ROS2 入门应用 请求和应答(Python)
ROS2 入门应用 请求和应答(Python)
- 1. 创建功能包
- 1. 创建功能包
- 2. 创建源文件
- 2.1. 服务端
- 2.2. 客户端
- 3. 添加依赖关系
- 4. 添加入口点
- 5. 编译和运行
1. 创建功能包
1. 创建功能包
在《ROS2 入门应用 工作空间》中已创建和加载了ros2_ws工作空间
在《ROS2 入门应用 元功能包(C++)》中已创建和加载了my_package功能包
那么就创建一个独立的py_srvcli功能包来做服务的请求和应答的功能
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_python py_srvcli --dependencies rclpy example_interfaces
--dependencies可选参数将会自动在package.xml和CMakeLists.txt中添加必要的依赖行
依赖example_interfaces包,将会使用到example_interfaces的srv文件,两位整数求和服务:
int64 a
int64 b
---
int64 sum
2. 创建源文件
进入py_srvcli功能包的py_srvcli文件夹
cd ~/ros2_ws/src/py_srvcli/py_srvcli
2.1. 服务端
新建service_member_function.py服务端源文件
nano service_member_function.py
复制以下内容到文件中:
from example_interfaces.srv import AddTwoIntsimport rclpy
from rclpy.node import Nodeclass MinimalService(Node):'''服务端节点类'''def __init__(self):# 初始化节点super().__init__('minimal_service')# 初始化服务端,服务类型AddTwoInts,服务add_two_ints,回调函数add_two_ints_callbackself.srv = self.create_service(AddTwoInts, 'add_two_ints', self.add_two_ints_callback)def add_two_ints_callback(self, request, response):'''服务端回调函数'''# 从请求request中添加两个整数,并将总和提供给响应responseresponse.sum = request.a + request.bself.get_logger().info('Incoming request\na: %d b: %d' % (request.a, request.b))return responsedef main():# 初始化ROS2rclpy.init()# 创建服务端节点minimal_service = MinimalService()# 运行服务端节点rclpy.spin(minimal_service)# 退出ROS2rclpy.shutdown()if __name__ == '__main__':main()
2.2. 客户端
新建client_member_function.py客户端源文件
nano client_member_function.py
复制以下内容到文件中:
import sysfrom example_interfaces.srv import AddTwoInts
import rclpy
from rclpy.node import Nodeclass MinimalClientAsync(Node):'''客户端节点类'''def __init__(self):# 初始化节点super().__init__('minimal_client_async')# 初始化客户端,服务类型AddTwoInts,服务add_two_intsself.cli = self.create_client(AddTwoInts, 'add_two_ints')# 搜索服务节点,间隔1swhile not self.cli.wait_for_service(timeout_sec=1.0):self.get_logger().info('service not available, waiting again...')# 定义请求self.req = AddTwoInts.Request()def send_request(self, a, b):'''请求发送函数'''self.req.a = aself.req.b = b# 发送请求self.future = self.cli.call_async(self.req)# 等待至发送请求得到应答rclpy.spin_until_future_complete(self, self.future)# 返回应答结果return self.future.result()def main():# 初始化ROS2rclpy.init()# 创建客户端节点minimal_client = MinimalClientAsync()# 请求发送response = minimal_client.send_request(int(sys.argv[1]), int(sys.argv[2]))# 显示请求-应答状态minimal_client.get_logger().info('Result of add_two_ints: for %d + %d = %d' %(int(sys.argv[1]), int(sys.argv[2]), response.sum))# 销毁节点,退出ROS2minimal_client.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
3. 添加依赖关系
创建功能包时,已通过--dependencies可选参数自动在package.xml中添加必要的依赖行
<depend>rclpy</depend>
<depend>example_interfaces</depend>
4. 添加入口点
打开 setup.py 文件
在entry_points入口字段的console_scripts控制台脚本的括号中添加以下两行:
entry_points={'console_scripts': ['service = py_srvcli.service_member_function:main','client = py_srvcli.client_member_function:main',],
},
添加一个入口点py_srvcli功能包的service_member_function源文件的main函数,并命名为service
添加一个入口点py_srvcli功能包的client_member_function源文件的main函数,并命名为client
5. 编译和运行
进入工作空间根目录
cd ~/ros2_ws
在编译之前检查缺失的依赖项(可跳过):
rosdep install -i --from-path src --rosdistro humble -y
编译:
colcon build --packages-select py_srvcli
打开一个新终端,运行服务端节点准备应答:
ros2 run py_srvcli service
打开一个新终端,运行客户端节点发送请求:
ros2 run py_srvcli client 1 2# [INFO] [minimal_client_async]: Result of add_two_ints: for 1 + 2 = 3
谢谢
相关文章:
)
ROS2 入门应用 请求和应答(Python)
ROS2 入门应用 请求和应答(Python)1. 创建功能包1. 创建功能包2. 创建源文件2.1. 服务端2.2. 客户端3. 添加依赖关系4. 添加入口点5. 编译和运行1. 创建功能包 1. 创建功能包 在《ROS2 入门应用 工作空间》中已创建和加载了ros2_ws工作空间 在《ROS2 入…...

