ORB-SLAM2第二节---双目地图初始化
比起单目初始化,而双目实现地图的初始化非常简单,只需要一帧(左右目图像)即可完成初始化。
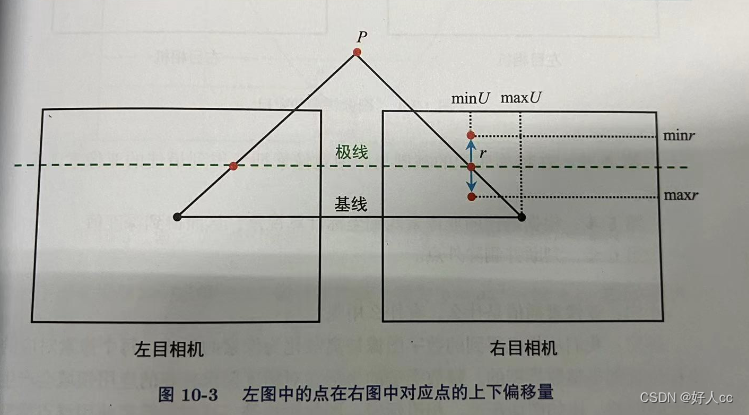
- 行特征点统计。考虑用图像金字塔尺度作为偏移量,在当前点上下正负偏移量(r)内的纵坐标值都认为是匹配点可能存在的行数。之所以这样做,是因为极线矫正后仍然存在一定的误差,通过这种方式可以避免漏匹配。对于左图中极线上的投影像素点,在右图中搜索的纵坐标范围是minr~maxr。
- 粗匹配。在左图中的特征点与右图中的候选匹配点进行逐个比较,得到描述子距离最小的点作为最佳的粗匹配点。根据三维点的距离范围可以将横坐标搜索范围限制在minU~maxU。maxU对应的是三维点位于无穷远处,视差为0时的横坐标,而minU对应的是三维点位于最近距离时的横坐标。
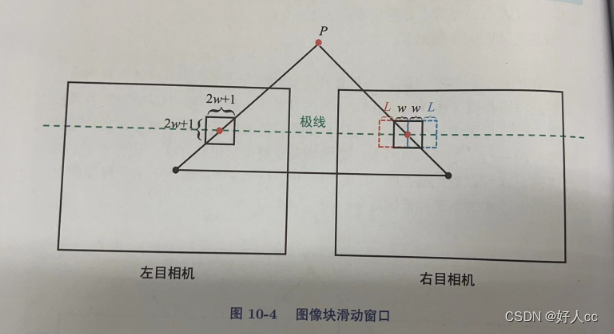
- 在粗匹配的基础上,在图像块滑动窗口内用差的绝对和(Sum of Absolute Differences,SAD)实现精确匹配。此时得到的匹配像素坐标仍然是整数坐标。如图10-4,
/** 双目匹配函数** 为左图的每一个特征点在右图中找到匹配点 \n* 根据基线(有冗余范围)上描述子距离找到匹配, 再进行SAD精确定位 \n ‘* 这里所说的SAD是一种双目立体视觉匹配算法,可参考[https://blog.csdn.net/u012507022/article/details/51446891]* 最后对所有SAD的值进行排序, 剔除SAD值较大的匹配对,然后利用抛物线拟合得到亚像素精度的匹配 \n * 这里所谓的亚像素精度,就是使用这个拟合得到一个小于一个单位像素的修正量,这样可以取得更好的估计结果,计算出来的点的深度也就越准确* 匹配成功后会更新 mvuRight(ur) 和 mvDepth(Z)*/
void Frame::ComputeStereoMatches()
{/*两帧图像稀疏立体匹配(即:ORB特征点匹配,非逐像素的密集匹配,但依然满足行对齐)* 输入:两帧立体矫正后的图像img_left 和 img_right 对应的orb特征点集* 过程:1. 行特征点统计. 统计img_right每一行上的ORB特征点集,便于使用立体匹配思路(行搜索/极线搜索)进行同名点搜索, 避免逐像素的判断.2. 粗匹配. 根据步骤1的结果,对img_left第i行的orb特征点pi,在img_right的第i行上的orb特征点集中搜索相似orb特征点, 得到qi3. 精确匹配. 以点qi为中心,半径为r的范围内,进行块匹配(归一化SAD),进一步优化匹配结果4. 亚像素精度优化. 步骤3得到的视差为uchar/int类型精度,并不一定是真实视差,通过亚像素差值(抛物线插值)获取float精度的真实视差5. 最优视差值/深度选择. 通过胜者为王算法(WTA)获取最佳匹配点。6. 删除离群点(outliers). 块匹配相似度阈值判断,归一化sad最小,并不代表就一定是正确匹配,比如光照变化、弱纹理等会造成误匹配* 输出:稀疏特征点视差图/深度图(亚像素精度)mvDepth 匹配结果 mvuRight*/// 为匹配结果预先分配内存,数据类型为float型// mvuRight存储右图匹配点索引// mvDepth存储特征点的深度信息mvuRight = vector<float>(N,-1.0f);mvDepth = vector<float>(N,-1.0f);// orb特征相似度阈值 -> mean ~= (max + min) / 2const int thOrbDist = (ORBmatcher::TH_HIGH+ORBmatcher::TH_LOW)/2;// 金字塔底层(0层)图像高 nRowsconst int nRows = mpORBextractorLeft->mvImagePyramid[0].rows;// 二维vector存储每一行的orb特征点的列坐标的索引,为什么是vector,因为每一行的特征点有可能不一样,例如// vRowIndices[0] = [1,2,5,8, 11] 第1行有5个特征点,他们的列号(即x坐标)分别是1,2,5,8,11// vRowIndices[1] = [2,6,7,9, 13, 17, 20] 第2行有7个特征点.etcvector<vector<size_t> > vRowIndices(nRows, vector<size_t>());for(int i=0; i<nRows; i++) vRowIndices[i].reserve(200);// 右图特征点数量,N表示数量 r表示右图,且不能被修改const int Nr = mvKeysRight.size();// Step 1. 行特征点统计。 考虑用图像金字塔尺度作为偏移,左图中对应右图的一个特征点可能存在于多行,而非唯一的一行for(int iR = 0; iR < Nr; iR++) {// 获取特征点ir的y坐标,即行号const cv::KeyPoint &kp = mvKeysRight[iR];const float &kpY = kp.pt.y;// 计算特征点ir在行方向上,可能的偏移范围r,即可能的行号为[kpY + r, kpY -r]// 2 表示在全尺寸(scale = 1)的情况下,假设有2个像素的偏移,随着尺度变化,r也跟着变化const float r = 2.0f * mvScaleFactors[mvKeysRight[iR].octave];const int maxr = ceil(kpY + r);const int minr = floor(kpY - r);// 将特征点ir保证在可能的行号中for(int