FFmpeg中AVIOContext的使用
通过FFmpeg对视频进行编解码时,如果输入文件存在本机或通过USB摄像头、笔记本内置摄像头获取数据时,可通过avformat_open_input接口中的第二个参数直接指定即可。但如果待处理的视频数据存在于内存块中时,该如何指定,可通过FFmpeg中的结构体AVIOContext实现,此时avformat_open_input中的第二个参数传nullptr。
涉及到FFmpeg中的主要函数是avio_alloc_context,声明如下:
AVIOContext *avio_alloc_context(unsigned char *buffer,int buffer_size,int write_flag,void *opaque,int (*read_packet)(void *opaque, uint8_t *buf, int buf_size),int (*write_packet)(void *opaque, uint8_t *buf, int buf_size),int64_t (*seek)(void *opaque, int64_t offset, int whence)) (1).buffer:通过AVIOContext进行输入/输出操作的内存块,由av_malloc分配,av_free释放。av_read_frame会持续从此处取数据。
(2).buffer_size: 内存块大小。
(3).write_flag: 如果buffer作为输出即写入则为1(FFmpeg将处理后的数据写入buffer),如果buffer作为输入则设置为0(FFmpeg从buffer获取数据).
(4).opaque: 指向用户特定数据的不透明指针。
(5).read_packet: 回调函数,当buffer作为输入时必须指定,否则可为nullptr。此回调函数的参数依次为avio_alloc_context中的opaque、buffer、buffer_size。
(6).write_packet:回调函数,当buffer作为输出时必须指定,否则可为nullptr。此回调函数的参数依次为avio_alloc_context中的opaque、buffer、buffer_size。
(7).seek:回调函数,用于查找指定字节位置的函数,可为nullptr。
调用完此接口后,需要将此接口返回的指针赋值给AVFormatContext的pb即I/O context。
以下为测试代码段:
(1).主线程用于实时显示内存块内容。另有一个单独线程用于创建数据。这里使用队列:线程set_packet持续向队列中push数据;回调函数read_packet持续从队列中pop数据
typedef struct Buffer {unsigned char* data;unsigned int length;
} Buffer;class BufferQueue {
public:BufferQueue() = default;~BufferQueue() {}void push(Buffer& buffer) {std::unique_lock<std::mutex> lck(mtx);queue.push(buffer);cv.notify_all();}void pop(Buffer& buffer) {std::unique_lock<std::mutex> lck(mtx);while (queue.empty()) {cv.wait(lck);}buffer = queue.front();queue.pop();}unsigned int size() {return queue.size();}private:std::queue<Buffer> queue;std::mutex mtx;std::condition_variable cv;
};class PacketScaleQueue {
public:PacketScaleQueue() = default;~PacketScaleQueue() {Buffer buffer;while (getPacketSize() > 0) {popPacket(buffer);delete[] buffer.data;}while (getScaleSize() > 0) {popScale(buffer);delete[] buffer.data;}}void init(unsigned int buffer_num = 16, unsigned int buffer_size = 1024 * 1024 * 4) {for (unsigned int i = 0; i < buffer_num; ++i) {Buffer buffer = { new unsigned char[buffer_size], buffer_num};pushPacket(buffer);}}void pushPacket(Buffer& buffer) { packet_queue.push(buffer); }void popPacket(Buffer& buffer) { packet_queue.pop(buffer); }unsigned int getPacketSize() { return packet_queue.size(); }void pushScale(Buffer& buffer) { scale_queue.push(buffer); }void popScale(Buffer& buffer) { scale_queue.pop(buffer); }unsigned int getScaleSize() { return scale_queue.size(); }private:BufferQueue packet_queue, scale_queue;