是德Keysight E4991A/e4991B射频阻抗/材料分析仪
Keysight E4991A 射频阻抗/材料分析仪提供终极阻抗测量性能和强大的内置分析功能。它将为评估 3 GHz 范围内组件的组件和电路设计人员的研发提供创新。E4991A 使用 RF-IV 技术,而不是反射测量技术,可在宽阻抗范围内进行更精确的阻抗测量。基本阻抗精度为…...

这才是计算机科学_人工智能
人工智能一、前言二、ML2.1 分类2.1.1 决策树2.2.2 支持向量机2.2.3 人工神经网络三、计算机视觉3.1 Prewitt算子3.2 Viola-Jones 人脸检测算法3.3 卷积神经网络四、自然语言处理4.1 知识图谱4.2 语音识别一、前言 之前讲了计算机从发展到现在的过程,计算机很适合做…...
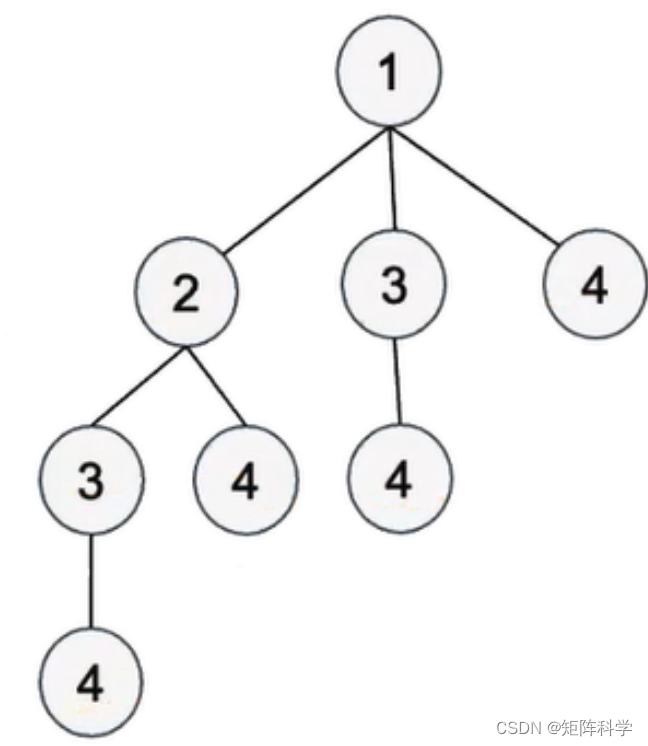
DFS深度优先搜索—Java版
递归三要素 递归的定义 递归的拆解 递归的出口 什么时候使用DFS? 深度回溯问题(DFS与回溯区别不大) 二叉树问题 组合、排列问题 找方案问题(解空间是一棵树或者图,需要自行构造图/树) 图的搜索问题…...
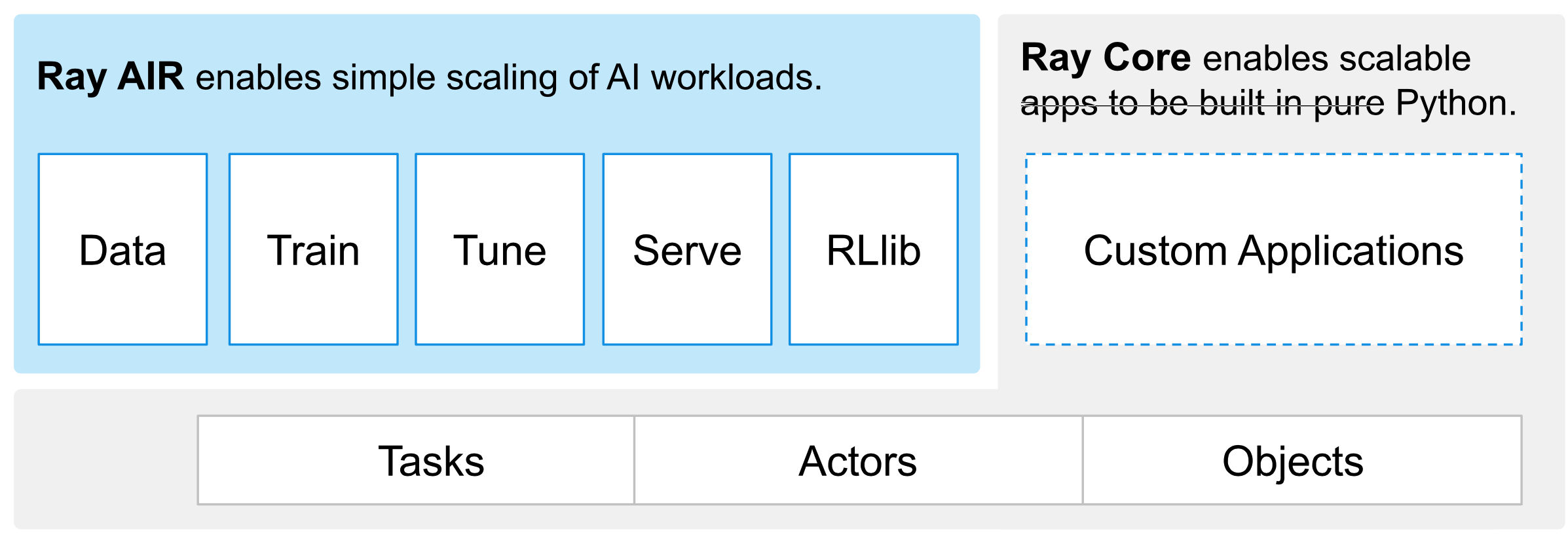
RAY - 小记
文章目录关于 RAYRAY 结构关于 RAY Ray is a unified framework for scaling AI and Python applications. Ray consists of a core distributed runtime and a toolkit of libraries (Ray AIR) for accelerating ML workloads. RAY 是一个简单、通用的分布式计算框架。 RAY 解…...

