机器人CPP编程基础-03变量类型Variables Types
机器人CPP编程基础-02变量Variables
全文AI生成。
C++
#include<iostream>using namespace std;main()
{int a=10,b=35; // 4 bytescout<<"Value of a : "<<a<<" Address of a : "<<&a <<endl;cout<<"Value of b : "<<b<<" Address of b : "<<&b <<endl;short s=20; //2 bytescout <<"Value of s : "<< s << endl;float f1=20.03; //4 bytesdouble d1=50.55416416; //8 bytescout <<"Value of f1 : "<< f1 << endl;cout <<"Value of d1 : "<< d1 << endl;char c1='A';cout<<c1<<endl;string s1="Hello Tridib";cout<<s1<<endl;string s2="Welcome to CPP !";cout<<s2<<endl;string combineStrings=s1+", "+s2;cout<<combineStrings<<endl;bool b1=true; //Boolean is true or false. FALSE IS ALWAYS ZERO, EVERY OTHER NUMBER IS TRUE.cout<<b1<<endl;b1=1515;cout<<b1<<endl;b1=-445;cout<<b1<<endl;b1=0;cout<<b1<<endl;//Positive numbers or unsigned numbers. Increases the positive range.unsigned short int u1=60445;cout<< u1 <<endl;const string myname="Tridib";cout << myname << endl;}
该代码是用C++编写的,它包含了各种数据类型的声明和初始化,以及如何使用cout语句来打印这些变量的值和地址。下面是每行的详细解析:
以上就是对这段代码的详细解析。
#include<iostream>: 包含输入/输出流的库。这使得程序可以使用输入和输出功能。using namespace std;: 声明使用std命名空间。std是标准缩写,表示标准库。这样,我们就可以直接使用标准库中的名字,而不用在每个名字前都写std::。main(): 程序的主函数,所有C++程序都从这里开始执行。int a=10,b=35;: 声明两个整数变量a和b并初始化为10和35。cout<<"Value of a : "<<a<<" Address of a : "<<&a <<endl;: 使用cout打印"Value of a : "和变量a的值,然后打印"Address of a : "和变量a的地址。&操作符用于获取变量的内存地址。endl用于插入新行。cout<<"Value of b : "<<b<<" Address of b : "<<&b <<endl;: 与上述类似,但打印的是变量b的值和地址。short s=20;: 声明一个短整型变量s并初始化为20。在大多数系统上,short通常是2字节(16位)。cout <<"Value of s : "<< s << endl;: 使用cout打印"Value of s : "和变量s的值。float f1=20.03;: 声明一个单精度浮点型变量f1并初始化为20.03。在大多数系统上,float通常是4字节(32位)。double d1=50.55416416;: 声明一个双精度浮点型变量d1并初始化为50.55416416。在大多数系统上,double通常是8字节(64位)。cout <<"Value of f1 : "<< f1 << endl;: 使用cout打印"Value of f1 : "和变量f1的值。cout <<"Value of d1 : "<< d1 << endl;: 使用cout打印"Value of d1 : "和变量d1的值。char c1='A';: 声明一个字符变量c1并初始化为'A'。cout<<c1<<endl;: 使用cout打印变量c1的值,也就是字符'A'。string s1="Hello Tridib";: 声明一个字符串变量s1并初始化为"Hello Tridib"。cout<<s1<<endl;: 使用cout打印变量s1的值,也就是"Hello Tridib"。string s2="Welcome to CPP !";: 声明另一个字符串变量s2并初始化为"Welcome to CPP !"。cout<<s2<<endl;: 使用cout打印变量s2的值,也就是"Welcome to CPP !"。string combineStrings=s1+", "+s2;: 将s1和s2连接在一起,创建一个新的字符串combineStrings。cout<<combineStrings<<endl;: 使用cout打印变量combineStrings的值,也就是"Hello Tridib, Welcome to CPP !"。bool b1=true;: 声明一个布尔型变量b1并初始化为true。在C++中,布尔类型的值只能是true或false。cout<<b1<<endl;: 使用cout打印变量b1的值,也就是true。在C++中,输出布尔值时会自动转换为字符串"true"或"false"。b1=1515;: 将变量b1的值更改为整数1515。在C++中,布尔类型的值也可以是0或非0的任何整数。cout<<b1<<endl;: 使用cout打印变量b1的值,由于非零的整数会被视为true,所以这里输出的是true。b1=-445;: 将变量b1的值更改为-445。cout<<b1<<endl;: 使用cout打印变量b1的值,由于非零的整数会被视为true,所以这里输出的是true。
-
b1=0;: 将变量b1的值更改为0。 cout<<b1<<endl;: 使用cout打印变量b1的值,由于布尔类型的值只能是true或false,所以这里输出的是false。unsigned short int u1=60445;: 声明一个无符号短整型变量u1并初始化为60445。在大多数系统上,unsigned short通常是2字节(16位)。cout<< u1 <<endl;: 使用cout打印变量u1的值。由于是无符号类型,所以可以输出大于255的整数。const string myname="Tridib";: 声明一个常量字符串变量myname并初始化为"Tridib"。const关键字表示该变量的值不能被修改。cout << myname << endl;: 使用cout打印变量myname的值,也就是"Tridib"。
