STM32入门——定时器
内容为江科大STM32标准库学习记录
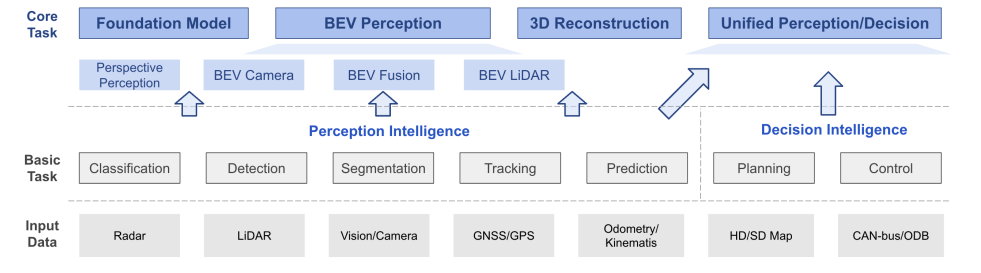
TIM简介
- TIM(Timer)定时器
- 定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
- 16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时(这里计算就是72MHz主频通过预分频继续分频(假设分频为最大65536),分频后的频率给到计数器,我们只需要知道计数器的范围为为2^16,计数加1的时间为65536/72MHz,那么最大定时就是65536/72MHz * 65536 = 59.65s)
- 不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能
- 根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型
定时器类型
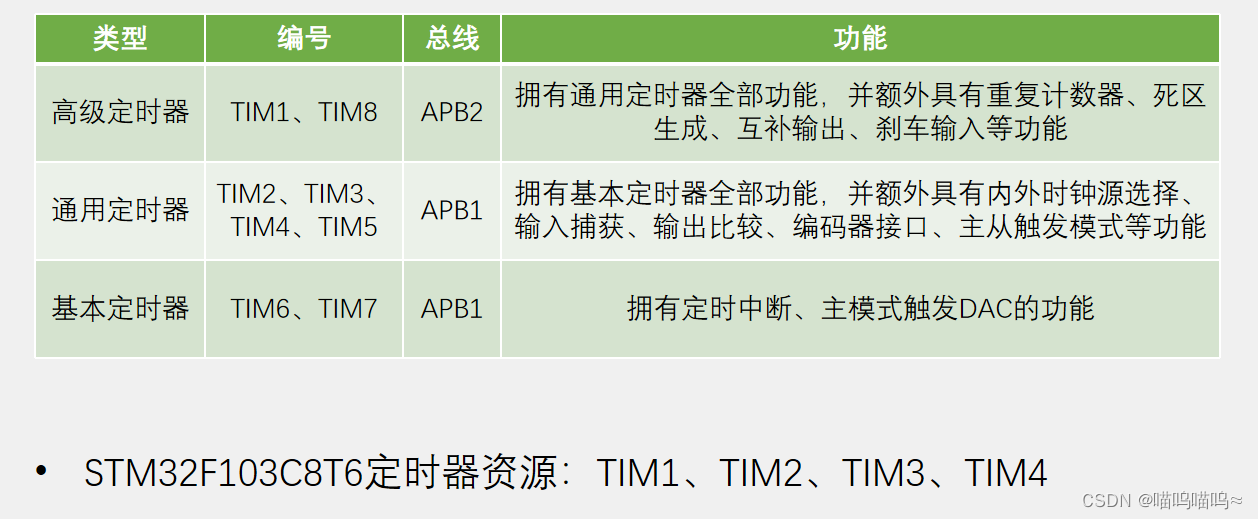
基本定时器
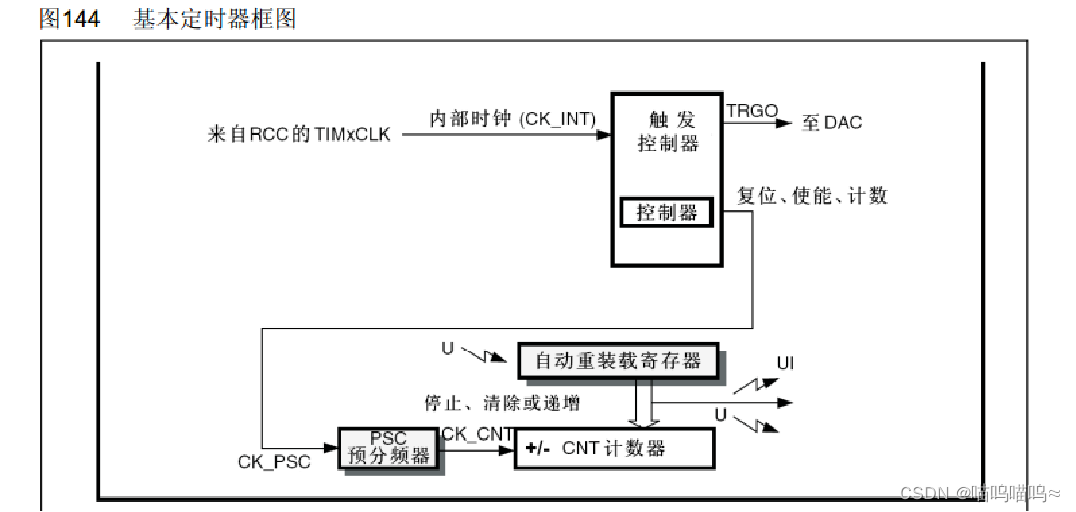
- CK_PSC:预分频器,对输入的基准频率提前进行一个分频操作,实际分频系数 = 预分频器的值+1;
- 计数器:自增,16位,0——65535
- 自动重装载寄存器:16位,存放的是写入的计数目标
- 更新中断:计数器计数自增,不断与自动重装寄存器比较,当计数自增到到计数目标,就会产生一个更新中断和更新事件,CPU更新中断并且清零计数器。
- 主模式触发DAC:可以把产生的更新事件映射到TRGO的位置,然后TRGO直接接到DAC的触发转换引脚上,这样定时器的更新就不再需要通过中断触发DAC的转换,只需要把更新事件通过主模式映射到TRGO,然后TRGO就会直接去触发DAC了,实现硬件的自动化。
通用定时器

- 通用定时器支持向上计数模式、向下计数模式和中央对齐模式。
- 内部时钟源:基本定时器只能选择内部时钟源(系统频率72MHz),通用定时器还可以选择外部时钟,外部时钟模式2(ETR外部时钟),外部时钟模式1(ERT外部时钟、ITRx其他定时器、TIx捕获通道)
高级定时器