yi=minr;yi<=maxr;yi++)vRowIndices[yi].push_back(iR);}// 下面是 粗匹配 + 精匹配的过程// 对于立体矫正后的两张图,在列方向(x)存在最大视差maxd和最小视差mind// 也即是左图中任何一点p,在右图上的匹配点的范围为应该是[p - maxd, p - mind], 而不需要遍历每一行所有的像素// maxd = baseline * length_focal / minZ// mind = baseline * length_focal / maxZconst float minZ = mb;const float minD = 0; // 最小视差为0,对应无穷远 const float maxD = mbf/minZ; // 最大视差对应的距离是相机的基线// 保存sad块匹配相似度和左图特征点索引vector<pair<int, int> > vDistIdx;vDistIdx.reserve(N);// 为左图每一个特征点il,在右图搜索最相似的特征点irfor(int iL=0; iL<N; iL++) {const cv::KeyPoint &kpL = mvKeys[iL];const int &levelL = kpL.octave;const float &vL = kpL.pt.y;const float &uL = kpL.pt.x;// 获取左图特征点il所在行,以及在右图对应行中可能的匹配点const vector<size_t> &vCandidates = vRowIndices[vL];if(vCandidates.empty()) continue;// 计算理论上的最佳搜索范围const float minU = uL-maxD;const float maxU = uL-minD;// 最大搜索范围小于0,说明无匹配点if(maxU<0) continue;// 初始化最佳相似度,用最大相似度,以及最佳匹配点索引int bestDist = ORBmatcher::TH_HIGH;size_t bestIdxR = 0;const cv::Mat &dL = mDescriptors.row(iL);// Step 2. 粗配准。左图特征点il与右图中的可能的匹配点进行逐个比较,得到最相似匹配点的描述子距离和索引for(size_t iC=0; iC<vCandidates.size(); iC++) {const size_t iR = vCandidates[iC];const cv::KeyPoint &kpR = mvKeysRight[iR];// 左图特征点il与待匹配点ic的空间尺度差超过2,放弃if(kpR.octave<levelL-1 || kpR.octave>levelL+1)continue;// 使用列坐标(x)进行匹配,和stereomatch一样const float &uR = kpR.pt.x;// 超出理论搜索范围[minU, maxU],可能是误匹配,放弃if(uR >= minU && uR <= maxU) {// 计算匹配点il和待匹配点ic的相似度distconst cv::Mat &dR = mDescriptorsRight.row(iR);const int dist = ORBmatcher::DescriptorDistance(dL,dR);//统计最小相似度及其对应的列坐标(x)if( dist<bestDist ) {bestDist = dist;bestIdxR = iR;}}}// Step 3. 图像块滑动窗口用SAD(Sum of absolute differences,差的绝对和)实现精确匹配. if(bestDist<thOrbDist) {// 如果刚才匹配过程中的最佳描述子距离小于给定的阈值// 计算右图特征点x坐标和对应的金字塔尺度const float uR0 = mvKeysRight[bestIdxR].pt.x;const float scaleFactor = mvInvScaleFactors[kpL.octave];// 尺度缩放后的左右图特征点坐标const float scaleduL = round(kpL.pt.x*scaleFactor); const float scaledvL = round(kpL.pt.y*scaleFactor);const float scaleduR0 = round(uR0*scaleFactor);// 滑动窗口搜索, 类似模版卷积或滤波// w表示sad相似度的窗口半径const int w = 5;// 提取左图中,以特征点(scaleduL,scaledvL)为中心, 半径为w的图像块patchcv::Mat IL = mpORBextractorLeft->mvImagePyramid[kpL.octave].rowRange(scaledvL-w,scaledvL+w+1).colRange(scaleduL-w,scaleduL+w+1);IL.convertTo(IL,CV_32F);// 图像块均值归一化,降低亮度变化对相似度计算的影响IL = IL - IL.at<float>(w,w) * cv::Mat::ones(IL.rows,IL.cols,CV_32F);//初始化最佳相似度int bestDist = INT_MAX;// 通过滑动窗口搜索优化,得到的列坐标偏移量int bestincR = 0;//滑动窗口的滑动范围为(-L, L)const int L = 5;// 初始化存储图像块相似度vector<float> vDists;vDists.resize(2*L+1); // 计算滑动窗口滑动范围的边界,因为是块匹配,还要算上图像块的尺寸// 列方向起点 iniu = r0 - 最大窗口滑动范围 - 图像块尺寸// 列方向终点 eniu = r0 + 最大窗口滑动范围 + 图像块尺寸 + 1// 此次 + 1 和下面的提取图像块是列坐标+1是一样的,保证提取的图像块的宽是2 * w + 1// ! 