C++是一种多范式编程语言,支持多种变量类型。下面是C++中主要的变量类型及其描述:
-
基本类型
-
整数类型:这些类型用于存储整数值。有符号和无符号两种类型。
int: 通常为32位,但大小可能因平台而异。short: 通常为16位。long: 通常为32位或64位,大小可能因平台而异。long long: 通常为64位,大小可能因平台而异。
-
浮点类型:这些类型用于存储带有小数点的值。
float: 单精度,通常为32位。double: 双精度,通常为64位。
-
字符类型:这些类型用于存储单个字符或ASCII值。
char: 有符号或无符号,通常为8位。
-
布尔类型:
bool,用于存储逻辑值,可以取true或false。
-
-
复合类型
- 数组:用于存储相同类型的多个元素。
- 字符串:字符数组,用于存储多个字符。
- 结构体:用于将多个不同类型的变量组合在一起。
- 联合体:用于在内存中共享多个不同数据类型的变量。
-
指针类型
int *p;:定义一个指向整数的指针。double *dp;:定义一个指向双精度浮点数的指针。char *cp;:定义一个指向字符的指针。
-
引用类型
int &ref;:定义一个对整数变量的引用。引用和它引用的变量在内存中是同一实体。
-
枚举类型
enum color { red, green, blue };:定义了一个名为color的枚举类型,包含三个可能的值:red、green和blue。
-
自定义类型
- 类:定义自定义的数据类型和方法。类是一种用户自定义的数据类型,可以包含属性(变量)和方法(函数)。
-
特殊类型
void:表示无类型,常用于函数的返回值类型,如void func()表示该函数没有返回值。const:表示常量,一旦给定值就不能改变。例如const int a = 10;,a的值就不能再改变。volatile:表示易变的,即程序无法预知该变量的值会随时发生变化。例如硬件寄存器的值、正在运行的进程等。
-
复合类型(如数组、指针、引用等)的进一步扩展:
- 指针数组:数组的元素是指针类型。例如
int *arr[5]定义了一个包含5个指向整数的指针的数组。 - 指向指针的指针:例如
int **pp;定义了一个指向指针的指针,该指针可以指向一个整数类型的变量。 - 引用数组:例如
int &arr[5]定义了一个包含5个整数引用的数组。每个引用都是它引用的数组元素的别名。
- 指针数组:数组的元素是指针类型。例如
-
函数指针:指向函数的指针,例如
int (*fp)(int)定义了一个接受一个整数参数并返回一个整数的函数指针。 -
智能指针:C++11引入了智能指针,以帮助管理动态分配的内存。智能指针是一种类,它以一种安全的方式自动管理动态分配的内存。以下是一些智能指针类型:
std::unique_ptr<T>:这种类型的指针在离开作用域时自动删除其所有权。它只能指向一个对象,并保证其指向的对象在任何时刻都有一个所有者。std::shared_ptr<T>:这种类型的指针允许多个智能指针共享同一个对象。当最后一个智能指针离开作用域或被重置时,它会自动删除所指向的对象。std::weak_ptr<T>:这种类型的指针也是指向共享对象的,但不会增加对象的引用计数。当最后一个shared_ptr离开作用域或被重置时,weak_ptr将看到对象的析构。
这些是C++中的主要变量类型。根据需要,还可以创建自定义类型和结构,以满足特定的编程需求。
C++14引入了一些新的变量类型,这些类型在C++11和C++17中都有所扩展。以下是一些C++14中引入的新变量类型:
-
原子类型(Atomic Types):这些类型定义在<atomic>头文件中,用于表示可以在不引起其他线程阻塞的情况下被单独操作的值。原子类型包括整数、浮点数和指针类型。
atomic<T>:定义了一个原子操作的基本类型。原子操作是一种在单个线程中执行的操作,它可以在没有其他线程干扰的情况下修改数据。atomic_flag:定义了一个原子标志,可以用于实现简单的原子布尔操作。
-
数组的初始化:C++14引入了一种新的数组初始化方法,允许使用花括号
{}进行初始化。例如:
cpp复制代码
int arr[] = {1, 2, 3, 4, 5}; |
-
通用 Lambda 捕获:C++14引入了通用 lambda 捕获,允许捕获变量,无论它们是否在作用域中。例如:
cpp复制代码
auto lambda = [captured_var = some_global_var](){ /* Use captured_var */ }; |
- 右值引用(Rvalue References):进一步扩展了右值引用,使其更易于使用和更灵活。C++14引入了
std::move和std::forward函数,用于移动语义和完美转发。 - 类型萃取(Type deduction):C++14引入了一些新的类型萃取规则,包括萃取数组和函数类型的参数。
- Unicode 支持:C++14引入了更全面的 Unicode 支持,包括新的字符类型和函数。
- 线程局部存储(Thread-local storage):C++14引入了线程局部存储,允许为每个线程存储单独的变量副本。
- 二进制字面值:C++14引入了新的二进制字面值,包括二进制整数和二进制浮点数。
- 字面值的显示浮点数:C++14允许在字面值中使用显示浮点数,例如
0x1p+2n表示一个十六进制浮点数。
这些是C++14引入的一些主要变量类型和功能。这些功能增强了语言的表达力和性能,并提供了更多的灵活性和控制。
C++20引入了一些新的变量类型和功能,进一步扩展了语言的表达力和性能。以下是一些C++20中引入的新变量类型和功能:
-
概念(Concepts):概念是一种用于指定类型必须满足的条件的语言特性。可以使用概念来约束模板参数的类型,以便在模板实例化时确保类型符合特定的要求。这有助于提高代码的可读性和可维护性。
cpp复制代码
template <typename T> concept bool C() { return requires (T t) { t++; }; } | |
template <C T> void f(T t) { ++t; } |
-
结构化绑定(Structured Binding):C++20引入了结构化绑定,允许将一个表达式的值直接分配给多个变量。这使得在解构数组、元组或其他复合类型时更加方便。
cpp复制代码
int a = 1, b = 2; | |
auto [c, d] = a + b; // c = 3, d = 3 |
-
if constexpr:C++20引入了
if constexpr语句,它允许在编译时根据条件选择不同的代码路径。这对于在编译时进行条件编译和静态分派非常有用。
