实战:高级定时器输出指定个数PWM实验
- 通过定时器8通道1实现指定个数PWM输出,用于控制LED1的亮灭
- 2Hz为例,PSC=7199,ARR=4999
- 配置输出比较模式为:PWM模式1
- 通道输出极性为:高电平有效
- 占空比:50%
代码暂不贴出
4.4.高级定时器输出比较模式实验【输出比较-翻转】
4.4.1.高级定时器输出比较模式实验原理
- 输出比较模式:翻转
- 当CNT = CCRx,OCxREF电平翻转
总结:PWM波周期或频率由ARR决定,占空比固定50%,相位由CCRx决定
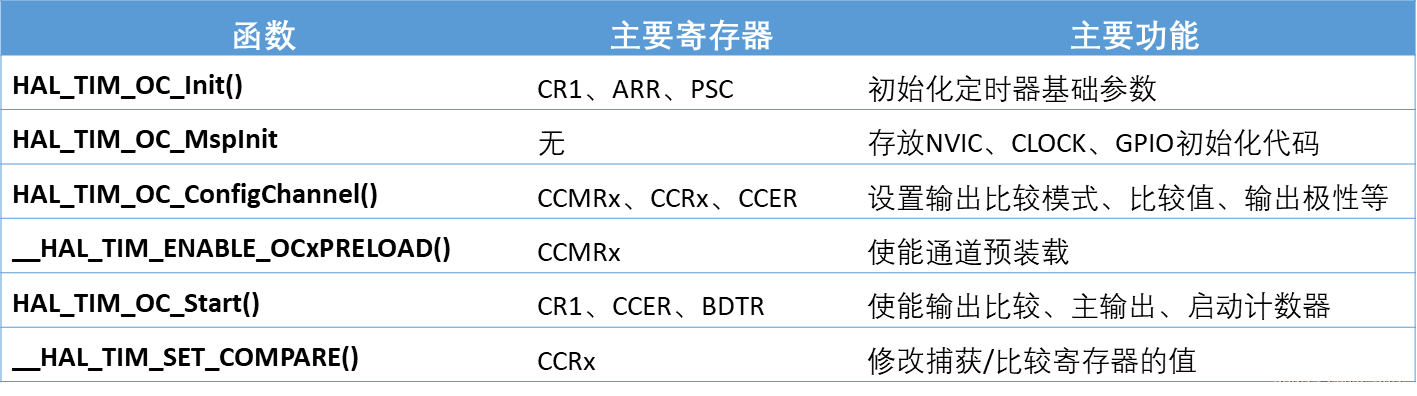
4.4.2.高级定时器输出比较模式实验配置步骤
- 配置定时器基础工作参数:HAL_TIM_OC_Init()
- 定时器输出比较MSP初始化:HAL_TIM_OC_MspInit() 配置NVIC、CLOCK、GPIO等
- 配置输出比较模式等:HAL_TIM_OC_ConfigChannel()
- 使能通道预装载:__HAL_TIM_ENABLE_OCxPRELOAD()
- 使能输出、主输出、计数器:HAL_TIM_OC_Start()
- 修改捕获/比较寄存器的值:__HAL_TIM_SET_COMPARE()
关键结构体
typedef struct
{ uint32_t OCMode; /* 输出比较模式选择 */uint32_t Pulse; /* 设置比较值 */uint32_t OCPolarity; /* 设置输出比较极性 */uint32_t OCNPolarity; /* 设置互补输出比较极性 */uint32_t OCFastMode; /* 使能或失能输出比较快速模式 */uint32_t OCIdleState; /* 空闲状态下OC1输出 */uint32_t OCNIdleState; /* 空闲状态下OC1N输出 */
} TIM_OC_InitTypeDef;
4.4.3.编程实战:高级定时器输出比较模式实验
- 通过定时器8通道1/2/3/4输出相位分别为25%、50%、75%、100%的PWM
- 1KHz为例,PSC=71,ARR=999
- 配置输出比较模式为:翻转
- 通道输出极性为:高电平有效
代码暂不贴出
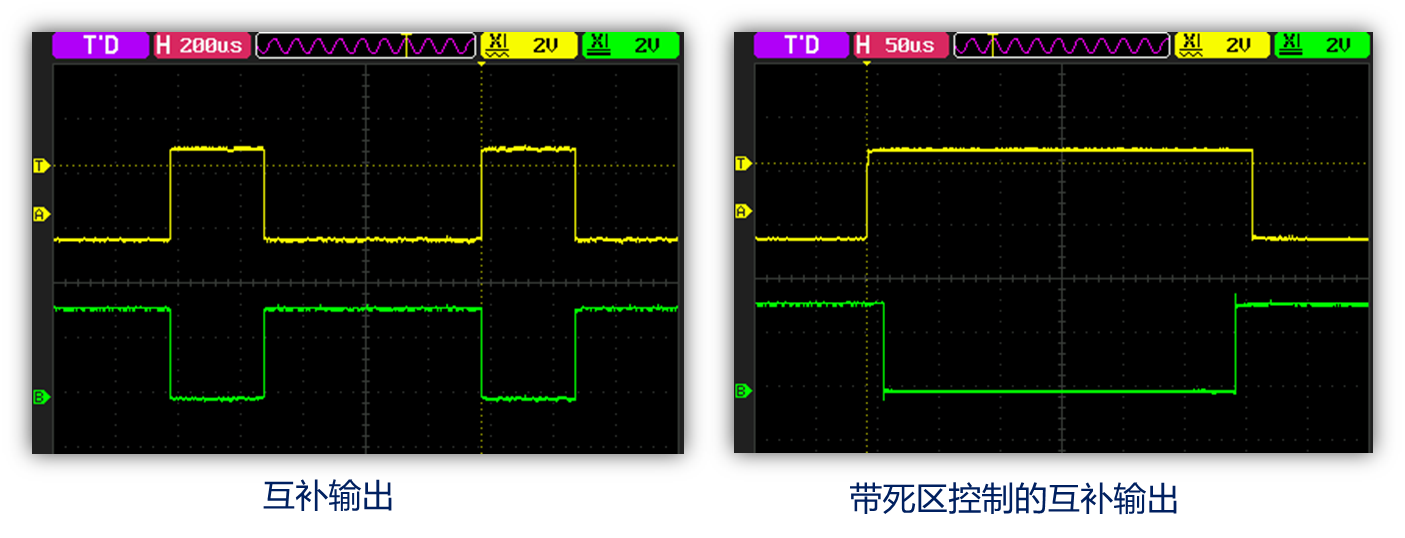
4.5.高级定时器互补输出带死区控制实验【互补输出、死区、刹车】
4.5.1,互补输出,带死区控制
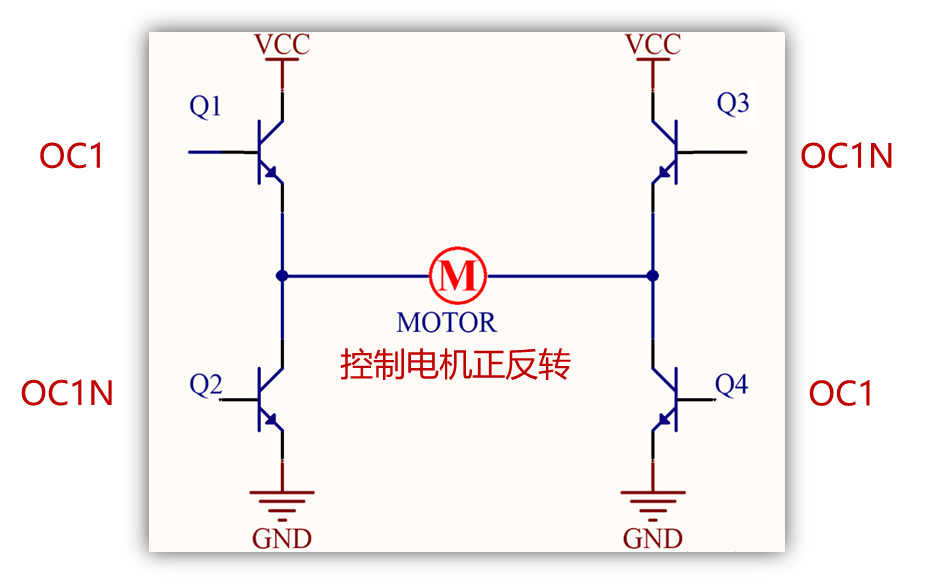
4.5.2,带死区控制的互补输出应用之H桥
由于元器件是有延迟特性,所以需要加上死区时间控制
4.5.3,捕获/比较通道的输出部分(通道1至3)