};(2).线程函数set_packet内容如下:类PacketScaleQueue中有两个BufferQueue: packet_queue:未被使用的;scale_queue:已被使用的
void set_packet(PacketScaleQueue& packet_encode)
{while (packet_encode_flag) {static unsigned char v1 = 0, v2 = 0, v3 = 255;static const size_t size = height * width;Buffer buffer;packet_encode.popPacket(buffer);memset(buffer.data, v1, size);memset(buffer.data + size, v2, size);memset(buffer.data + size * 2, v3, size);packet_encode.pushScale(buffer);++v1;++v2;--v3;if (v1 == 255) v1 = 0;if (v2 == 255) v2 = 0;if (v3 == 0) v3 = 255;std::this_thread::sleep_for(std::chrono::milliseconds(40));}
}(3).回调函数read_packet内容如下:
int read_packet(void* opaque, uint8_t* buf, int buf_size)
{PacketScaleQueue* packet_encode = static_cast<PacketScaleQueue*>(opaque);Buffer buffer;packet_encode->popScale(buffer);memcpy(buf, buffer.data, buf_size);packet_encode->pushPacket(buffer);return buf_size;
}(4).主函数test_ffmpeg_avio_show内容如下:
int test_ffmpeg_avio_show()
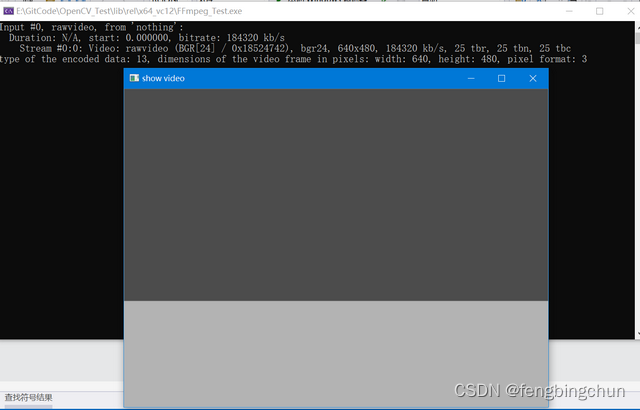
{PacketScaleQueue packet_encode;packet_encode.init(30, block_size);std::thread thread_packet(set_packet, std::ref(packet_encode));uint8_t* avio_ctx_buffer = static_cast<uint8_t*>(av_malloc(block_size));if (!avio_ctx_buffer) {print_error_string(AVERROR(ENOMEM));return -1;}AVIOContext* avio_ctx = avio_alloc_context(avio_ctx_buffer, block_size, 0, &packet_encode, &read_packet, nullptr, nullptr);if (!avio_ctx) {print_error_string(AVERROR(ENOMEM));return -1;}AVFormatContext* ifmt_ctx = avformat_alloc_context();if (!ifmt_ctx) {print_error_string(AVERROR(ENOMEM));return -1;}ifmt_ctx->pb = avio_ctx;AVDictionary* dict = nullptr;av_dict_set(&dict, "video_size", "640x480", 0);av_dict_set(&dict, "pixel_format", "bgr24", 0);auto ret = avformat_open_input(&ifmt_ctx, nullptr, av_find_input_format("rawvideo"), &dict);if (ret < 0) {fprintf(stderr, "Could not open input\n");print_error_string(ret);return ret;}ret = avformat_find_stream_info(ifmt_ctx, nullptr);if (ret < 0) {fprintf(stderr, "Could not find stream information\n");print_error_string(ret);return ret;}av_dump_format(ifmt_ctx, 0, "nothing", 0);int video_stream_index = -1;for (unsigned int i = 0; i < ifmt_ctx->nb_streams; ++i) {const AVStream* stream = ifmt_ctx->streams[i];if (stream->codecpar->codec_type == AVMEDIA_TYPE_VIDEO) {video_stream_index = i;fprintf(stdout, "type of the encoded data: %d, dimensions of the video frame in pixels: width: %d, height: %d, pixel format: %d\n",stream->codecpar->codec_id, stream->codecpar->width, stream->codecpar->height, stream->codecpar->format);}}if (video_stream_index == -1) {fprintf(stderr, "error: no video stream\n");return -1;}AVCodecParameters* codecpar = ifmt_ctx->streams[video_stream_index]->codecpar;if (codecpar->codec_id != AV_CODEC_ID_RAWVIDEO) {fprintf(stderr, "error: this test code only support rawvideo encode: %d\n", codecpar->codec_id);return -1;}AVPacket* packet = static_cast<AVPacket*>(av_malloc(sizeof(AVPacket)));if (!packet) {fprintf(stderr, "fail to av_malloc\n");return -1;}cv::Mat mat(height, width, CV_8UC3);const char* winname = "show video";cv::namedWindow(winname);while (1) {ret = av_read_frame(ifmt_ctx, packet);if (ret >= 0 && packet->stream_index == video_stream_index && packet->size > 0) {mat.data = packet->data;cv::imshow(winname, mat);av_packet_unref(packet);int key = cv::waitKey(30);if (key == 27) {packet_encode_flag = false;break;}}}av_freep(packet);cv::destroyWindow(winname);avformat_close_input(&ifmt_ctx);// note: the internal buffer could have changed, and be != avio_ctx_bufferif (avio_ctx) {av_freep(&avio_ctx->buffer);av_freep(&avio_ctx);}//avio_context_free(&avio_ctx); ==> av_freep(&avio_ctx);av_dict_free(&dict);thread_packet.join();fprintf(stdout, "test finish\n");return 0;
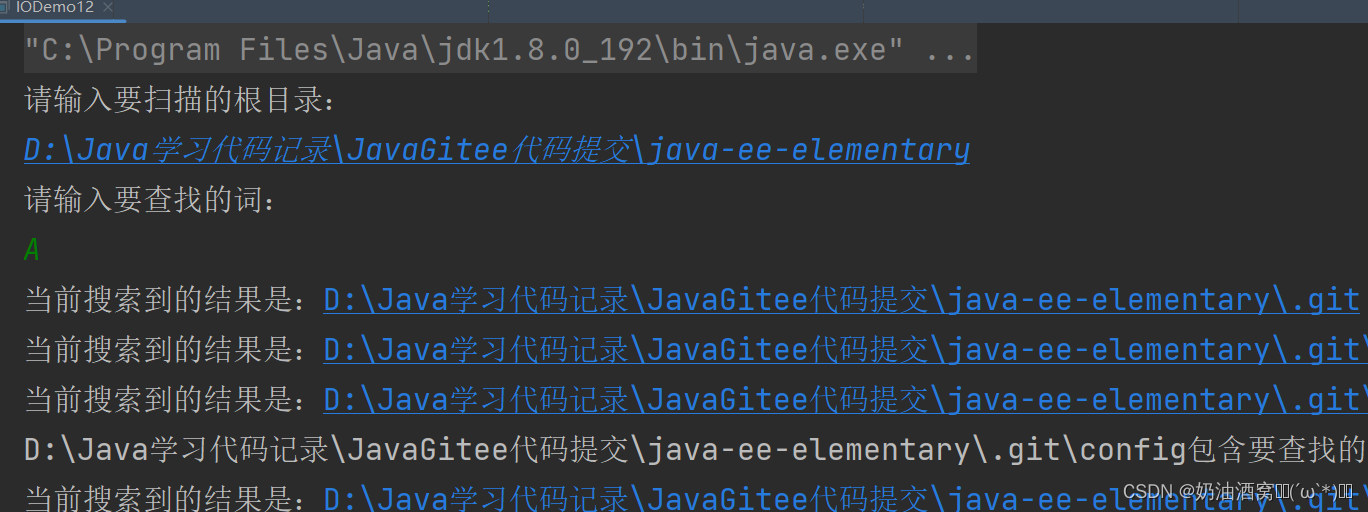
}执行结果如下图所示:
GitHub:https://github.com/fengbingchun/OpenCV_Test
相关文章:
FFmpeg中AVIOContext的使用
通过FFmpeg对视频进行编解码时,如果输入文件存在本机或通过USB摄像头、笔记本内置摄像头获取数据时,可通过avformat_open_input接口中的第二个参数直接指定即可。但如果待处理的视频数据存在于内存块中时,该如何指定,可通过FFmpeg…...
【react】react中BrowserRouter和HashRouter的区别:
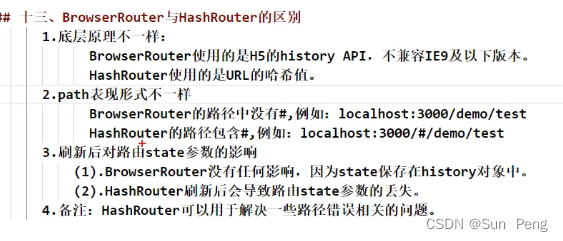
文章目录 1.底层原理不一样:2.path衣现形式不一样3.刷新后对路山state参数的影响4.备注: HashRouter可以用于解决一些路径错误相关的问题 1.底层原理不一样: BrowserRouter使用的是H5的history API,不兼容IE9及以下版不。 HashRouter使用的是URL的哈希值。 2.path衣…...
机器学习常用Python库安装
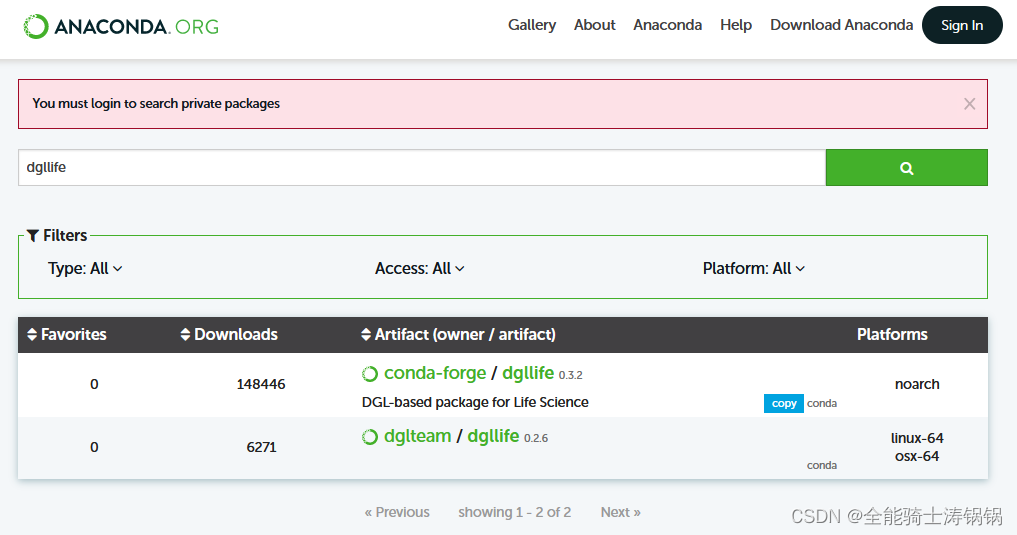
机器学习常用Python库安装 作者日期版本说明Dog Tao2022.06.16V1.0开始建立文档 文章目录 机器学习常用Python库安装Anaconda简介使用镜像源配置 Pip简介镜像源配置 CUDAPytorch安装旧版本 TensorFlowGPU支持说明 DGL简介安装DGLLife RDKitscikit-multilearn Anaconda 简介 …...