cpp复制代码
template <typename T> void f(T value) { | |
if constexpr (std::is_integral_v<T>) { | |
// 处理整数类型 | |
} else if constexpr (std::is_floating_point_v<T>) { | |
// 处理浮点数类型 | |
} | |
} |
- 三向比较(Three-way Comparison):C++20引入了三向比较运算符
<=>,用于执行基于比较的操作。这可以用于实现自定义类型的比较操作。 - 模板别名(Template Aliases):C++20引入了模板别名,允许使用别名来简化模板的声明和使用。
- 折叠表达式(Fold Expressions):C++20引入了折叠表达式,允许在展开二元或三元运算符时进行递归计算。这对于实现高阶函数和泛型算法非常有用。
- 嵌套的命名空间(Nested Namespaces):C++20允许在命名空间内部定义另一个命名空间,以更好地组织代码。
- 上下文重复名称(Contextual Repeated Name):C++20允许在特定上下文中重复使用名称,这有助于提高代码的可读性。
- 模块(Modules):C++20引入了模块,这是一种将代码划分为逻辑单元的方式,以提高编译速度和代码组织。模块可以用于实现特定功能或库的封装和重用。
- 概念工具(Concept Tools):C++20提供了一组工具,用于定义和操作概念。这有助于提高代码的可读性和可维护性。
这些是C++20引入的一些主要变量类型和功能。这些功能进一步增强了语言的表达力和性能,并提供了更多的灵活性和控制。
Arduino
#include <avr/pgmspace.h> void setup() { Serial.begin(9600); int a = 10; Serial.print("Value of a : "); Serial.print(a); Serial.print(" Address of a : "); Serial.println(&a); short s = 20; Serial.print("Value of s : "); Serial.println(s); float f1 = 20.03; Serial.print("Value of f1 : "); Serial.print(f1); Serial.println(); double d1 = 50.55416416; Serial.print("Value of d1 : "); Serial.println(d1); char c1 = 'A'; Serial.print(c1); Serial.println(); const char* s1 = "Hello Tridib"; Serial.println(s1); const char* s2 = "Welcome to CPP !"; Serial.println(s2); const char* combineStrings = pgm_read_word(&combineStrings); //pgm_read_word(&combineStrings) is used to get the address of the combineStrings variable in flash memory space and is not related to the original code Serial.println(combineStrings); bool b1 = true; Serial.println(b1); b1 = 1515; Serial.println(b1); b1 = -445; Serial.println(b1); b1 = 0; Serial.println(b1); unsigned short int u1 = 60445; Serial.println(u1);
} void loop() { // put your main code here, to run repeatedly:
}Arduino IDE使用的是C++的变量类型,因此它支持C++的所有常见变量类型。以下是在Arduino IDE中常用的C++变量类型:
-
基本类型
int: 用于表示整数值,通常为16位。unsigned int: 用于表示无符号整数值,通常为16位。long: 用于表示长整数值,通常为32位。unsigned long: 用于表示无符号长整数值,通常为32位。char: 用于表示字符值,通常为8位。bool: 用于表示布尔值,可以取true或false。float: 用于表示单精度浮点数值,通常为32位。double: 用于表示双精度浮点数值,通常为64位。
-
指针类型
int *p;:定义一个指向整数的指针。char *str;:定义一个指向字符数组的指针。
-
数组类型
int arr[10];:定义一个包含10个整数的数组。char str[] = "Hello";:定义一个包含字符串"Hello"的字符数组。
-
结构体类型
struct MyStruct { int id; char name[20]; };:定义一个名为MyStruct的结构体,包含一个整型成员变量id和一个字符数组成员变量name。
-
联合体类型
union MyUnion { int id; char name[20]; };:定义一个名为MyUnion的联合体,包含一个整型成员变量id和一个字符数组成员变量name。
-
函数类型
int myFunction(int arg1, char arg2);:定义一个名为myFunction的函数,接受一个整型参数arg1和一个字符型参数arg2,并返回一个整型值。
-
自定义类型
typedef int MyInt;:定义一个新的类型别名MyInt,相当于int类型。
-
枚举类型
enum MyEnum { RED, BLUE, GREEN };:定义一个名为MyEnum的枚举类型,包含三个可能的值:RED、BLUE和GREEN。
-
类型转换
- 自动类型转换:将一种类型的值赋给另一种类型的变量时,编译器会自动进行类型转换。例如,将一个整数值赋给一个浮点变量时,编译器会将整数值转换为浮点数。
- 强制类型转换:使用强制类型转换运算符将一种类型的值转换为另一种类型。例如,
(float) x将x转换为浮点数类型。
-
常量和常量表达式
- 常量:使用const关键字定义常量,其值在程序运行期间不可改变。例如,const int kConstantValue = 42;
- 常量表达式:使用const和字面值初始化器定义常量表达式。常量表达式必须是可以在编译时计算出结果的表达式,不能包含变量或函数调用。例如,const int kConstantExpression = 4 * 7;是常量表达式,而const int kVariableExpression = k + 1;不是常量表达式,因为k的值在编译时无法确定。
