C++中点云聚类算法的实现与应用探索
第一部分:C++中点云聚类算法的实现与应用
在当今的计算机视觉领域,点云数据是一种重要的三维数据类型,它能有效表达三维物体的形状信息。然而,由于点云数据的无序性和稀疏性,对其进行分析与处理的难度较大。本文将介绍如何在C++环境中实现点云聚类算法,并给出具体的示例代码。
一、点云聚类算法简介
点云聚类算法的目标是将一个点云数据集划分为多个子集,使得每个子集中的点在空间上是连续的,而不同子集之间的点在空间上是分离的。这个过程类似于对二维数据进行聚类,但是由于点云数据的三维性质,使得其聚类过程更为复杂和挑战性。
常用的点云聚类算法主要有基于密度的聚类算法(DBSCAN)、基于网格的聚类算法(GRAC)以及基于图的聚类算法。本文将以DBSCAN算法为例,详细介绍如何在C++中实现点云聚类。
二、密度聚类算法DBSCAN的C++实现
DBSCAN (Density-Based Spatial Clustering of Applications with Noise),即密度可达空间应用的噪声聚类,是一种经典的密度聚类算法。DBSCAN以某一点为中心,当在指定半径ε内的邻域中点的数量超过一定阈值MinPts时,就会形成一个新的聚类。
2.1 DBSCAN算法步骤
DBSCAN算法的主要步骤如下:
- 随机选择一个尚未被访问的点P。
- 创建一个新的空队列Q,并将点P添加到Q中。
- 当Q不为空时,从Q中取出一个点N。
- 如果N的ε-邻域中的点的数量大于MinPts,则将这些点添加到Q中,并且将这些点和N添加到同一个聚类中。
- 重复步骤3,直到Q为空。
- 如果还存在尚未被访问的点,则回到步骤1。
2.2 DBSCAN的C++代码实现
下面是DBSCAN算法的C++代码实现的部分示例:
#include <vector>
#include <queue>
#include "PointCloud.h"
#include "DBSCAN.h"DBSCAN::DBSCAN(double eps, int minPts) : eps(eps), minPts(minPts) {}void DBSCAN::fit(PointCloud& pc) {std::vector<bool> visited(pc.size(), false);int cluster = 0;for (int i = 0; i < pc.size(); ++i) {if (!visited[i]) {std::queue<int> q;q.push(i);visited[i] = true;while (!q.empty()) {int idx = q.front();q.pop();std::vector<int> neighbors = pc.rangeQuery(idx, eps);if (neighbors.size() >= minPts) {for (int n : neighbors) {if (!visited[n]) {q.push(n);visited[n] = true;}}pc[idx].cluster = cluster;}}++cluster;}}
}
上述代码中,我们首先定义了一个DBSCAN类,该类有两个参数:ε和MinPts。然后在fit函数中,我们实现了DBSCAN算法的主要步骤。我们使用一个队列q来存储待处理的点,使用一个布尔值数组visited来记录每个点是否已被访问,使用一个整数cluster来表示当前的聚类编号。
第二部分:优化DBSCAN实现和点云聚类的应用
在上一部分,我们已经实现了基本的DBSCAN算法。然而,在实际应用中,我们可能需要处理的点云数据规模非常大,因此需要对我们的实现进行优化,以提高其运行效率。
三、优化DBSCAN实现
在我们的DBSCAN实现中,最耗时的部分是对每个点进行ε-邻域查询。为了提高查询效率,我们可以使用空间索引数据结构,如kd-tree或R-tree。这些数据结构可以在对数时间内完成邻域查询,大大提高了查询效率。
下面是使用kd-tree进行邻域查询的C++代码示例:
#include "KDTree.h"std::vector<int> PointCloud::rangeQuery(int idx, double eps) {KDTree tree(points);return tree.rangeQuery(points[idx], eps);
}
在上述代码中,我们首先创建了一个kd-tree,并将点云中的所有点添加到kd-tree中。然后,我们使用kd-tree的rangeQuery函数进行邻域查询。
完整代码请下载资源。
四、点云聚类的应用
点云聚类在许多领域都有广泛的应用,包括但不限于:
-
物体识别和跟踪:通过对点云进行聚类,我们可以将点云中的各个物体分离出来,从而进行物体识别和跟踪。
-
环境建模:点云聚类可以用于从点云中提取出各种环境特征,如地面、建筑物、树木等,从而进行环境建模。
-
机器人导航:在机器人导航中,点云聚类可以用于障碍物检测和路径规划。
在下一部分,我们将详细介绍如何在物体识别中应用点云聚类。
第三部分:点云聚类在物体识别中的应用
在物体识别任务中,点云聚类是一种常用的预处理步骤,它可以将一个大的点云数据集划分为多个小的子集,每个子集代表一个候选的物体。然后,我们可以对每个子集进行特征提取和分类,从而完成物体识别。
五、点云聚类在物体识别中的应用步骤
点云聚类在物体识别中的应用步骤如下:
-
点云获取:使用深度相机或激光雷达获取点云数据。
-
点云预处理:对点云数据进行滤波和降采样处理,以去除噪声和减少数据量。
-
点云聚类:使用DBSCAN或其他聚类算法对点云进行聚类,将点云划分为多个子集。
-
特征提取:对每个子集进行特征提取,获取其形状、颜色等特征。
-
分类:使用分类器对每个子集进行分类,从而完成物体识别。
六、点云聚类在物体识别中的C++代码示例
下面是点云聚类在物体识别中的C++代码示例:
#include "PointCloud.h"
#include "DBSCAN.h"
#include "FeatureExtractor.h"
#include "Classifier.h"void objectRecognition(PointCloud& pc, DBSCAN& dbscan, FeatureExtractor& fe, Classifier& clf) {// Point cloud clusteringdbscan.fit(pc);// Feature extraction and classificationfor (int i = 0; i < pc.numClusters(); ++i) {PointCloud cluster = pc.getCluster(i);std::vector<double> features = fe.extract(cluster);int label = clf.predict(features);std::cout << "Cluster " << i << ": " << label << std::endl;}
}
在上述代码中,我们首先对点云进行聚类,然后对每个聚类进行特征提取和分类。我们使用了一个特征提取器fe和一个分类器clf,这两个对象可以根据具体的任务进行选择和配置。
完整代码请下载资源。
通过上述步骤,我们可以实现对点云中物体的自动识别。这种方法在许多领域都有广泛的应用,如自动驾驶、机器人视觉、3D建模等。
相关文章:

