Benchmarking Augmentation Methods for Learning Robust Navigation Agents 论文阅读
论文信息
题目:Benchmarking Augmentation Methods for Learning Robust Navigation Agents: the Winning Entry of the 2021 iGibson Challenge
作者:Naoki Yokoyama, Qian Luo
来源:arXiv
时间:2022
Abstract
深度强化学习和可扩展的真实感模拟的最新进展使得用于各种视觉任务(包括导航)的具体人工智能日益成熟。然而,虽然在教导实体主体在静态环境中导航方面取得了令人印象深刻的进展,但在可能包括移动行人或可移动障碍物的动态环境中却取得了较少的进展。
在这项研究中,我们的目标是对不同的增强技术进行基准测试,以提高代理在这些具有挑战性的环境中的性能。我们表明,在训练过程中向场景中添加几个动态障碍可以显着提高测试时泛化能力,从而实现比基线智能体更高的成功率。我们发现这种方法还可以与图像增强方法相结合,以获得更高的成功率。此外,我们还表明,与图像增强方法相比,这种方法对于模拟到模拟的传输也更加稳健。
最后,我们通过使用这种动态障碍物增强方法来训练代理参加 CVPR 的 2021 年 iGibson 挑战赛,展示了这种动态障碍物增强方法的有效性,该方法在交互式导航方面获得了第一名。
Introduction
自主导航是一项艰巨的挑战,通常需要机器人使用视觉传感器来理解和推理周围环境。幸运的是,最近的几项使用深度强化学习的工作通过部署可以在现实世界的新环境中成功导航的机器人显示出了有希望的结果[1],[2]。
PointGoal Navigation [3] 是一项经过充分研究的任务,它要求代理到达其环境中的目标坐标位置。然而,它通常假设环境是静态的并且没有动态物体,这与可能包含移动的人类和宠物或小型可移动障碍物和家具的真实家庭和办公室相去甚远。
最近 2021 年 CVPR 会议上的 iGibson 挑战赛 [4] 旨在鼓励研究人员研究两个难度更大的 PointNav 修改版本:交互式导航(InteractiveNav)和社交导航(SocialNav)。在 InteractiveNav 中,代理必须到达目标,同时推开阻碍路径的可移动障碍物。对于 SocialNav,代理必须达到目标,同时避免与穿越可能无法屈服的环境的人类发生碰撞。
这些动态任务带来了静态导航设置中不存在的新挑战。
对于 InteractiveNav,代理必须区分可移动和不可移动的物体,并学习如何在必要时将可移动的物体推向正确的方向,以形成到达目标的更短路径。
对于 SocialNav,智能体必须避开附近行人的轨迹并在不与任何人发生碰撞的情况下到达目标。使动态导航任务变得更加困难的另一个因素是可用于模拟动态环境的数据的稀疏性。
虽然静态 3D 环境有大量数据集,例如 Gibson [5] 和 HM3D [6],但包含单独可交互且正确布置的家具的动态环境数据集却要稀疏得多。对于 2021 年 iGibson 挑战赛,只有 8 个训练场景可用
为了解决动态导航的挑战和训练场景可用性的限制,我们的目标是提供视觉导航增强技术的基准和分析,以便其他研究人员可以利用我们在 iGibson 挑战赛中的发现。
特别是,我们表明,在训练期间简单地向场景中添加几个动态障碍物(行人)可以显着提高代理在新环境中的测试时成功率,即使对于环境中不涉及动态障碍物的导航任务(例如 PointNav 和互动Nav.我们进行了系统分析,其中我们扫描了可用的训练数据量和训练期间使用的动态行人的数量