源码: const float iniu = scaleduR0+L-w; 错误// scaleduR0:右图特征点x坐标const float iniu = scaleduR0-L-w;const float endu = scaleduR0+L+w+1;// 判断搜索是否越界if(iniu<0 || endu >= mpORBextractorRight->mvImagePyramid[kpL.octave].cols)continue;// 在搜索范围内从左到右滑动,并计算图像块相似度for(int incR=-L; incR<=+L; incR++) {// 提取右图中,以特征点(scaleduL,scaledvL)为中心, 半径为w的图像快patchcv::Mat IR = mpORBextractorRight->mvImagePyramid[kpL.octave].rowRange(scaledvL-w,scaledvL+w+1).colRange(scaleduR0+incR-w,scaleduR0+incR+w+1);IR.convertTo(IR,CV_32F);// 图像块均值归一化,降低亮度变化对相似度计算的影响IR = IR - IR.at<float>(w,w) * cv::Mat::ones(IR.rows,IR.cols,CV_32F);// sad 计算,值越小越相似float dist = cv::norm(IL,IR,cv::NORM_L1);// 统计最小sad和偏移量if(dist<bestDist) {bestDist = dist;bestincR = incR;}//L+incR 为refine后的匹配点列坐标(x)vDists[L+incR] = dist; }// 搜索窗口越界判断if(bestincR==-L || bestincR==L)continue;// Step 4. 亚像素插值, 使用最佳匹配点及其左右相邻点构成抛物线来得到最小sad的亚像素坐标// 使用3点拟合抛物线的方式,用极小值代替之前计算的最优是差值// \ / <- 由视差为14,15,16的相似度拟合的抛物线// . .(16)// .14 .(15) <- int/uchar最佳视差值// . // (14.5)<- 真实的视差值// deltaR = 15.5 - 16 = -0.5// 公式参考opencv sgbm源码中的亚像素插值公式// 或论文<<On Building an Accurate Stereo Matching System on Graphics Hardware>> 公式7const float dist1 = vDists[L+bestincR-1]; const float dist2 = vDists[L+bestincR];const float dist3 = vDists[L+bestincR+1];const float deltaR = (dist1-dist3)/(2.0f*(dist1+dist3-2.0f*dist2));// 亚像素精度的修正量应该是在[-1,1]之间,否则就是误匹配if(deltaR<-1 || deltaR>1)continue;// 根据亚像素精度偏移量delta调整最佳匹配索引float bestuR = mvScaleFactors[kpL.octave]*((float)scaleduR0+(float)bestincR+deltaR);float disparity = (uL-bestuR);if(disparity>=minD && disparity<maxD) {// 如果存在负视差,则约束为0.01if( disparity <=0 ) {disparity=0.01;bestuR = uL-0.01;}// 根据视差值计算深度信息// 保存最相似点的列坐标(x)信息// 保存归一化sad最小相似度// Step 5. 最优视差值/深度选择.mvDepth[iL]=mbf/disparity;mvuRight[iL] = bestuR;vDistIdx.push_back(pair<int,int>(bestDist,iL));} }}// Step 6. 删除离群点(outliers)// 块匹配相似度阈值判断,归一化sad最小,并不代表就一定是匹配的,比如光照变化、弱纹理、无纹理等同样会造成误匹配// 误匹配判断条件 norm_sad > 1.5 * 1.4 * mediansort(vDistIdx.begin(),vDistIdx.end());const float median = vDistIdx[vDistIdx.size()/2].first;const float thDist = 1.5f*1.4f*median;for(int i=vDistIdx.size()-1;i>=0;i--) {if(vDistIdx[i].first<thDist)break;else {// 误匹配点置为-1,和初始化时保持一直,作为error codemvuRight[vDistIdx[i].second]=-1;mvDepth[vDistIdx[i].second]=-1;}}
}相关文章:
ORB-SLAM2第二节---双目地图初始化
比起单目初始化,而双目实现地图的初始化非常简单,只需要一帧(左右目图像)即可完成初始化。 行特征点统计。考虑用图像金字塔尺度作为偏移量,在当前点上下正负偏移量(r)内的纵坐标值都认为是匹配点可能存在…...