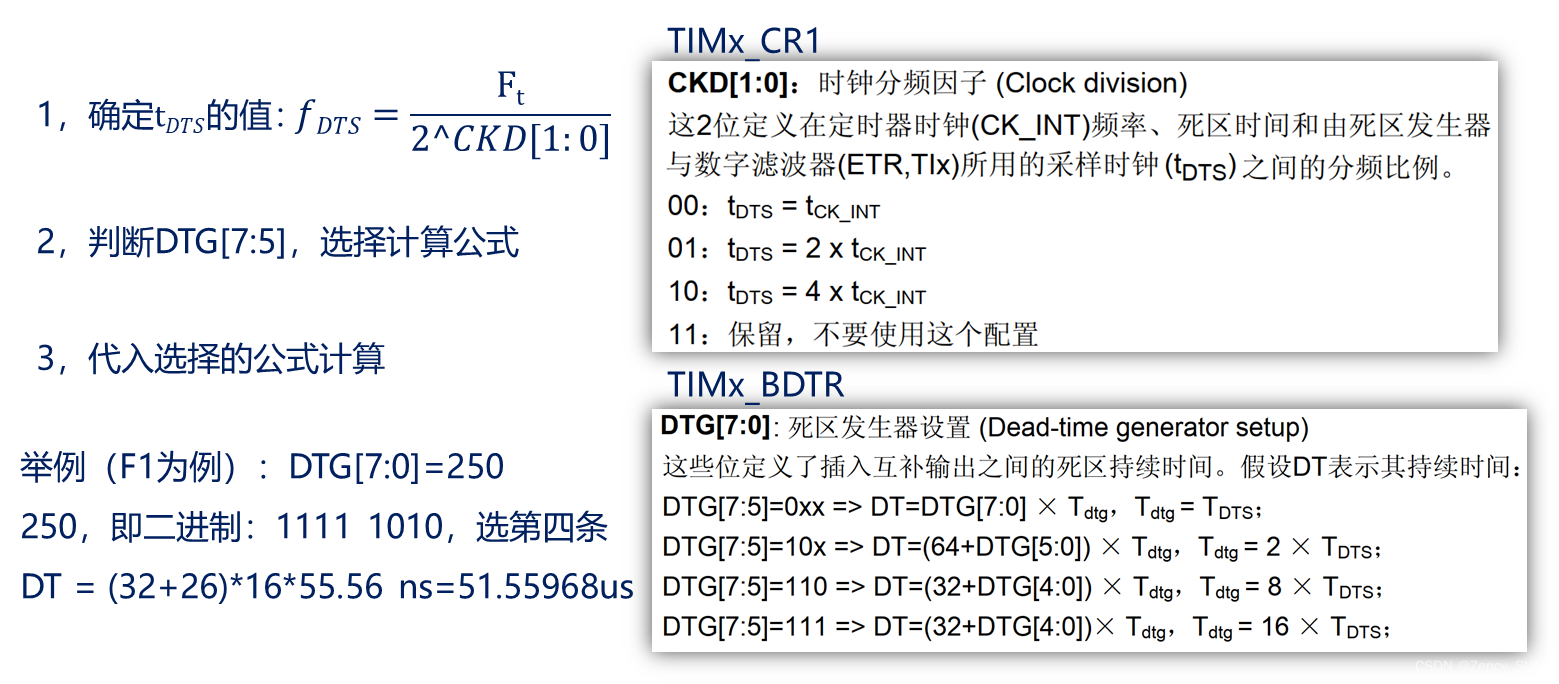
4.5.4,死区时间计算
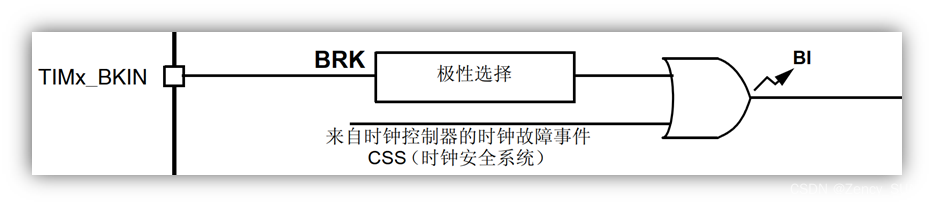
4.5.5,刹车(断路)功能
- 使能刹车功能:将TIMx_BDTR的BKE位置1,刹车输入信号极性由BKP位设置
- 使能刹车功能后:由TIMx_BDTR的MOE、OSSI、OSSR位,TIMx_CR2的OISx、OISxN位,TIMx_CCER的CCxE、CCxNE位控制OCx和OCxN输出状态
无论何时,OCx和OCxN输出都不能同时处在有效电平
发生刹车后的现象
- MOE位被清零,OCx和OCxN为无效、空闲或复位状态(OSSI位选择)
- OCx和OCxN的状态:由相关控制位状态决定,当使用互补输出时:根据情况自动控制输出电平,参考参考手册使用刹车(断路)功能小节
- BIF位置1,如果使能了BIE位,还会产生刹车中断;如果使能了TDE位,会产生DMA请求
- 如果AOE位置 1,在下一个 更新事件UEV时,MOE位被自动置 1
4.5.6,高级定时器互补输出带死区控制实验配置步骤
1,配置定时器基础工作参数HAL_TIM_PWM_Init()
2,定时器PWM输出MSP初始化HAL_TIM_PWM_MspInit() 配置NVIC、CLOCK、GPIO等
3,配置PWM模式/比较值等HAL_TIM_PWM_ConfigChannel()
4,配置刹车功能、死区时间等HAL_TIMEx_ConfigBreakDeadTime()
5,使能输出、主输出、计数器HAL_TIM_PWM_Start()
6,使能互补输出、主输出、计数器HAL_TIMEx_PWMN_Start()
关键结构体
typedef struct
{ uint32_t OCMode; /* 输出比较模式选择 */uint32_t Pulse; /* 设置比较值 */uint32_t OCPolarity; /* 设置输出比较极性 */uint32_t OCNPolarity; /* 设置互补输出比较极性 */uint32_t OCFastMode; /* 使能或失能输出比较快速模式 */uint32_t OCIdleState; /* 空闲状态下OC1输出 */uint32_t OCNIdleState; /* 空闲状态下OC1N输出 */