我们将这种动态障碍物增强方法与两种图像增强方法(Crop 和 Cutout)进行比较,Laskin 等人 [7] 证明这两种方法可以显着提高视觉任务各种基准上的测试时间泛化性(高达 4 倍的性能改进)[8 ],[9]。
我们表明
- 动态障碍物增强可以与图像增强协同结合,以进一步提高性能。
- 相比之下,组合不同的图像增强方法会降低性能增益。
- 动态障碍物增强对于模拟到模拟的传输也更加稳健。
Related work
PointGoal Navigation
点目标导航(PointNav)由 Anderson 等人在 [3] 中正式定义,是机器人必须从环境中的起始位置导航到目标坐标的任务。在包含障碍物的新场景中执行这是一项具有挑战性的任务,特别是当代理只能访问以自我为中心的相机和自我运动传感器时。尽管存在这些限制,Wijmans 等人 [12] 证明,可以通过深度强化学习在模拟中训练近乎完美(>97% 成功)的 PointNav 代理。
然而,这项工作利用了大量的训练场景;在这项工作中,我们重点关注增强方法如何在只有少量场景可用的场景中提高性能,并表明在此类场景中训练代理以达到相同成功水平的问题尚未解决。
Navigation in Dynamic Environments
Xia 等人最近的工作[11]引入了一项新任务“InteractiveNav”,其中机器人与可移位的物体进行交互以达到目标。这不需要机器人使用机械手;机器人在移动时可以使用其底座简单地推过物体。 InteractiveNav 评估机器人如何平衡采取最短路径到达目标以及它对环境中存在的障碍物的干扰程度。他们的工作表明,可以通过深度强化学习来教导智能体完成这项任务,尽管他们为智能体提供了接下来的十个到达目标位置的路径点作为每一步的观察。
在这项工作中,我们寻求仅使用自我中心视觉和自我运动传感器来研究此任务的性能,以及如何使用增强方法来改进它。
SocialNav 是另一项要求机器人围绕环境中的动态元素进行机动的任务,其中机器人必须在不与附近移动的行人碰撞的情况下到达目标。与我们的工作类似,最近的几项工作也使用了深度强化学习来避免与行人碰撞,例如 SA-CADRL [13] 和 SARL [14],它们使用行人的位置作为对其策略的观察,以及Pérez-D’Arpino 等人 [15] 使用可以访问环境地图和 LiDAR 数据的运动规划器。
与这些作品相比,我们的目标是在没有运动规划器或激光雷达的情况下完成 SocialNav 的任务,并研究如何使用视觉深度强化学习的增强方法来提高性能。我们相信这种设置更适合在新环境中部署,在这些环境中,准确定位行人位置或向运动规划器提供地图可能很困难或不可行。
Enhancing visual navigation performance
Ye 等人 [16] 通过使用自我监督的辅助任务以 Wijman 等人 [12] 的工作为基础,事实证明这可以显着提高样本效率。 Sax 等人 [17] 结合了关于世界的视觉先验,与没有先验的从头到尾的训练相比,获得了性能提升。 Chaplot 等人 [18]、[19] 与典型的端到端代理相比,通过让代理推断有关映射和定位的信息来提高样本效率,这些信息可以使用来自模拟器的特权信息进行监督。
与上面提到的工作不同,我们研究的方法可以在不使用额外的辅助损失、额外的网络头或额外的感官信息(例如,局部占用图)的情况下,对视觉导航产生显着的改进。
Method
Augmentation
训练有效的视觉导航代理需要大型数据集(>70 个 3D 公寓扫描)以避免过度拟合 [12]。然而,访问不同的交互式训练环境可能很困难,特别是对于每个对象都可以单独交互并且必须以现实的方式在环境中排列的动态环境,例如 iGibson 数据集中的合成场景,其中仅包含 15 个场景。对于 2021 年 iGibson 挑战赛,只有 8 个训练场景可用。