这些是在Arduino IDE中常用的C++变量类型和相关概念。了解这些变量类型和概念对于编写Arduino程序非常重要。
ROS1
AI生成是否可行???
#include <ros/ros.h>
#include <std_msgs/String.h> int main(int argc, char **argv)
{ ros::init(argc, argv, "my_node"); ros::NodeHandle nh; int a=10,b=35; // 4 bytes ros::console::cout << "Value of a : " << a << " Address of a : " << &a << ros::console::endl; ros::console::cout << "Value of b : " << b << " Address of b : " << &b << ros::console::endl; short s=20; //2 bytes ros::console::cout << "Value of s : " << s << ros::console::endl; float f1=20.03; //4 bytes ros::console::cout << "Value of f1 : " << f1 << ros::console::endl; double d1=50.55416416; //8 bytes ros::console::cout << "Value of d1 : " << d1 << ros::console::endl; int c1 = 65; ros::console::cout << c1 << ros::console::endl; std_msgs::String s1; s1.data = "Hello Tridib"; ros::console::cout << s1.data << ros::console::endl; std_msgs::String s2; s2.data = "Welcome to CPP !"; ros::console::cout << s2.data << ros::console::endl; // string concatenation not supported in ROS // you can use roscpp'sRosOutSignal to achieve this easily. // RosOutSignal().outStr(s1.data + ", " + s2.data); // instead of the line above you can do: std_msgs::String combineStrings; combineStrings.data = s1.data + ", " + s2.data; ros::console::cout << combineStrings.data << ros::console::endl; bool b1=true; //Boolean is true or false. FALSE IS ALWAYS ZERO, EVERY OTHER NUMBER IS TRUE. ros::console::cout << b1 << ros::console::endl; b1=1515; ros::console::cout << b1 << ros::console::endl; b1=-445; ros::console::cout << b1 << ros::console::endl; b1=0; ros::console::cout << b1 << ros::console::endl; //Positive numbers or unsigned numbers. Increases the positive range. unsigned short int u1=60445; ros::console::cout << u1 << ros::console::endl; // const string myname="Tridib"; is not supported in ROS, you should use a string_view instead. (not implemented in roscpp at the time of writing)
}ROS1 Noetic是ROS1的一个版本,使用C++作为主要的编程语言。在ROS1 Noetic中,常见的C++变量类型包括以下几种:
- 基本类型:与标准C++相同,包括int、float、double、char等。
- 智能指针类型:ROS1 Noetic主要使用
std::shared_ptr和std::unique_ptr两种智能指针类型,用于自动管理资源的生命周期。 - 回调函数类型:ROS1 Noetic提供了ROS1特定的回调函数类型,如
boost::function和boost::slot,用于实现事件驱动的回调机制。 - 命名空间:ROS1 Noetic使用了多个命名空间,如
ros、std_msgs、sensor_msgs等,用于组织和管理ROS相关的代码和消息类型。 - 消息类型:ROS1 Noetic使用特定的消息类型,如
std_msgs::String、sensor_msgs::Image等,用于在ROS系统中进行节点之间的通信。这些消息类型通常定义在ROS1的消息规范中。 - 服务类型:ROS1 Noetic使用特定的服务类型,如
ros::ServiceServer和ros::ServiceResponse,用于在ROS系统中实现服务调用。这些服务类型定义在ROS1的服务规范中。 - 动作类型:ROS1 Noetic使用特定的动作类型,如
actionlib::SimpleActionClient和actionlib::SimpleGoal,用于在ROS系统中实现复杂的行为控制。这些动作类型定义在ROS1的动作规范中。
除了上述变量类型外,ROS1 Noetic还提供了许多其他的工具和库,用于实现机器人控制、传感器数据处理、可视化等功能。
相关文章:
机器人CPP编程基础-03变量类型Variables Types
机器人CPP编程基础-02变量Variables 全文AI生成。 C #include<iostream>using namespace std;main() {int a10,b35; // 4 bytescout<<"Value of a : "<<a<<" Address of a : "<<&a <<endl;cout<<"Val…...

