matlab机器人工具箱基础使用
资料:https://blog.csdn.net/huangjunsheng123/article/details/110630665
用vscode直接看工具箱api代码比较方便,代码说明很多
一、模型设置
1、基础效果
%采用机器人工具箱进行正逆运动学验证
a=[0,-0.3,-0.3,0,0,0];%DH参数
d=[0.05,0,0,0.06,0.05,0.04];
alp=[pi/2,0,0,pi/2,-pi/2,0];
%机器人工具箱模型,每一个L建立一个连杆,输入DH参数即可,offset是连杆的初始偏移量,此处为0
L(1) = Link('d', d(1), 'a', a(1), 'alpha', alp(1));
L(2) = Link('d', d(2), 'a', a(2), 'alpha', alp(2), 'offset', 0 );
L(3) = Link('d', d(3), 'a', a(3), 'alpha', alp(3), 'offset', 0 );
L(4) = Link('d', d(4), 'a', a(4), 'alpha', alp(4), 'offset',0);
L(5) = Link('d', d(5), 'a', a(5), 'alpha', alp(5));
L(6) = Link('d', d(6), 'a', a(6), 'alpha', alp(6));
bot = SerialLink(L,'name','rbt');%将六个连杆组合起来
figure(1)
bot.display();%显示机器人模型
view(3)
bot.teach;
2、link的常用属性
运动学参数
% theta kinematic: joint angle 关节角度
% d kinematic: link offset
% a kinematic: link length
% alpha kinematic: link twist % jointtype kinematic: 'R' if revolute, 'P' if prismatic 关节类型
% mdh kinematic: 0 if standard D&H, else 1 参数类型(标准/改进)
% offset kinematic: joint variable offset 关节变量偏移量(设置新零点)
% qlim kinematic: joint variable limits [min max] 关节变量限制范围
动力学参数
% m dynamic: link mass 连杆质量
% r dynamic: link COG wrt link coordinate frame 3x1 质心
% I dynamic: link inertia matrix, symmetric 3x3, about link COG. 惯性张量
% B dynamic: link viscous friction (motor referred) 连杆粘性摩擦
% Tc dynamic: link Coulomb friction 连杆库仑摩擦
%-
% G actuator: gear ratio 减速比
% Jm actuator: motor inertia (motor referred) 电机惯量二、运动学
1、正逆运动学
q=[1,-1,1,-1,1,1];%给定初始角度
T_rbt = bot.fkine(q);%采用机器人工具箱函数求正运动学
q_rbt = bot.ikine(T_rbt,'q0',q)%采用RTB的逆运动学计算上边得到的齐次矩阵对应的关节角度,给定初始值可以更快的收敛到给定的角度2、雅各比矩阵
bot.jacob0() 关于绝对坐标系的雅各比矩阵
bot.jacobn() 关于工作坐标系的雅各比矩阵三、动力学
1、查看动力学参数
bot.dyn()
2、正逆动力学
bot.nofriction() //无摩擦力动力学模型
bot.accel(角度,角速度,外力矩阵) //计算关节加速度bot.fdyn(时间,外力矩阵) //正动力学
bot.rne(角度,角速度,角加速度,重力加速度,输出动力要求) //逆动力学
3、计算动力学方程
bot.gravload() //G
bot.inertia() //M
bot.coriolis() //V
bot.payload() //有效载荷
四、例子:二自由度平面机械臂