在这种数据受限的场景中,增强方法对于提高代理在测试时泛化到新环境的能力至关重要。
Dynamic Obstacle Augmentation
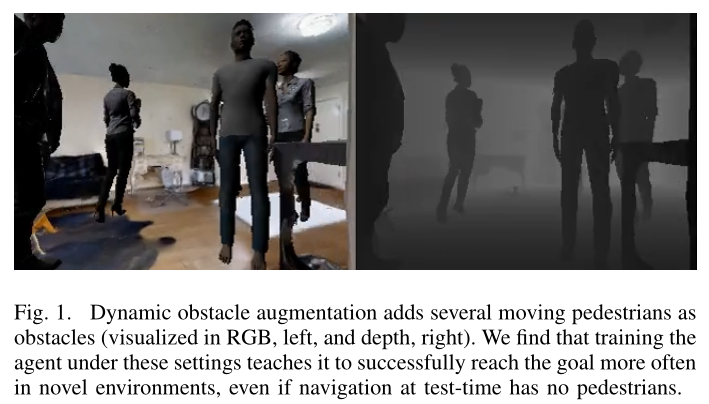
为了提高视觉导航代理的测试时泛化能力,我们在环境中引入了几个移动的行人(如图 1 和图 2 所示)。
这种方法旨在防止智能体学习过度适应训练期间看到的环境;
由于场景中存在大量移动的视觉干扰物,智能体更难以通过摄像头的观察来记住训练环境的布局。
此外,与简单地扰乱智能体视觉输入的图像增强方法不同,该方法迫使智能体为给定情节的一对起始目标位置学习更多种类的路径。
由于每次重置环境时行人所采取的路径都是新生成的,因此代理无法始终在同一对起始目标位置之间采取相同的路径而不与行人发生碰撞。
在训练过程中,这些移动的行人被视为不允许智能体碰撞的动态障碍物。如果特工与行人之间发生碰撞,则事件会直接终止。
使用来自 iGibson 挑战赛 [4] 的站立人 3D 模型代表 3 到 12 名行人,我们发现该模型足够大(对于视觉遮挡),同时具有足够小的半径,可供代理在周围机动。
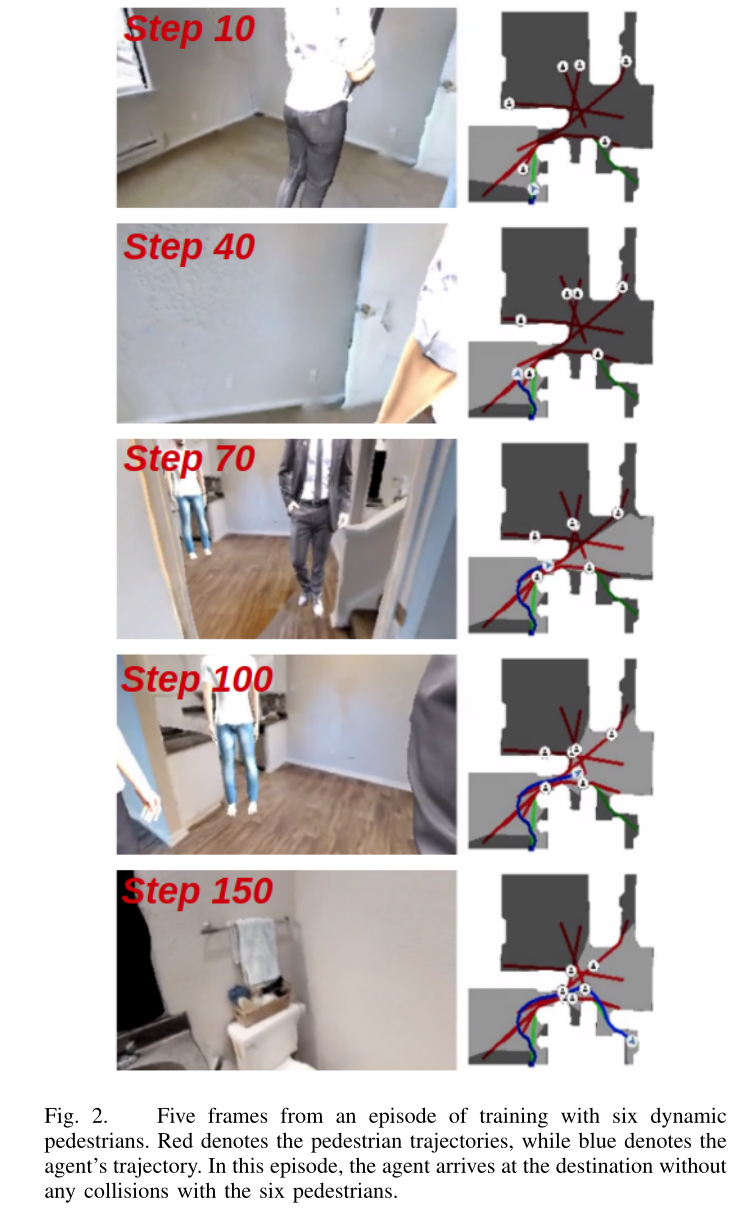
大多数情况。在每次开始时,对于每个行人,从环境中随机采样两个相距至少 3 米的可导航点。
在整个情节中,每个行人都沿着连接这些点的最短无障碍路径来回移动。它具有与智能体相同的最大线速度和角速度,但其速度在每集的基础上从最大值随机降低最多 10%,这样同一集内的不同行人可以以不同的速度移动
Comparison with Image–based Data Augmentyation
图像增强旨在使用随机扰动(例如裁剪、擦除或旋转)注入不变性先验。
特别是,Laskin 等人 [7] 表明,裁剪和剪切图像增强(见图 3)是提高视觉深度强化学习性能最有效的方法之一。
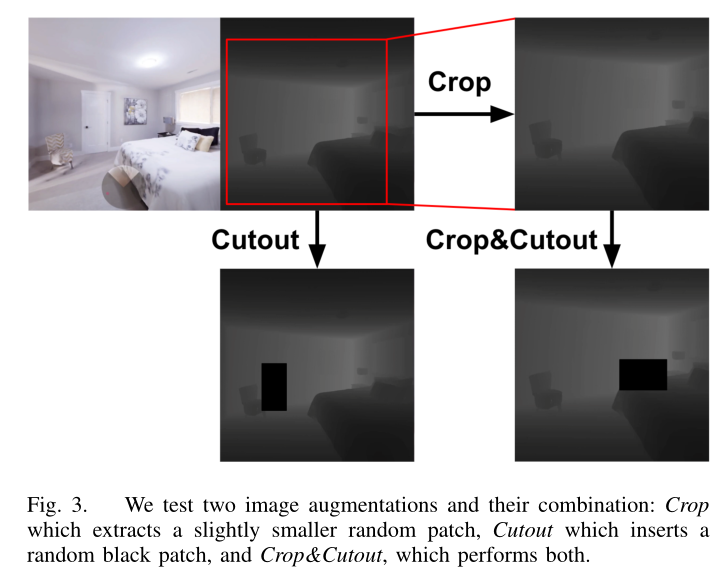
Crop从原始帧中提取随机补丁;与 Laskin 等人类似,我们在随机位置裁剪帧,使生成的图像在高度和宽度上缩短 8%(即保持原始纵横比)。 Chung 等人[20]详细介绍了 Cutout,将随机形状、长宽比和位置的黑色矩形插入到原始帧中。我们使用与Zhong等人相同的参数,其中矩形的长宽比可以在[0.3,3.33]之间,并且其相对于原始帧的比例可以在[0.02,0.33]之间。此外,我们还研究了 Crop&Cutout,它通过顺序应用将 Crop 和 Cutout 结合起来。
Problem Formulation and Learning Method
Observation and Action Spaces
在每一步中,该策略都会观察以自我为中心的(第一人称)深度图像及其相对距离以及到目标点的方向作为输入。
由于目标点是相对于智能体的初始位置指定的,并且自我运动传感器指示智能体距其初始位置的相对距离和航向,因此它们可用于计算智能体当前到目标的相对距离和航向。
我们选择仅使用深度视觉,而不是同时使用深度和 RGB 视觉,正如 Wijmans 等人 [12] 所表明的那样,与单独使用深度相比,包含 RGB 会损害性能。该策略输出二维对角高斯动作分布,从中采样一对动作(线速度和角速度)。最大速度为 0.5 m/s 和 90°/s,策略轮询频率为 10 Hz。如果速度的大小低于某个阈值(我们实验中最大值的 10%),则会被视为代理调用停止操作,从而结束该事件
Reward Function
无论使用哪种增强方法(如果有的话),我们所有实验使用的奖励函数都是相同的:

其中 − Δ d -Δ_d −Δd 是自前一个状态以来到目标的测地距离的变化, I b a c k 、 I c o l I_{back}、I_{col} Iback、Icol 和 I s u c c I_{succ} Isucc 是二进制标志,指示智能体是否已向后移动、与环境发生碰撞或成功终止该事件(请参阅成功标准分别见第 III-B 小节)。 w 1 w_1 w1 充当每一步产生的恒定松弛惩罚,以鼓励智能体最大限度地减少剧集完成时间。 w 1 、 w 2 w_1、w_2 w1、w2 和 w 3 w_3 w3 设置为 0.002、0.02 和 10.0。向后运动受到惩罚,因为我们观察到它通常会导致视觉导航性能不佳。然而,我们并不能完全阻止它,因为向后移动有助于避免突然出现在机器人视野中的传入障碍物
Success Criteria
对于所有任务,仅当代理满足以下条件时,事件才会被视为成功:
(1) 调用终止事件的停止操作
(2) 代理位于目标点的 0.2 m 范围内。在 500 步后,或者在进行 SocialNav 或使用动态障碍物增强训练时,如果智能体与动态行人发生碰撞,则情节将终止并被视为不成功。如果智能体距离行人 0.3 m 以内,则视为与行人发生碰撞。
Network Architecture and Training
我们的网络架构有两个主要组成部分;视觉编码器和循环策略。
视觉编码器是一个 ResNet-18 [21] 卷积神经网络,它从深度图像中提取视觉特征。该策略是具有 512 维隐藏状态的 2 层 LSTM [22]。该策略接收视觉特征、相对距离和到目标的方向、先前的动作及其先前的 LSTM 隐藏状态。除了输出动作的头之外,该策略还有一个输出状态值估计的批评者头,用于近端策略优化(PPO)强化学习,如 Schulman 等人在 [23] 中所述。我们使用 Wijmans 等人的去中心化分布式 PPO [12] 来使用并行化来训练我们的代理,并使用相同的学习超参数。
我们为每个 GPU 训练 8 个工作线程,使用 8 个 GPU 总共 64 个工作线程并行收集经验。每个代理都经过 500M 步骤的训练(约 280 个 GPU 小时,或约 35 小时挂钟)
Experiment
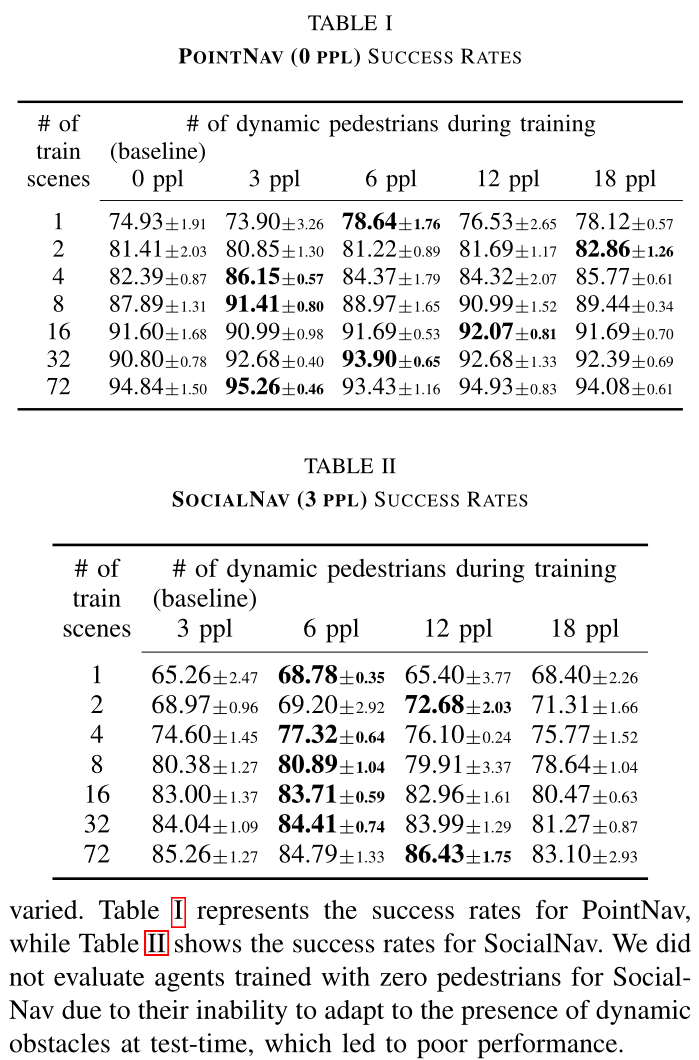
发现 1:即使环境是静态的,动态障碍物增强也能提高视觉导航性能。
发现2:动态障碍物增强在训练场景较少的情况下更有效。
发现 3:图像增强也可以提高测试时的成功率,但将它们结合起来会降低性能增益。
发现 4:将动态障碍物和图像增强技术相结合可以进一步提高成功率。
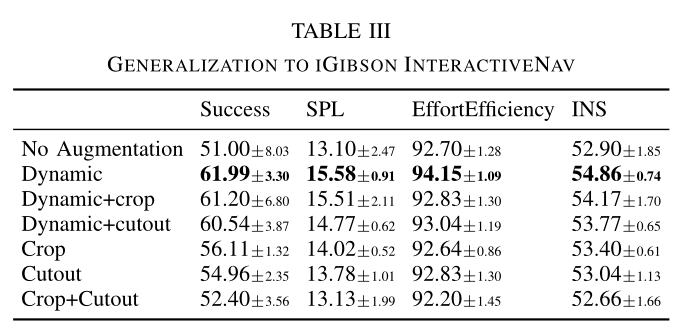
发现 5:动态障碍物增强对于从 Gibson-4+ 到 iGibson 场景的 sim-to-sim 传输更加稳健。
Conclusion
我们的工作可以在几个方向上扩展。我们怀疑,虽然使用动态行人可以提高性能,但过度拥挤可能会使智能体过于保守并导致行为不佳。未来,我们计划引入curriculum learning,在训练过程中逐步增加行人数量,以潜在地增加行人数量,从而最大限度地提高性能。
我们还计划通过将所提出的技术部署到有行人的现实世界来研究其从模拟到真实的转移。然而,我们预计模拟与真实的差距将导致性能显着下降,特别是因为模拟中使用的行人是单个刚体(即四肢不是独立的动画)。这可以通过为模拟人类添加更真实的动作和手势来解决,以减少模拟与真实的差距。
相关文章:
Benchmarking Augmentation Methods for Learning Robust Navigation Agents 论文阅读
论文信息 题目:Benchmarking Augmentation Methods for Learning Robust Navigation Agents: the Winning Entry of the 2021 iGibson Challenge 作者:Naoki Yokoyama, Qian Luo 来源:arXiv 时间:2022 Abstract 深度强化学习和…...