金三银四软件测试工程师面试题(含答案)
前言:此文专门记载本人平时面试以及收藏的面试题目,如果有错误之处请及时指正,谢谢! 1、python的数据类型有哪些 答:Python基本数据类型一般分为:数字、字符串、列表、元组、字典、集合这六种基本数据类…...
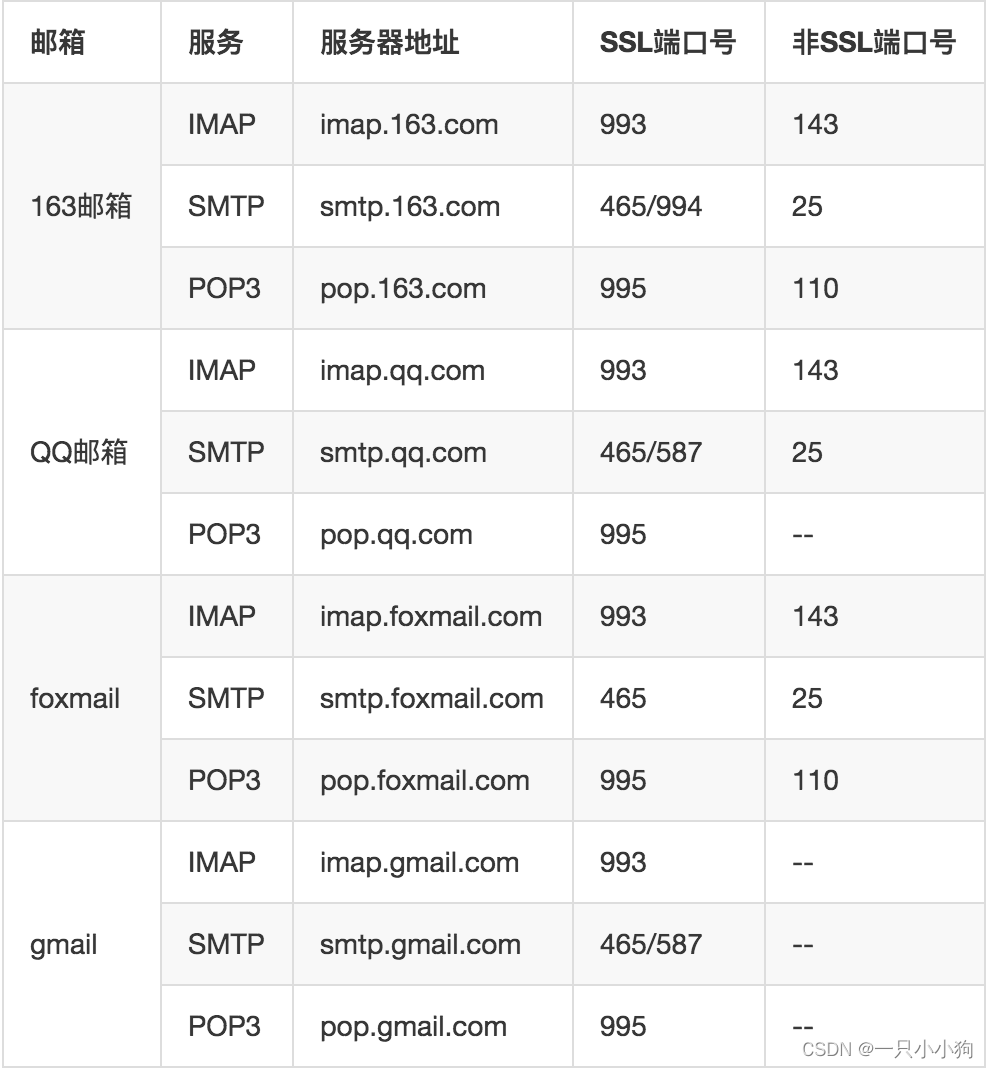
Python 连接数据源与邮件功能(九)
文章目录一、概述二、Python 连接数据源1)Python MySQL 基础操作1、部署MySQL2、MySQL Connector 库【1】安装 mysql-connector-python 库【2】连接 MySQL【3】增加数据【4】查询数据【5】更新数据【6】删除数据2、PyMySQL 库【1】安装 PyMySQL 库【2】连接 MySQL【…...
网站如何锁定用户,超级浏览器有办法解决吗?
随着全球开放,跨境电商人纷纷开启了2023年的搞钱之旅,很多期待着在新的一年大干一场。但前事不忘后事之师,2022年跨境生意全面沦陷,其实除了大环境的因素之外,还有一个很重要的原因是,各个平台都开始实行非…...
Ubuntu下使用Wine运行HBuilderX
安装完wine后,在HbuilderX的目录中打开终端,直接输入wine HBuilderX.exe命令,启动过程中会提示安装wine-mono组件,点击安装按钮下载安装该组件,该组件下载速度慢,需要等待特别长时间。 安装完毕后&…...
如何高效远程维护分布在海外的中大型智能设备?
一、行业需求 随着越来越多的企业进行全球化经营,设备制造商和系统集成商的设备分布到全球各地,数量多而且分散,传统的设备运维方式,面临着出差成本高,工作效率低,服务不及时等问题,客户常常因…...