或许有用的开源项目平台——物联网、区块链、商城、CMS、客服系统、低代码、可视化、ERP等
摘自个人印象笔记Evernote Export wumei-smart-物美智能开源物联网平台 官网:https://wumei.live/ gitee:https://gitee.com/kerwincui/wumei-smart 一个简单易用的物联网平台。可用于搭建物联网平台以及二次开发和学习。适用于智能家居、智慧办公、智慧…...
火车头采集伪原创插件【php源码】
大家好,小编来为大家解答以下问题,python代码大全和用法,python代码大全简单,现在让我们一起来看看吧! 火车头采集ai伪原创插件截图: 1、题目:列表转换为字典。 程序源代码: 1 #!/us…...
【数学】CF1514 C
Problem - 1514C - Codeforces 题意: 思路: Code: #include <bits/stdc.h>using i64 long long;constexpr int N 2e5 10; constexpr int M 2e5 10; constexpr int mod 998244353;void solve() {int n;std::cin >> n;std:…...

SqlServer基础之(触发器)
概念: 触发器(trigger)是SQL server 提供给程序员和数据分析员来保证数据完整性的一种方法,它是与表事件相关的特殊的存储过程,它的执行不是由程序调用,也不是手工启动,而是由事件来触发&#x…...
数据结构刷题训练:队列实现栈
目录 前言 1. 题目:使用队列实现栈 2. 思路 3. 分析 3.1 创建栈 3.2入栈 3.3 出栈 3.4 栈顶数据 3.5 判空和 “ 栈 ” 的销毁 4. 题解 总结 前言 我们已经学习了栈和队列,也都实现了它们各自的底层接口,那么接下我们就要开始栈和队列的专项刷…...
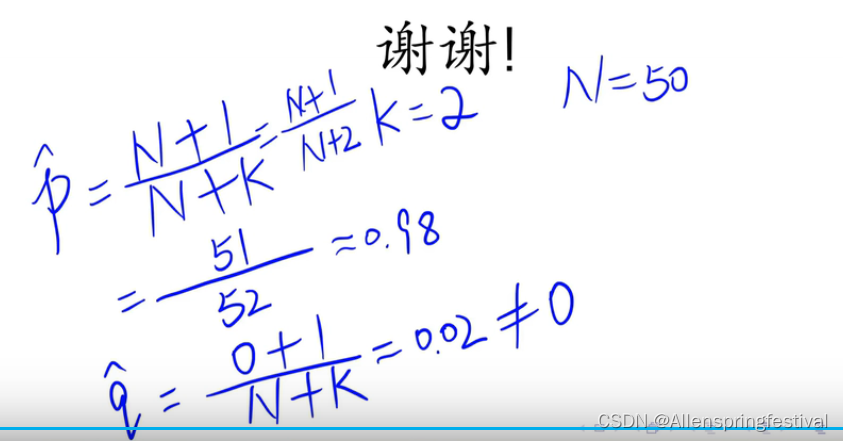
(统计学习方法|李航)第四章 朴素贝叶斯算法——贝叶斯估计
贝叶斯估计方法: 计算男女时只有两个值,所以K2 贝叶斯估计就是拉普拉斯平滑 估计方法:为什么叫做贝叶斯估计呢? 例题: 重新回顾以下朴素贝叶斯: 对他求导,求出最大值 得到了色i他的估计值&…...