面试题:HTTP Code码及应用场景分析
1xx 消息(临时响应) 属于临时相应,代表所发出的请求已经被接受,需要继续进行处理。只包含状态行和某些可选的响应头信息,并以空行结束。由于 HTTP/1.0 协议中没有定义任何 1xx 状态码,所以除非在某些试验条件下,服务器…...
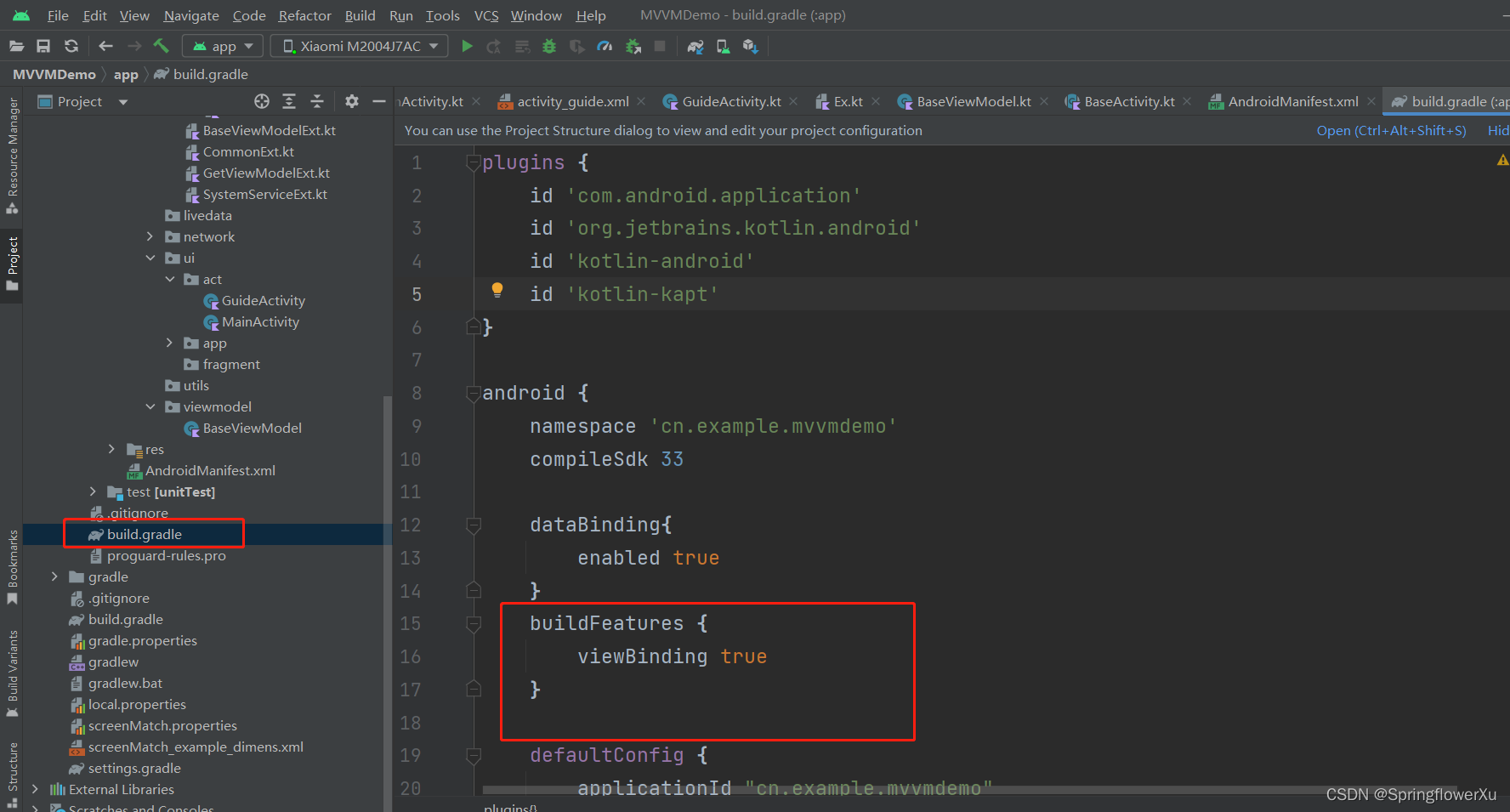
The ‘kotlin-android-extensions‘ Gradle plugin is no longer supported.
Android使用kotlin开发,运行报错 The kotlin-android-extensions Gradle plugin is no longer supported. Please use this migration guide (https://goo.gle/kotlin-android-extensions-deprecation) to start working with View Binding (https://developer.an…...
vi 编辑器入门到高级
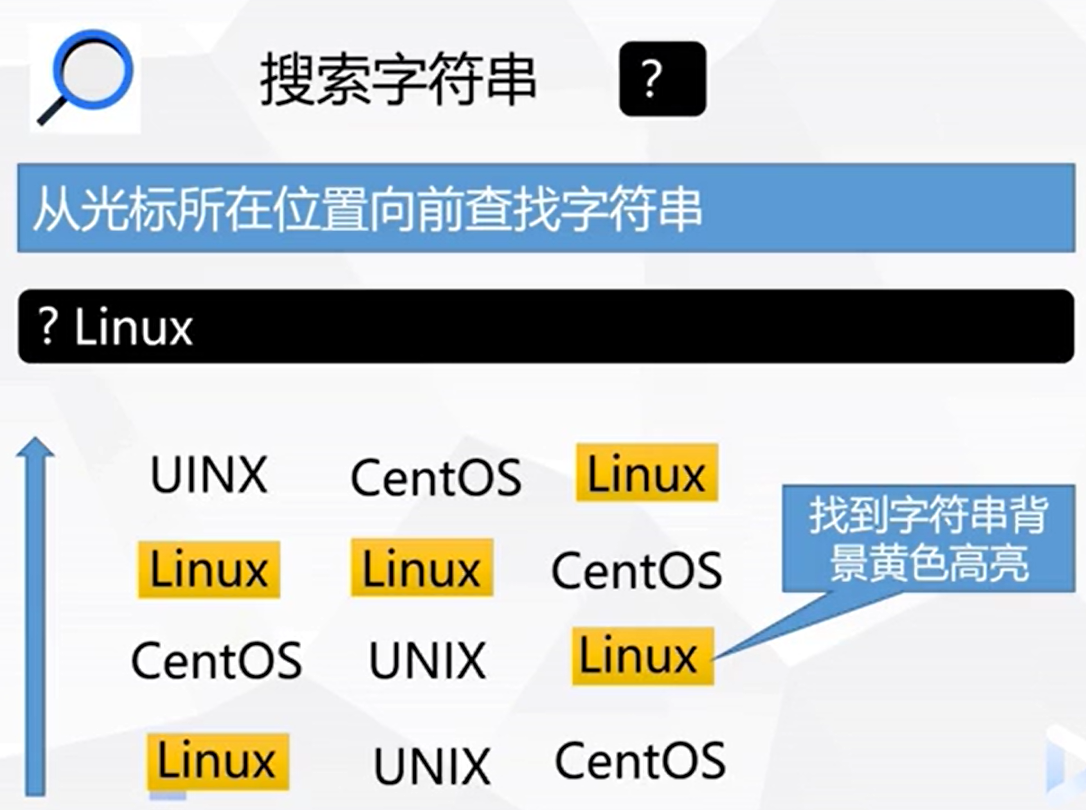
vi 编辑器的初级用法vi 编辑器的工作模式1. 命令模式2. 文本输入模式3. 状态行vi 工作模式切换存储缓冲区 vi 编辑器命令1. 启动 vi2. 文本输入3. 退出 vi4. 命令模式下的 光标移动5. 命令模式下的 文本修改6. 从 命令模式 进入 文本输入模式7. 搜索字符串8. vi 在线帮助文档 v…...