HTTP 劫持、DNS 劫持与 XSS
HTTP 劫持、DNS 劫持与 XSS http 劫持是指攻击者在客户端和服务器之间同时建立了连接通道,通过某种方式,让客户端请求发送到自己的服务器,然后自己就拥有了控制响应内容的能力,从而给客户端展示错误的信息,比如在页面中…...

bash引用-Quoting详细介绍
bash引用-Quoting详细介绍 概述 引用的字面意思就是,用引号括住一个字符串。这可以保护字符串中的特殊字符不被shell或shell脚本重新解释或扩展。(如果一个字有不同于其字面意思的解释,它就是“特殊的”。例如:星号*除了本身代表*号以外还表…...
powershell几句话设置环境变量
设置环境变量比较繁琐,现在用这段话,在powershell中就可以轻松完成。 $existingPath [Environment]::GetEnvironmentVariable("Path", "Machine") $newPath "C:\Your\Path\Here"if ($existingPath -split ";"…...

Javascript 数据结构[入门]
作者:20岁爱吃必胜客(坤制作人),近十年开发经验, 跨域学习者,目前于海外某世界知名高校就读计算机相关专业。荣誉:阿里云博客专家认证、腾讯开发者社区优质创作者,在CTF省赛校赛多次取得好成绩。…...
IO(JavaEE初阶系列8)
目录 前言: 1.文件 1.1认识文件 1.2结构和目录 1.3文件路径 1.4文本文件vs二进制文件 2.文件系统的操作 2.1Java中操作文件 2.2File概述 2.2.1构造File对象 2.2.2File中的一些方法 3.文件内容的操作 3.1字节流 3.1.1InPutStream的使用方法 3.1.2OutPu…...

React Native 样式表的基础知识
在 React Native 中我们要使用组件元素进行样式设置的话,我们需要使用StyleSheet组件才能制定样式。useColorScheme是为 APP 定义颜色主题的。在此笔记中我们只是简单做一个介绍和使用。 使用StyleSheet定义样式 当我们要使用StyleSheet的话,我们需要引…...