} TIM_OC_InitTypeDef;
typedef struct
{uint32_t OffStateRunMode; /* 运行模式下的关闭状态选择 */ uint32_t OffStateIDLEMode; /* 空闲模式下的关闭状态选择 */ uint32_t LockLevel; /* 寄存器锁定设置 */ uint32_t DeadTime; /* 死区时间设置 */ uint32_t BreakState; /* 是否使能刹车功能 */ uint32_t BreakPolarity; /* 刹车输入极性 */ uint32_t BreakFilter; /* 刹车输入滤波器(F1/F4系列没有) */ uint32_t AutomaticOutput; /* 自动恢复输出使能,即使能AOE位 */
} TIM_BreakDeadTimeConfigTypeDef;
4.5.7,编程实战:高级定时器互补输出带死区控制实验
- 通过定时器1通道1输出频率为1KHz,占空比为70%的PWM,使用PWM模式1
- 使能互补输出并设置死区时间控制:设置DTG为100(5.56us),进行验证死区时间是否正确
- 使能刹车功能:刹车输入信号高电平有效,配置输出空闲状态等,最后用示波器验证
- 1KHz为例,PSC=71,ARR=999
- 以H桥为例,配置通道输出极性以及互补输出极性
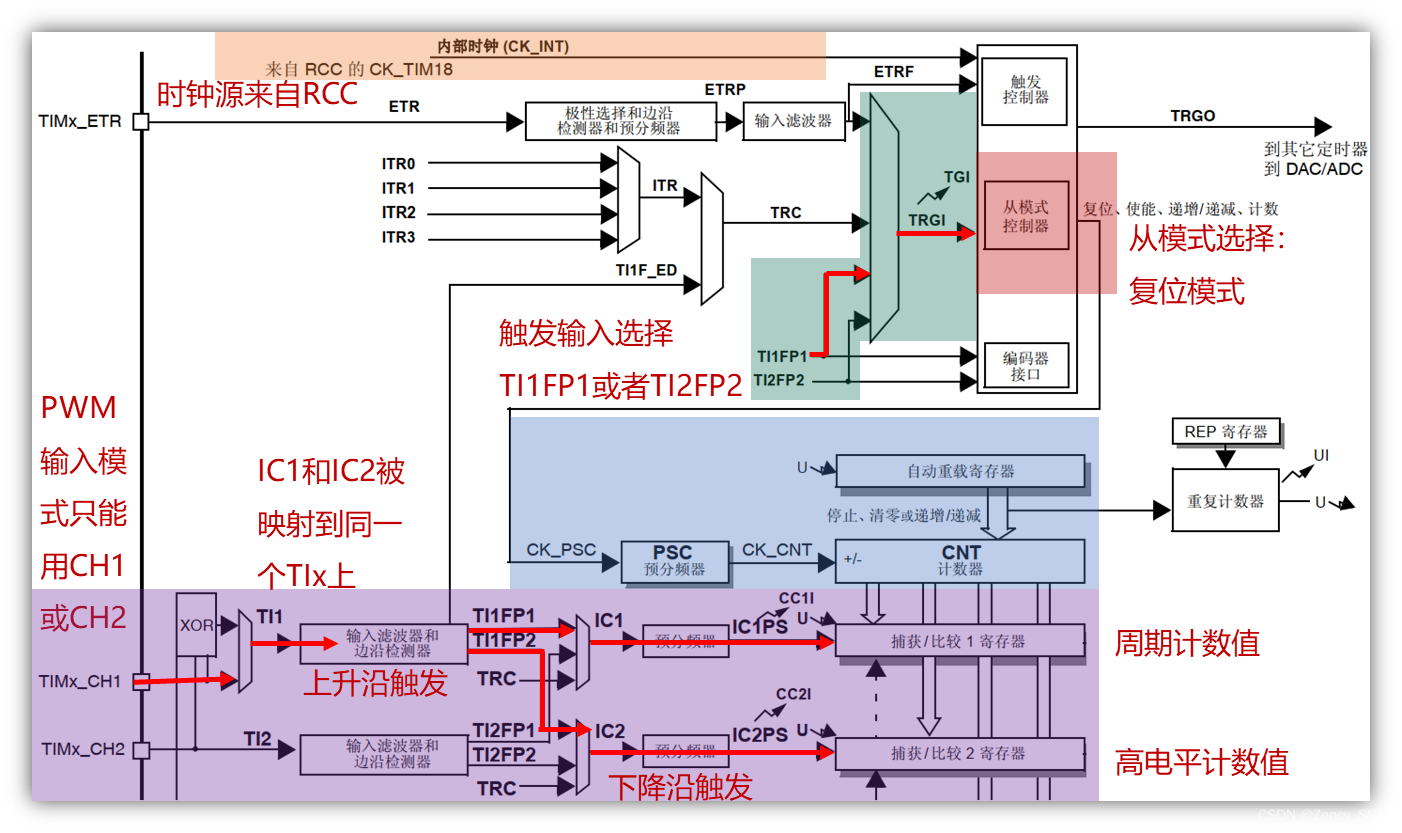
4.6.高级定时器PWM输入模式实验【输入捕获+从模式】
4.6.1.PWM输入模式工作原理
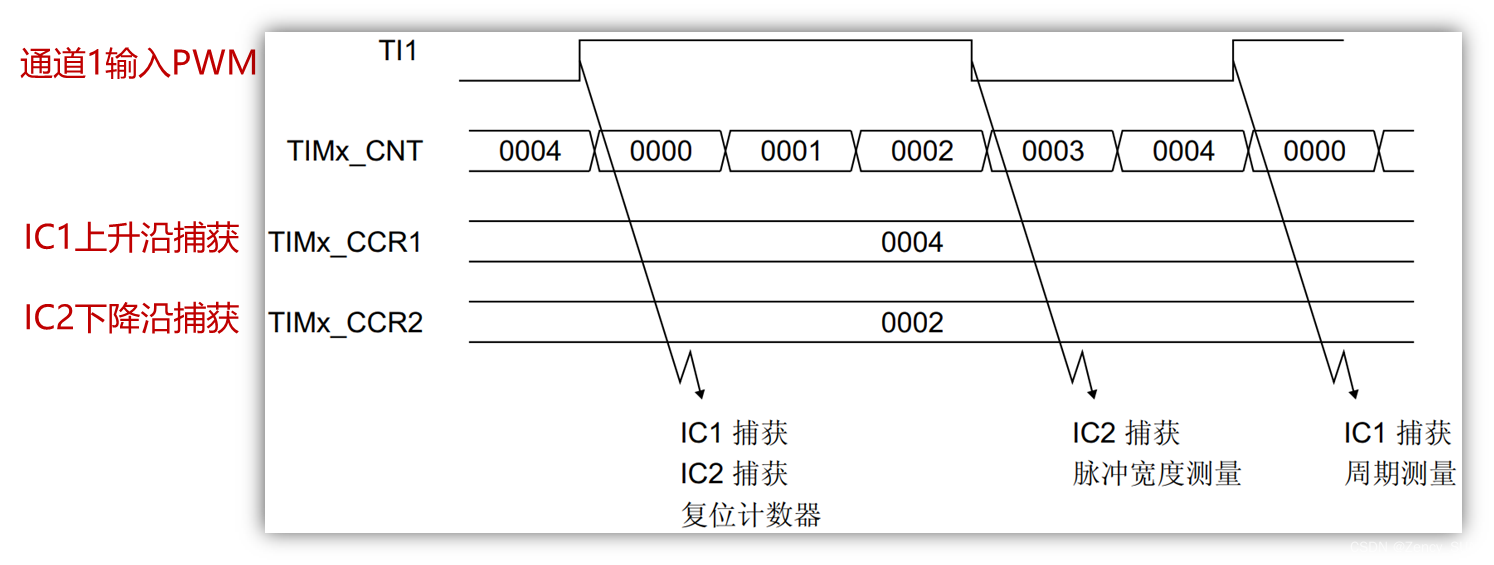
4.6.2.PWM输入模式时序
4.6.3.高级定时器PWM输入模式实验配置步骤
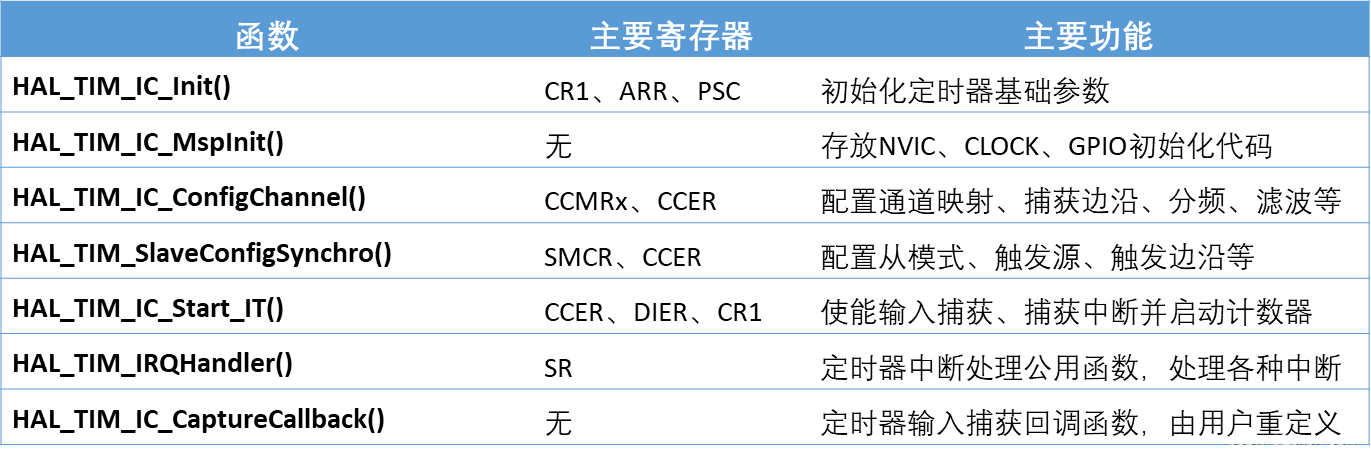
- 配置定时器基础工作参数:HAL_TIM_IC_Init()
- 定时器捕获输入MSP初始化:HAL_TIM_IC_MspInit() 配置NVIC、CLOCK、GPIO等
- 配置IC1/2映射、捕获边沿等:HAL_TIM_IC_ConfigChannel()