【大数据】Flink 详解(二):核心篇 Ⅰ
Flink 详解(二):核心篇 Ⅰ 14、Flink 的四大基石是什么? Flink 的四大基石分别是: Checkpoint(检查点)State(状态)Time(时间)Windowÿ…...

Day 75:通用BP神经网络 (2. 单层实现)
代码: package dl;import java.util.Arrays; import java.util.Random;/*** Ann layer.*/ public class AnnLayer {/*** The number of input.*/int numInput;/*** The number of output.*/int numOutput;/*** The learning rate.*/double learningRate;/*** The m…...
PHP序列化,反序列化
一.什么是序列化和反序列化 php类与对象 类是定义一系列属性和操作的模板,而对象,就是把属性进行实例化,完事交给类里面的方法,进行处理。 <?php class people{//定义类属性(类似变量),public 代表可…...

Android google admob Timeout for show call succeed 问题解决
项目场景: 项目中需要接入 google admob sdk 实现广告商业化 问题描述 在接入Institial ad 时,onAdLoaded 成功回调,但是onAdFailedToShowFullScreenContent 也回调了错误信息 “Timeout for show call succeed.” InterstitialAd.load(act…...
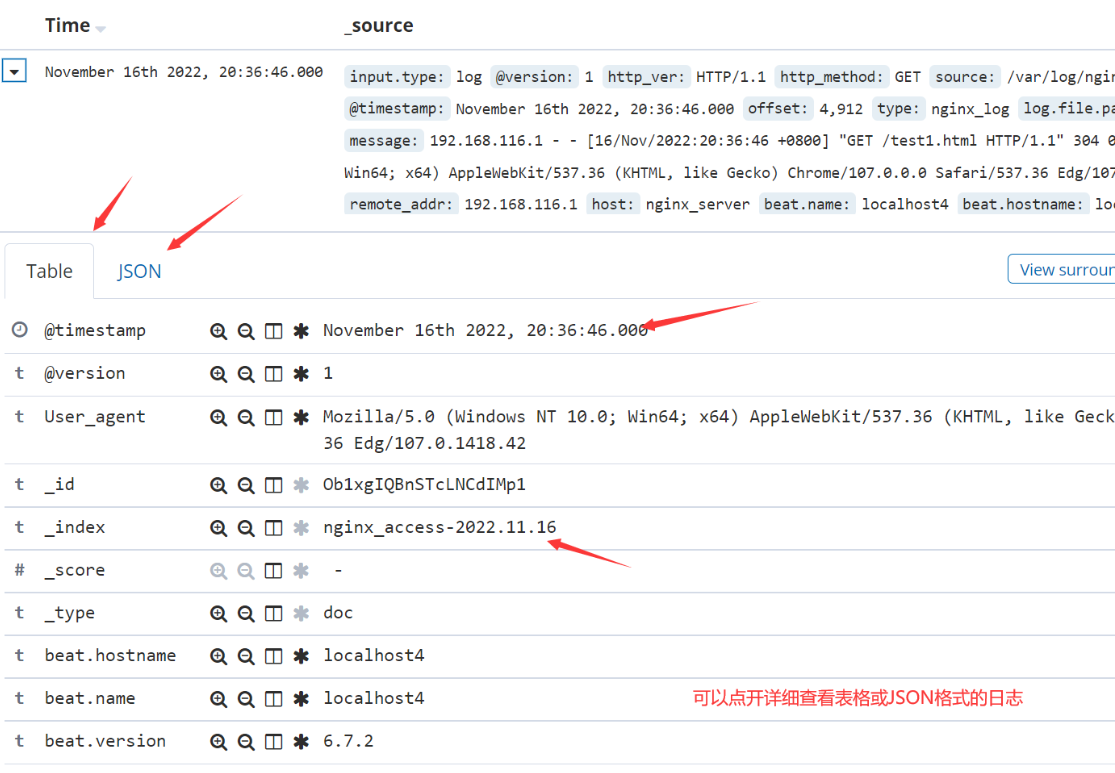
EFLFK——ELK日志分析系统+kafka+filebeat架构
环境准备 node1节点192.168.40.16elasticsearch2c/4Gnode2节点192.168.40.17elasticsearch2c/4GApache节点192.168.40.170logstash/Apache/kibana2c/4Gfilebeat节点192.168.40.20filebeat2c/4G https://blog.csdn.net/m0_57554344/article/details/132059066?spm1001.2014.30…...
)
C# MVC controller 上传附件及下载附件(笔记)
描述:Microsoft.AspNetCore.Http.IFormFileCollection 实现附件快速上传功能代码。 上传附件代码 [Route("myUploadFile")][HttpPost]public ActionResult MyUploadFile([FromForm] upLoadFile rfile){string newFileName Guid.NewGuid().ToString(&quo…...

