【3D机甲】捏造型功能
文章目录
- 1. 模型选择
- 2. 变形和调整
- 3. 材质和纹理
- 4. 部件修改
- 5. 关节和动作
- 6. 物理模拟
3D机甲捏造型功能通常包括以下小功能:
-
模型选择:通过从库中选择机甲模型或导入自定义模型来开始设计。
-
变形和调整:调整机甲的大小、比例、旋转和位置,以适应特定场景或体验。
-
材质和纹理:为机甲选择不同的材质和纹理,以改变外观和视觉效果。
-
部件修改:通过添加、删除或修改机甲的部件,以创建全新的机甲或改进现有机甲的性能和功能。
-
关节和动作:设置机甲的关节和动作,以模拟机械运动和行为。
-
物理模拟:通过添加物理效果,模拟机甲的重量和力量,并响应外部力的作用。
下面是一个简单的Java代码示例,使用工厂模式来实现机甲捏造型的基本功能:
1. 模型选择
// 机甲模型接口,定义了机甲模型的基本行为
public interface MechaModel {String getName(); // 获取机甲模型的名称
}// 具体机甲模型类,实现了机甲模型接口,用于提供具体的机甲模型名称
public class GundamModel implements MechaModel {@Overridepublic String getName() {return "Gundam";}
}public class EvaModel implements MechaModel {@Overridepublic String getName() {return "Evangelion";}
}// 机甲模型工厂类,用于创建不同的机甲模型实例
public class MechaModelFactory {public MechaModel createModel(String modelName) {// 根据传入的模型名称,返回对应的机甲模型实例if (modelName.equals("Gundam")) {return new GundamModel(); // 返回 GundamModel 实例} else if (modelName.equals("Evangelion")) {return new EvaModel(); // 返回 EvaModel 实例}return null; // 如果传入的 modelName 不在预设的模型列表中,则返回 null}
}
2. 变形和调整
// 机甲变形接口
public interface MechaTransformer {// 调整机甲大小的方法void resize(float scale);// 旋转机甲的方法,参数为旋转角度void rotate(float angle);// 移动机甲的方法,参数为移动距离void translate(float x, float y, float z);
}// 具体机甲变形类
public class MechaTransformerImpl implements MechaTransformer {@Overridepublic void resize(float scale) {// 输出调整机甲大小的信息System.out.println("Resizing mecha by " + scale);}@Overridepublic void rotate(float angle) {// 输出旋转机甲的信息,包括旋转的角度System.out.println("Rotating mecha by " + angle + " degrees");}@Overridepublic void translate(float x, float y, float z) {// 输出移动机甲的信息,包括移动的距离System.out.println("Translating mecha by (" + x + ", " + y + ", " + z + ")");}
}
3. 材质和纹理
// 机甲材质接口
public interface MechaMaterial {String getMaterial(); // 返回机甲材质信息的方法
}// 具体机甲材质类
public class MechaMetal implements MechaMaterial {@Overridepublic String getMaterial() {return "Metal"; // 返回金属材质信息}
}public class MechaPlastic implements MechaMaterial {@Overridepublic String getMaterial() {return "Plastic"; // 返回塑料材质信息}
}// 机甲材质工厂类
public class MechaMaterialFactory {public MechaMaterial createMaterial(String materialName) {if (materialName.equals("Metal")) { // 如果是金属材质return new MechaMetal(); // 返回金属材质实例} else if (materialName.equals("Plastic")) { // 如果是塑料材质return new MechaPlastic(); // 返回塑料材质实例}return null; // 如果参数不符合要求,返回空}
}
4. 部件修改
// 机甲部件接口
public interface MechaComponent {// 添加机甲部件void addComponent(String componentName);// 移除机甲部件void removeComponent(String componentName);// 修改机甲部件void modifyComponent(String componentName);
}// 具体机甲部件类