后端常使用的中间件知识点--持续更新
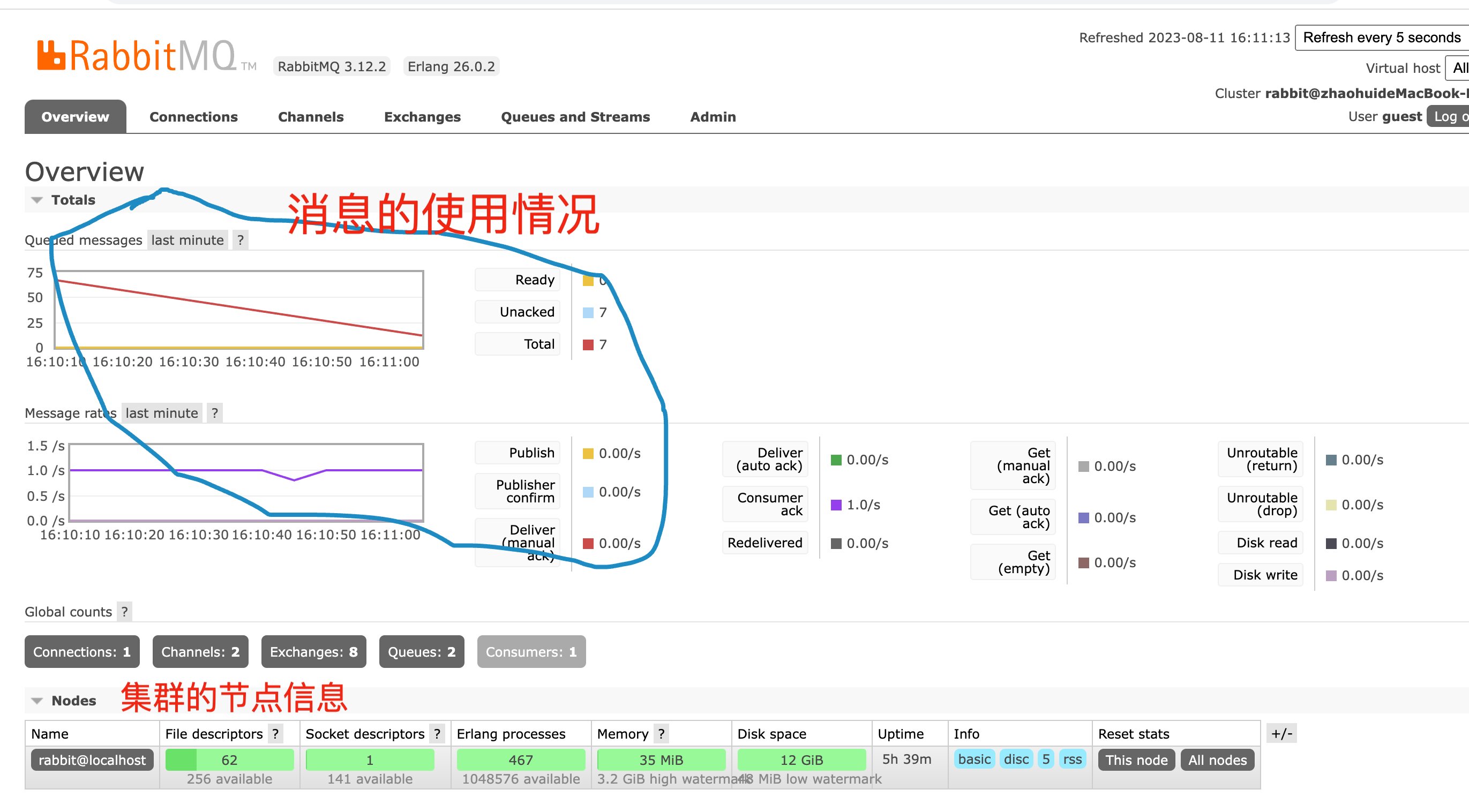
类型难度mysqlmysql中SQL优化:多角度分析包学包会,sql优化全过程,刨根分析redis多角度剖析redis数据结构及底层实现原理、应用场景MQ简单大体说明RabbitMQ的使用(简单版)mybatis使用JDBC的批量插入百万数据要多少秒一遍…...