- 配置从模式,触发源等:HAL_TIM_SlaveConfigSynchro()
- 设置优先级,使能中断:HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()
- 使能捕获、捕获中断及计数器:HAL_TIM_IC_Start_IT()、 HAL_TIM_IC_Start()
- 编写中断服务函数:TIMx_IRQHandler()等 HAL_TIM_IRQHandler()
- 编写输入捕获回调函数:HAL_TIM_IC_CaptureCallback()
typedef struct
{ uint32_t ICPolarity; /* 输入捕获触发方式选择,比如上升、下降沿捕获 */ uint32_t ICSelection; /* 输入捕获选择,用于设置映射关系 */ uint32_t ICPrescaler; /* 输入捕获分频系数 */ uint32_t ICFilter; /* 输入捕获滤波器设置 */
} TIM_IC_InitTypeDef;
typedef struct
{ uint32_t SlaveMode; /* 从模式选择 */ uint32_t InputTrigger; /* 输入触发源选择 */ uint32_t TriggerPolarity; /* 输入触发极性 */ uint32_t TriggerPrescaler; /* 输入触发预分频 */ uint32_t TriggerFilter; /* 输入滤波器设置 */
} TIM_SlaveConfigTypeDef;
4.6.4.编程实战:高级定时器PWM输入模式实验
- 通过定时器3通道2(PB5)输出PWM
- 将PWM输入到定时器8通道1(PC6),测量PWM的频率/周期、占空比等信息
- 72MHz采样频率( 精度约13.8ns ),PSC=0,ARR=65535
- 不考虑溢出情况下,测量的最长PWM周期为910.2us
代码暂不贴出
5.实验汇总
| 序号 | 定时器类型 | 实现功能 | 要点 |
|---|---|---|---|
| 1 | 基础定时器 | 定时器中断 | 基础配置 |