重复次数计数器:可以实现每隔几个周期才发生一次更新事件和更新中断,相当于对更新的输出信号作了一次分频。
定时中断基本结构

预分频器时序
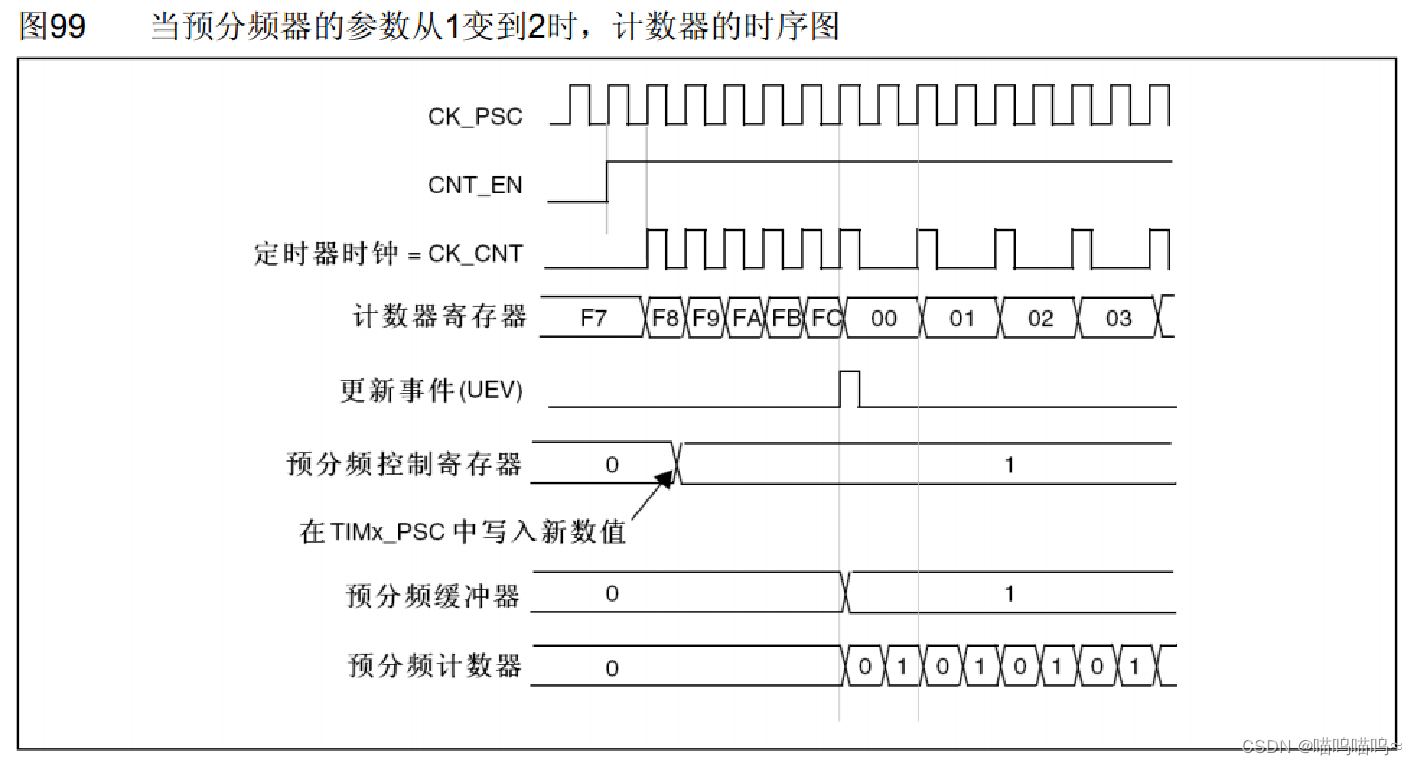
- 预分频缓冲器:可以防止在一个周期里改变了预分频值,从而导致一个周期里的频率前后不一致导致计数目标不一致。这个只有在产生了更新事件后,进入下一个周期的时候才会真正改变预分频值
- 计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)
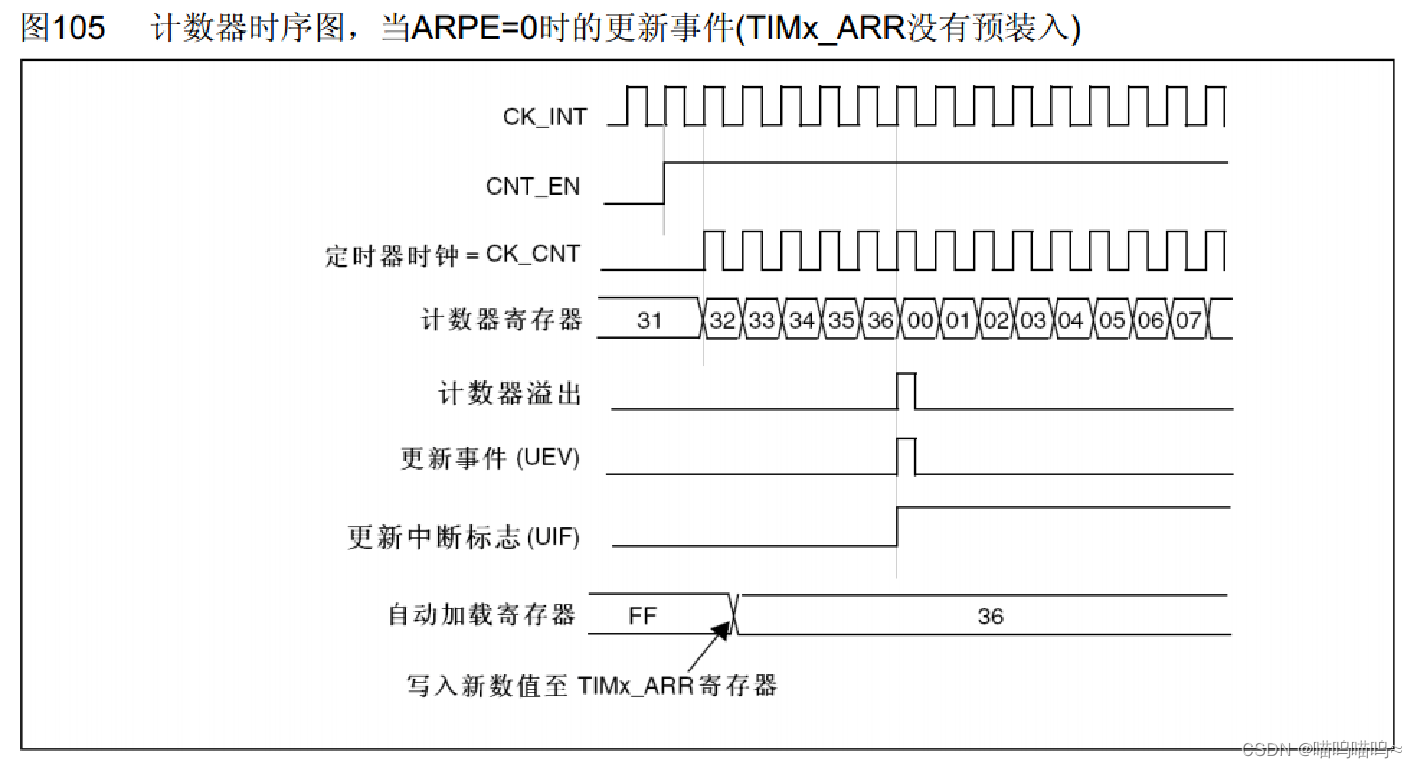
计数器时序:
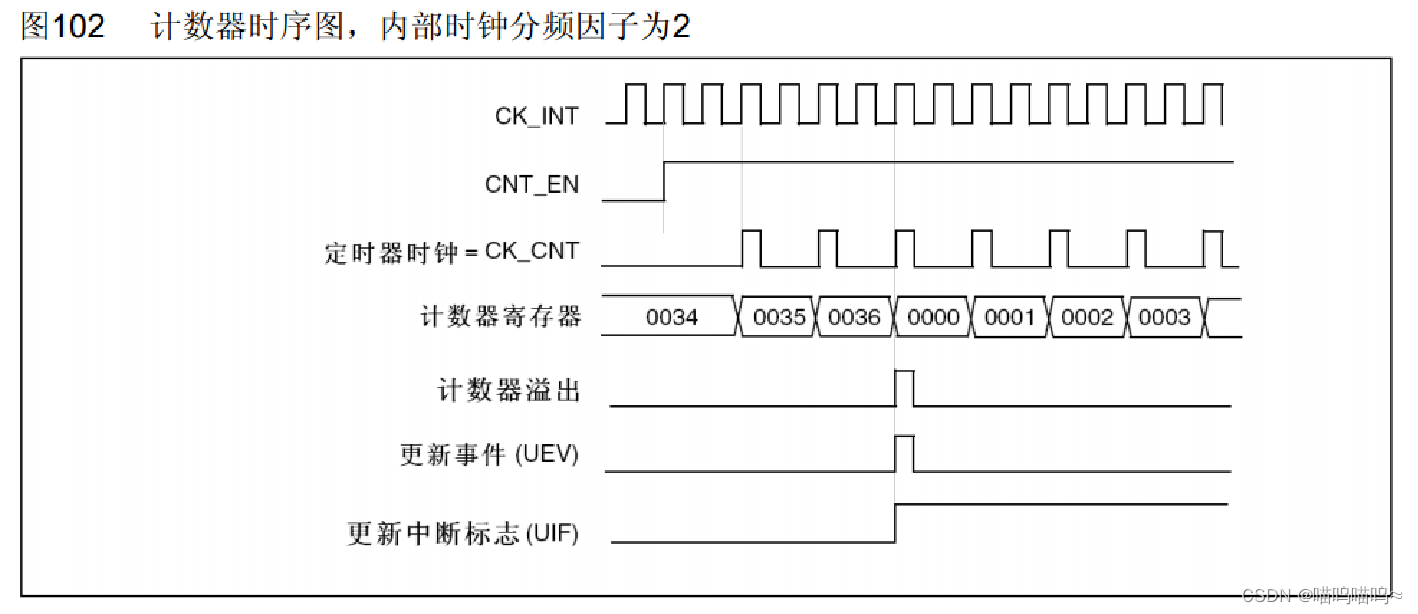
- 更新中断标志UIF:置1会申请中断,然后响应中断,需要在中断程序中手动清零
- 计数器溢出频率:CK_CNT_OV = CK_CNT / (ARR + 1)
= CK_PSC / (PSC + 1) / (ARR + 1)
计算溢出时间取倒数
计数器无预装时序
计数器有预装时序
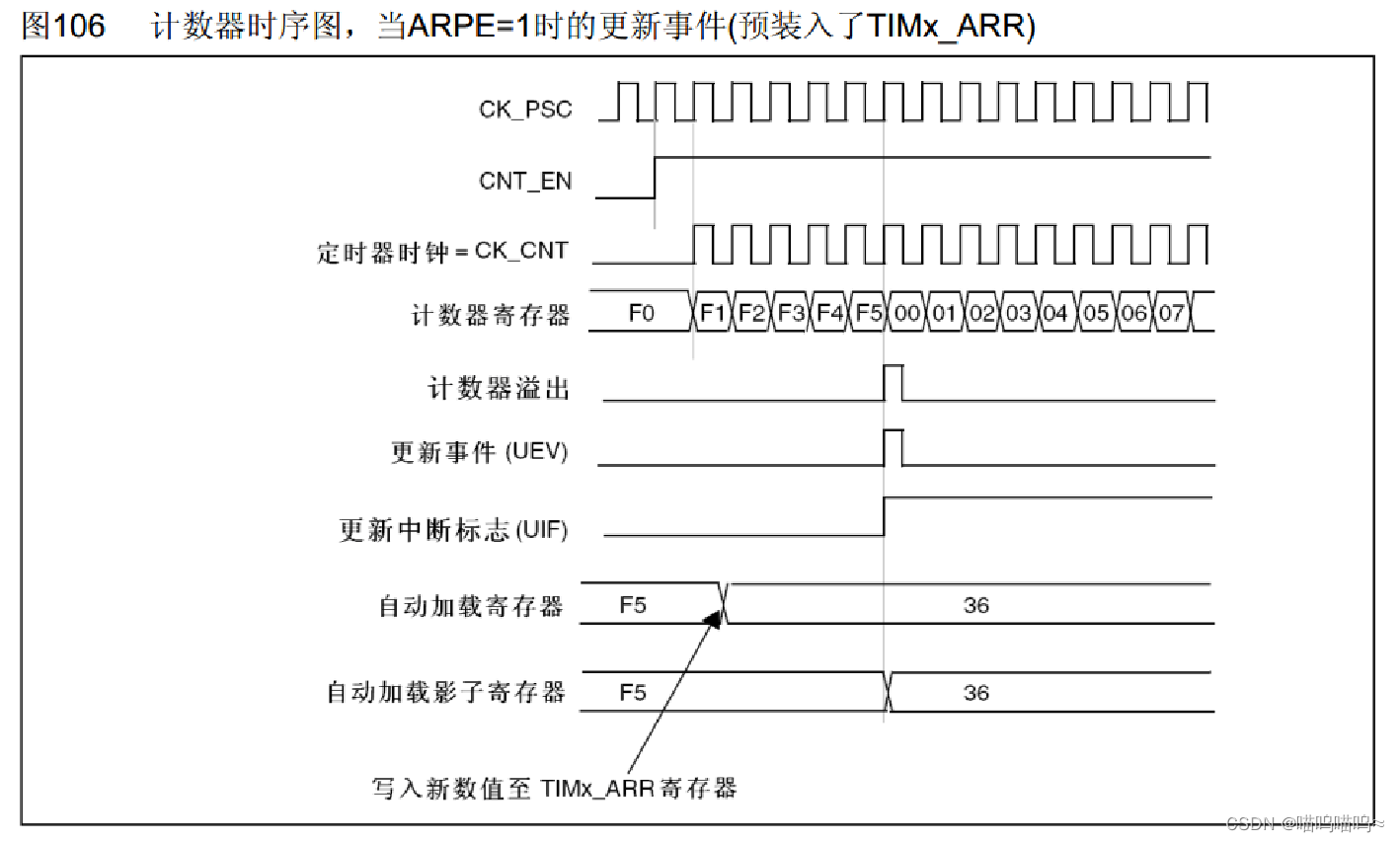
通过设置AREP位就可以选择是否使用预装功能
RCC时钟树
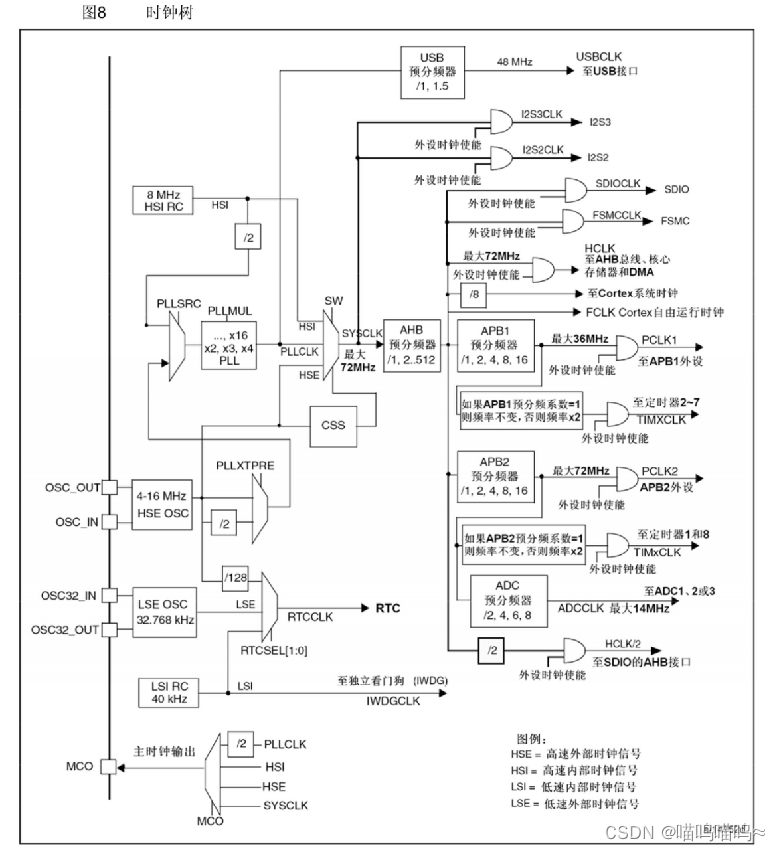
定时器的内部基准时钟都是72MHZ
定时器相关的寄存器可以看下手册
案列1:定时器每隔1s自加,使用内部时钟
#include "Timer.h"uint16_t num;void Timer_Init(void)
{//开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);//使用内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseStructure.TIM_Period = 10000 - 1;//ARR自动重装值TIM_TimeBaseStructure.TIM_Prescaler = 7200 - 1;//PCS 预分频器的值TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);TIM_ClearFlag(TIM2,TIM_FLAG_Update);//解决上电立刻先进入一次中断,手动把更新中断标志位清除一下//配置启用指定的TIM中断TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//配置优先级分组:抢占优先级和子优先级NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置NVICNVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM2,ENABLE);//启动定时器}void TIM2_IRQHandler(void)
{if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){//判断定时器中断标志num++;TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除中断定时器中断标志}}案列二:使用外部时钟计数,其实内部时钟计数就是按照内部定时自加,使用外部时钟就是计外面进来的信号(例如电平信号和边沿信号)
#include "Timer.h"uint16_t num;void Timer_Init(void)
{//开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//配置外部时钟模式2,数外面进来的信号TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,0x0F);TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseStructure.TIM_Period = 10 - 1;//ARR自动重装值TIM_TimeBaseStructure.TIM_Prescaler = 1 - 1;//PCS 预分频器的值TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);TIM_ClearFlag(TIM2,TIM_FLAG_Update);//解决上电立刻先进入一次中断,手动把更新中断标志位清除一下//配置启用指定的TIM中断TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//配置优先级分组:抢占优先级和子优先级NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置NVICNVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM2,ENABLE);//启动定时器}uint16_t Timer_GetCounter(void)
{return TIM_GetCounter(TIM2);}void TIM2_IRQHandler(void)
{if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){//判断定时器中断标志num++;TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除中断定时器中断标志}}输出比较简介
- OC(Output Compare)输出比较
- 输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
- 每个高级定时器和通用定时器都拥有4个输出比较通道
- 高级定时器的前3个通道额外拥有死区生成和互补输出的功能
PWM简介
-
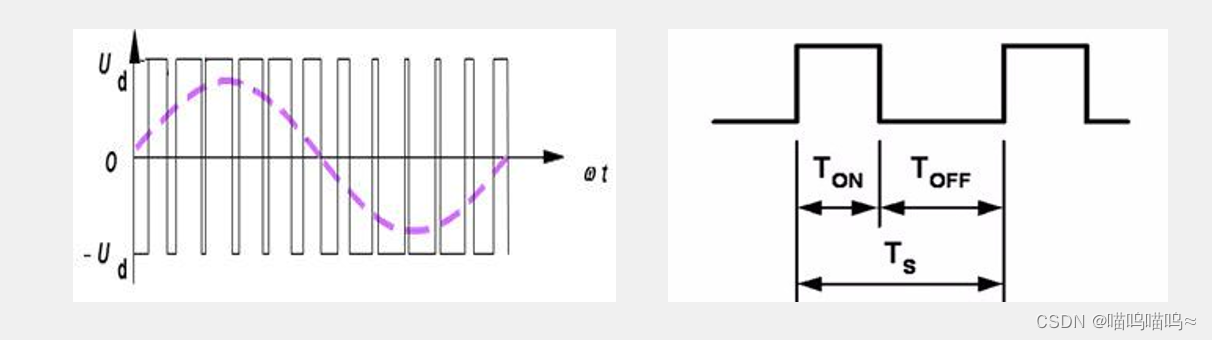
PWM(Pulse Width Modulation)脉冲宽度调制
-
在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
-
PWM参数:
频率 = 1 / TS 占空比 = TON / TS 分辨率 = 占空比变化步距
输出比较通道(通用)
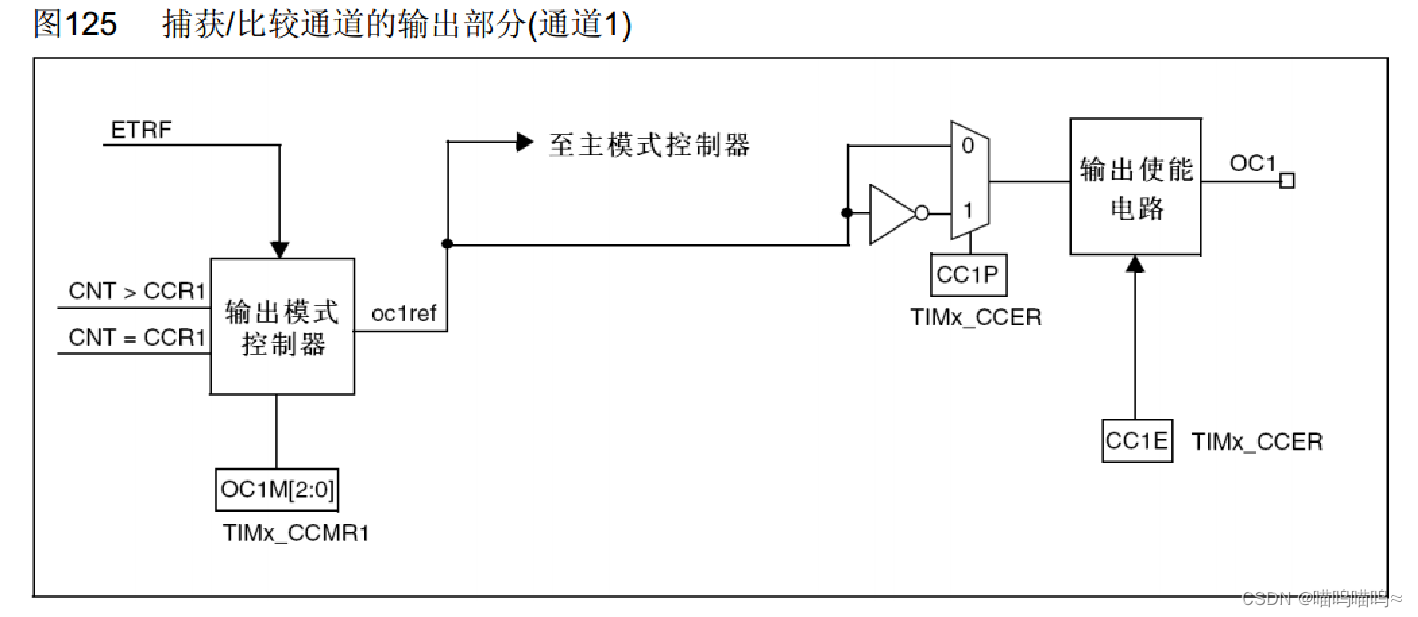
输出模式控制器:是CNT和CCR的大小关系,输出的是REF的高低电平
具体看下面输出比较模式