syms Ix1 Iy1 Iz1 Ix2 Iy2 Iz2
syms q1 q2 m1 m2 L1 L2
syms qd1 qd2 g
%%%%%%%%%%%%%%%%%%%1、设置运动学参数%%%%%%%%%%%%%%%%%%%
a=[0,L1,L2];%DH参数
d=[0,0,0];
alp=[0,0,0];q = [q1,q2,0];
qd = [qd1,qd2,0];L(1) = Link('d', d(1), 'a', a(1), 'alpha', alp(1),'modified'); %'modified'代表使用改进dh法
L(2) = Link('d', d(2), 'a', a(2), 'alpha', alp(2),'modified');
L(3) = Link('d', d(3), 'a', a(3), 'alpha', alp(3),'modified');
bot = SerialLink(L,'name','rbt'); %将三个连杆组合起来,形成机器人
%%%%%%%%%%%%%%%%%%%2、设置动力学参数%%%%%%%%%%%%%%%%%%%
%质量
bot.links(1).m=m1;
bot.links(2).m=m2;
bot.links(3).m=0;
%质心
bot.links(1).r=[L1/2,0,0];
bot.links(2).r=[L2/2,0,0];
bot.links(3).r=[0,0,0];
%转动惯量
bot.links(1).I = [Ix1, Iy1, Iz1, 0, 0,0];
bot.links(2).I= [Ix2, Iy2, Iz2,0, 0,0];
bot.links(3).I = [0, 0, 0, 0, 0,0];
%重力
bot.gravity=[0;0;-g];bot.dyn(); %显示所有杆的动力学参数
%%%%%%%%%%%%%%%%%%%3、计算运动学参数%%%%%%%%%%%%%%%%%%%
T = bot.fkine(q); %机器人正运动学,输入关节角度,输出T_e^0
J = bot.jacob0(q); %计算雅各比矩阵,基于世界坐标的
%%%%%%%%%%%%%%%%%%%4、计算动力学参数%%%%%%%%%%%%%%%%%%%
M = bot.inertia(q); %关节空间质量矩阵
V = bot.coriolis(q,qd); %计算离心力和科氏力矢量,注意这里给出的是矩阵V,V*qd才等于计算出的向量V(qd)
G = bot.gravload(q); %重力矢量
%%%%%%%%%%%%%%%%%%%5、正逆运动学%%%%%%%%%%%%%%%%%%%
%逆运动学,角度(不是微分运动学)
theta1 = bot.ikine(T,'mask',[1,1,1,0,0,0],'q0',[0,0,0]); %T代表的是工作点的位姿,输出各个关节角度,q0是基座坐标,mask是关节小于6个时选择开启的
theta2 = bot.ikunc(T);
%%正逆微分运动学
%%%%%%%%%%%%%%%%%%%6、正逆动力学%%%%%%%%%%%%%%%%%%%
bot_nf=bot.nofriction(); %设置没有摩擦力 %其实就是根据关节力矩和作用力矩+初始q和qd算qdd,再根据qdd更新q和qd
%句柄那里不可以用[1,2,3,4,5,6]这样赋值了,可以直接给[]就是不给力
%0.4是时间间隔,@函数句柄(函数需要特别设置,因为要解算方程),第一个qz是q0,第二个qz是qd0,5和1就是函数句柄的参数
%输出就是一系列t、q、qd[t q qd] = p560.nofriction().fdyn(0.4, @test1, qz,qz,5,1);torqfun = [0,30,6]; %设定一组关节力
qdd = bot_nf.accel(q(i,:),qd(i,:),torqfun); %获得中间量的办法,fdyn应该调用了accelfprintf("-----------------------")
%逆动力学
tau = bot.rne(q, qd, qdd, 'gravity',[0,9.8,0],'fext',[0,0,0,0,0,0]);%fext是外力test1.m
function tau = test1(t,q,qd,qstar,P,D)
tau=P*(qstar-q) + D*qd;
tau =[0,0,0,0,0,0];
end
相关文章:

matlab机器人工具箱基础使用
资料:https://blog.csdn.net/huangjunsheng123/article/details/110630665 用vscode直接看工具箱api代码比较方便,代码说明很多 一、模型设置 1、基础效果 %采用机器人工具箱进行正逆运动学验证 a[0,-0.3,-0.3,0,0,0];%DH参数 d[0.05,0,0,0.06,0.05,…...

利用WonderLeak进行内存泄露检测【一】
1、下载地址: WonderLeak - Visual Studio Marketplace https://www.relyze.com/ 2、WonderLeak支持vs2017 2019扩展,或者单独启动 3、https://www.relyze.com/docs/wonderleak/help/w/overview/msvc_extension1.png 4、对于二进制程序来说支持以下…...
,思维题)
二刷LeetCode--155. 最小栈(C++版本),思维题
思路:本题需要使用两个栈,一个就是正常栈,执行出入操作,另一个栈只负责将对应的最小值进行保存即可.每次入栈的时候,最小值栈的栈顶也需要入栈元素,不过这个元素是最小值,那么就需要进行比较,因此在getmin()的时候只需要将最小值栈的栈顶元素弹出即可.初始化的时候只需要将最小…...

进程的状态与转换
进程在其生命周期内,由于系统中各进程之间的相互制约及系统的运行环境的变化,使得进程的状态也在不断地发生变化。通常进程有以下5种状态,前三种是基础讷航的基本状态 1)运行态。进程正在处理机上运行。在单处理机机中࿰…...

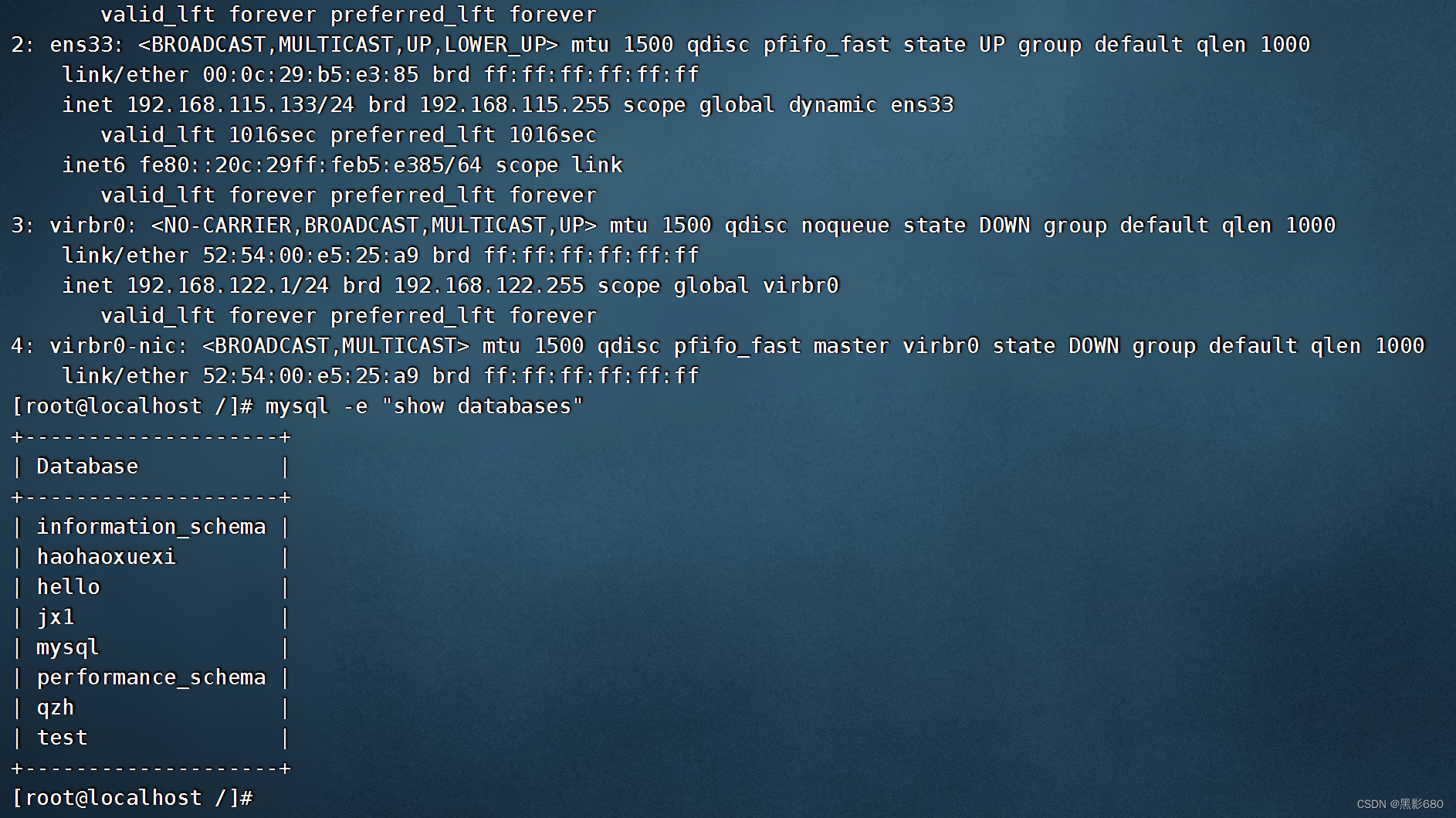
用MariaDB创建数据库,SQL练习,MarialDB安装和使用
前言:MariaDB数据库管理系统是MySQL的一个分支,主要由开源社区在维护,采用GPL授权许可 MariaDB的目的是完全兼容MySQL,包括API和命令行,使之能轻松成为MySQL的代替品。在存储引擎方面,使用XtraDB来代替MySQ…...
【Docker】 使用Docker-Compose 搭建基于 WordPress 的博客网站
引 本文将使用流行的博客搭建工具 WordPress 搭建一个私人博客站点。部署过程中使用到了 Docker 、MySQL 。站点搭建完成后经行了发布文章的体验。 WordPress WordPress 是一个广泛使用的开源内容管理系统(CMS),用于构建和管理网站、博客和…...
Hlang社区-前端社区宣传首页实现
文章目录 前言页面结构固定钉头部轮播JS特效完整代码总结前言 这里的话,博主其实也是今年参与考研的大军之一,所以的话,是抽空去完成这个项目的,当然这个项目的肯定是可以在较短的时间内完成的。 那么废话不多说,昨天也是干到1点多,把这个首页写出来了。先看看看效果吧:…...