安装element-plus报错:Conflicting peer dependency: eslint-plugin-vue@7.20.0
VSCode安装element-plus报错: D:\My Programs\app_demo>npm i element-plus npm ERR! code ERESOLVE npm ERR! ERESOLVE could not resolve npm ERR! npm ERR! While resolving: vue/eslint-config-standard6.1.0 npm ERR! Found: eslint-plugin-vue8.7.1 npm E…...

【操作系统】进程和线程对照解释
进程(Process)和线程(Thread)都是操作系统中用于执行任务的基本单位,但它们有着不同的特点和使用方式。 进程(Process): 进程是正在运行的程序的实例。一个程序在运行时会被操作系统…...
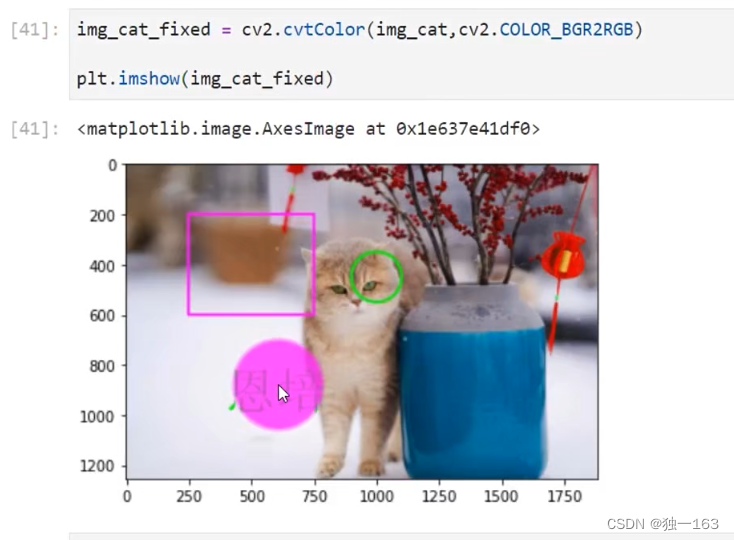
4用opencv玩转图像2
opencv绘制文字和几何图形 黑色底图 显示是一张黑色图片 使用opencv画圆形 #画一个圆 cv2.circle(imgblack_img,center(400,400),radius100,color(0,0,255),thickness10) 画实心圆 只需要把thickness-1。 cv2.circle(imgblack_img,center(500,600),radius50,color(0,0,255),t…...

Swagger的使用
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言1 .介绍2. 使用步骤完整的WebMvcConfiguration.java 3. 常用注解 前言 1 .介绍 Swagger 是一个规范和完整的框架,用于生成、描述、调用和可视化 RE…...
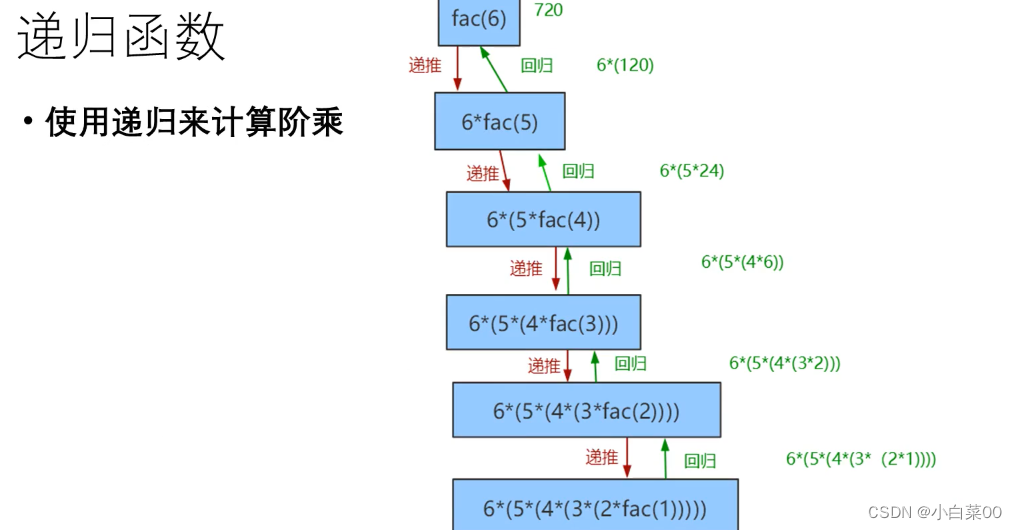
python高阶技巧
目录 设计模式 单例模式 具体用法 工厂模式 优点 闭包 案例 修改闭包外部变量 闭包优缺点 装饰器 装饰器原理 装饰器写法 递归 递归的调用过程 递归的优缺点 用递归计算阶乘 设计模式 含义:设计模式是一种编程套路,通过这种编程套路可…...