【JS 解构赋值】
JS 解构赋值是 ES6 中一种简洁、高效的赋值方式,它可以将数组和对象中的值拆分出来并赋值给变量。 解构赋值 解构数组解构对象嵌套解构结语 解构数组 解构数组时,需要使用方括号 [] 包围变量名,并用逗号 , 将变量名隔开。 let [a, b, c] …...

Vue3状态管理库Pinia——自定义持久化插件
个人简介 👀个人主页: 前端杂货铺 🙋♂️学习方向: 主攻前端方向,正逐渐往全干发展 📃个人状态: 研发工程师,现效力于中国工业软件事业 🚀人生格言: 积跬步…...
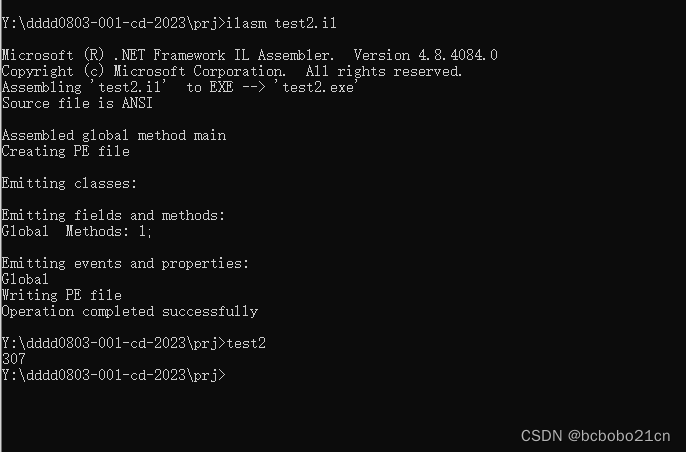
il汇编整数相加
在这里尝试了IL汇编字符串连接; IL汇编字符串连接_bcbobo21cn的博客-CSDN博客 下面来看一下IL汇编整数相加; 大概的看一下一些资料,下面语句, ldc.i4 20 ldc.i4 30 add 看上去像是,装载整数20到一个类似于…...

RabbitMQ 事务
事务简介 就像我们了解的MySQL中的事务一样,RabbiMQ的事务也具备原子性和一致性,并且RabbiMQ的事务是针对消息从生产者发送到RabbitMQ中提供的支持,因此不同事务可以同时给同一个队列发送信息。 可通过channel.txSelect,chann…...