置有效电平:可以理解为高电平
置无效电平:可以理解为低电平
PWM基本结构
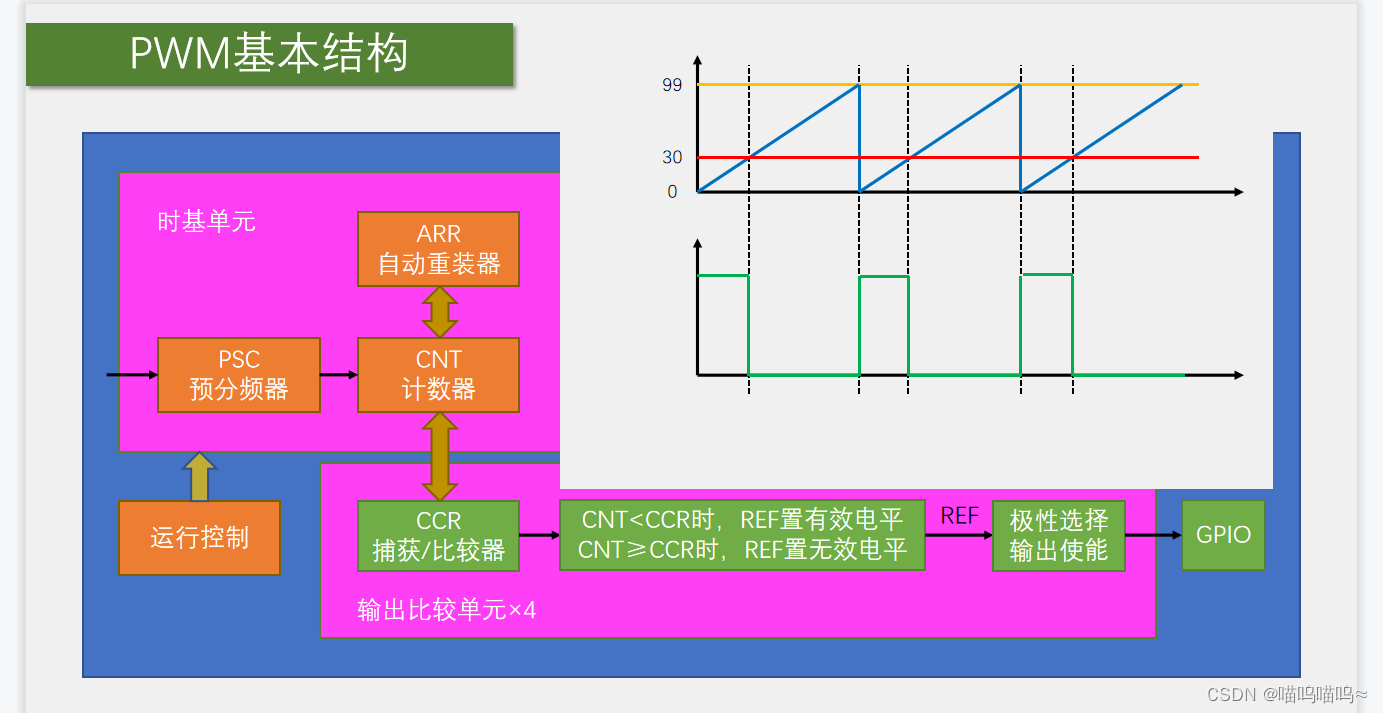
黄色线:ARR的值
红色线:CCR的值
蓝色线:CNT的计数值
绿色线为REF输出,极性是否翻转取决于极性选择了,最终通向GPIO口
参数计算
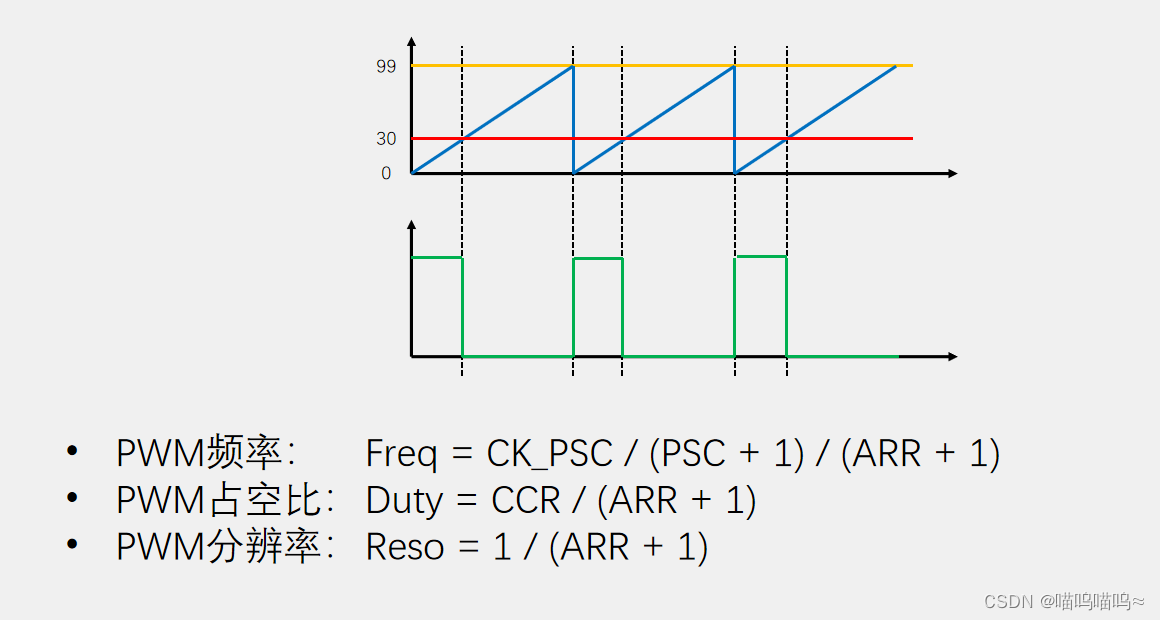
上图看出PWM的频率等于计数器的更新频率
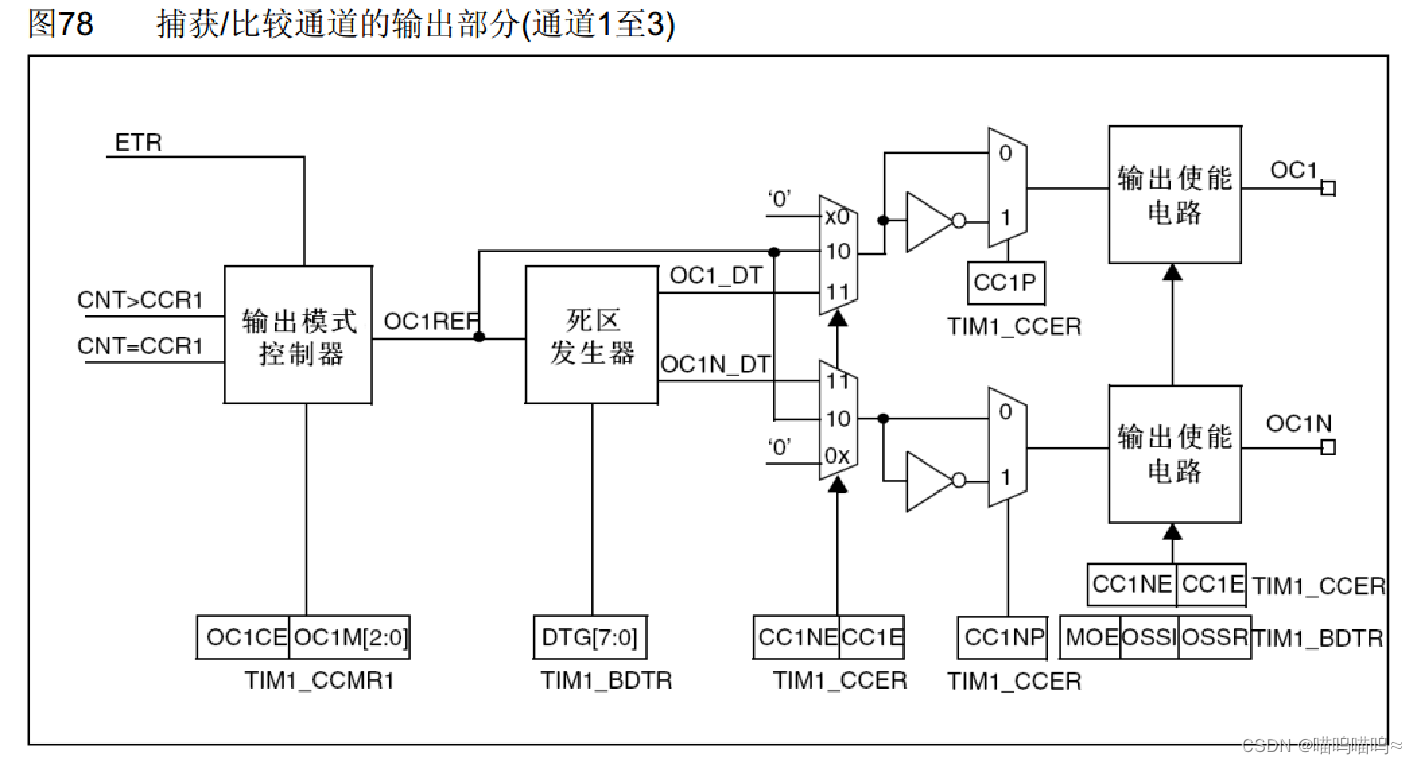
输出比较通道(高级)
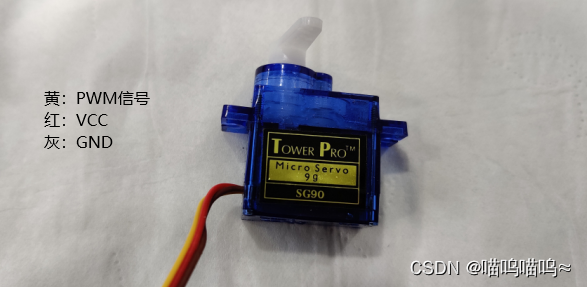
舵机简介
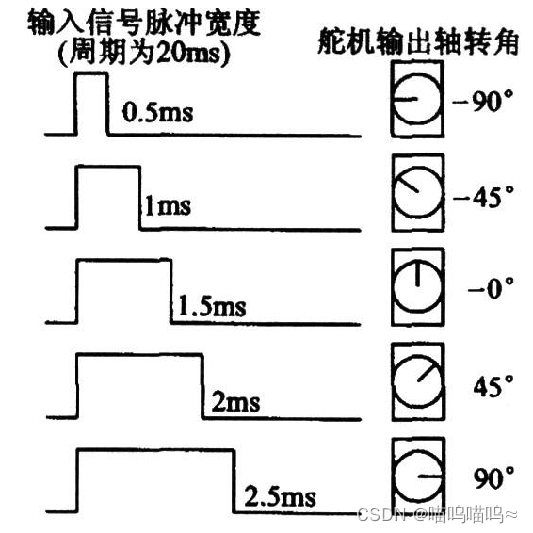
- 舵机是一种根据输入PWM信号占空比来控制输出角度的装置
- 输入PWM信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms
0.5ms-------------(-)90度; 2.5%
1.0ms------------(-)45度; 5.0%
1.5ms------------0度; 7.5%
2.0ms-----------45度; 10.0%
2.5ms-----------90度; 12.5%
直流电机及驱动简介
- 直流电机是一种将电能转换为机械能的装置,有两个电极,当电极正接时,电机正转,当电极反接时,电机反转
- 直流电机属于大功率器件,GPIO口无法直接驱动,需要配合电机驱动电路来操作
- TB6612是一款双路H桥型的直流电机驱动芯片,可以驱动两个直流电机并且控制其转速和方向
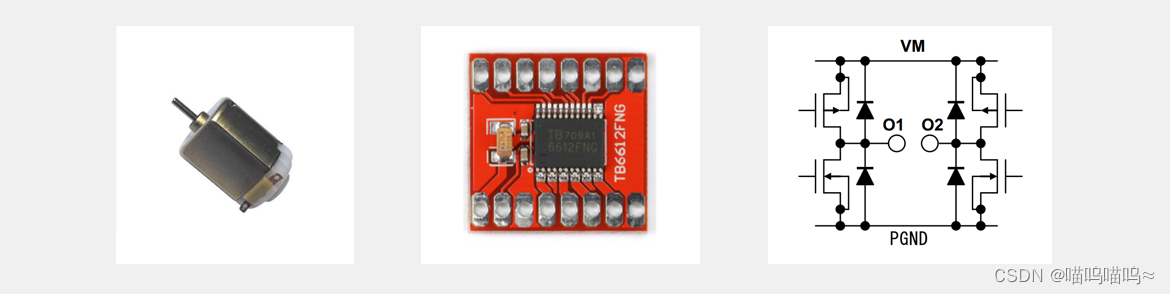
硬件电路
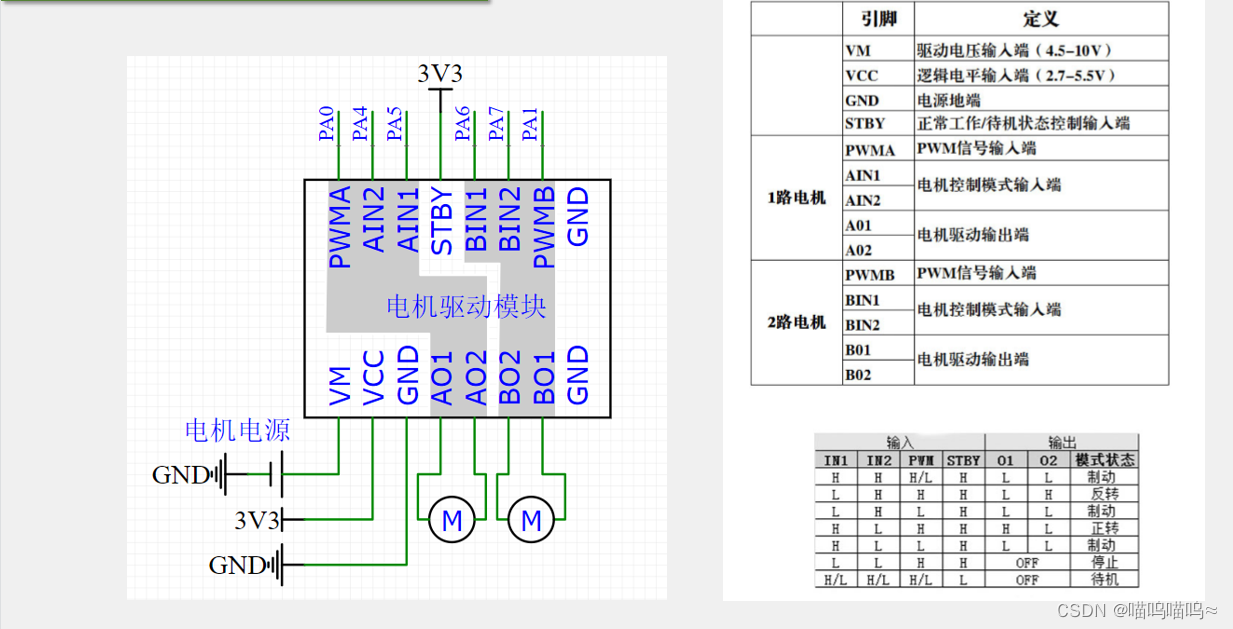
这里的就是IN1和IN2控制正反转,PWM控制速度
左转:左边轮子不动,右边轮子往前走
右转:右边轮子不动,左边轮子往前走
案例一:呼吸灯,通过改变CCR寄存器的值,改变占空比
#include "pwm.h"void PWM_Init(void)
{//开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//选择内部时钟TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;//ARR自动重装值TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1;//PCS 预分频器的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//给结构体赋予初始值,再更改需要的值TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//指定TIM模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //指定输出极性。 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//指定TIM输出比较状态TIM_OCInitStructure.TIM_Pulse = 0;//CCR寄存器的值TIM_OC1Init(TIM2,&TIM_OCInitStructure);//初始化TIM2 Channel1TIM_Cmd(TIM2,ENABLE);//启动定时器}void Set_Compare1(uint16_t Set_Compare1)
{TIM_SetCompare1(TIM2,Set_Compare1);}LED_PWM_Init();PWM_Init();while(1){for(i=0;i<=100;i++){Set_Compare1(i);Delay_ms(10);OLED_ShowNum(2,3,i,5);}for(i=0;i<=100;i++){Set_Compare1(100-i);Delay_ms(10);OLED_ShowNum(2,3,(100-i),5);}}}
引脚端口复用
打开AFIO时钟,再使用AFIO重映射外设复用的引脚,如果重映射的GPIO是调试端口,需要解除调试功能,变为普通的GPIO才可以正常使用
//开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//IO复用RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);//重映射GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//解除JTAG的调试端口GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);