public class MechaComposite implements MechaComponent {// 机甲部件列表private List<MechaComponent> components = new ArrayList<>();@Overridepublic void addComponent(String componentName) {// 将机甲部件添加到列表中components.add(new MechaPart(componentName));}@Overridepublic void removeComponent(String componentName) {// 遍历机甲部件列表,找到要移除的机甲部件并移除之for (MechaComponent component : components) {if (component instanceof MechaPart && ((MechaPart) component).getName().equals(componentName)) {components.remove(component);break;}}}@Overridepublic void modifyComponent(String componentName) {// 遍历机甲部件列表,找到要修改的机甲部件并修改之for (MechaComponent component : components) {if (component instanceof MechaPart && ((MechaPart) component).getName().equals(componentName)) {((MechaPart) component).modify();break;}}}
}public class MechaPart implements MechaComponent {// 机甲部件名称private String name;public MechaPart(String name) {this.name = name;}public String getName() {return name;}public void modify() {// 修改机甲部件System.out.println("正在修改机甲部件:" + name);}@Overridepublic void addComponent(String componentName) {// 无法给机甲部件添加子部件System.out.println("无法向机甲部件添加子部件");}@Overridepublic void removeComponent(String componentName) {// 无法从机甲部件中移除子部件System.out.println("无法从机甲部件中移除子部件");}@Overridepublic void modifyComponent(String componentName) {// 无法修改机甲部件的子部件System.out.println("无法修改机甲部件的子部件");}
}
5. 关节和动作
// 机甲关节接口
public interface MechaJoint {void setRotation(float angle); // 设置机甲关节旋转角度的方法void setTranslation(float x, float y, float z); // 设置机甲关节位移的方法
}// 具体机甲关节类
public class MechaJointImpl implements MechaJoint {private float rotationAngle = 0; // 机甲关节旋转角度,默认为0private float translationX = 0; // 机甲关节x轴位移,默认为0private float translationY = 0; // 机甲关节y轴位移,默认为0private float translationZ = 0; // 机甲关节z轴位移,默认为0@Overridepublic void setRotation(float angle) { // 实现接口中设置机甲关节旋转角度的方法rotationAngle = angle; // 设置机甲关节旋转角度为传入的角度System.out.println("Setting Mecha joint rotation to " + angle + " degrees"); // 输出设置的旋转角度}@Overridepublic void setTranslation(float x, float y, float z) { // 实现接口中设置机甲关节位移的方法translationX = x; // 设置机甲关节x轴位移为传入的x值translationY = y; // 设置机甲关节y轴位移为传入的y值translationZ = z; // 设置机甲关节z轴位移为传入的z值System.out.println("Setting Mecha joint translation to (" + x + ", " + y + ", " + z + ")"); // 输出设置的位移值}
}
6. 物理模拟
// 机甲物理效果接口
public interface MechaPhysics {// 应用力量void applyForce(float x, float y, float z);// 模拟物理效果void simulate(float deltaTime);
}// 具体机甲物理效果类
public class MechaPhysicsImpl implements MechaPhysics {// 速度分量private float velocityX = 0;private float velocityY = 0;private float velocityZ = 0;// 加速度分量private float accelerationX = 0;private float accelerationY = 0;private float accelerationZ = 0;@Override// 实现应用力量接口public void applyForce(float x, float y, float z) {accelerationX += x;accelerationY += y;accelerationZ += z;}@Override// 实现模拟物理效果接口public void simulate(float deltaTime) {// 根据加速度计算速度velocityX += accelerationX * deltaTime;velocityY += accelerationY * deltaTime;velocityZ += accelerationZ * deltaTime;// 输出机甲速度System.out.println("Mecha velocity: (" + velocityX + ", " + velocityY + ", " + velocityZ + ")");}
}
以上代码示例展示了使用工厂模式来实现基本的机甲捏造型功能。其他的设计模式也可以用来更好地实现这些功能,比如建造者模式、适配器模式、装饰器模式等。
相关文章:

【3D机甲】捏造型功能
文章目录 1. 模型选择2. 变形和调整3. 材质和纹理4. 部件修改5. 关节和动作6. 物理模拟 3D机甲捏造型功能通常包括以下小功能: 模型选择:通过从库中选择机甲模型或导入自定义模型来开始设计。 变形和调整:调整机甲的大小、比例、旋转和位置&…...

设计模式之五:单例模式
有些对象只需要有一个,比如线程池、缓存和注册表等。 对比全局变量,其需要在程序开始就创建好对象,如果这个对象比较耗资源,而在后面的执行过程中又一直没有用到,就造成了浪费。 class Singleton {private:static Si…...

MATLAB的设置路径
在主页下的 或者在命令行输入path,命令行会出现所有路径 必须要将某些函数.m文件以及一些类文件包含在路径当中,否则在脚本代码中输入代码时,不会有代码提示...

Hyperledger Fabric 使用 CouchDB 和复杂智能合约开发
前言 在上个实验中,我们已经实现了简单智能合约实现及客户端开发,但该实验中智能合约只有基础的增删改查功能,且其中的数据管理功能与传统 MySQL 比相差甚远。本文将在前面实验的基础上,将 Hyperledger Fabric 的默认数据库支持 …...

这应该是最全的,Fiddler手机App抓包详解,看完还不会来找我...
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 什么是抓包&#…...
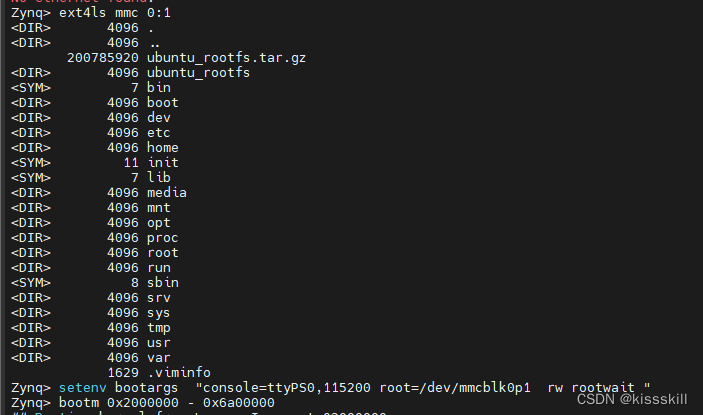
使用ubuntu-base制作根文件系统
1:ubuntu官网下载最小根文件系统: 放置到电脑的ubuntu中, Mkdir Ubuntu_rootfs Cd Ubuntu_rootfs Sudo tar –zxvf Ubuntu-bash-xxxxxx.tar.gz 2:电脑的ubuntu安装qemu搭建arm模拟系统 将/usr/bin/qemu-arm-static/(64位拷贝…...

springboot-mybatis的分页查询的接口
一、安装依赖 <dependency><groupId>com.github.pagehelper</groupId><artifactId>pagehelper-spring-boot-starter</artifactId><version>1.4.6</version> </dependency> 二、代码定义 分页对象类 Data AllArgsConstruct…...