【双指针问题】LeetCode 925. 长按键入
Halo,这里是Ppeua。平时主要更新C语言,C,数据结构算法......感兴趣就关注我吧!你定不会失望。 🌈个人主页:主页链接 🌈算法专栏:专栏链接 我会一直往里填充内容哒! &…...
APP测试中IOS和Android的区别,有哪些注意点?
01、常识性区别 02、导航方式 iOS:Tab放在页面底部,不能通过滑动来切换,只能点击。也有放在上面的,也不能滑动,但有些Tab本身可以滑动,比如天猫的。还有新闻类的应用。 Android:一般放在页面…...

2019蓝桥杯真题平方序列(填空题) C语言/C++
题目描述 本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。 小明想找到两个正整数 X 和 Y,满足2019<X<Y;2019^2, X^2, Y^2组成等差数列。 请你求出在所有可能的解中,XY 的最小值是多少?…...
vue中,给一个URL地址,利用FileSaver.js插件下载文件到本地
①首先下载 FileSaver.js 插件 npm install file-saver --save ②在需要的.vue页面引入 import { saveAs } from file-saver 在HTML中引入 <script src"https://cdn.bootcdn.net/ajax/libs/FileSaver.js/2.0.5/FileSaver.min.js"></script> //Fil…...
从0开始学python -34
Python3 输入和输出-2 读和写文件 open() 将会返回一个 file 对象,基本语法格式如下: open(filename, mode)filename:包含了你要访问的文件名称的字符串值。mode:决定了打开文件的模式:只读,写入,追加等。…...