Linux和Windows安装MySQL服务
Linux和Windows安装MySQL服务 1 Linux安装MySQL服务1.1 安装1.2 服务端启动1.3 客户端连接 2 Windows安装MySQL服务2.1官网下载安装包(windows)并解压2.2 配置系统环境变量2.3 服务端启动(管理员DOS)2.4 客户端连接(管理员DOS) 3 修改密码4 Windows问题 1 Linux安装MySQL服务 …...

Vue3 第四节 自定义hook函数以及组合式API
1.自定义hook函数 2.toRef和toRefs 3.shallowRef和shallowReactive 4.readonly和shallowReadonly 5.toRaw和markRaw 6.customref 一.自定义hook函数 ① 本质是一个函数,把setup函数中使用的Composition API 进行了封装,类似于vue2.x中的mixin 自定义hook函数…...

门面模式(C++)
定义 为子系统中的一组接口提供一个一致(稳定) 的界面,Facade模式定义了一个高层接口,这个接口使得这一子系统更加容易使用(复用)。 应用场景 上述A方案的问题在于组件的客户和组件中各种复杂的子系统有了过多的耦合,随着外部客户程序和各子…...

ASP.NET Core SignalR
ASP.NET Core SignalR是一个开发实时网络应用程序的框架,它使用WebSocket作为传输协议,并提供了一种简单和高效的方式来实现实时双向通信。 SignalR使用了一种称为"Hub"的概念来管理连接和消息的传递。开发者可以编写自己的Hub类,…...

auto-changelog的简单使用
auto-changelog的简单使用 自动化生成Git提交记录,CHANGELOG.md文件 github:https://github.com/cookpete/auto-changelog 安装 npm install -g auto-changelog配置脚本 package.json文件下 "scripts": {"changelog": "aut…...

【ZYNQ】AXI4总线协议实战:从握手时序到PS-PL高效通信
1. AXI4总线协议基础:从握手信号到通道架构 第一次接触ZYNQ的PS-PL通信时,我被AXI4协议里那些VALID/READY信号搞得头晕眼花。直到在示波器上抓到真实的握手波形,才突然理解这个看似复杂的协议其实像极了我们日常的对话机制——只有当说话方准…...

构建本地化个人助理系统:事件驱动架构与模块化设计实践
1. 项目概述:一个高度可定制的个人助理系统最近在GitHub上看到一个挺有意思的项目,叫“Personal-Assistant”,作者是idk-man69。光看名字,你可能会觉得这又是一个类似Siri或Google Assistant的语音助手,但点进去仔细研…...

手把手教你用三菱FX3U PLC的RS指令和RS2指令与电脑串口调试助手‘对话’
三菱FX3U PLC串口通信实战:从零搭建RS485数据收发系统 第一次接触工业控制系统的串口通信时,我被那些密密麻麻的接线和晦涩的协议参数弄得晕头转向。直到在自动化生产线上亲眼看到PLC通过两根电线与十几台设备稳定通信,才意识到串口技术的精妙…...

如何免费解锁WeMod专业版:2026年终极完整指南
如何免费解锁WeMod专业版:2026年终极完整指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂费用而烦恼吗…...

All in Token,百度李彦宏指出:Token经济,阿里,百度,腾讯,字节,移动,电信,联通,华为,开启新的Token战争
当AI作为生产力已经成为确定性命题,我们当下应该如何衡量一家AI企业的价值?是看大模型跑分刷榜的能力,还是用户每天消耗的token数量?5月13日的Create2026大会上,百度创始人李彦宏提出了一个全新标准——DAA,…...

Go语言缓存雪崩:防止缓存失效
Go语言缓存雪崩:防止缓存失效 1. 雪崩防护 type CacheWithProtection struct {cache *RedisCachemu sync.Mutexlocks map[string]*sync.Mutex }func NewCacheWithProtection(cache *RedisCache) *CacheWithProtection {return &CacheWithProtect…...

基于Groq LPU与React技术栈构建极速AI聊天应用实战
1. 项目概述:当极速推理遇上聊天应用最近在折腾AI应用开发的朋友,估计都绕不开一个词:推理速度。模型能力再强,如果生成一句话要等上十几秒,用户体验就无从谈起。正是在这种背景下,我注意到了unclecode/gro…...

开源技能图谱工具SkillPort:Go语言构建的知识管理利器
1. 项目概述:一个技能图谱与知识管理的开源利器 最近在整理个人技术栈和团队知识库时,我一直在寻找一个能直观展示技能关联、又能深度管理学习路径的工具。市面上的笔记软件要么太“平”,只能线性记录;要么太“重”,像…...

Midjourney像素艺术提示词工程:98%新手忽略的4个隐藏权重指令,实测提升风格还原度320%
更多请点击: https://intelliparadigm.com 第一章:Midjourney像素艺术提示词工程的底层逻辑重构 像素艺术在 Midjourney 中并非天然适配的生成模态,其高精度、低分辨率、强风格约束的特性与扩散模型默认的连续性渲染范式存在根本张力。要实现…...

如何在Windows 11上让经典游戏重获新生:DDrawCompat兼容性解决方案详解
如何在Windows 11上让经典游戏重获新生:DDrawCompat兼容性解决方案详解 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_m…...