案例二:控制舵机
#include "pwm.h"void PWM_Init(void)
{//开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//选择内部时钟TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1;//ARR自动重装值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//PCS 预分频器的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//给结构体赋予初始值,再更改需要的值TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//指定TIM模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //指定输出极性。 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//指定TIM输出比较状态TIM_OCInitStructure.TIM_Pulse = 0;//CCR寄存器的值TIM_OC1Init(TIM2,&TIM_OCInitStructure);//初始化TIM2 Channel1TIM_Cmd(TIM2,ENABLE);//启动定时器}void Set_Compare1(uint16_t Compare)
{//Set_Compare1 = Set_Compare1*20;TIM_SetCompare1(TIM2,Compare);}void Servo_SetAngle(uint16_t Angle)
{uint16_t reNum;reNum = (Angle*2000)/180 + 500;Set_Compare1(reNum);}案例三:控制电机
#include "motor.h"
void Motor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;PWM_Init();
}void Motor_SetSpeed(int8_t speed)
{if(speed >= 0){GPIO_SetBits(GPIOA,GPIO_Pin_4);GPIO_ResetBits(GPIOA,GPIO_Pin_5);//正转Set_Compare1(speed);//控制占空比来调整速度}else {GPIO_SetBits(GPIOA,GPIO_Pin_5);GPIO_ResetBits(GPIOA,GPIO_Pin_4);//反转Set_Compare1(speed);//控制占空比来调整速度}}
第三部分:输入捕获
输入捕获简介
- IC(Input Capture)输入捕获
- 输入捕获模式下,当通道输入引脚出现指定电平跳变时,当前CNT的值将被锁存到CCR中,可用于测量PWM波形的频率、占空比、脉冲间隔、电平持续时间等参数
- 每个高级定时器和通用定时器都拥有4个输入捕获通道
- 可配置为PWMI模式,同时测量频率和占空比
- 可配合主从触发模式,实现硬件全自动测量
频率的定义:在时间T内出现N个重复的周期,那么f = N/T
频率测量
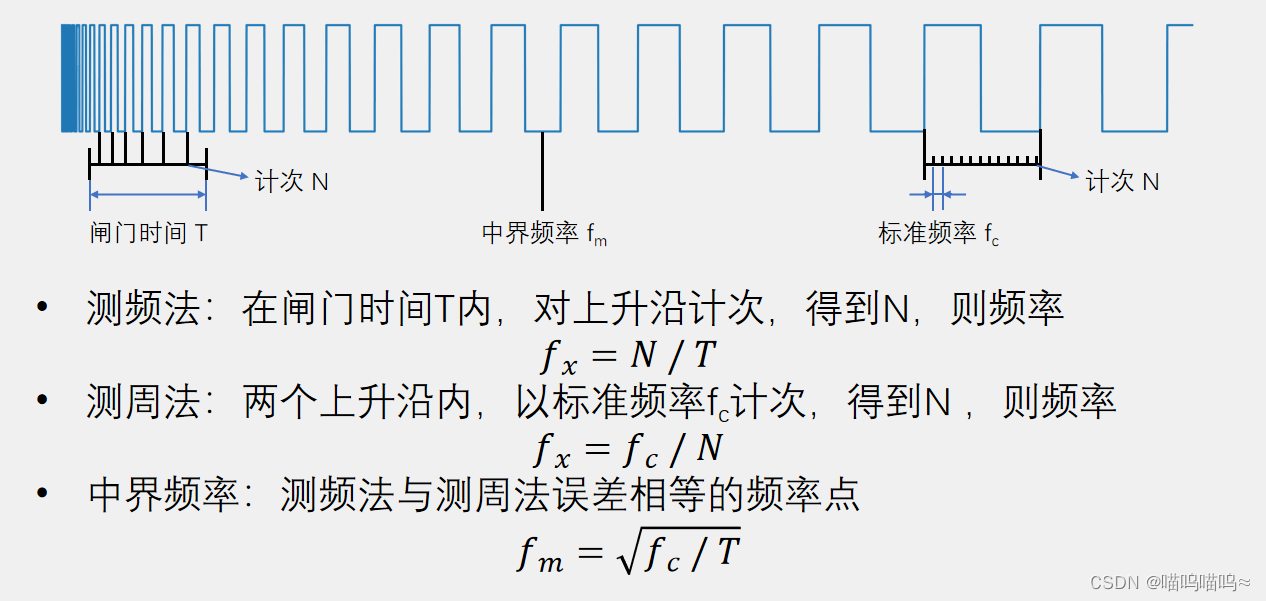
测频法适合测量高频信号,测周法适合测量低频信号,以中界频率为界限。
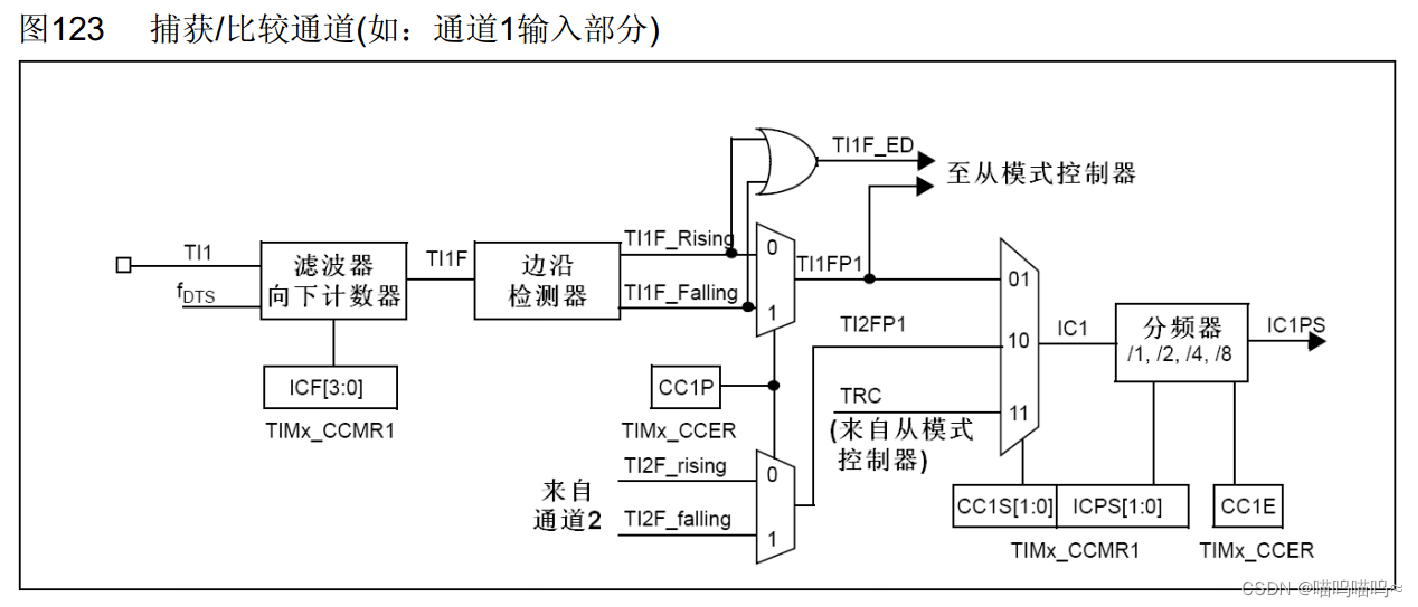
输入捕获通道
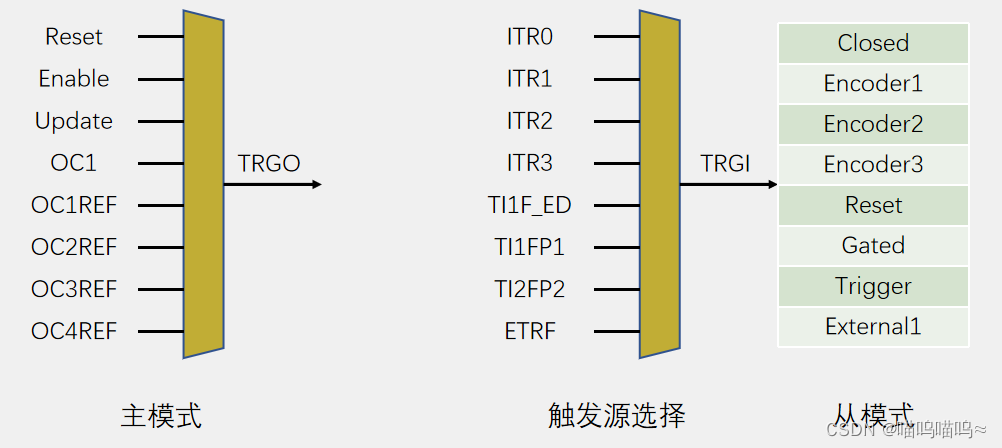
主从触发模式
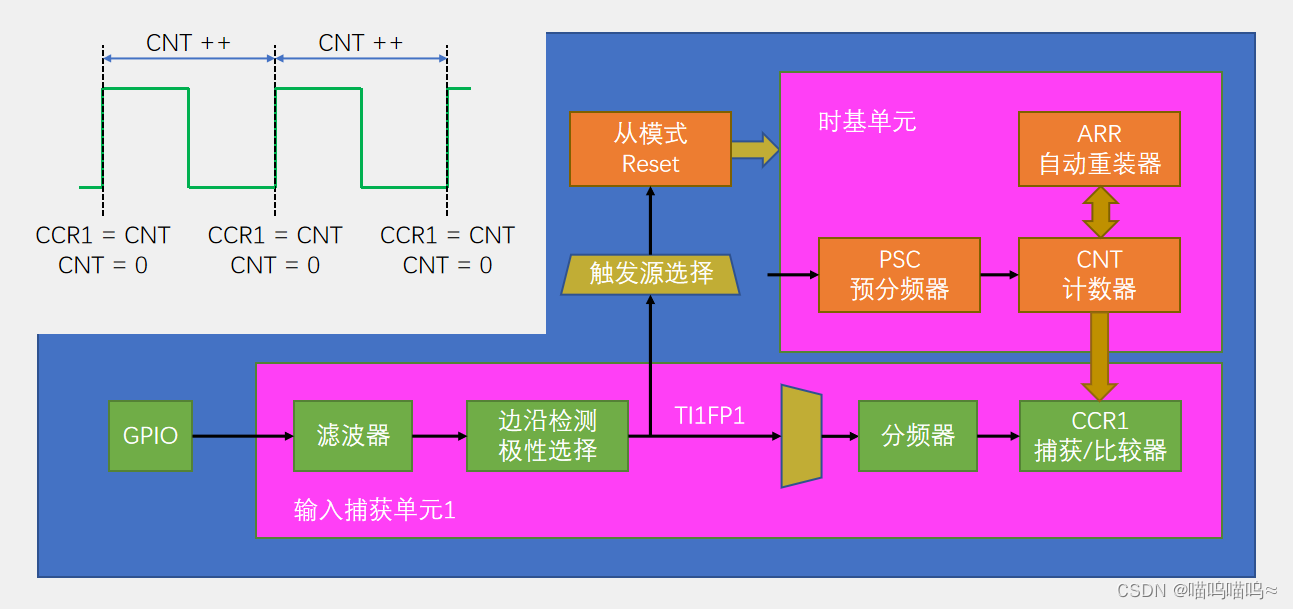
输入捕获基本结构
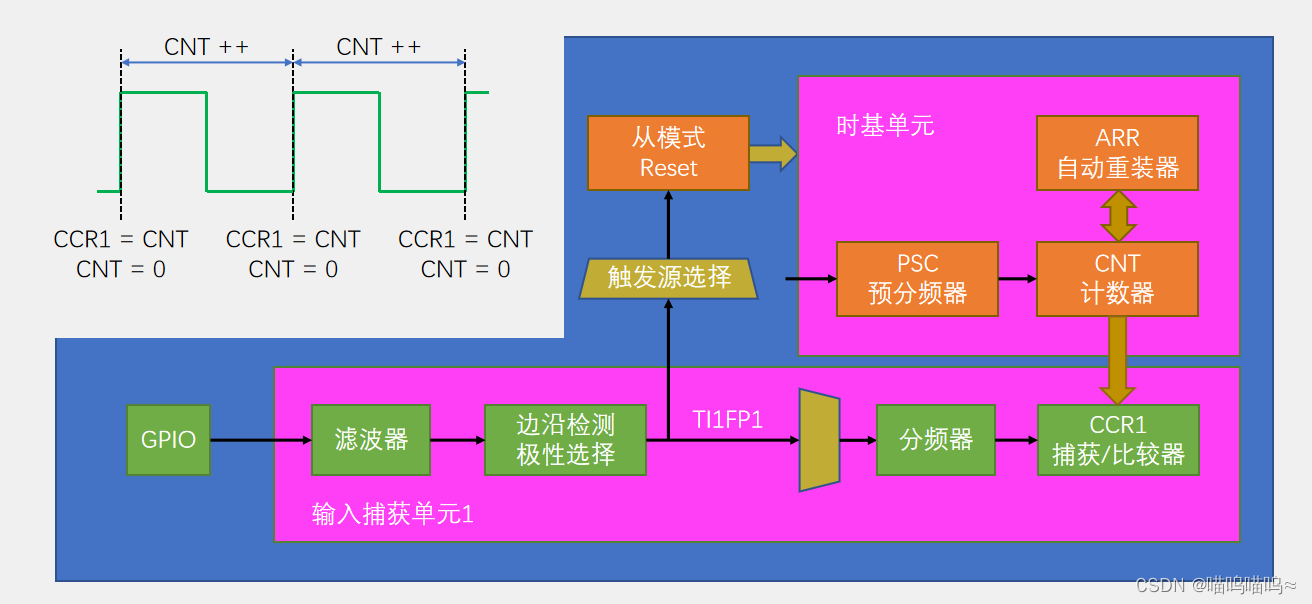
输入捕获基本结构
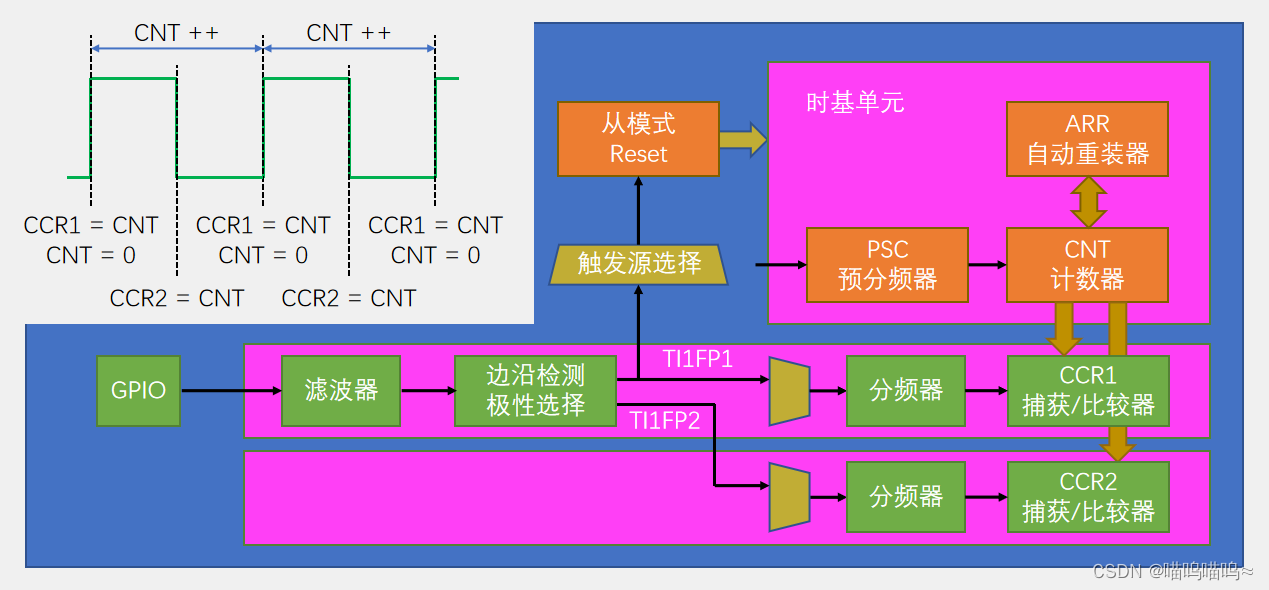
PWMI基本结构
案例一:PA0输出pwm,使用PA6捕获输入pwm,测量频率
#include "IC.h"void IC_Init(void)