【LeetCode-Medium】833. 字符串中的查找与替换
题目链接 833. 字符串中的查找与替换 标签 字符串 步骤 Step1. 初始化 ans[]: for (int i 0; i < s.length(); i) { // 初始化ansans[i] s[i]; }Step2. 根据 index, source, target 查找;如果找到,那么将 ans[i] 更改为 target&am…...

数据结构中公式前中后缀表达式-二叉树应用
目录 数据结构中公式前中后缀表达式-二叉树应用 数据结构中公式前中后缀表达式-二叉树应用 什么是前缀表达式、中缀表达式、后缀表达式 前缀表达式、中缀表达式、后缀表达式,是通过树来存储和计算表达式的三种不同方式 以如下公式为例 通过树来存储该公式&#x…...
Visual Studio 2022连接远程系统进行C/C++开发
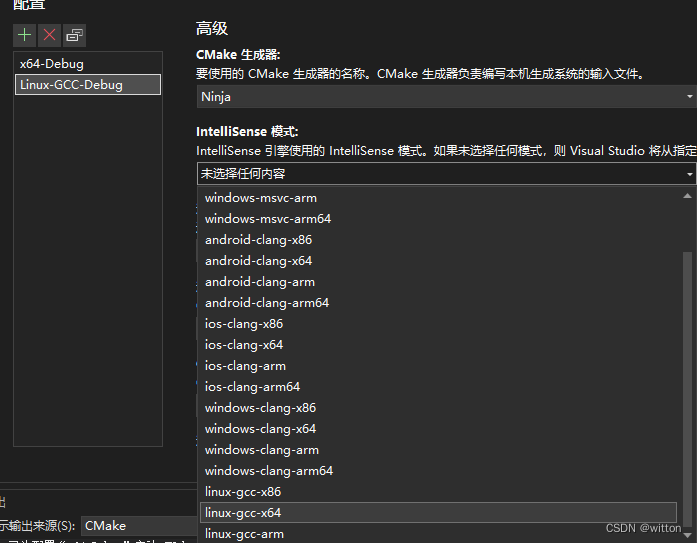
Visual Studio被称为是宇宙最强IDE,以前开发Linux C/C服务器程序,基本上都是在Windows上使用VS编写跨平台的C/C代码,然后先在VS中编译、链接、调试,然后在Linux下编译、链接,再针对Linux下的特定代码进行调试。后面Vis…...