C++中点云聚类算法的实现与应用探索
第一部分:C中点云聚类算法的实现与应用 在当今的计算机视觉领域,点云数据是一种重要的三维数据类型,它能有效表达三维物体的形状信息。然而,由于点云数据的无序性和稀疏性,对其进行分析与处理的难度较大。本文将介绍如…...

大数据Flink(五十六):Standalone伪分布环境(开发测试)
文章目录 Standalone伪分布环境(开发测试) 一、架构图 二、环境准备 三、下载安装包</...
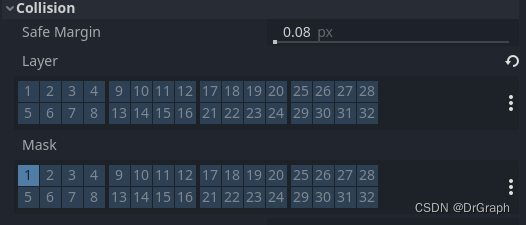
Godot 4 源码分析 - 碰撞
碰撞功能应该是一个核心功能,它能自动产生相应的数据,比如目标对象进入、离开本对象的检测区域。 基于属性设置,能碰撞的都具备这样的属性:Layer、Mask. 在Godot 4中,Collision属性中的Layer和Mask属性是用于定义碰撞…...

前端面试经典算法题
前言 现在面试流行考核算法,做过面试官,也被面试。问算法对面试官来说,是一种解脱,找出了一个看似很高明且能偷懒的办法选择人,避免了不知道问啥的尴尬;被面试者,也找到了一种新的面试八股文&am…...
ospf减少LSA更新
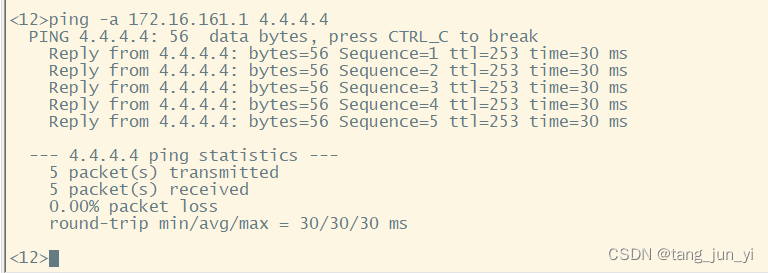
实验及实验要求 一、思路 1.根据区域划分IP地址 2.使公网可通---写缺省 3.使R3成为MGRE中心站点,R5、R6、R7为分支站点 4.一个个去配置ospf区域和RIP区域,确保每个区域配置无误 5.区域0要更改OSPF在接口的工作类型为broadcast ,并使R3为…...
万字长文解析深度学习中的术语
引言 新手在学习深度学习或者在看深度学习论文的过程中,有不少专业词汇,软件翻译不出来,就算是翻译出来也看不懂,因为不少术语是借用其他学科的概念,这里整理了一些在深度学习中常见的术语,并对一些概念进…...

冠达管理投资前瞻:三星加码机器人领域 大信创建设提速
上星期五,沪指高开高走,盘中一度涨超1%打破3300点,但随后涨幅收窄;深成指、创业板指亦强势震动。截至收盘,沪指涨0.23%报3288.08点,深成指涨0.67%报11238.06点,创业板指涨0.95%报2263.37点&…...