{//开启对应时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//配置GPIOGPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//配置时基单元TIM_InternalClockConfig(TIM3);//选择内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 72 -1;//PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);//输入捕获配置TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;TIM_ICInitStructure.TIM_ICFilter = 0xF;//指定输入捕获过滤器。TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//指定输入信号的活动边缘TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//指定输入捕获预calerTIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//指定输入TIM_ICInit(TIM3,&TIM_ICInitStructure);//根据指定初始化TIM外设TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);//选择输入触发器源TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);//选择TIMx从模式TIM_Cmd(TIM3,ENABLE);
}//f = 标准频率/计时次数;目前标准频率为1MHz
uint32_t Get_Frequency(void)
{return (1000000/TIM_GetCapture1(TIM3));
}
案例二:PA0输出pwm,使用PA6捕获输入pwm,测量频率和占空比
#include "IC2.h"void IC2_Init(void)
{//开启对应时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//配置GPIOGPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//配置时基单元TIM_InternalClockConfig(TIM3);//选择内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//计数器模式TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 72 -1;//PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);//输入捕获配置TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;TIM_ICInitStructure.TIM_ICFilter = 0xF;//指定输入捕获过滤器。TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//指定输入信号的活动边缘,上升沿TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//指定输入捕获预calerTIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//指定输入,这里直接TIM_ICInit(TIM3,&TIM_ICInitStructure);//根据指定初始化TIM外设TIM_PWMIConfig(TIM3,&TIM_ICInitStructure);//传入配置好的通道1,就可以配置和通道1的相反配置TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);//选择输入触发器源TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);//选择TIMx从模式TIM_Cmd(TIM3,ENABLE);
}//f = 标准频率/计时次数;目前标准频率为1MHz
uint32_t Get_Frequency2(void)
{return (1000000/TIM_GetCapture1(TIM3));
}uint32_t Get_Duty(void)
{return ((TIM_GetCapture2(TIM3)+1)*100/TIM_GetCapture1(TIM3));
}
编码器接口简介
- Encoder Interface 编码器接口
- 编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度
- 每个高级定时器和通用定时器都拥有1个编码器接口
- 两个输入引脚借用了输入捕获的通道1和通道2
正交编码器