TiDB数据库从入门到精通系列之二:TiDB数据库的简介
TiDB数据库从入门到精通系列之二:TiDB数据库的简介 一、TiDB数据库的简介二、五大核心特性三、四大核心应用场景四、TiDB数据库与MySQL数据库的兼容性 一、TiDB数据库的简介 TiDB是开源分布式关系型数据库,是一款同时支持在线事务处理与在线分析处理 (H…...

opencv视频截取每一帧并保存为图片python代码CV2实现练习
当涉及到视频处理时,Python中的OpenCV库提供了强大的功能,可以方便地从视频中截取每一帧并将其保存为图片。这是一个很有趣的练习,可以让你更深入地了解图像处理和多媒体操作。 使用OpenCV库,你可以轻松地读取视频文件࿰…...

虹科方案 | 汽车总线协议转换解决方案(二)
上期说到,虹科的PCAN-LIN网关在CAN、LIN总线转换方面有显著的作用,尤其是为BMS电池通信的测试提供了优秀的解决方案。假如您感兴趣,可以点击文末相关链接进行回顾! 而今天,虹科将继续给大家带来Router系列在各个领域的…...

[Android] 通过JNI 让 JAVA 调用 android native 接口
前言: JNI (java native interface) 是一个库,可以让 java 代码和其他语言互动,比如 java 通过 JNI 调用融合了 jni库的 c/c 代码,注意,这里要求 c/c代码中必须通过链接 jni 库并按照 JNI 规范定义一套可供 JAVA 调用…...
MySQL高可用MHA
目录 前言 一、概述 二、配置免密、组从复制 三、MHA配置 四、测试 总结 前言 MySQL高可用管理工具(MHA,Master High Availability)是一个用于自动管理MySQL主从复制的工具,它可以提供高可用性和自动故障转移。MHA由原版的MHA工具…...
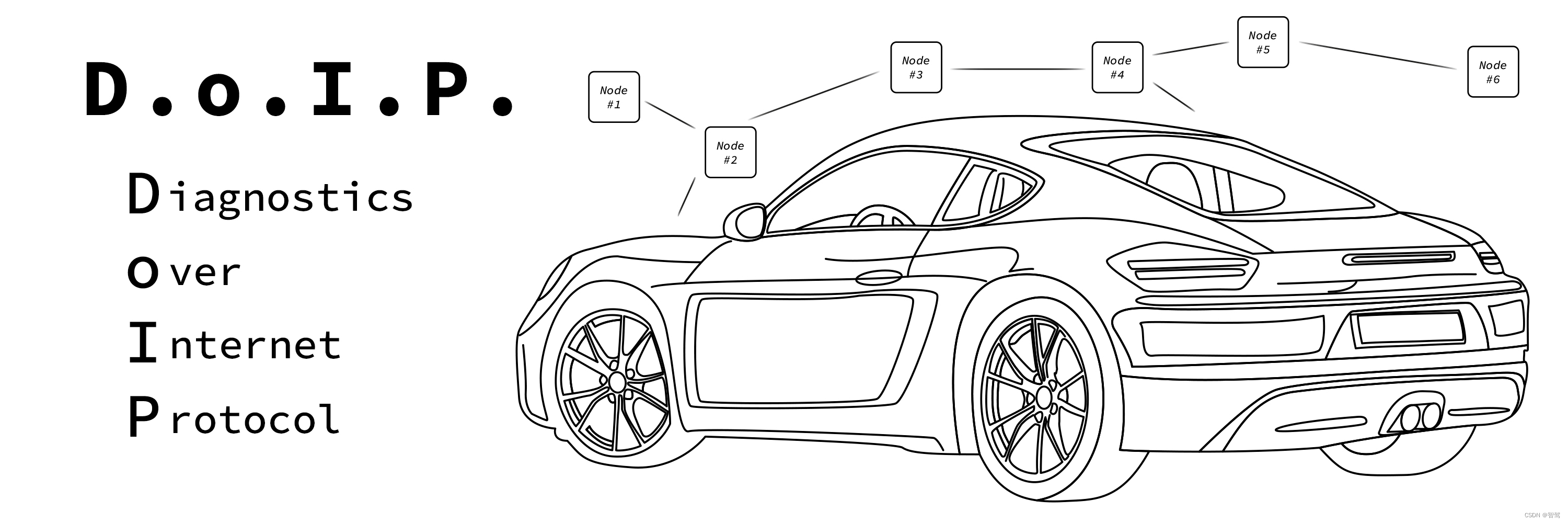
DoIP学习笔记系列:(五)“安全认证”的.dll从何而来?
文章目录 1. “安全认证”的.dll从何而来?1.1 .dll文件base1.2 增加客户需求算法传送门 DoIP学习笔记系列:导航篇 1. “安全认证”的.dll从何而来? 无论是用CANoe还是VFlash,亦或是编辑cdd文件,都需要加载一个与$27服务相关的.dll(Windows的动态库文件),这个文件是从哪…...
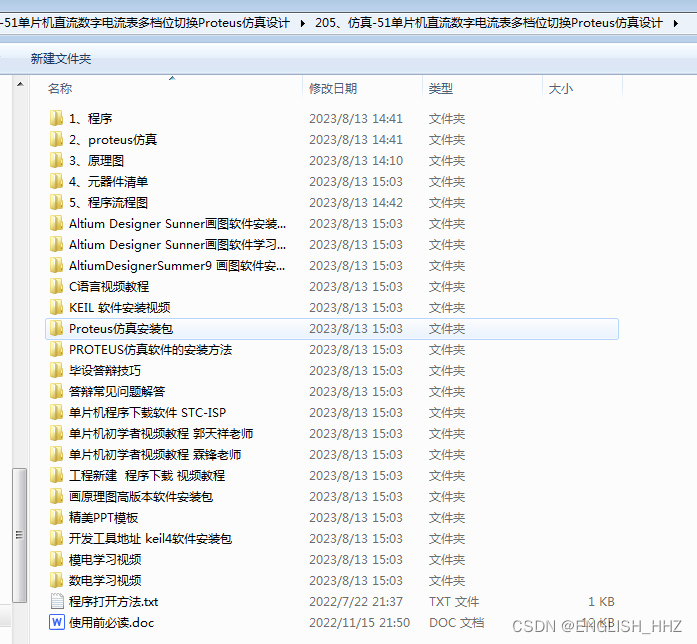