vue前端 让年月日 加上23:59:59
yyyy/MM/dd HH:mm:ss 格式 // 获取 lateCreateTime 的原始时间戳 const timestamp new Date(this.queryAO.lateCreateTime).getTime();// 将时间戳转换为指定格式的字符串 const formattedDateTime new Date(timestamp).toLocaleString("zh-CN", {year: "num…...
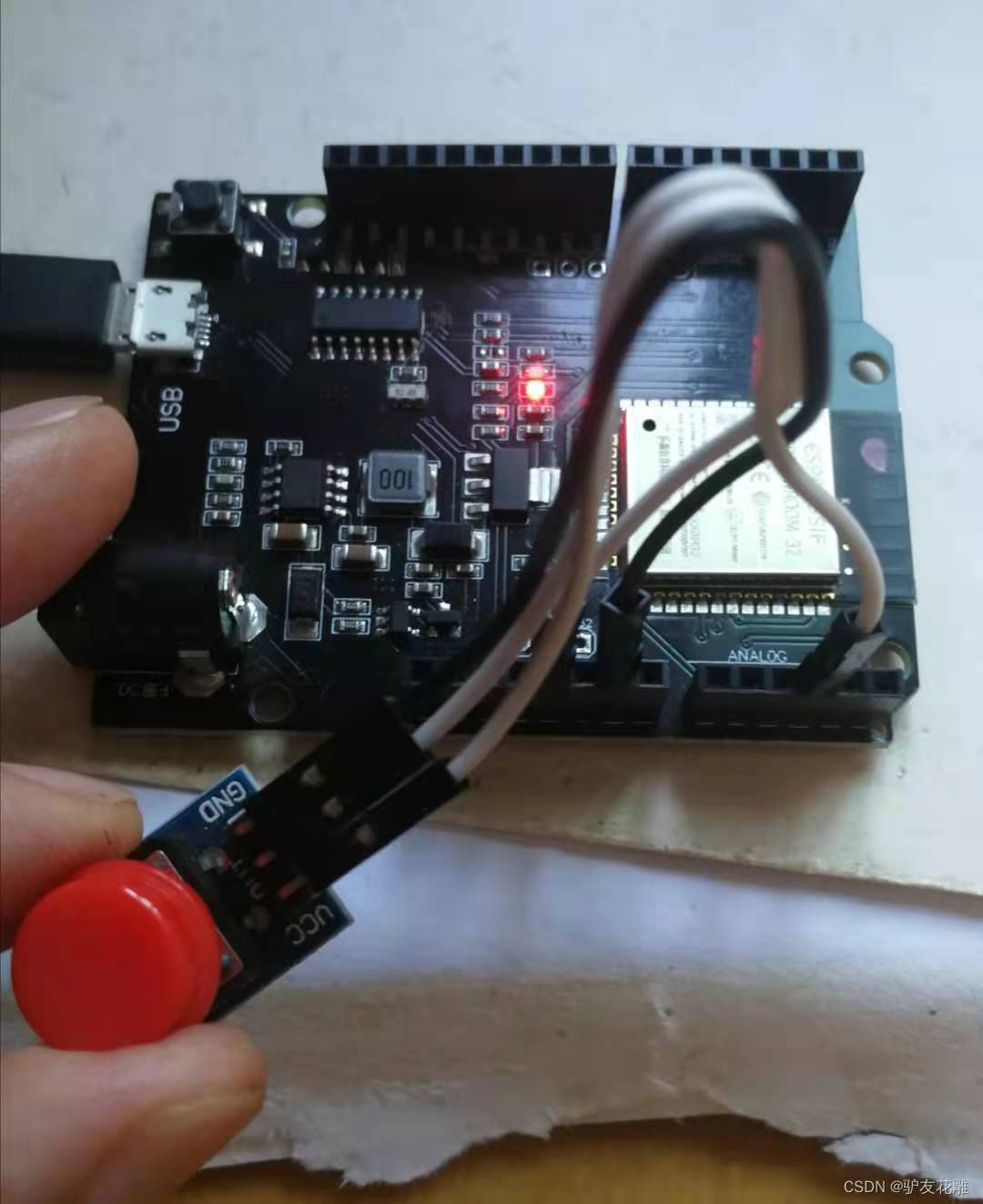
【雕爷学编程】Arduino动手做(186)---WeMos ESP32开发板8
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的&#x…...
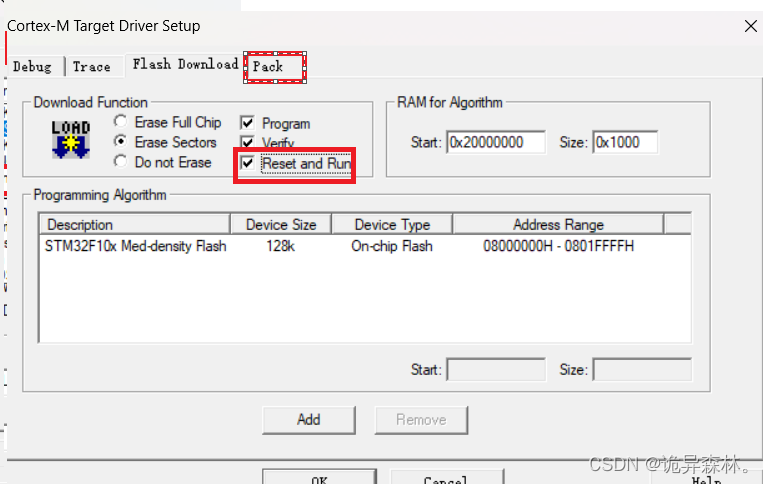
STM32--综述
文章目录 前言STM32简介STM32F103C8T6系统结构Keil软件安装注意事项新建工程操作流程 前言 本专栏将学习B站江协科技的STM32入门教程,通过自身理解和对老师的总结所写的博客专栏。 STM32简介 STM32是意法半导体(STMicroelectronics)公司推…...