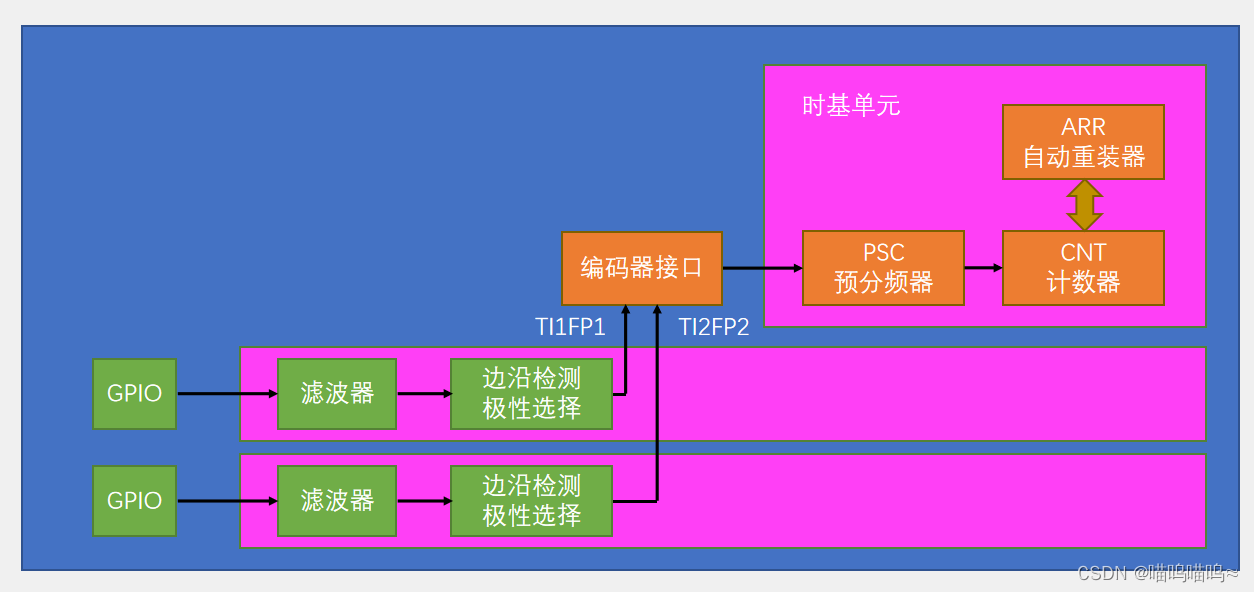
编码器接口基本结构
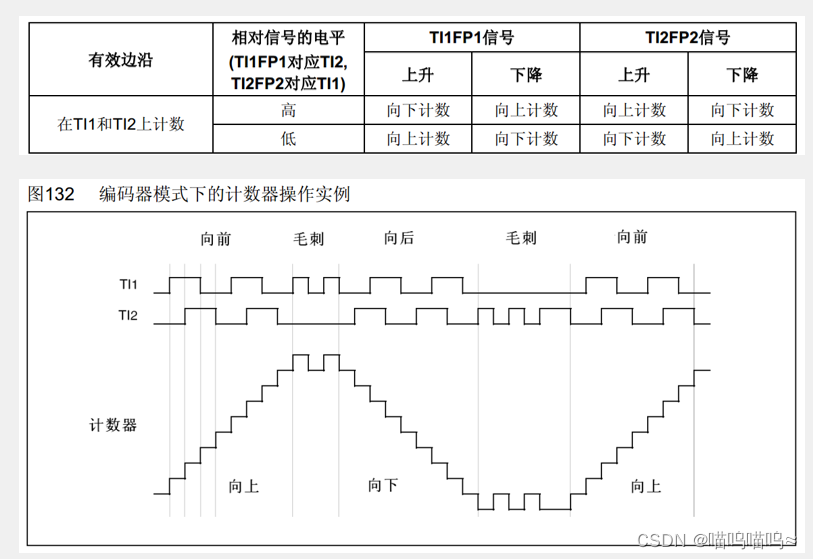
工作模式
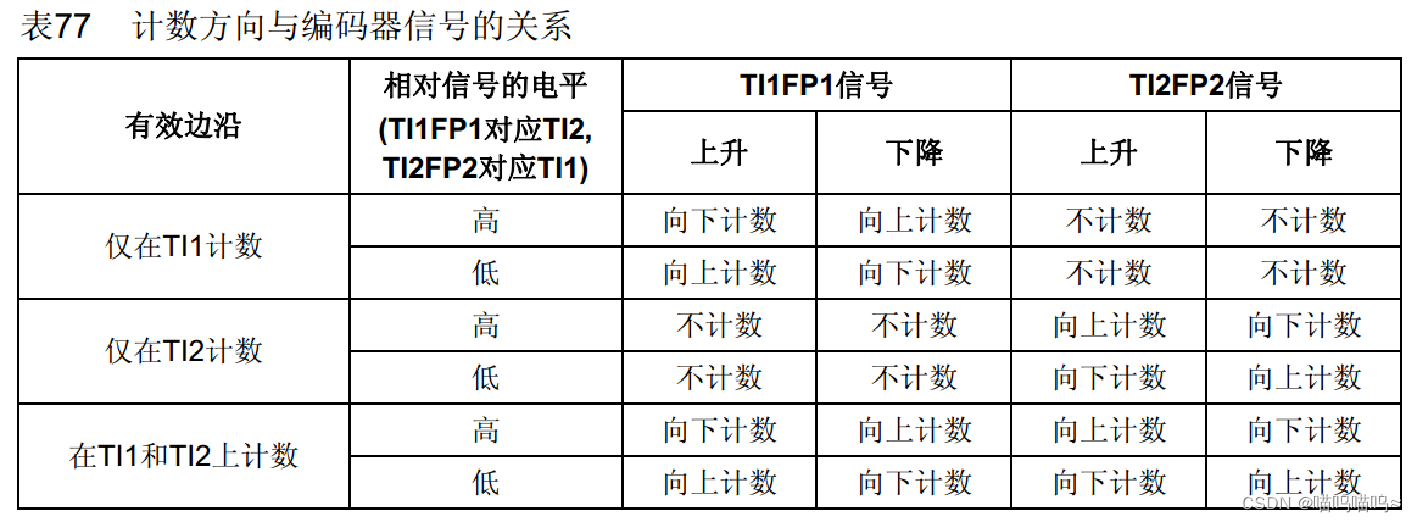
实例(均不反相)
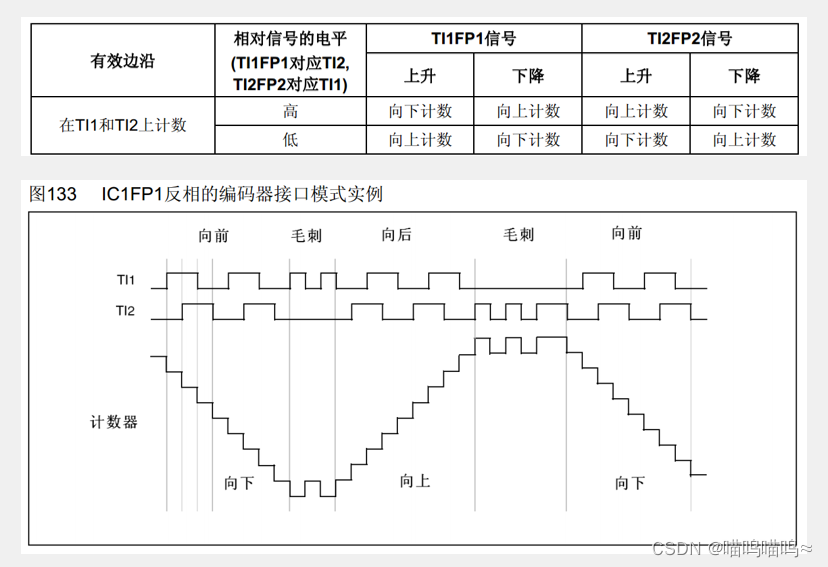
实例(TI1反相)
案例一:编码器接口测速
A相——PA6 B相——PA7 对应TIM3的通道1和通道2
#include "Encoder.h"void Encoder_Init(void)
{//开启对应时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIO初始化GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 65506 - 1;//ARR 自动重装值TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);//输入捕获配置TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;TIM_ICInitStructure.TIM_ICFilter = 0xF;TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;TIM_ICInit(TIM3,&TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;TIM_ICInitStructure.TIM_ICFilter = 0xF;TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;TIM_ICInit(TIM3,&TIM_ICInitStructure);//编码器接口配置TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);TIM_Cmd(TIM3,ENABLE);//开启定时器
}uint16_t Encoder_Get(void)
{uint16_t temp;TIM_GetCounter(TIM3);//获取CNT的值TIM_SetCounter(TIM3,0);//CNT清0
}相关文章:
STM32入门——定时器
内容为江科大STM32标准库学习记录 TIM简介 TIM(Timer)定时器定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时&…...