24届近5年上海交通大学自动化考研院校分析
今天给大家带来的是上海交通大学控制考研分析 满满干货~还不快快点赞收藏 一、上海交通大学 学校简介 上海交通大学是我国历史最悠久、享誉海内外的高等学府之一,是教育部直属并与上海市共建的全国重点大学。经过120多年的不懈努力,上海交…...
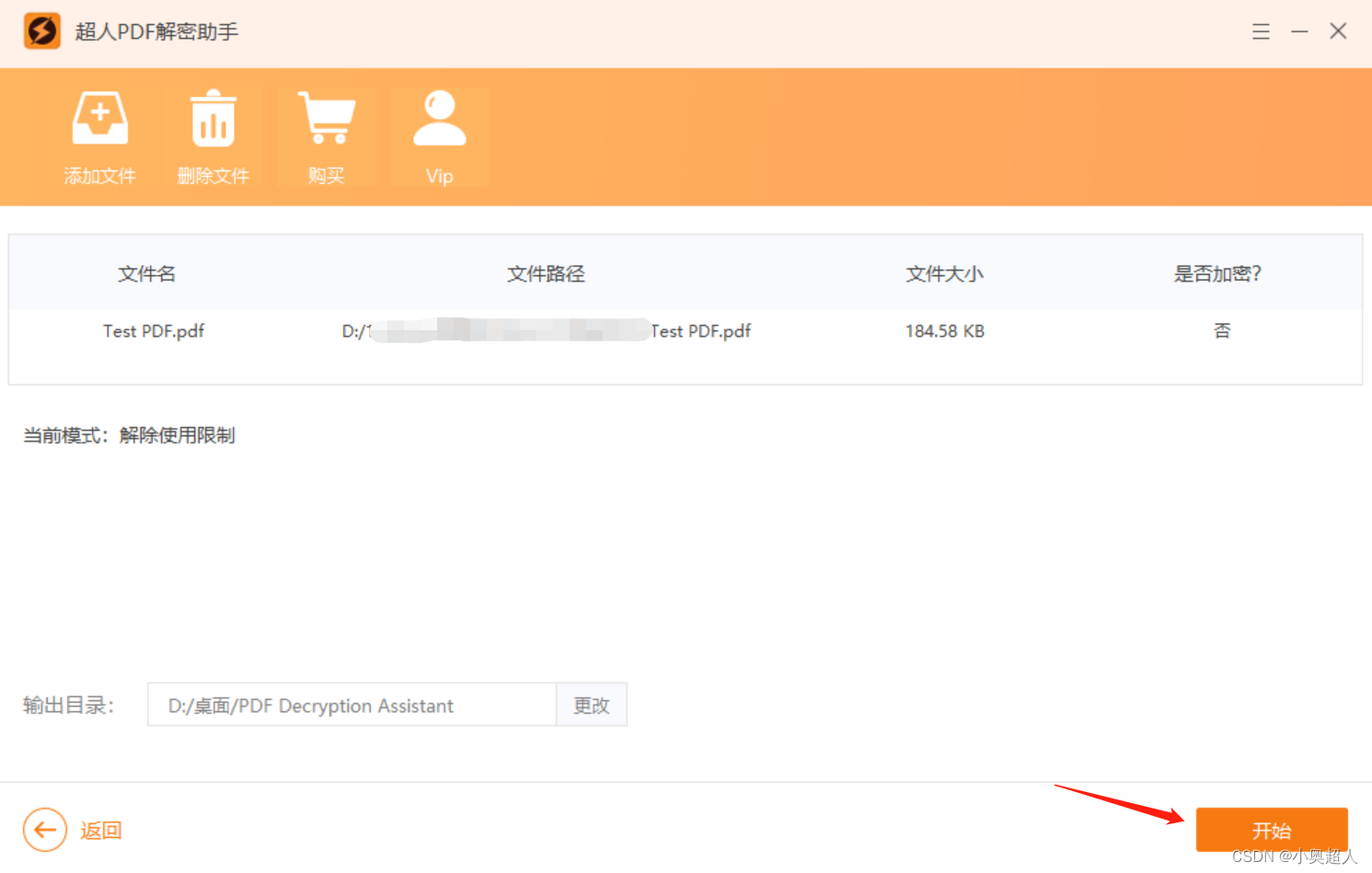
【PDF密码】PDF文件不能打印,为什么?
正常的PDF文件是可以打印的,如果PDF文件打开之后发现文件不能打印,我们需要先查看一下自己的打印机是否能够正常运行,如果打印机是正常的,我们再查看一下,文件中的打印功能按钮是否是灰色的状态。 如果PDF中的大多数功…...
LeetCode-Java(03)
9. 回文数 class Solution {public boolean isPalindrome(int x) {if (x < 0 || (x % 10 0 && x ! 0)) {return false;}int revertedNumber 0;while (x > revertedNumber) {revertedNumber revertedNumber * 10 x % 10;x / 10;}// 当长度为奇数时通过reverte…...