Linux学习之sed、awk和vim的差异
sed、awk和vim都是编辑器,区别如下: vim是交互式,需要跟用户进行互动,而sed和awk是非交互式,只需要写好命令,不用跟用户进行互动就可以完成任务。 vim是文本编辑器,操作的时候会对整个文件编辑&…...
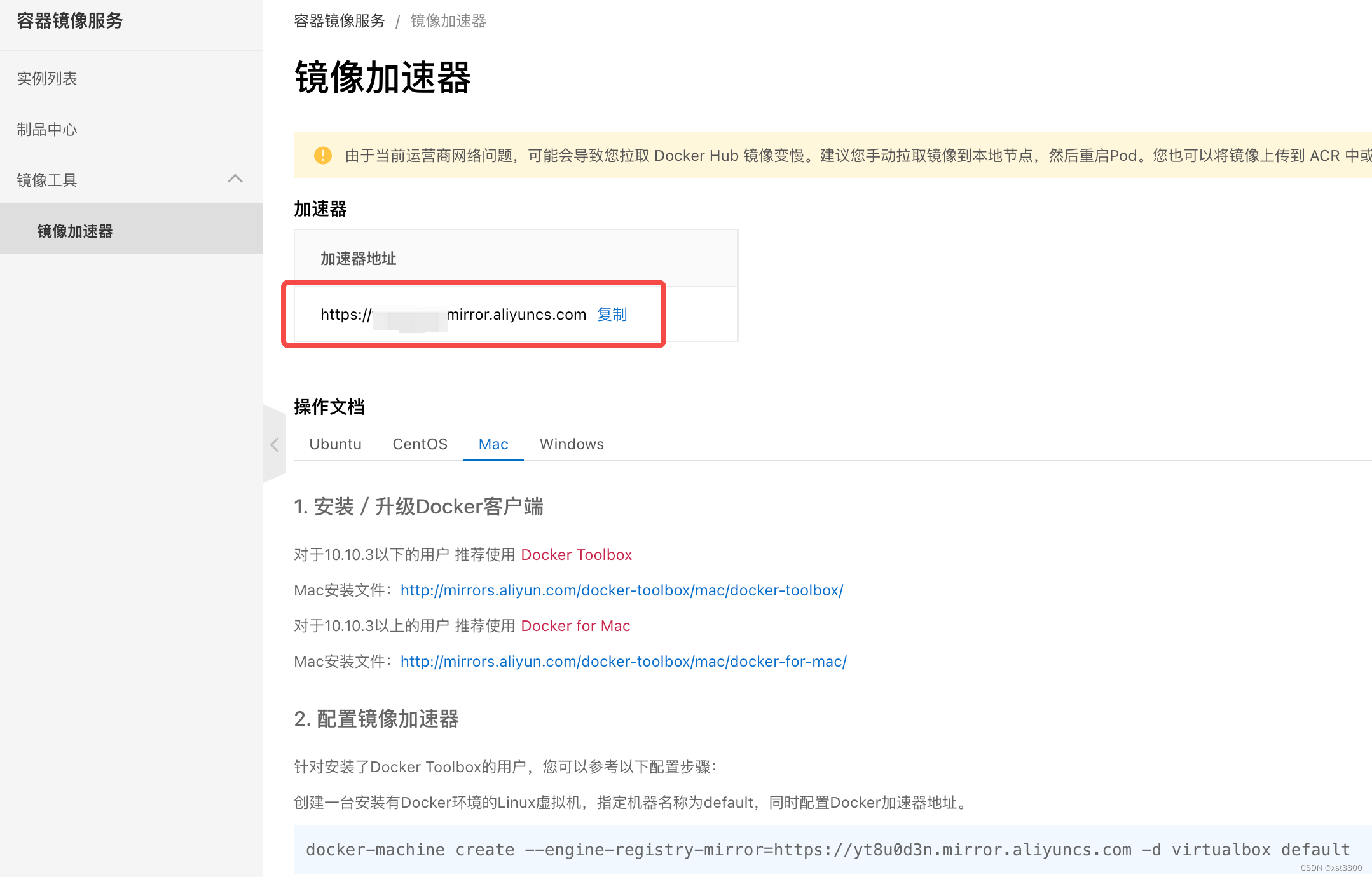
MacOS上配置docker国内镜像仓库地址
背景 docker官方镜像仓库网速较差,我们需要设置国内镜像服务 我的MacOS docker版本如下 设置docker国内镜像仓库地址 点击Settings点击Docker Engine修改配置文件,添加registry-mirrors {"builder": {"gc": {"defaultKeepS…...
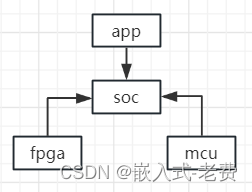
全志F1C200S嵌入式驱动开发(soc系统集成)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 任何一个嵌入式设备都是由很多的子系统组成的。这里面有硬件、有软件,还可能有机械,并不一定就是大家看到的消费电子那样,即一个soc构成了所有的系统。现实情况是,要构建一个系…...