网络音频终端音频编码解码终端
网络对讲终端SV-7011V 网络对讲终端SV-7011V,采用了ARM音频DSP架构,集网络对讲、网络广播、监听等功能于一身,内置麦克风、配置line out、line in、Mic in功能输出接口,适用于学校,机场,广场等场所。 产品…...
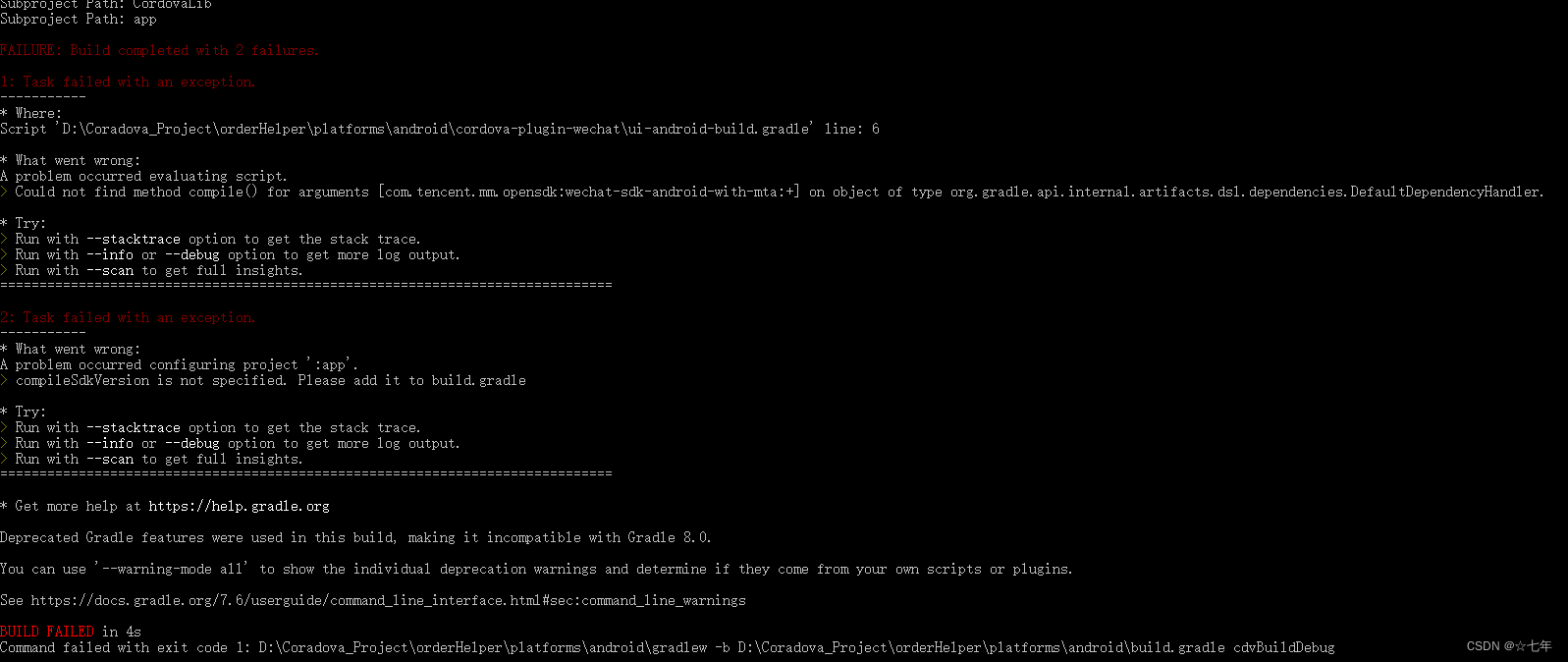
cordova 12 编译失败Could not find method compile() for arguments [com....]
问题: Could not find method compile() for arguments [com.tencent.mm.opensdk:wechat-sdk-android-with-mta:] on object of type org.gradle.api.internal.artifacts.dsl.dependencies.DefaultDependencyHandler. 问题原因: 在Cordova项目中&…...
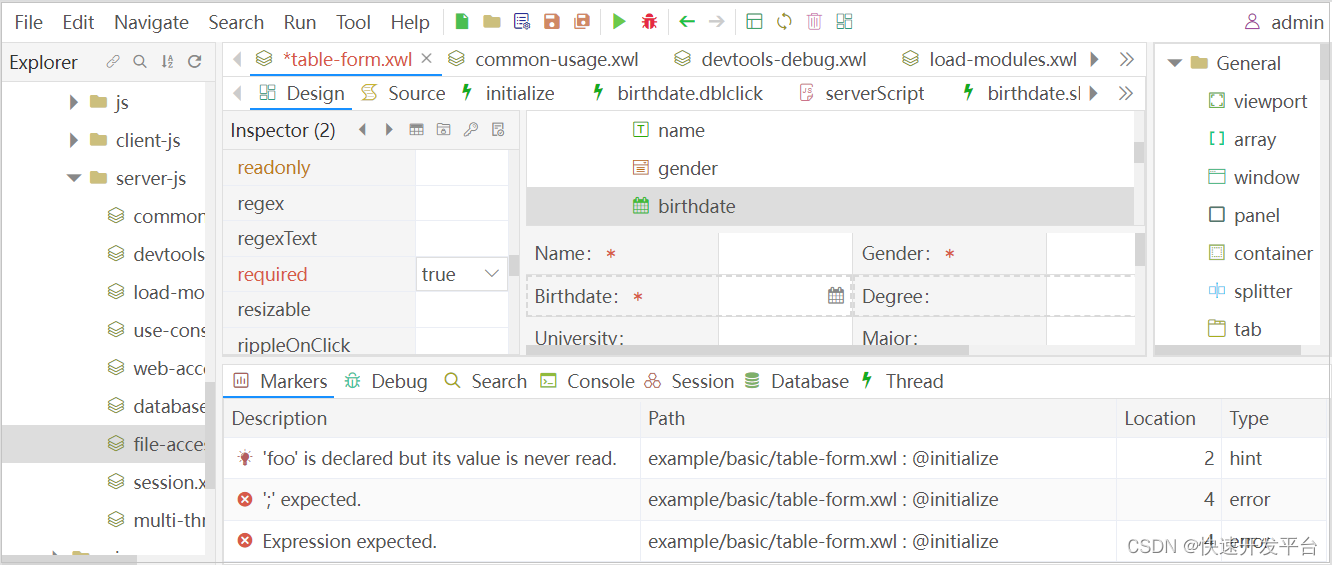
快速开发平台 WebBuilder 9 发布
WebBuilder 是一款强大,全面和高效的应用开发和运行平台。基于浏览器的集成开发环境,智能化的设计,能轻松完成常规桌面应用和面向手机等的移动应用开发。高效、稳定和可扩展的特点,适合复杂企业级应用的运行。跨平台、数据库和浏览…...