非科班的大家如何顺滑转码
近年来,很多人想要从其他行业跳槽转入计算机领域。非计算机科班如何丝滑转码?请来聊聊你的看法和观点,我本身是信息与计算科学专业,周围的同学有不少也是被这个名字“骗过来的”,看这个名字都以为是计算机相关专业&…...

webpack中常见的Loader
目录 1.webpack中的loader是什么?配置方式 2. loader特性3.常见的loader 1.webpack中的loader是什么? loader 用于对模块的"源代码"进行转换,在 import 或"加载"模块时预处理文件 webpack做的事情,仅仅是分…...
RabbitMQ:可靠消息传递的强大消息中间件
消息中间件在现代分布式系统中起着关键作用,它们提供了一种可靠且高效的方法来进行异步通信和解耦。在这篇博客中,我们将重点介绍 RabbitMQ,一个广泛使用的开源消息中间件。我们将深入探讨 RabbitMQ 的特性、工作原理以及如何在应用程序中使用…...

python 批量下载m3u8的视频
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家:点击跳转 方法: 解析m3u8,获取其中的ts列表,多线程下载所有ts文件。 全部下完之后,用ffmpeg合…...

最后一击
第二届上海市青少年算法竞赛(小学组) 题目描述 Description 小爱和小艾两人组队打一只怪兽。一开始怪兽有 n 点生命值,当 n 变成 0 或更低时,怪兽就被消灭了。他们两人是同时开始攻击的,小爱每分钟可以攻击 a 下&…...

K8S资源管理方式
K8S资源管理方式 文章目录 K8S资源管理方式一、陈述式资源管理1.基础命令操作2.创建pod3.查看资源状态4.查看pod中的容器日志5.进入pod中的容器6.删除pod资源7.pod扩容8.项目生命周期管理(创建-->发布-->更新-->回滚-->删除)8.1创建services…...

第三章 图论 No.9有向图的强连通与半连通分量
文章目录 定义Tarjan求SCC1174. 受欢迎的牛367. 学校网络1175. 最大半连通子图368. 银河 定义 连通分量是无向图的概念,yxc说错了,不要被误导 强连通分量:在一个有向图中,对于分量中的任意两点u,v,一定能从…...