React路由5版本
什么是路由? 一个路由就是一个映射关系(key:value). 以下代码用的都是router5 通过 npm install react-router-dom5 下载 所有路由用到的东西都需要从react-router-dom中引入 import {BrowserRouter,Link,Route,NavLink,Redirect,withRouter} from react-router-dom 1. 路…...

Zotero插件市场:三步快速上手的插件管理神器
Zotero插件市场:三步快速上手的插件管理神器 【免费下载链接】zotero-addons Zotero Add-on Market | Zotero插件市场 | Browsing, installing, and reviewing plugins within Zotero 项目地址: https://gitcode.com/gh_mirrors/zo/zotero-addons 想象一下&a…...

基于MCP协议的AI Agent远程SSH安全操作实践指南
1. 项目概述与核心价值最近在折腾AI Agent的开发,发现一个挺有意思的现象:很多开发者都卡在了“如何让AI安全、可控地操作远程服务器”这一步。你可能会想到直接给AI一个SSH私钥,但这无异于把自家大门的钥匙扔给一个还在学习走路的机器人&…...

基于RAG的Obsidian智能插件:用AI对话重塑个人知识管理
1. 项目概述:当笔记遇上AI,一个插件如何重塑知识管理最近在折腾我的Obsidian知识库时,发现了一个让我眼前一亮的插件:Smart2Brain。这名字起得挺有意思,“Smart to Brain”,直译过来就是“从智能到大脑”。…...

如何3分钟快速上手企业级后台管理系统:终极配置秘籍
如何3分钟快速上手企业级后台管理系统:终极配置秘籍 【免费下载链接】ant-design-vue3-admin 一个基于 Vite2 Vue3 Typescript tsx Ant Design Vue 的后台管理系统模板,支持响应式布局,在 PC、平板和手机上均可使用 项目地址: https://…...

基于MCP协议构建AI数据连接器:从原理到SQL查询服务器实践
1. 项目概述:一个连接AI与数据源的“翻译官”最近在折腾AI应用开发,特别是想让大语言模型(LLM)能直接、安全地访问我自己的数据库、API或者文件系统时,遇到了一个普遍难题:怎么让AI理解并操作这些外部数据源…...

基于CircuitPython与加速度计的魔法9号球:嵌入式交互项目实践
1. 项目概述:当硬件遇上玄学,用代码打造你的专属“决策神器”在嵌入式开发的世界里,我们常常与传感器、显示屏和逻辑代码打交道,构建着一个个解决实际问题的智能设备。但谁说硬件项目就一定要严肃刻板?今天,…...
)
多语种出海必备,ElevenLabs菲律宾文语音质量实测对比:Wavenet vs. Instant Voice vs. Custom Model(附MOS评分表)
更多请点击: https://intelliparadigm.com 第一章:多语种出海语音技术演进与菲律宾语本地化挑战 随着全球数字服务加速出海,语音交互系统正从单语种向多语种、低资源语言深度拓展。菲律宾语(Filipino/Tagalog)作为东…...

AI智能体开发实战:从Devin现象到代码辅助智能体构建
1. 项目概述:当开发者遇上AI智能体最近在GitHub上闲逛,发现一个叫“awesome-devins”的仓库热度飙升。点进去一看,好家伙,这简直是一个关于“AI智能体”的宝藏目录。这个由e2b-dev团队维护的项目,本质上是一个精心整理…...

基于Python/Flask的洗车店业务管理系统设计与实现
1. 项目概述:从“洗车”到“洗车服务”的数字化重构最近在GitHub上看到一个挺有意思的项目,叫“washing-cars”。光看名字,你可能会觉得这只是一个关于洗车的小工具或者记录表。但当我深入进去,才发现它远不止于此。这个项目本质上…...

RTX 5090功耗600W:高功耗显卡的系统级挑战与实战装机指南
1. 项目概述:从一则功耗新闻到显卡生态的深度解构最近,一则关于英伟达下一代旗舰显卡RTX 5090功耗可能高达600W的消息,在硬件圈和AI计算领域激起了不小的波澜。对于普通玩家而言,这或许只是一个“电老虎”又升级了的谈资ÿ…...