| 2 | 通用定时器 | PWM输出 | 输出比较 |
| 3 | 通用定时器 | 输入脉冲测宽 | 输入捕获 |
| 4 | 通用定时器 | 脉冲计数 | 从模式(时钟源) |
| 5 | 高级定时器 | 输出n个PWM | 输出比较+重复计数 |
| 6 | 高级定时器【通用】 | 多相位PWM | 输出比较(翻转模式) |
| 7 | 高级定时器 | 互补输出PWM | 输出比较+死区控制(互补输出、刹车) |
| 8 | 高级定时器【通用】 | PWM测量 | 输入捕获+从模式 |
重要结构体汇总
- 定时器基本参数:TIM_Base_InitTypeDef
- 输出比较设置:TIM_OC_InitTypeDef
- 输入捕获设置:TIM_IC_InitTypeDef
- 从模式设置:TIM_SlaveConfigTypeDef
- 刹车与死区控制:TIM_BreakDeadTimeConfigTypeDef
相关文章:
【嵌入式学习笔记】嵌入式入门6——定时器TIMER
1.定时器概述 1.1.软件定时原理 使用纯软件(CPU死等)的方式实现定时(延时)功能有诸多缺点,如CPU死等、延时不精准。 void delay_us(uint32_t us) {us * 72;while(us--); }1.2.定时器定时原理 使用精准的时基&#…...
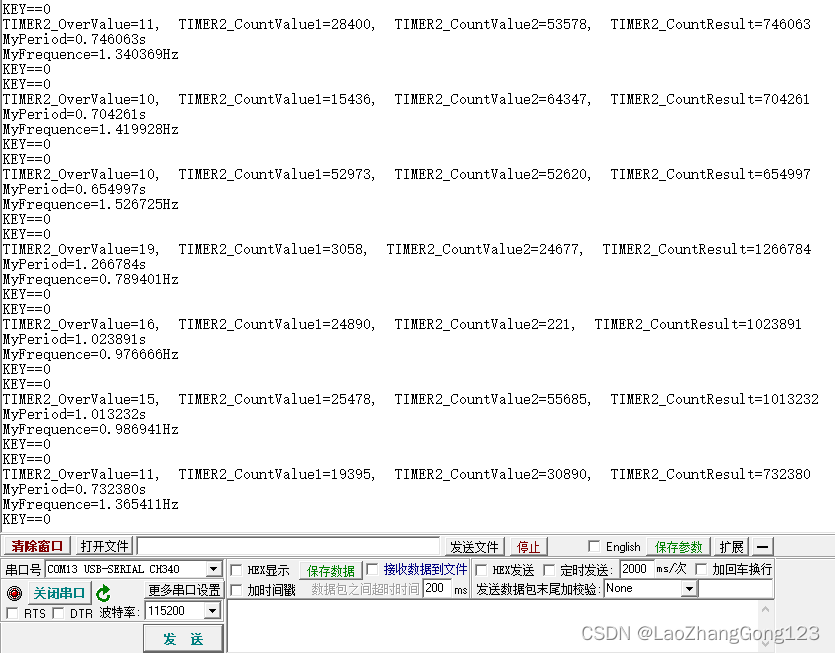
GD32F103输入捕获
GD32F103输入捕获程序,经过多次测试,终于完成了。本程序将TIMER2_CH2通道映射到PB0引脚,捕获PB0引脚低电平脉冲时间宽度。PB0是一个按钮,第1次按下采集一个值保存到TIMER2_CountValue1中,第2次按下采集一个值保存到TIM…...
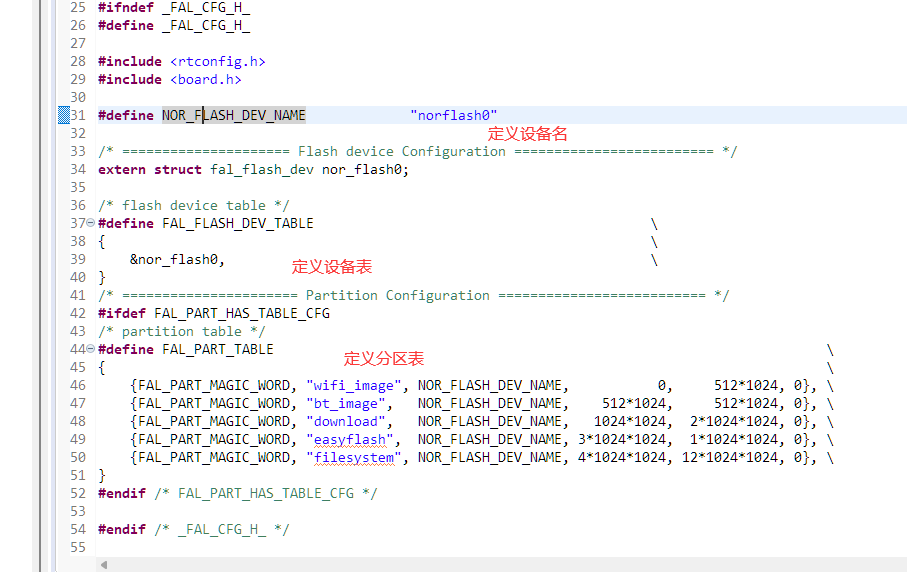
[RT-Thread]基于ARTPI的文件系统认识与搭建
[写作为了记忆,个人最终输出的内容往往是遗忘后最容易捡起的内容,故以此作文] 目录 [写作为了记忆,个人最终输出的内容往往是遗忘后最容易捡起的内容,故以此作文] 前提 内容 认识 基于ARTPI的文件系统的挂载 ROMFS与LFS. (默认自动挂载,romfs可读不可写) 搭…...