企业工商信息:知识产权出质
一、出质是什么?质权是什么? 出质,作为一种物权行为,是指将个人或企业所拥有的财产权益移交给他人作为抵押,以获得资金支持。这一概念在商业活动中扮演着重要的角色,为企业创造了融资渠道。特别是在知识密…...

batch_softmax_loss
每个用户抽取一定数量的困难负样本,然后ssm def batch_softmax_loss_neg(self, user_idx, rec_user_emb, pos_idx, item_emb):user_emb rec_user_emb[user_idx]product_scores torch.matmul(F.normalize(user_emb, dim1), F.normalize(item_emb, dim1).transpose(…...

刘汉清:从生活到画布,宠物成为灵感源泉
出生于中国镇江的艺术家刘汉清,其作品展现出他对日常生活的深入洞察力,以及对美的独特理解。他的作品通常没有视觉参考,而是通过对他周围环境的理解,尤其是他的宠物,来进行创作。 在刘汉清的创作过程中,他…...
【LeetCode】240.搜索二维矩阵Ⅱ
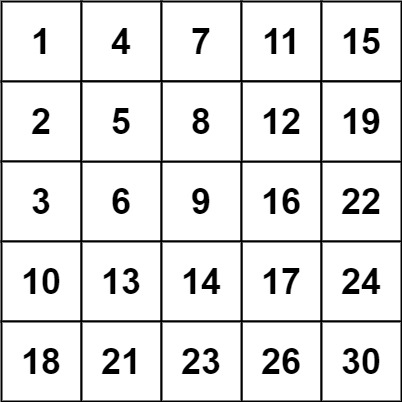
题目 编写一个高效的算法来搜索 m x n 矩阵 matrix 中的一个目标值 target 。该矩阵具有以下特性: 每行的元素从左到右升序排列。每列的元素从上到下升序排列。 示例 1: 输入:matrix [[1,4,7,11,15],[2,5,8,12,19],[3,6,9,16,22],[10,13,…...

SED正则表达式中[方括号]的特殊处理
今天被这个方括号懵晕了,特此记录 例如: 去除输入字符串“1[2.3]4[ab,c]”中的所有方括号和逗号: $ echo "1[2.3]4[ab,c]"|sed -e "s/[,\]\[]//g" 1[2.3]4[ab,c] It doesnt work! 原因:Regular Expressi…...

Android 音频开发
在Android平台上进行音频开发,您需要掌握以下关键知识点: Android平台基础知识:熟悉Android操作系统的基本架构、组件和应用开发的基本概念。 音频API:了解Android提供的音频相关API,主要包括android.media.AudioReco…...

Java8新特性,Lambda,Stream流
Java8新特性,Lambda,Stream流 Java8版本在2014年3月18日发布,为Java语言添加了很多重要的新特性。新特性包括:Lambda表达式、方法引用、默认方法、新的时间日期API、Stream API、Optional类等等。这些新特性大大增强了Java语言的表达能力,使…...