GPT-5出世,需5万张H100!英伟达GPU陷短缺风暴
随着人工智能技术的不断突破,自然语言处理领域也掀起了一波又一波的革命。从GPT-3.5的惊艳登场,到紧随其后的GPT-4的惊世震人,人们仿佛置身于科幻电影中,亲历了一场场技术的奇迹。然而,这场奇迹背后却逐渐显现出一道不…...
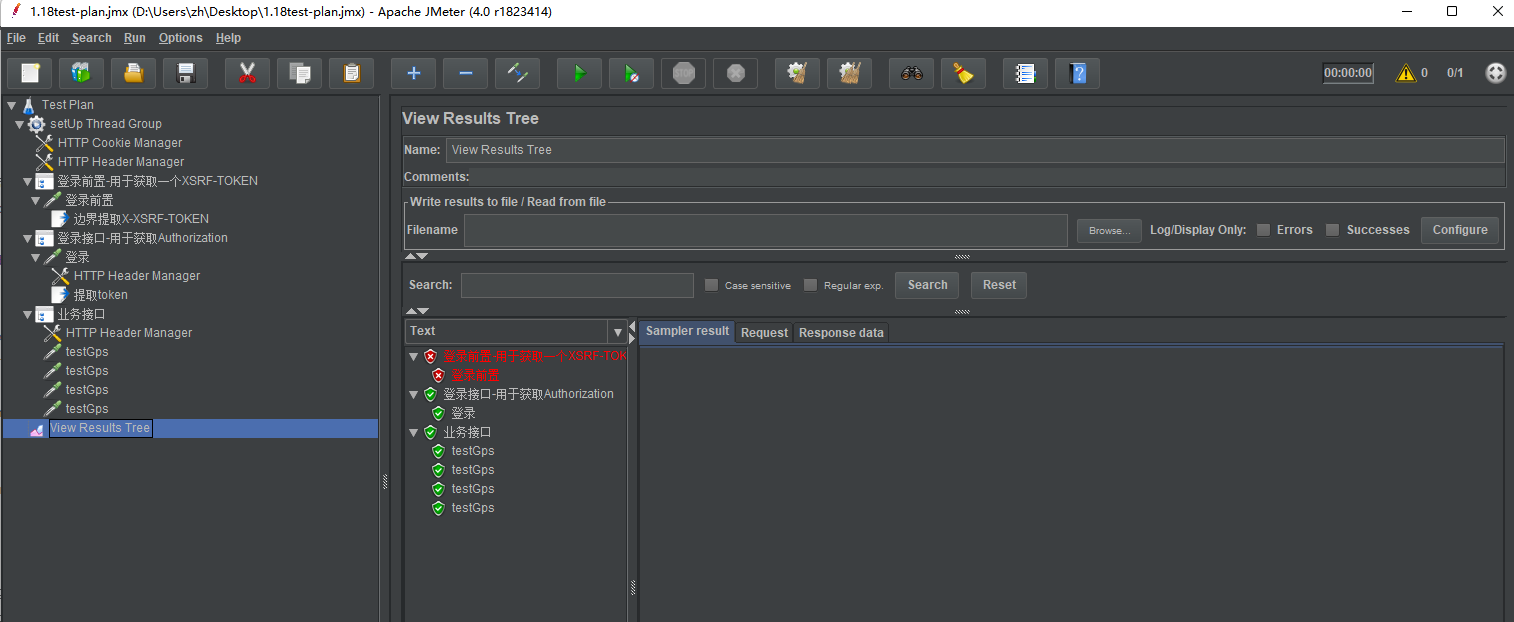
Jmeter学习和一个关于jmeter获取X-XSRF-TOKEN时的坑
Jmeter学习和一个关于jmeter获取X-XSRF-TOKEN时的坑 现在想对一个接口做性能测试,需要测试它多个线程并发下的调用 1.新建测试计划和线程组 略 2.新建http接口 一个完整的http接口包含请求头和请求,这里就需要两个组件:HTTP request、HT…...