动态规划+二分查找
题目描述:给定一个区间数组,[[1,2,3],[3,4,2],[2,4,4]],每个区间有价值,求在获取k个区间的条件下面,求获得的最大的价值,关键是dp的定义和二分查找的写法(小于tar额最右下标) import…...

8.2小非农ADP数据来袭黄金将会如何表现?
近期有哪些消息面影响黄金走势?黄金多空该如何研判? 黄金消息面解析: 周二(8月1日)现货黄金价格回落,原因是美元指数升创7月10日以来新高至102.43.美联储官员乐观言论夯实美国经济软着陆预期。此外,中国刺激措施将…...

linux启动oracle
一、启动方法 方法1: Sql代码 cd $ORACLE_HOME/bin #进入到oracle的安装目录 ./dbstart #重启服务器 ./lsnrctl start #重启监听器 ----------------------------------- 方法2: (1) 以oracle身份登录数据库&am…...

AssetBundleBrowser导入报错解决方案
第一次导入AssetBundleBrowser遇到报错有 Assets\Scenes\AssetBundles-Browser-master\AssetBundles-Browser-master\Tests\Editor\ABModelTests.cs(13,7): error CS0246: The type or namespace name Boo could not be found (are you missing a using directive or an assem…...
vue-baidu-map-3x 使用记录
在 Vue3 TypeScript 项目中,为了采用 标签组件 的方式,使用百度地图组件,冲浪发现了一个开源库 ovo,很方便!喜欢的朋友记得帮 原作者 点下 star ~ vue-baidu-map-3xbaidu-map的vue3/vue2版本(支持v2.0、v…...
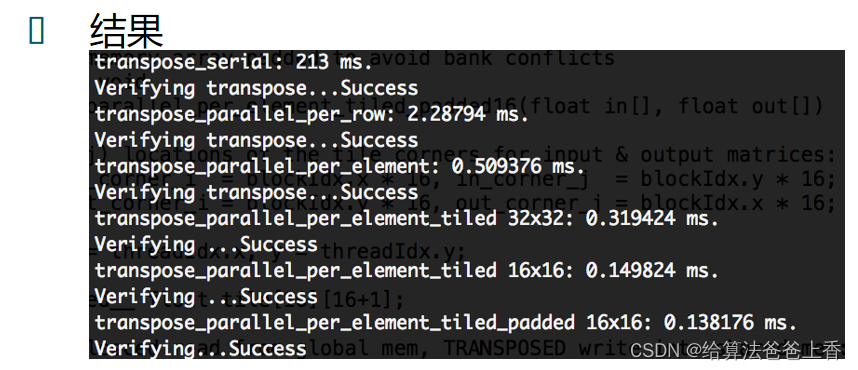
《GPU并行计算与CUDA编程》笔记
第一个GPU程序 #include <stdio.h>__global__ void square(float* d_out,float* d_in){int idx threadIdx.x;float f d_in[idx];d_out[idx] f * f; }int main(int argc,char** argv){const int ARRAY_SIZE 8;const int ARRAY_BYTES ARRAY_SIZE * sizeof(float);// …...
函数)
Shell编程基础(十二)函数
函数 概念定义调用函数综合脚本 概念 和其他编程语言一样,函数作为一种封装代码块,以提高代码复用性和可维护性的存在。 记住一点,先定义,再使用 定义 shell 函数的创建方式 function 函数名 空格{ xxxx return 返回码&#x…...