【Linux命令行与Shell脚本编程】第十六章 Shell函数
Linux命令行与Shell脚本编程 第一章 文章目录 Linux命令行与Shell脚本编程六.函数6.1.脚本函数基础6.1.1.创建函数6.1.2.使用函数 6.2.函数返回值6.2.1.默认的退出状态码6.2.2.使用return命令6.2.3.使用函数输出 6.3.函数中使用变量6.3.1.向函数传递参数6.3.2.在函数中处理变量…...
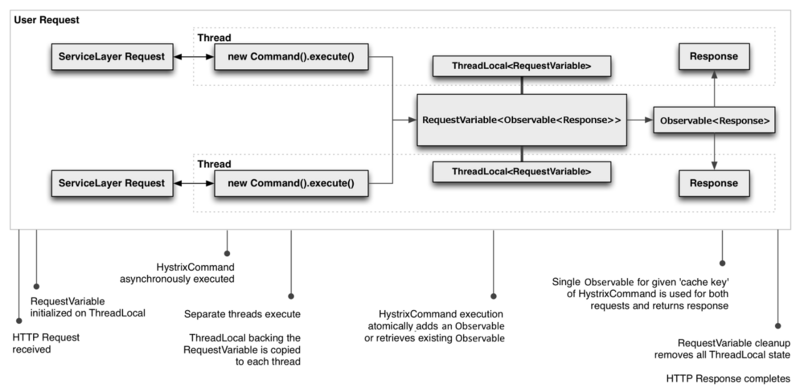
SpringCloud-Hystrix服务熔断与降级工作原理源码 | 京东物流技术团队
先附上Hystrix源码图 在微服务架构中,根据业务来拆分成一个个的服务,服务与服务之间可以相互调用(RPC),在Spring Cloud可以用RestTemplateRibbon和Feign来调用。为了保证其高可用,单个服务通常会集群部署。…...
react脚手架)
(一)react脚手架
1. react脚手架 react提供了一个用于创建react项目的脚手架库:create-react-app 项目的整体技术架构为:react webpack es6 eslint 使用脚手架开发的项目的特点:模块化、组件化、工程化 2. 创建项目并启动 # 第一步: 全局安…...