SQL注入总结
0x00 前言 简单的总结一下SQL注入的内容 0x01 常规注入 通过特殊字符测试闭合,通常使用的闭合方式有 " ) ")等 1.判断字段 a union select 1,2,3 #2.执行基础内容 a union select 1,database(),3 #3.查表 a union select 1,group_concat(table_na…...

Java 实现 后端分页
背景说明 在实际开发中,基于数据库表结构进行SQL查询,如果要对结果进行分页,可以借助一些工具类,如:基于Mybatis的 工具类 PageHelper。 但是,有时分页的对象是经过一些业务逻辑处理的列表,如…...
数据结构 | 搜索和排序——排序
目录 一、冒泡排序 二、选择排序 三、插入排序 四、希尔排序 五、归并排序 六、快速排序 排序是指将集合中的元素按照某种顺序排序的过程。 一、冒泡排序 冒泡排序多次遍历列表。它比较相邻的元素,将不合顺序的交换。每一轮遍历都将下一个最大值放到正确的位…...

【嵌入式环境下linux内核及驱动学习笔记-(18)LCD驱动框架1-LCD控制原理】
目录 1、LCD显示系统介绍1.1 LCD显示基本原理1.1.1 颜色的显示原理:1.1.2 图像的构成 1.2 LCD接口介绍1.2.1 驱动接口 - MCU接口1.2.2 驱动接口 - RGB接口1.2.3 驱动接口 - LVDS接口1.2.4 驱动接口 - MIPI接口1.2.5 RGB / MIPI / LVDS三种接口方式的区别:…...
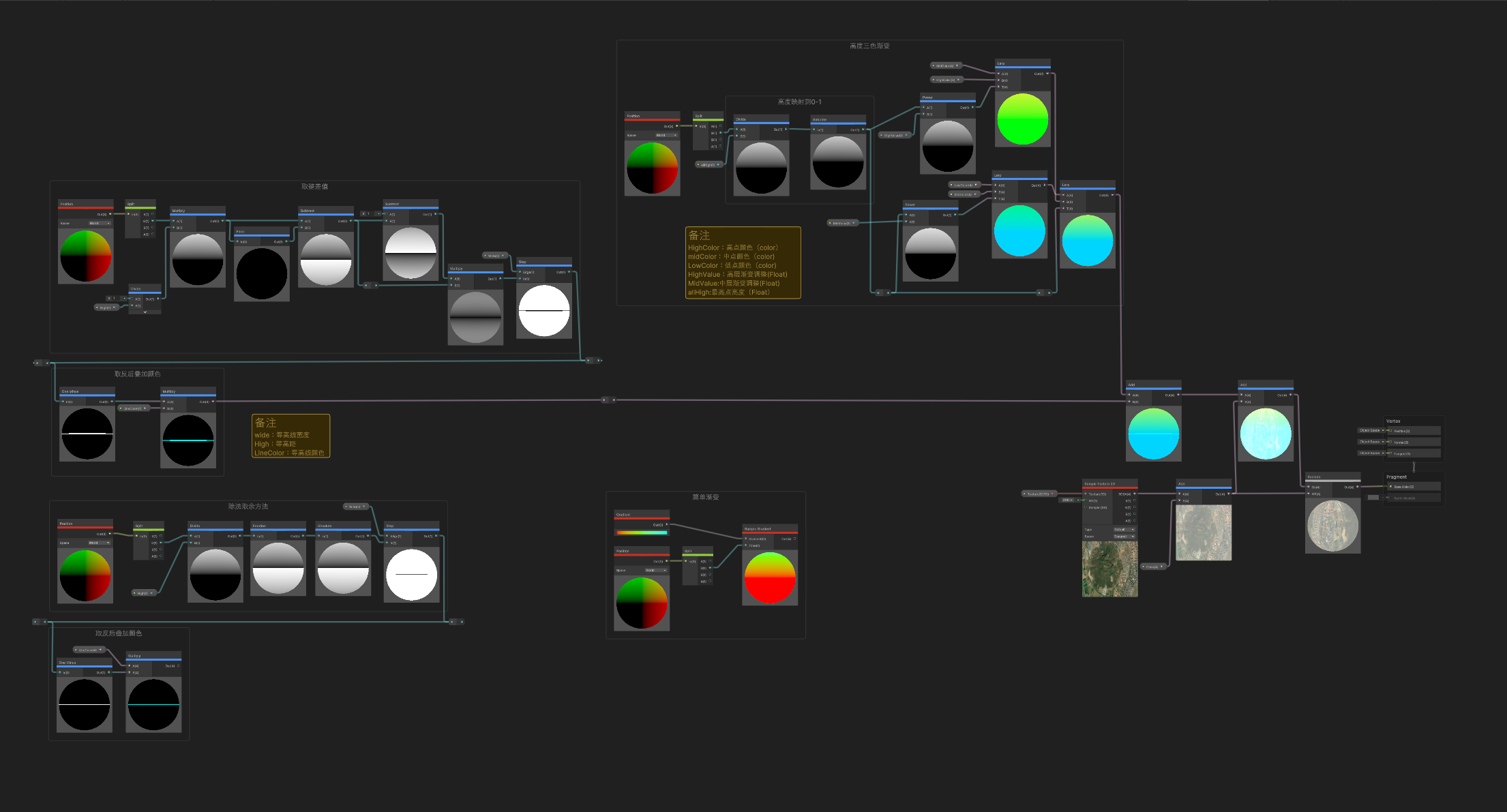
【unity】ShaderGraph实现等高线和高程渐变设色
【unity】ShaderGraph实现等高线和高程渐变设色 等高线的实现思路 方法一: 通过Position节点得到顶点的高度(y)值,将高度值除去等高距离取余,设定余数的输出边界(step) 方法二: 将…...
快速修复应用程序中的问题的利器—— Android热修复
热修复技术在Android开发中扮演着重要的角色,它可以帮助开发者在不需要重新发布应用程序的情况下修复已经上线的应用程序中的bug或者添加新的功能。 一、热修复是什么? 热修复(HotFix)是一种在运行时修复应用程序中的问题的技术…...