瑞典军事研究:从认知心理学的视角探讨军事创新进程
来源:Military Innovation as the Result of Mental Models of Technology 《摘要》 政治紧张局势的加剧和技术发展的进步促使Scandinavian 国家(斯堪的纳维亚半岛,欧洲最大的半岛,有挪威、瑞典两国以及芬兰北端的一小部分。&am…...

【MySQL进阶-08】深入理解innodb存储格式,双写机制,buffer pool底层结构和淘汰策略
MySql系列整体栏目 内容链接地址【一】深入理解mysql索引本质https://blog.csdn.net/zhenghuishengq/article/details/121027025【二】深入理解mysql索引优化以及explain关键字https://blog.csdn.net/zhenghuishengq/article/details/124552080【三】深入理解mysql的索引分类&a…...
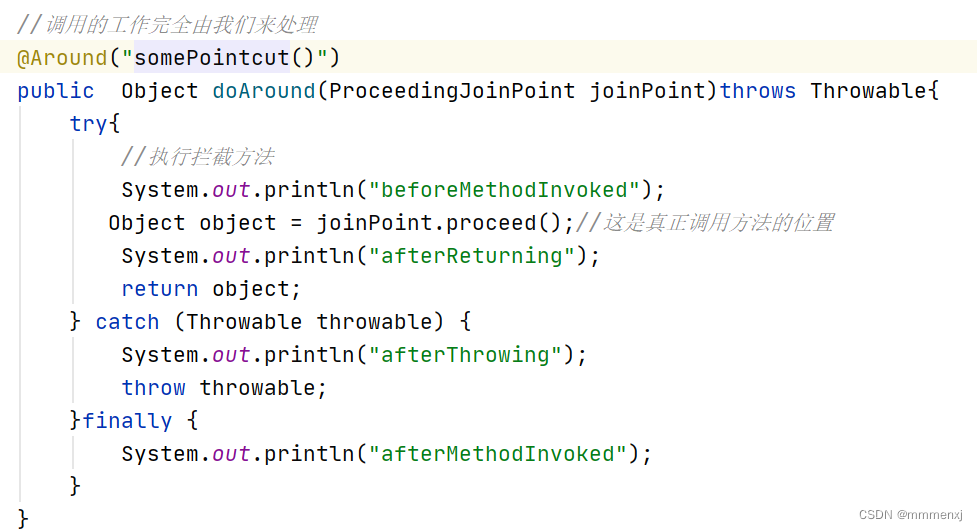
5. AOP
一、如何定义一个MethodHandler? 1.Controller注解修饰的类 1.注册成Spring Bean 2.表示它是一个SpringMVC下的Controller 2.在这个类下的方法中,只要被RequestMapping修饰&&方法的形参符合规定(需要看文档) 方法的返回值符合规定…...

ubuntu上尝试libpqxx库链接人大金仓
ubuntu上尝试libpqxx库链接人大金仓 C的项目让使用国产数据库 运维给架了一个人大金仓数据库, Kingbase 8 是基于 PostgreSQL 9.6 做的, 尝试直接使用libpqxx链接数据库。 文章目录ubuntu上尝试libpqxx库链接人大金仓第一步 搭建libpqxx开发环境搜索lib…...
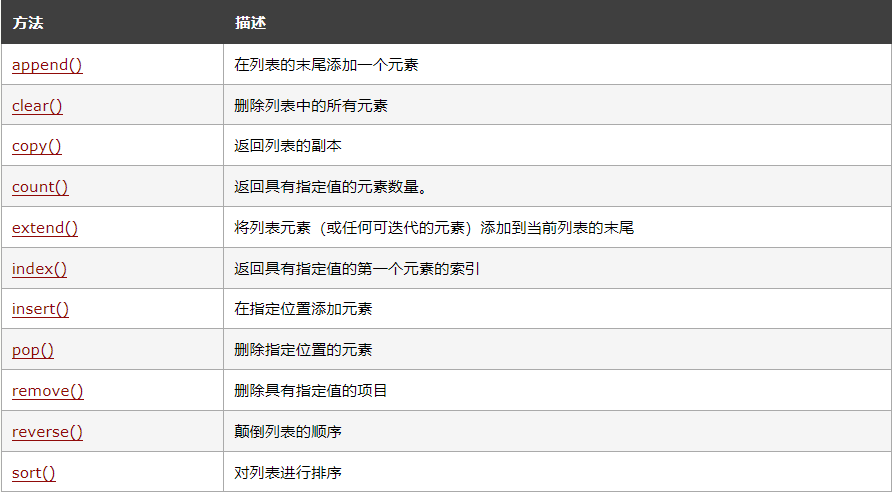
【Python入门第十二天】Python 列表
Python 集合(数组) Python 编程语言中有四种集合数据类型: 列表(List)是一种有序和可更改的集合。允许重复的成员。元组(Tuple)是一种有序且不可更改的集合。允许重复的成员。集合(…...