205、仿真-51单片机直流数字电流表多档位切换Proteus仿真设计(程序+Proteus仿真+原理图+流程图+元器件清单+配套资料等)
毕设帮助、开题指导、技术解答(有偿)见文未 目录 一、硬件设计 二、设计功能 三、Proteus仿真图 四、原理图 五、程序源码 资料包括: 方案选择 单片机的选择 方案一:STM32系列单片机控制,该型号单片机为LQFP44封装,内部资源…...
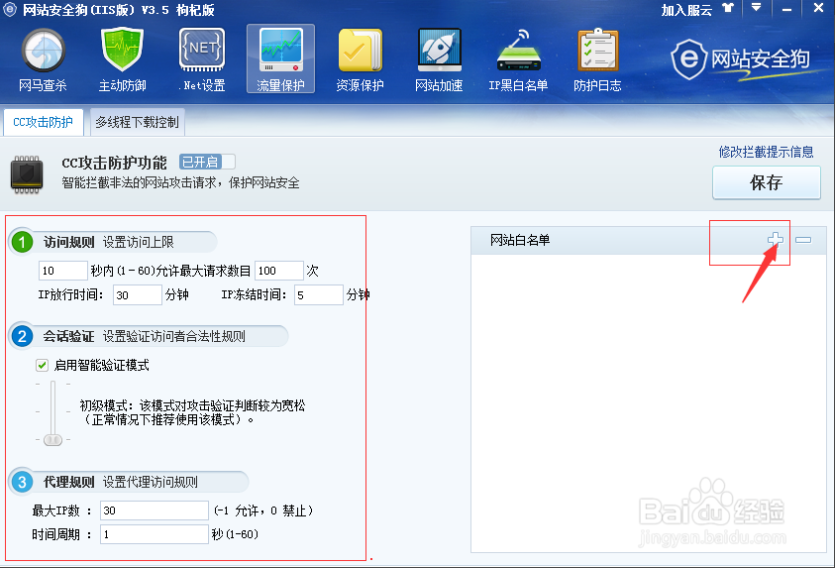
服务器如何防止cc攻击
对于搭载网站运行的服务器来说,cc攻击应该并不陌生,特别是cc攻击的攻击门槛非常低,有个代理IP工具,有个cc攻击软件就可以轻易对任何网站发起攻击,那么服务器如何防止cc攻击?请看下面的介绍。 服务器如何防止cc攻击&a…...
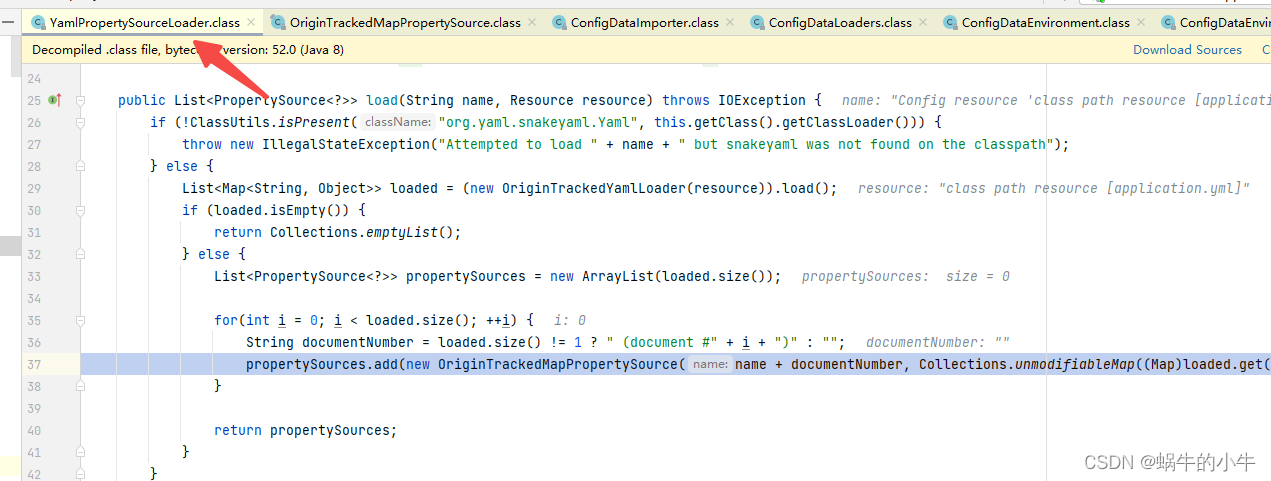
解读注解@Value占位符替换过程
之前写过一篇关于介绍Spring占位符替换原理的博客,传送门 :Spring的占位符是怎么工作的 在这篇文章基础上,再介绍一下Value替换原理,两篇文章有一定的相关性。 继续以上一篇的工程为例,项目结构一样,这里就…...