什么是全局代理,手机怎么设置全局代理
目录 什么是全局代理 全局代理的优缺点 优点 缺点 手机怎么设置全局代理 注意事项 总结 在计算机网络和信息安全中,全局代理是一种常用的技术手段,用于将网络流量通过代理服务器进行转发和处理。本文将介绍什么是全局代理,探讨全局代理…...

技术领先产品ASSAR300一一基于SAR成像的角雷达产品,助力自动泊车
作为自动驾驶应用场景中最先被推广和商业化落地的自动泊车功能,目前是在一些限定环境下实现了功能跑通。面对多种多样的复杂停车场场景,系统需要不断增强感知算法能力或寻求新的传感器技术,来提升对周围环境感知和对障碍物探测的精准度。 传…...

别再让模型在Unity里‘抽风’了!Blender导出FBX到Unity的7步避坑自查清单
别再让模型在Unity里‘抽风’了!Blender导出FBX到Unity的7步避坑自查清单当你花了三天三夜精心雕琢的Blender模型,导入Unity后却变成了一团旋转错乱、贴图闪烁的"抽象艺术",那种崩溃感每个3D开发者都懂。本文将用实战经验帮你建立一…...

Taurus多执行器对比实战:JMeter/Gatling/Locust统一压测方案
1. 为什么选Taurus做多执行器对比——不是为了炫技,而是为了少踩坑在性能测试领域,我见过太多团队卡在“选型”这一步:刚招来一个会写JMeter脚本的工程师,项目突然要压测WebSocket接口,发现JMeter原生支持弱、插件维护…...

从Office功能区的“局外人“到“掌控者“:Office RibbonX Editor深度指南
从Office功能区的"局外人"到"掌控者":Office RibbonX Editor深度指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/g…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

贵阳婚礼西服定制攻略:面料、工艺、版型避坑指南
婚礼西装是男士婚礼造型的核心,区别于日常商务正装,婚礼西服更看重版型精致度、面料质感、上身挺拔感以及镜头适配度。在贵阳备婚的新人,大多会放弃成品西装,选择专属定制服务。但本地婚礼西服定制市场参差不齐,很多新…...

Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程
更多请点击: https://intelliparadigm.com 第一章:Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程 Lindy自动化平台以“越久越可靠”为设计哲学,将经典软件工程原则与现代可观测性实践深度融合。其核心优势…...

AI写的论文双率如何压到20%以下?这几款工具实测有效
毕业季、投稿季用AI写论文已经成为不少人的高效选择,但查重率飘红、AIGC疑似率超标两大问题,让很多人犯了难。2026年学术检测标准持续收紧,知网、维普及主流AIGC检测系统同步上线双检规则,两项指标均控制在20%以下才符合基本提交要…...

巨量投放总结
巨量商务管理平台 : https://business.oceanengine.com 巨量广告投放平台: https://ad.oceanengine.com 商务管理平台 账户 广告组 计划 广告投放平台 层级关系: 广告组 -> 计划 -> 创意 对应FB: 系列 - > 广告组 -> 广告...

BiliRoamingX:彻底解决B站体验限制的完整增强方案
BiliRoamingX:彻底解决B站体验限制的完整增强方案 【免费下载链接】BiliRoamingX-integrations BiliRoamingX integrations and patches powered by ReVanced. 项目地址: https://gitcode.com/gh_mirrors/bi/BiliRoamingX-integrations 你是否曾为B站的内容区…...

Taotoken的审计日志功能为企业API安全与合规管理提供支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的审计日志功能为企业API安全与合规管理提供支持 当企业决定将大模型能力集成到内部业务流程中时,IT管理员和安…...