【雕爷学编程】MicroPython动手做(33)——物联网之天气预报3
天气(自然现象) 是指某一个地区距离地表较近的大气层在短时间内的具体状态。而天气现象则是指发生在大气中的各种自然现象,即某瞬时内大气中各种气象要素(如气温、气压、湿度、风、云、雾、雨、闪、雪、霜、雷、雹、霾等ÿ…...

Screens 4 for mac VNC客户端 强大的远程控制工具
Screens 4 for Mac 是一款功能强大的 VNC 客户端软件,为 Mac 用户提供了便捷的远程访问和控制解决方案。无论您是需要远程管理服务器、办公电脑,还是需要远程协助他人解决问题,Screens 4 都是您的理想选择。 Screens 4 for Mac具备简洁直观的…...
)
搜索与图论(三)
一、最小生成树 1.1Prim算法 朴素版Prim 一般用于稠密图 算法流程: 集合表示当前已经在连通块的点 1.初始化距离,把所有距离都初始化为正无穷 2.n次迭代,找到集合外距离最小的点 ->t 3.用t来更新其它点到集合的距离 #include<iostream> #include&…...

阿里云“通义千问”开源,可免费商用
我是卢松松,点点上面的头像,欢迎关注我哦! 阿里云成为国内首个加入大模型开源行列的大型科技企业。就在昨天,阿里云公开表态,把自家的通义千问大模型开源。 阿里云把通用70亿参数模型,包括Qwen-7B和对话模…...