浅谈5G技术会给视频监控行业带来的一些变革情况
5G是第五代移动通信技术,能够提供更高的带宽和更快的传输速度,这将为视频技术的发展带来大量机会。随着5G技术的逐步普及与商用,人们将能够享受到更加流畅的高清视频体验,并且5G技术还拥有更低的延迟和更高的网络容量。这些优势不…...

企业数字化破局:AI低代码为何是唯一刚需?
聊企业数字化转型,现在最绕不开的就是AI低代码。但很多技术人仍有偏见:“低代码低技术”“AI能写代码,没必要用低代码”“中小企业用不起,大企业用不上”。真相很扎心:信通院2026年数据显示,AI低代码化率已…...

如何快速掌握拯救者工具箱:联想笔记本性能调校终极指南
如何快速掌握拯救者工具箱:联想笔记本性能调校终极指南 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionToolkit 还在为联…...

从‘三调’到‘新国标’:深度解读用地分类演变背后的GIS数据处理逻辑与避坑指南
从‘三调’到‘新国标’:深度解读用地分类演变背后的GIS数据处理逻辑与避坑指南 当规划师第一次打开2020年11月版的《用地用海分类指南》,看到169种地类时,很多人会下意识倒吸一口冷气——这比2月版的132种足足多出37个细分项。这种"直男…...

集成网口设计全攻略:带磁性RJ45的选型、PoE适配与EMC布局实战
📌 摘要: 集成网口(带网络变压器的RJ45连接器)将隔离变压器、共模扼流圈和RJ45插座合为一体,极大简化了以太网物理层设计。但不同PHY驱动类型、PoE功率等级、EMC性能要求以及工业环境振动等因素,都直接影响…...

uView 2.0自定义主题开发:颜色配置与样式覆盖的详细步骤
uView 2.0自定义主题开发:颜色配置与样式覆盖的详细步骤 【免费下载链接】uView2.0 uView UI,是全面兼容nvue的uni-app生态框架,全面的组件和便捷的工具会让您信手拈来,如鱼得水 项目地址: https://gitcode.com/gh_mirrors/uv/u…...

SVM实战调参指南:从标准化、核函数到支持向量解读
1. 这不是教科书里的SVM,而是我亲手调过37次参数后才敢写的入门实录Support Vector Machine(SVM)这个词,第一次见是在三年前的某次算法面试里。面试官问:“你说说SVM为什么叫‘支持向量’?”我张了张嘴&…...

毫米波高汇聚空馈天线技术【附方案】
✨ 长期致力于透射阵天线、高增益、宽角波束扫描、共形设计、近场赋形研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)低剖面透射阵天线设计ÿ…...

38 - Go 命令行参数处理:从 os.Args 到 flag 的底层设计
文章目录38 - Go 命令行参数处理:从 os.Args 到 flag 的底层设计为什么需要命令行参数?命令行参数的本质最基础的参数处理:os.Args基础使用示例获取单个参数flag 标准库:Go 官方参数解析器最简单的 flag 示例为什么 flag.String 返…...

大模型不再“一本正经地胡说八道”!揭秘RAG如何让AI「有据可查」
RAG(Retrieval-Augmented Generation)是一种结合信息检索与文本生成的AI架构,通过让大语言模型在回答问题前先查找外部知识库,有效缓解幻觉问题,并确保答案基于最新、专有数据。RAG通过文档切块、向量嵌入、向量检索和…...

2026网盘横评:国民级云盘领衔,这几款备选也值得一看
前言作为长期接触AI资源、代码项目、大文件存储的从业者,日常高频使用各类网盘。很多朋友都会纠结主流网盘该如何选择,不同产品的存储能力、传输表现、功能适配差距明显。本文摒弃夸张测评,以客观分享的视角,从传输、存储、功能、…...