企业直播MR虚拟直播(MR混合现实直播技术)视频介绍
到底什么是企业直播MR虚拟直播(MR混合现实直播技术)? 企业直播MR虚拟直播新玩法(MR混合现实直播技术) 我的文章推荐: [视频图文] 线上研讨会是什么,企业对内对外培训可以用线上研讨会吗&#x…...

React Fiber: 从 Reconciliation 到 Concurrent Mode
React Fiber 是 React 中的一种新的协调算法,它的主要目的是提高 React 的性能和可维护性。在 React Fiber 之前,React 使用了一种叫做 Stack Reconciliation 的算法来处理组件的更新和渲染。但是 Stack Reconciliation 存在一些问题,比如无法…...
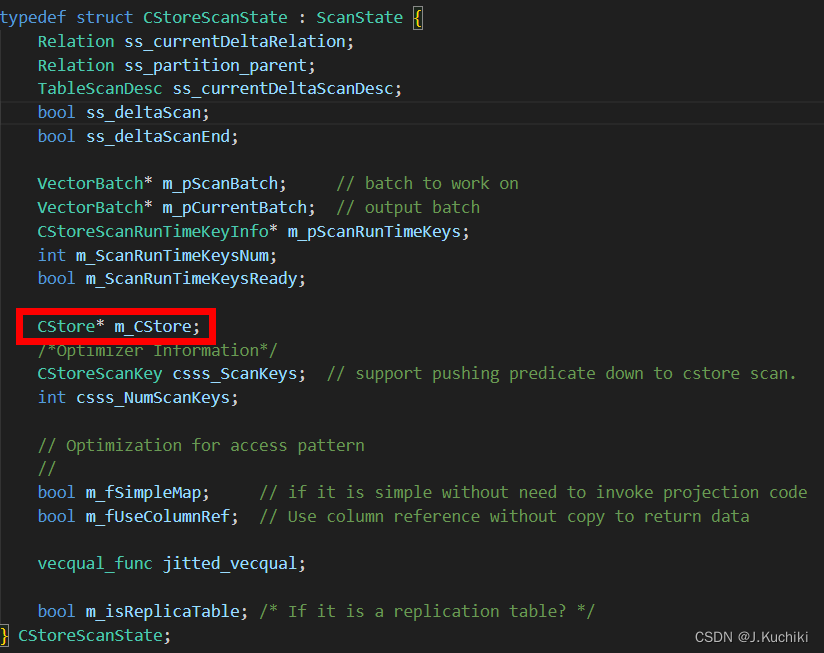
【PostgreSQL内核学习(十一)—— OpenGauss源码学习(CopyTo)】
可优化语句执行 概述什么是列存储?列存的优势 相关函数CopyToCStoreCopyToCopyStatetupleDescCStoreScanDesc CStoreBeginScanRelationSnapshotProjectionInfo GetCStoreNextBatchRunScanFillVecBatchCStoreIsEndScan CStoreEndScan 声明:本文的部分内容…...
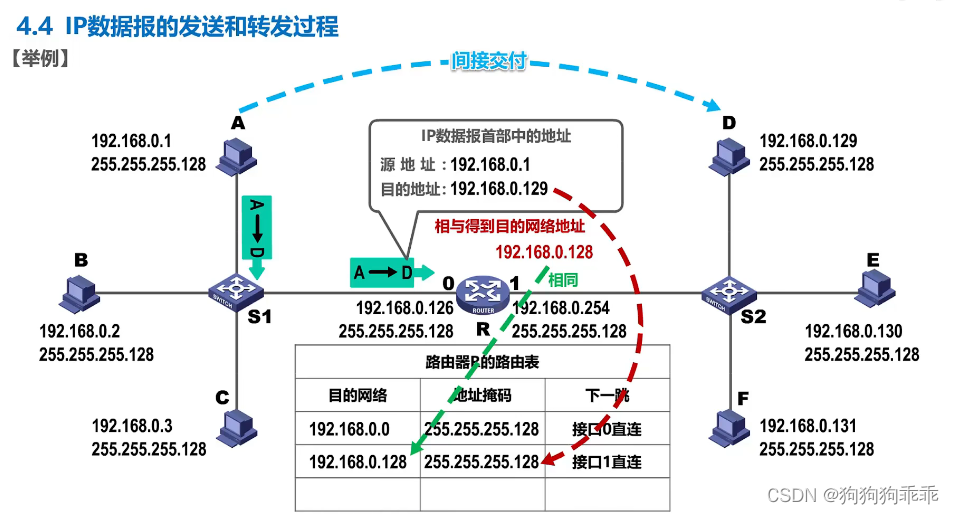
计算机网络 网络层 IPv4地址
A类地址第一位固定0 B类10 其下同理...