Typescript中的元组与数组的区别
Typescript中的元组与数组的区别 元组可以应用在经纬度这样明确固定长度和类型的场景下 //元组和数组类似,但是类型注解时会不一样//元组赋值的类型、位置、个数需要和定义的类型、位置、个数完全一致,不然会报错。 // 数组 某个位置的值可以是注解中的…...
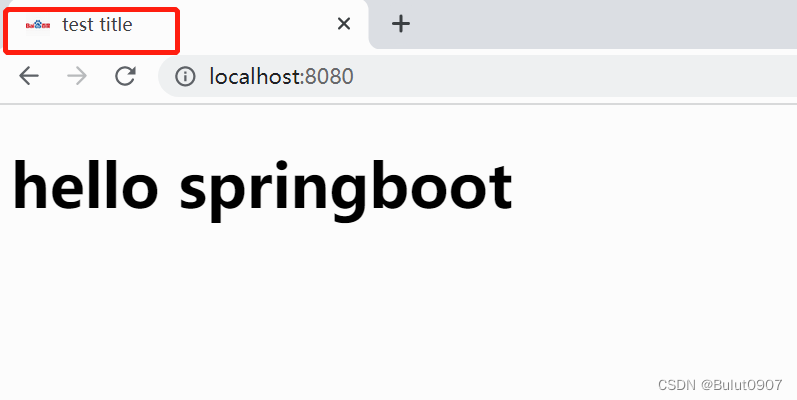
SpringBoot的index首页的访问、自定义Favicon图标
目录 1. index首页1.1 index首页访问规则的源码1.2 index首页的访问 2. 自定义Favicon图标 1. index首页 1.1 index首页访问规则的源码 package org.springframework.boot.autoconfigure.web.servlet; ......省略部分......// SpringBoot给容器中放WebMvcConfigurationSuppor…...

【C++】C++文件操作-文本文件/二进制文件
0.前言 一、文本文件 1.写文件 代码 #include <iostream> using namespace std; #include <fstream> //头文件包含//************************************** //文本文件 写文件 void test01() {//1.包含文件 fstream//2.创建流对象ofstream ofs;//3.指导打开方式…...

java通过http网络url下载文件
Testpublic void test3() throws ParseException {String fileUrl "http://*****/123.pdf";String savePath "C:\\Users\\HHH\\Desktop\\文件\\123.pdf";try {URL url new URL(fileUrl);InputStream inputStream url.openStream();Path outputPath Pa…...
网络安全【黑客】自学
1.什么是网络安全? 网络安全可以基于攻击和防御视角来分类,我们经常听到的 “红队”、“渗透测试” 等就是研究攻击技术,而“蓝队”、“安全运营”、“安全运维”则研究防御技术。 无论网络、Web、移动、桌面、云等哪个领域,都有…...
PCA和自动编码器:每个人都能理解的算法
一、说明 本文的主要重点是提供主成分分析 (PCA) 和自动编码器数据转换技术的直观信息。我不打算深入研究支撑这些模型的数学理论,因为已经有大量的资源可用。 二、pca降维和自编码 2.1 pca和自编码的共同点 自动编码器通过组合数据最重要的特…...