回归预测 | MATLAB实现基于PSO-LSSVM-Adaboost粒子群算法优化最小二乘支持向量机结合AdaBoost多输入单输出回归预测
回归预测 | MATLAB实现基于PSO-LSSVM-Adaboost粒子群算法优化最小二乘支持向量机结合AdaBoost多输入单输出回归预测 目录 回归预测 | MATLAB实现基于PSO-LSSVM-Adaboost粒子群算法优化最小二乘支持向量机结合AdaBoost多输入单输出回归预测预测效果基本介绍模型描述程序设计参考…...

Mysql 和Oracle的区别
、mysql与oracle都是关系型数据库,Oracle是大型数据库,而MySQL是中小型数据库。但是MySQL是开源的,但是Oracle是收费的,而且比较贵。 1 2 mysql默认端口:3306,默认用户:root oracle默认端口&…...

在收藏夹里“积灰”的好东西——“收藏从未停止,行动从未开始”
方向一:分享一道你收藏的好题 小雅兰刚学数据结构与算法的时候,学的真的是很吃力,感觉链表真的特别的难,在学习了后面的知识之后,发现链表慢慢变得简单了,若是放在现在,小雅兰仍然觉得链表的知…...

【算法|数组】双指针
算法|数组——双指针 引入 给你一个按 非递减顺序 排序的整数数组 nums,返回 每个数字的平方 组成的新数组,要求也按 非递减顺序 排序。 示例 1: 输入:nums [-4,-1,0,3,10] 输出:[0,1,9,16,100] 解释:…...

asp.net core6 webapi 使用反射批量注入接口层和实现接口层的接口的类到ioc中
IBLL接口层类库 namespace IBLL {public interface ICar{string CarName();} } namespace IBLL {public interface IRed{string RedName();} }BLL实现接口层类库 namespace BLL {public class Car : ICar{public string CarName(){return "BBA";}} } namespace BLL…...

【2023】字节跳动 10 日心动计划——第九关
目录 1. 螺旋矩阵2. 划分字母区间3. 子集 II 1. 螺旋矩阵 🔗 原题链接:54. 螺旋矩阵 类似于BFS那样使用方向数组即可。 class Solution { public:vector<int> spiralOrder(vector<vector<int>>& matrix) {int m matrix.size(), …...
小龟带你敲排序之冒泡排序
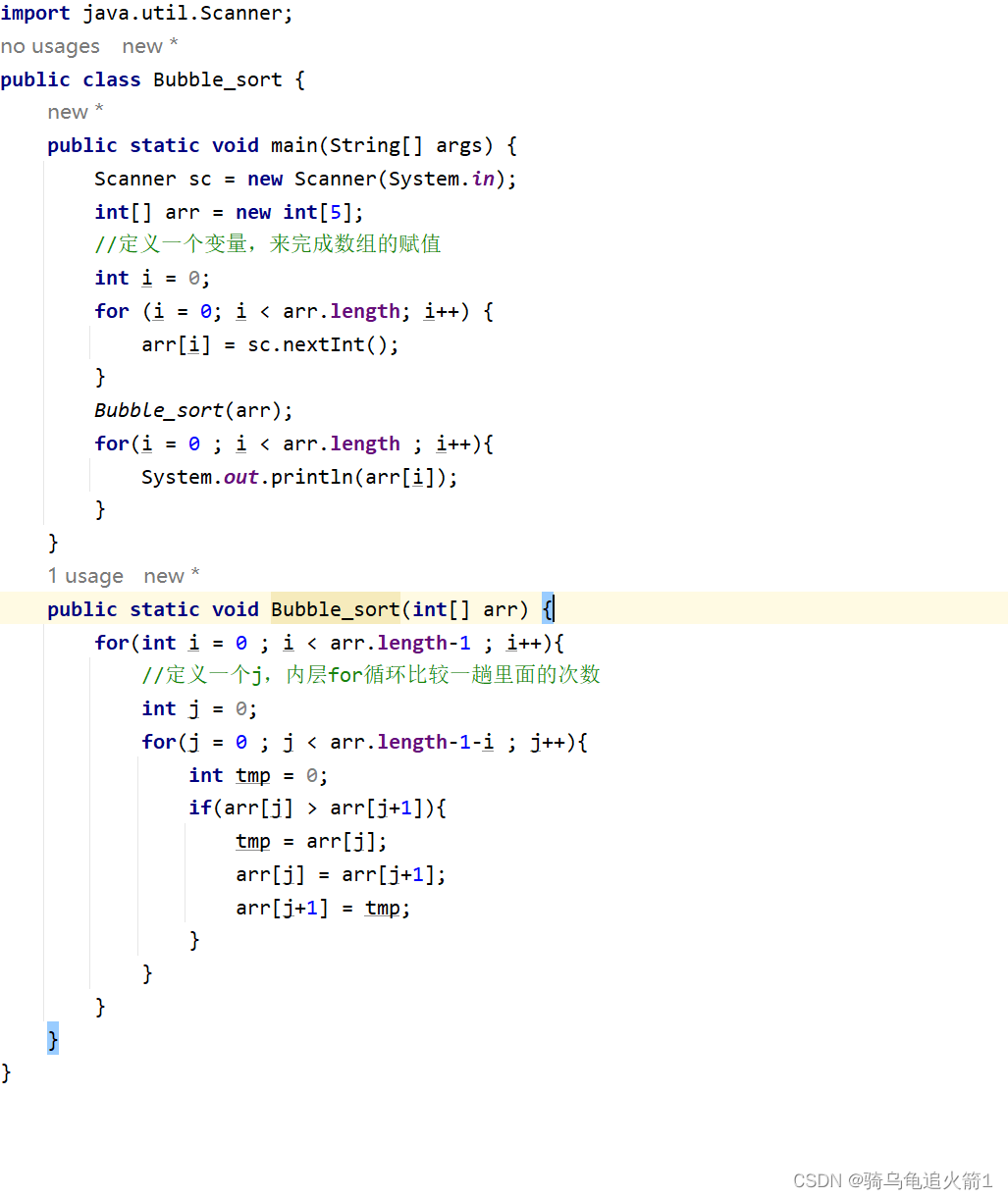
冒泡排序 一. 定义二.题目三. 思路分析(图文结合)四. 代码演示 一. 定义 冒泡排序(Bubble Sort,台湾译为:泡沫排序或气泡排序)是一种简单的排序算法。它重复地走访过要排序的数列,一次比较两个元…...
Nacos AP架构集群搭建(Windows)
手写SpringCloud项目地址,求个star github:https://github.com/huangjianguo2000/spring-cloud-lightweight gitee:https://gitee.com/huangjianguo2000/spring-cloud-lightweigh 目录: 一:初始化MySQL 二:复制粘贴三份Nacos文…...