【程序员社交】多和高层次人群交流
定义问题:如何多和高层次人群交流获取经验提升自己? 收集信息:通过社交媒体、行业论坛、行业大会等途径获取高层次人群的信息和观点,并了解他们的工作经历、技能和能力。 分析信息:分析收集到的信息,了解…...

机器学习笔记 - 基于C++的深度学习 三、实现成本函数
机器学习中的建模 作为人工智能工程师,我们通常将每个任务或问题定义为一个函数。 例如,如果我们正在开发面部识别系统,我们的第一步是将问题定义为将输入图像映射到标识符的函数F(X)。但是问题是如何知道F(X)公式? 事实上,使用公式或一系列固有规则来定义F(X)是不可行的(…...

lazada、shopee店铺如何利用测评提高权重和排名?
在 lazada、shopee平台上开店后,卖家们必须对店铺的权重进行更多的关注。如果店铺的权重越高,那么它就会带来更多的流量和更多的订单,那么在 lazada、shopee平台上开设一家店铺,该怎样增加它的店铺权重和排名呢? laza…...
安全第二次
一,iframe <iframe>标签用于在网页里面嵌入其他网页。 1,sandbox属性 如果嵌入的网页是其他网站的页面,因不了解对方会执行什么操作,因此就存在安全风险。为了限制<iframe>的风险,HTML 提供了sandb…...

125、SpringBoot可以同时处理多少请求?
SpringBoot可以同时处理多少请求? 一、前言二、线程池4大参数图解三、代码示例一、前言 我们都知道,SpringBoot默认的内嵌容器是Tomcat,也就是我们的程序实际上是运行在Tomcat里的。所以与其说SpringBoot可以处理多少请求,到不如说Tomcat可以处理多少请求。 关于Tomcat的默…...
SSE技术和WebSocket技术实现即时通讯
文章目录 一、SSE1.1 什么是SSE1.2 工作原理1.3 特点和适用场景1.4 API用法1.5 代码实现 二、WebSocket2.1 什么是WebSocket2.2 工作原理2.3 特点和适用场景2.4 API用法2.5 代码实现2.6 心跳检测 三、SSE与WebSocket的比较 当涉及到实现实时通信的Web应用程序时,两种…...
什么是敏捷开发?
敏捷开发流程:制度化、规范化地PUA程序员的顶级神器!!!...

tcp发送整型,结构体等数据的方法
测试环境 Receiver: x86 UbuntuSender: arm64 android 发送整型数 C语言和套接字库来发送一个整型变量(int)的客户端程序。 它首先创建一个TCP套接字,然后连接到指定的服务器地址和端口。接着,它将一个整型变量(in…...