C++——STL容器【priority_queue】模拟实现
本章代码:优先级队列模拟实现、priority_queue文档 文章目录 🐈1. priority_queue介绍🦄2. priority_queue模拟实现🐧2.1 构造函数🐧2.2 建堆向下调整向上调整 🐧2.3 仿函数🐧2.4 push & po…...

观察Taotoken账单明细实现精准成本追溯
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken账单明细实现精准成本追溯 对于使用大模型API的开发者而言,成本控制与优化是项目持续运营的关键。单纯依赖…...

通过TaotokenCLI工具一键配置多开发环境提升团队协作效率
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken CLI工具一键配置多开发环境提升团队协作效率 在团队协作开发中,一个常见的挑战是确保所有成员都能快速、…...

5分钟打造你的桌面股票看板:TrafficMonitor股票插件完整指南
5分钟打造你的桌面股票看板:TrafficMonitor股票插件完整指南 【免费下载链接】TrafficMonitorPlugins 用于TrafficMonitor的插件 项目地址: https://gitcode.com/gh_mirrors/tr/TrafficMonitorPlugins 还在为错过重要股票行情而烦恼吗?想在工作时…...

SleeperX:macOS系统级电源管理架构解析与深度集成方案
SleeperX:macOS系统级电源管理架构解析与深度集成方案 【免费下载链接】SleeperX MacBook prevent idle/lid sleep! Hackintosh sleep on low battery capacity. 项目地址: https://gitcode.com/gh_mirrors/sl/SleeperX 在macOS生态系统中,电源管…...

Audio Slicer:智能音频分割终极指南,告别繁琐手动剪辑
Audio Slicer:智能音频分割终极指南,告别繁琐手动剪辑 【免费下载链接】audio-slicer A simple GUI application that slices audio with silence detection 项目地址: https://gitcode.com/gh_mirrors/aud/audio-slicer 还在为音频剪辑的繁琐操作…...

别再死记硬背二进制转换了!用Python写个自动转换工具,顺便搞懂CPU是怎么算的
用Python打造二进制转换工具:从代码实践理解CPU运算本质 当我们在编程中遇到需要处理二进制数据时,是否曾对背后的计算机原理产生好奇?本文将通过构建一个Python数制转换工具,带你穿透代码表层,深入理解CPU如何处理二…...

Pure Live完整指南:3分钟掌握跨平台纯净直播聚合工具
Pure Live完整指南:3分钟掌握跨平台纯净直播聚合工具 【免费下载链接】pure_live A Flutter project can make you watch live with ease. 项目地址: https://gitcode.com/gh_mirrors/pu/pure_live 在当今数字娱乐时代,直播已成为人们日常娱乐的重…...

PaddleOCR训练集制作避坑指南:从text_renderer合成到roLabelImg标注的全链路解析
PaddleOCR训练集制作全流程实战:从数据合成到模型调优的完整方法论 在工业级OCR项目落地过程中,数据集质量往往比模型架构更能决定最终效果上限。不同于学术界的标准benchmark竞赛,真实业务场景面临字体缺失、背景干扰、版式多变等复杂挑战。…...

如何快速配置ImageGlass:Windows上最轻量的开源图片查看器完整指南
如何快速配置ImageGlass:Windows上最轻量的开源图片查看器完整指南 【免费下载链接】ImageGlass 🏞 A lightweight, versatile image viewer 项目地址: https://gitcode.com/gh_mirrors/im/ImageGlass 还在为Windows自带的图片查看器功能有限而烦…...

X光安检目标识别分割数据集lableme格式2000张5类别
数据集格式:labelme格式(不包含mask文件,仅仅包含jpg图片和对应的json文件)图片数量(jpg文件个数):2000标注数量(json文件个数):2000标注类别数:5标注类别名称:["Electronic Items","Laptop",&quo…...