nodejs+vue+elementui,图书评论管理系统_g9e3a
用户的功能主要是对首页、图书信息、公告信息、在线咨询、个人中心等进行操作。表名:token语言 node.js 框架:Express 前端:Vue.js 数据库:mysql 数据库工具:Navicat 开发软件:VScode 前端nodejsvueelementui, 管理员…...
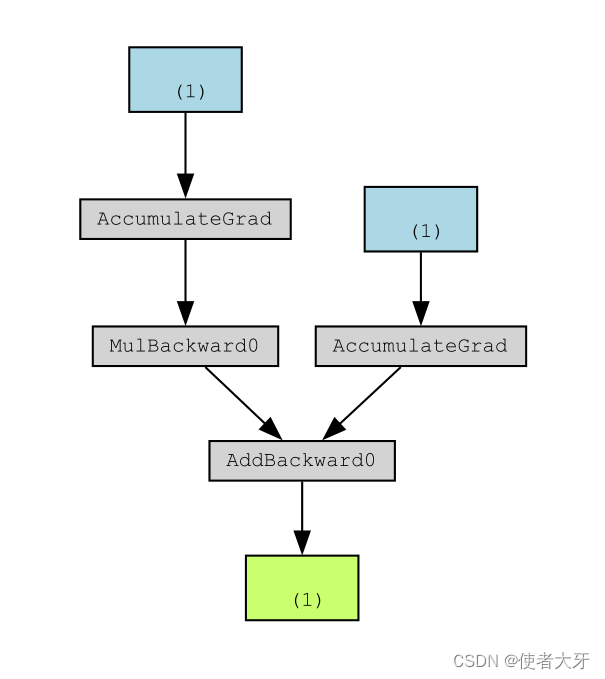
基于TorchViz详解计算图(附代码)
文章目录 0. 前言1. 计算图是什么?2. TorchViz的安装3. 计算图详解 0. 前言 按照国际惯例,首先声明:本文只是我自己学习的理解,虽然参考了他人的宝贵见解,但是内容可能存在不准确的地方。如果发现文中错误,…...