Parabolic视频下载工具:三步完成200+网站视频下载的终极方案
Parabolic视频下载工具:三步完成200网站视频下载的终极方案 【免费下载链接】Parabolic Download web video and audio 项目地址: https://gitcode.com/GitHub_Trending/pa/Parabolic 你是否还在为寻找一款简单易用、功能强大的视频下载工具而烦恼࿱…...

Odrive多线程架构实战:如何为你的无刷电机项目定制启动流程与状态机
Odrive多线程架构实战:如何为你的无刷电机项目定制启动流程与状态机 在无刷电机控制领域,Odrive凭借其开源特性和强大的性能表现,已成为众多硬件开发者的首选平台。但当你需要将这套系统集成到自己的机器人关节、CNC主轴或无人机推进系统中时…...

Fusion 360安装后想改位置?别重装!试试这个Windows符号链接‘乾坤大挪移’
Fusion 360安装路径迁移:无需重装的Windows符号链接实战指南 你是否遇到过这样的困扰——Fusion 360默认安装在C盘,随着项目文件增多,宝贵的SSD空间被快速吞噬?传统认知告诉我们,软件一旦安装就无法更改路径࿰…...
)
服务器上5分钟搞定:用wget直接下载并配置mongodump备份工具(Linux实战)
服务器极速部署指南:5分钟完成mongodump备份工具配置 在Linux服务器运维中,时间就是效率。想象一下这样的场景:凌晨三点收到数据库告警,你需要立即建立备份机制,但传统的"下载-上传-配置"流程至少需要15分钟…...
 (光通信必学必会))
【信息科学与工程学】信息科学领域工程——第二篇 材料工程10 光学材料 (1) (光通信必学必会)
表1:光学材料知识库 第一部分:光学基础理论与数学模型 编号 算法/策略名称和伪代码/数学方程式 核心数学描述/规律 关键参数/变量 物理/化学/工程意义/控制目标 典型应用场景 优点与局限 关联知识连接点 1.1.1 麦克斯韦方程组 ∇D = ρ_f ∇B = 0 ∇E = -∂B/∂t ∇…...

两个清华学霸 41 岁第二次创业,10 年把华为耳机里的“中国芯“做成了 800 亿市值
大家好,我是写代码的篮球球痴。写之前先给个数据感受。我自己 2015 年开始接触瑞芯微的 RK3168/RK3188/RK3128 做嵌入式 Linux,那时候做芯片选型,有一个共识——蓝牙芯片这块,国内基本没有能打的,要么用 CSR࿰…...

【深度解析】从 Gemini 3.2、Claude 限额变化到 AI Agent:大模型工程化选型与实战评估
摘要 本文基于近期 AI 模型与 Agent 生态变化,解析 Gemini 3.2、Claude 快速模式、第三方 Agent 成本变化等技术趋势,并给出一套可落地的大模型 API 调用与评估示例,帮助开发者构建更稳定、可扩展的 AI 应用架构。背景介绍 近期 AI 领域出现了…...

大模型爆发期!程序员现在转型,还能赶上风口吗?
文章目录前言一、2026年,大模型风口到底有多猛?二、90%的人不敢转型,都是被这3个误区坑了误区1:转大模型必须会高数、会从头训模型误区2:我只会写CRUD,没资格转大模型误区3:现在转已经晚了&…...

AI智能体开发新范式:用TDD工程化方法构建可靠LLM应用
1. 项目概述:当AI智能体遇上测试驱动开发最近在GitHub上看到一个挺有意思的项目,叫agent-skill-tdd。光看名字,就能嗅到一股“新老结合”的味道——一边是当下火热的AI智能体(Agent),另一边是软件工程领域经…...

【NotebookLM考古学研究辅助实战指南】:20年文博技术专家亲授3大冷启动技巧,让田野笔记秒变学术论文
更多请点击: https://intelliparadigm.com 第一章:NotebookLM考古学研究辅助的范式革命 NotebookLM 作为 Google 推出的基于文档理解的 AI 助手,正悄然重塑考古学研究的信息处理范式。传统考古工作依赖大量手写笔记、田野报告、碳十四测年数…...