23.7.31 牛客暑期多校5部分题解
E - Red and Blue and Green 题目大意 构造一个长度为 n n n 的序列,满足 m m m 个条件,每个条件包含三个数 l , r , w l,\space r,\space w l, r, w,表示区间左端点,区间右端点,这个区间的逆序对数的奇偶性&…...
Python爬虫的学习day02 requests 模块post 函数, lmxl 模块的 etree 模块
1. requests 模块post 函数 1.1 post 函数的参数 (简单版) 参数1: url 网络地址 参数2: data 请求数据 (一般数据是 账号,密码) 参数3: headers 头请求 (…...
客户流失分析预测案例 -- 机器学习项目基础篇(7)
客户流失 它是指现有的客户、用户、订阅者或任何类型的回头客停止与公司开展业务或结束与公司的关系。 客户流失的类型 合同客户流失:当客户签订了服务合同并决定取消服务时,例如有线电视,SaaS。自愿流失:当用户自愿取消服务时…...

uniapp中我使用uni.navigateTo跳转webview页面传参,但是接收的参数只有一半。
在uniapp中使用uni.navigateTo跳转webview页面传参时,可能会遇到接收的参数只有一半的情况。这可能是因为在跳转时,url的长度超过了限制。为了解决这个问题,可以使用encodeURIComponent和decodeURIComponent进行编码和解码。 具体的解决办法…...

使用kaminari,在列表页实现分页功能
安装 1. bundller 大于1的话,可以使用这个版本 gem install kaminari -v 0.16.3 或者 gem kaminari 2. 使用命令: $ bundle install 3. 然后使用这个命令可以创建一个config文件 $ rails g kaminari:config 4. 重新启动服务器 bundle exec rail…...

Android 性能调优之bitmap的优化
背景 Android开发中,加载图片过多、过大很容易引起OutOfMemoryError异常,即我们常见的内存溢出。因为Android对单个应用施加内存限制,默认分配的内存只有几M(具体视不同系统而定)。而载入的图片如果是JPG之类的压缩格…...

DayZCommunityOfflineMode:构建专属末日世界的完整解决方案
DayZCommunityOfflineMode:构建专属末日世界的完整解决方案 【免费下载链接】DayZCommunityOfflineMode A community made offline mod for DayZ Standalone 项目地址: https://gitcode.com/gh_mirrors/da/DayZCommunityOfflineMode DayZCommunityOfflineMod…...

FPGA与Jetson异构计算:破解机器视觉高带宽实时处理难题
1. 项目概述:当FPGA遇上Jetson,一台为视觉而生的“小钢炮”在机器视觉和工业检测这个行当里干了十几年,我经手过不少号称“高性能”的嵌入式系统。它们要么是体积硕大、功耗惊人的工控机,要么是接口单一、扩展性堪忧的嵌入式板卡。…...

10分钟快速入门:免费开源AI语音转换与音频分离完整指南
10分钟快速入门:免费开源AI语音转换与音频分离完整指南 【免费下载链接】Retrieval-based-Voice-Conversion-WebUI Easily train a good VC model with voice data < 10 mins! 项目地址: https://gitcode.com/GitHub_Trending/re/Retrieval-based-Voice-Conver…...

IPXWrapper终极指南:让90年代经典游戏在现代Windows上重生联机对战
IPXWrapper终极指南:让90年代经典游戏在现代Windows上重生联机对战 【免费下载链接】ipxwrapper 项目地址: https://gitcode.com/gh_mirrors/ip/ipxwrapper 对于许多怀旧游戏玩家来说,最大的遗憾莫过于那些经典的《星际争霸》、《帝国时代》、《…...

联想笔记本BIOS隐藏设置解锁工具:专业指南与深度解析
联想笔记本BIOS隐藏设置解锁工具:专业指南与深度解析 【免费下载链接】LEGION_Y7000Series_Insyde_Advanced_Settings_Tools 支持一键修改 Insyde BIOS 隐藏选项的小工具,例如关闭CFG LOCK、修改DVMT等等 项目地址: https://gitcode.com/gh_mirrors/le…...

sleek开发者指南:基于Electron+React的现代桌面应用架构
sleek开发者指南:基于ElectronReact的现代桌面应用架构 【免费下载链接】sleek todo.txt manager for Linux, Windows and MacOS, free and open-source (FOSS) 项目地址: https://gitcode.com/gh_mirrors/sl/sleek sleek是一款跨平台的todo.txt管理器&#…...

别再手动拼接数据了!用ONNXRuntime和TensorRT实现多Batch推理的Python/C++实战对比
多Batch推理实战:ONNXRuntime与TensorRT的高效对决 在计算机视觉项目的实际部署中,我们常常会遇到这样的场景:摄像头持续采集图像,或者需要同时处理来自多个传感器的数据。如果每次只处理单张图片,就像用吸管喝一大桶…...

Fast-GitHub架构解析:基于Manifest V3的浏览器扩展网络加速方案
Fast-GitHub架构解析:基于Manifest V3的浏览器扩展网络加速方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 技术架…...

仅限内部团队使用的Perplexity航班缓存穿透防护策略——含Redis布隆过滤器+航班时刻表TTL动态算法
更多请点击: https://intelliparadigm.com 第一章:Perplexity航班信息查询 Perplexity 是一款以实时网络检索与引用驱动为特色的 AI 智能问答工具,其在航空旅行场景中可高效辅助用户获取最新、最准确的航班动态。不同于传统静态知识库模型&a…...

照片直播如何实现?Android 通过 PTP/MTP 有线连接相机的技术方案
一、应用场景 在婚礼摄影、赛事记录、电商拍摄等业务中,客户往往希望: 摄影师按下快门,手机或平板立刻能看到照片。 常见传输方式的对比: 方式 问题 WiFi 延迟高、断连频繁 蓝牙 传输速度慢 有线 OTG ✅ 稳定、实时、低…...