模型训练之train.py代码解析
题目 作者:安静到无声 个人主页 from __future__ import absolute_import from __future__ import division from __future__ import print_function这段代码使用了Python 2.x的__future__模块来导入Python 3.x的一些特性。在Python 2.x中,使用print语句来输出内容,而在Py…...

linux 复习
vim 使用 一般模式 、 命令模式、编辑模式 esc 进入一般模式 i 进入编辑模式 shift: 进入命令模式 yy p 复制粘贴 5yy 复制当前开始的5行 dd 删除 5dd 删除当前开始的5行 u撤销操作 ctrlr 恢复 shiftg 滚动最底部 gg 滚动最顶 输入数字 然后shiftg 跳转到指定行 用户操作…...

C语言刷题------(2)
C语言刷题——————(2) 刷题网站:题库 - 蓝桥云课 (lanqiao.cn) First Question:时间显示 题目描述 小蓝要和朋友合作开发一个时间显示的网站。 在服务器上,朋友已经获取了当前的时间,用一个整数表…...

JVM 之 OopMap 和 RememberedSet
前几天看周志明的《深入 Java 虚拟机》,感觉对 OopMap 和 RememberedSet 的介绍,看起来不太容易理解清楚。今天查了一些资料,并结合自己的一些猜想,把对这两种数据结构的理解写出来。目的只是为了简单易懂,而且多有推测…...

Original error: gsmCall method is only available for emulators
在夜神模拟器执行报错 self.driver.make_gsm_call(5551234567, GsmCallActions.CALL)意思是gsmCall这个命令不支持,只支持下面这些命令 selenium.common.exceptions.UnknownMethodException: Message: Unknown mobile command "gsmCall". Only shell,exe…...
React Native从文本内容尾部截取显示省略号
<Textstyle{styles.mMeNickname}ellipsizeMode"tail"numberOfLines{1}>{userInfo.nickname}</Text> 参考链接: https://www.reactnative.cn/docs/text#ellipsizemode https://chat.xutongbao.top/...

机器学习笔记之优化算法(十一)凸函数铺垫:梯度与方向导数
机器学习笔记之优化算法——凸函数铺垫:梯度与方向导数 引言回顾:偏导数方向余弦方向导数方向导数的几何意义方向导数的定义 方向导数与偏导数之间的关联关系证明过程 梯度 ( Gradient ) (\text{Gradient}) (Gradient) 引言 本节作为介绍凸函数的铺垫&a…...
探究Vue源码:mustache模板引擎(11) 递归处理循环逻辑并收尾算法处理
好 在上文 探究Vue源码:mustache模板引擎(10) 解决不能用连续点符号找到多层对象问题,为编译循环结构做铺垫 我们解决了js字符串没办法通过 什么点什么拿到对象中的值的问题 这个大家需要记住 因为这个方法的编写之前是当做面试题出现过的 那么 本文 我们就要去写上…...

STM32 CubeMX USB_CDC(USB_转串口)
STM32 CubeMX STM32 CubeMX 定时器(普通模式和PWM模式) STM32 CubeMX一、STM32 CubeMX 设置USB时钟设置USB使能UBS功能选择 二、代码部分添加代码实验效果 printf发…...
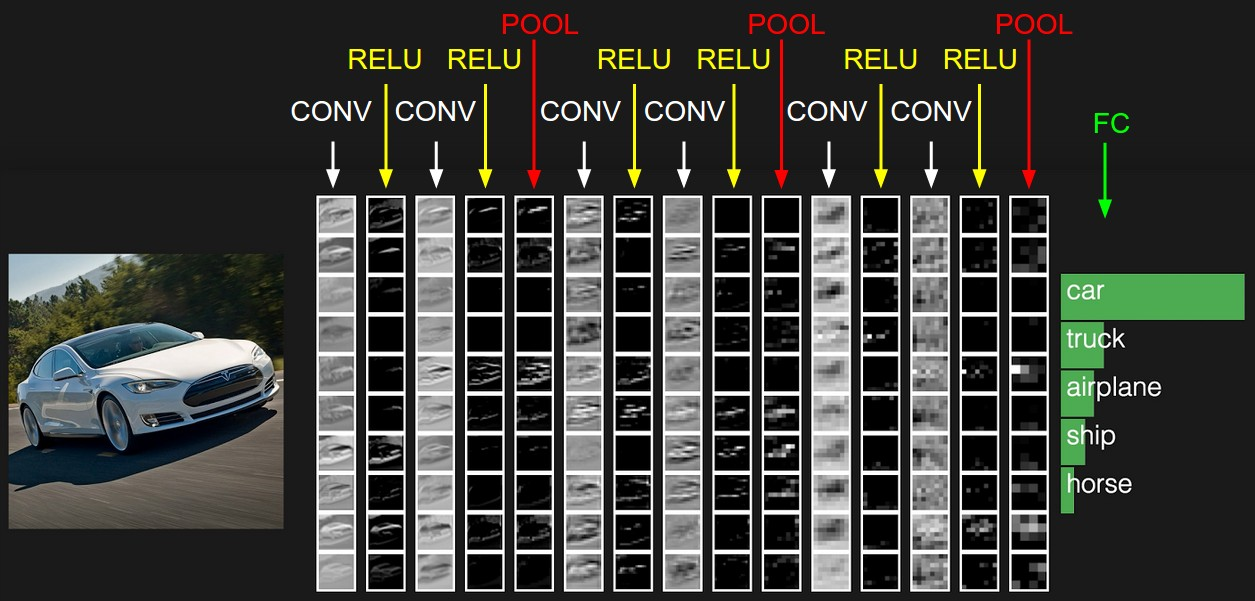
机器学习——卷积神经网络基础
卷积神经网络(Convolutional Neural Network:CNN) 卷积神经网络是人工神经网络的一种,是一种前馈神经网络。最早提出时的灵感来源于人类的神经元。 通俗来讲,其主要的操作就是:接受输入层的输入信息&…...
端到端自动驾驶前沿论文盘点(pdf+代码)
现在的自动驾驶,大多数还是采用的模块化架构,但这种架构的缺陷十分明显:在一个自动驾驶系统里,可能会包含很多个模型,每个模型都要专门进行训练、优化、迭代,随着模型的不断进化,参数量不断提高…...
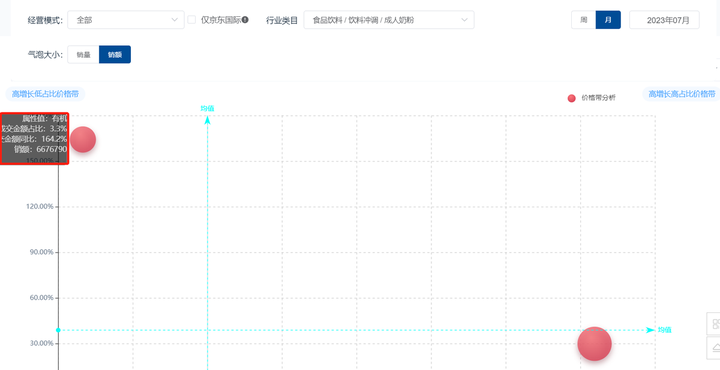
2023年中期奶粉行业分析报告(京东数据开放平台)
根据国家统计局和民政部数据公布,2022年中国结婚登记数创造了1980年(有数据公布)以来的历史新低,共计683.3万对。相较于2013年巅峰时期的数据,2022年全国结婚登记对数已接近“腰斩”。 2023年“520”期间的结婚登记数…...

告别低效:用快马ai一键生成can总线数据分析与统计脚本
在汽车电子和嵌入式系统开发中,CAN总线数据的分析是个高频需求。无论是调试车载网络问题,还是优化通信性能,都离不开对海量CAN帧数据的处理。但手动写解析脚本不仅耗时,还容易遗漏关键细节。最近我发现用InsCode(快马)平台的AI辅助…...

Jetson Nano实战:FFmpeg与Nginx的RTMP推流配置全解析
1. Jetson Nano与RTMP推流基础认知 第一次接触Jetson Nano做视频推流时,我对着这块信用卡大小的开发板研究了整整三天。这块搭载了128核NVIDIA Maxwell GPU的小家伙,其实是个隐藏的视频处理高手。RTMP协议就像快递公司的"当日达"服务ÿ…...

软件测试之压力测试总结
🍅 点击文末小卡片,免费获取软件测试全套资料,资料在手,涨薪更快 一、什么是压力测试软件测试中:压力测试(Stress Test),也称为强度测试、负载测试。压力测试是模拟实际应用的软硬件…...

Ostrakon-VL终端惊艳效果:终端打印支持ANSI颜色码高亮关键信息
Ostrakon-VL终端惊艳效果:终端打印支持ANSI颜色码高亮关键信息 1. 像素特工终端概览 Ostrakon-VL终端是一款专为零售与餐饮场景设计的智能扫描工具,基于Ostrakon-VL-8B多模态大模型开发。与传统工业级UI不同,它采用了独特的8-bit像素艺术风…...
)
保姆级教程:用Python+OpenCV搞定汽车360全景拼接(附C++移植思路)
从零构建汽车360全景系统:PythonOpenCV实战与C工程化指南 当你第一次坐上驾驶座,启动车辆时,中控屏上突然展现出车辆周围无死角的鸟瞰视图——这就是现代汽车360全景系统带来的神奇体验。作为提升驾驶安全性和便利性的关键技术,它…...

c++阿克曼函数详解
不爱吃饭的蓝胖子要开始整活了!!!大家好,我是蓝胖子!好久不见,倍感思念!今天带来的是--C阿克曼函数~~希望你能看到最后,有惊喜哈!正片开始 ——————————————…...

Z-Image-Turbo-辉夜巫女显存优化技巧:在低配置GPU上运行大模型的实战方法
Z-Image-Turbo-辉夜巫女显存优化技巧:在低配置GPU上运行大模型的实战方法 你是不是也遇到过这种情况:看到一个效果很棒的图像生成模型,比如Z-Image-Turbo-辉夜巫女,兴冲冲地准备跑起来试试,结果一运行就提示“CUDA ou…...

颠覆式剧本创作:Dramatron如何用AI重构故事生成流程
颠覆式剧本创作:Dramatron如何用AI重构故事生成流程 【免费下载链接】dramatron Dramatron uses large language models to generate coherent scripts and screenplays. 项目地址: https://gitcode.com/gh_mirrors/dr/dramatron 痛点直击:剧本创…...

Intv_AI_MK11跨平台开发体验:在Windows WSL2中无缝使用GPU进行模型调试
Intv_AI_MK11跨平台开发体验:在Windows WSL2中无缝使用GPU进行模型调试 1. 为什么选择WSL2进行AI开发 对于习惯Windows系统的开发者来说,直接使用Linux环境进行AI模型开发往往面临诸多不便。WSL2(Windows Subsystem for Linux 2)…...
)
Linux党福利:Debian12下用VSCode+SDCC玩转51单片机(含WSL配置指南)
Debian 12下构建开源51单片机开发环境:VSCodeSDCC全攻略 在Linux环境下开发51单片机一直是个小众但极具技术挑战性的选择。相比Windows平台上Keil的垄断地位,开源工具链在Linux上的表现往往被低估。本文将带你用VSCodeSDCC在Debian 12上搭建一个完整的51…...