解决GitHub的速度很慢的几种方式
1. GitHub 镜像访问 这里提供两个最常用的镜像地址: https://hub.njuu.cf/search https://www.gitclone.com/gogs/search/clonesearch 也就是说上面的镜像就是一个克隆版的 GitHub,你可以访问上面的镜像网站,网站的内容跟 GitHub 是完整同步…...
)
Python实战:5分钟搞定PANN声音检测模型部署(附完整代码)
Python极速部署指南:5分钟玩转PANN声音检测模型 当你在深夜加班时,突然听到窗外传来奇怪的声响;当你在整理家庭录像时,需要快速标记出所有包含婴儿笑声的片段;当你开发智能家居系统时,希望设备能自动识别门…...

Go语言的依赖管理
Go语言的依赖管理 1. 依赖管理的基础概念 1.1 什么是依赖管理 依赖管理是指管理项目依赖的第三方库和模块的过程包括依赖的添加、更新、移除和版本控制确保项目在不同环境中能够正确构建和运行 1.2 Go语言依赖管理的发展 GOPATH模式:早期的依赖管理方式Go Modules&a…...

开发者投资指南:软件测试人员的专业投资之道
当测试思维遇见投资世界 在代码与系统的交界处,软件测试从业者早已练就独特的风险嗅觉和稳定性评估能力。这些专业素养正成为投资领域的稀缺资源。本文将从测试工程师的专业视角出发,解析股票、加密货币与NFT三大投资领域的核心逻辑,揭示如何…...
)
为什么你的Qwen2-VL在Jetson AGX Orin上跑不出3FPS?——揭秘多模态实时推理中被低估的ViT Patch Embedding内存带宽墙(附NVLink微调参数表)
第一章:多模态大模型实时处理能力 2026奇点智能技术大会(https://ml-summit.org) 多模态大模型的实时处理能力正成为边缘AI与交互式智能系统落地的核心瓶颈。当视觉、语音、文本与传感器信号需在毫秒级完成对齐、融合与推理时,传统批处理范式与静态图优…...

揭秘90%团队踩坑的多模态标注断点:从图像-文本-语音对齐失败到端到端一致性保障的7个关键控制点
第一章:多模态标注断点的本质与行业影响全景 2026奇点智能技术大会(https://ml-summit.org) 多模态标注断点并非简单的流程中断,而是跨模态对齐失效、语义一致性崩塌与人工干预阈值被突破的复合性系统现象。当图像、文本、语音、时序传感器数据在联合标…...

CXPatcher终极指南:如何一键优化CrossOver游戏兼容性
CXPatcher终极指南:如何一键优化CrossOver游戏兼容性 【免费下载链接】CXPatcher A patcher to upgrade Crossover dependencies and improve compatibility 项目地址: https://gitcode.com/gh_mirrors/cx/CXPatcher CXPatcher是专为CrossOver用户设计的终极…...
)
深度学习机器学习基础最大似然与贝叶斯统计(十九)
1. 定位导航 前面几篇讲了怎么衡量一个模型好不好(偏差、方差、过拟合)。本篇回答更深层的问题:损失函数从哪里来? 答案是最大似然估计——训练神经网络的所有损失函数(MSE、交叉熵、NLL)本质上都是 MLE 在不同概率模型假设下的具体形式。 2. 最大似然估计(Maximum L…...

Dell服务器远程管理翻车实录:BMC能登,ipmitool却报错?原来是BIOS里这个开关没开
Dell服务器IPMI故障排查实录:当BMC能登而ipmitool罢工时 那是一个再普通不过的运维值班夜,直到监控系统突然报警——某台关键业务Dell R740服务器失去响应。我熟练地打开浏览器,输入BMC IP地址,输入管理员凭证,Web界面…...

魔兽争霸III兼容性修复工具:WarcraftHelper让经典游戏在Windows 11完美运行
魔兽争霸III兼容性修复工具:WarcraftHelper让经典游戏在Windows 11完美运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸…...

2026年人工智能AI原生型公司:面向规模化AI应用的企业架构设计研究报告
原文链接:https://tecdat.cn/?p45493原文出处:拓端抖音号拓端tecdat关于分析师在此对 YouMing Zhang 对本文所作的贡献表示诚挚感谢,他在东北大学完成了信息与计算科学专业的学士学位,专注人工智能领域。擅长机器学习、深度学习算…...