【Unity每日一记】让一个物体按余弦曲线移动—(三角函数的简单运用)
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:uni…...

精读双模态检测系列十九|大湾区大学 港理工 澳门理工IEEE TIP 2025 FusionMamba 封神!Mamba 动态特征增强 SOTA,检测 mAP 暴涨 13.8%!
🔥 本文定位:CSDN 原创硬核干货 | 多模态融合 YOLO 下游任务全适配🎯 核心收益:一次性解决多模态图像融合四大行业顽疾 ——CNN 局部感受野受限、Transformer 计算量爆炸、模态互补信息挖掘不足、局部纹理细节丢失!基…...

InkOS:基于多Agent协作与长期记忆的AI小说创作系统深度解析
1. 项目概述:一个能自主写小说的AI Agent如果你对AI写作的印象还停留在“输入一句话,生成一段文”的简单工具,那么InkOS可能会颠覆你的认知。这不是一个玩具,而是一个拥有完整创作管线、具备长期记忆和自主审计能力的“小说创作AI…...

从静态到动态:用sd-webui-animatediff解锁AI视频创作的魔法配方 [特殊字符]
从静态到动态:用sd-webui-animatediff解锁AI视频创作的魔法配方 🎬 【免费下载链接】sd-webui-animatediff AnimateDiff for AUTOMATIC1111 Stable Diffusion WebUI 项目地址: https://gitcode.com/gh_mirrors/sd/sd-webui-animatediff 想象一下&…...
)
嵌入式C结构体对齐×大模型权重布局(内存带宽利用率提升3.8倍的底层对齐秘钥)
更多请点击: https://intelliparadigm.com 第一章:嵌入式C结构体对齐大模型权重布局(内存带宽利用率提升3.8倍的底层对齐秘钥) 在资源受限的嵌入式AI推理场景中,结构体字段对齐不仅关乎内存安全,更直接决定…...

SARIMA模型:季节性时间序列预测实战指南
1. 理解SARIMA:季节性时间序列预测的核心工具时间序列分析中最常见的挑战之一就是处理具有明显季节性波动的数据。传统ARIMA模型在非季节性数据上表现优异,但遇到像月度销售额、季度气温变化这类具有固定周期特征的数据时就会捉襟见肘。这正是SARIMA(Sea…...

BilibiliDown:3分钟掌握B站视频下载的终极免费解决方案
BilibiliDown:3分钟掌握B站视频下载的终极免费解决方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/…...

OpenModScan:工业自动化工程师必备的免费Modbus调试工具终极指南
OpenModScan:工业自动化工程师必备的免费Modbus调试工具终极指南 【免费下载链接】OpenModScan Open ModScan is a Free Modbus Master (Client) Utility 项目地址: https://gitcode.com/gh_mirrors/op/OpenModScan OpenModScan是一款功能强大的免费开源Modb…...

Oumuamua-7b-RP实际作品:10轮对话内完成‘邀请主人赏樱→准备便当→撑伞同行’叙事闭环
Oumuamua-7b-RP实际作品:10轮对话内完成邀请主人赏樱→准备便当→撑伞同行叙事闭环 1. 项目概述 Oumuamua-7b-RP 是一款专为日语角色扮演对话设计的Web界面应用,基于Mistral-7B架构开发。这个工具特别适合想要体验沉浸式日语对话的用户,无论…...
)
保姆级教程:不用下载整个Win10 ISO,教你快速获取正确版本的.NET 3.5离线安装包(SXS文件)
高效获取Win10系统.NET 3.5离线安装包的5种实战方案 每次重装系统后最头疼的莫过于.NET Framework 3.5的安装问题。微软官方推荐通过Windows更新在线安装,但在实际工作中,我们经常遇到网络不稳定、企业内网限制或需要批量部署的情况。更糟的是ÿ…...
)
OpenHarmony开发板到手后,这5个HDC命令帮你快速上手调试(DAYU200/RK3568实战)
OpenHarmony开发板实战:5个HDC命令快速上手调试 刚拿到OpenHarmony开发板时,很多开发者都会感到既兴奋又迷茫。DAYU200/RK3568作为当前热门的开发平台,其强大的性能与OpenHarmony系统的开放性为创新提供了无限可能。但面对全新的开发环境&…...