Linux交叉编译opencv并移植ARM端
Linux交叉编译opencv并移植ARM端 - 知乎
一、安装交叉编译器
目标平台为arm7l,此为32位ARM架构,要安装合适的编译器
sudo apt install arm-linux-gnueabihf-gcc
sudo apt install arm-linux-gnueabihf-g++
注意:64位ARM架构的编译器与32位ARM架构的编译器不能通用
二、opencv交叉编译
opencv的交叉编译工具链在../opencv3.2.0/platforms/linux 路径下,linux文件夹下是一些.cmake文件,对应不同的移植对象,我需要在rv1126上部署模型,所以选择platform/linux/arm-gnueabi.toolchain.cmake
你也可以对其作出修改(添加编译器所在位置):
set(GCC_COMPILER_VERSION "" CACHE STRING "GCC Compiler version")
set(GNU_MACHINE "arm-linux-gnueabi" CACHE STRING "GNU compiler triple")set(CMAKE_C_COMPILER /usr/bin/arm-linux-gnueabihf-gcc)
set(CMAKE_CXX_COMPILER /usr/bin/arm-linux-gnueabihf-g++)include("${CMAKE_CURRENT_LIST_DIR}/arm.toolchain.cmake")
接下来执行交叉编译命令
mkdir build && cd build
sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/mnt/usr/local -D OPENCV_EXTRA_MODULES_PATH=/opt/opencv/opencv_contrib/modules/ -D OPENCV_ENABLE_NONFREE=True -DCMAKE_TOOLCHAIN_FILE=/opt/opencv/platforms/linux/arm-gnueabi.toolchain.cmake ..sudo make -j8
sudo make install

编译结束后进入 build 文件夹,里面生成bin,include,lib,share四个文件夹
三、Linux上生成ARM架构下可执行文件
创建测试用例test.cpp,内容如下
#include <opencv2/opencv.hpp>using namespace cv; int main( int argc, char** argv )
{ Mat image; image = imread( "7.bmp", 1 ); if( !image.data ) { printf( "No image data \n" ); return -1; } cv::Point lu = cv::Point(180, 60); cv::Point rd = cv::Point(400, 260); cv::rectangle(image, lu, rd, cv::Scalar( 255, 20, 0 ), 1, cv::LINE_AA ); imwrite("8.bmp", image); return 0;
}CMakeList.txt
cmake_minimum_required(VERSION 2.8.4)project(draw_image)
include ($ENV{HOME}/configs/cross.cmake)find_package(OpenCV REQUIRED)
add_executable(${CMAKE_PROJECT_NAME} test.cpp)
target_include_directories(draw_image PUBLIC ${OpenCV_INCLUDE_DIRS})
target_link_libraries(draw_image PRIVATE ${OpenCV_LIBS})
~ 在终端执行:
mkdir build && cd buid
cmake ..
make在test.cpp同一目录下会生成可执行文件 draw_image,利用file draw_image检查可执行文件格式是否支持arm
draw_image: ELF 32-bit LSB shared object, ARM, EABI5 version 1 (SYSV), dynamically linked, interpreter /lib/ld-linux-armhf.so.3, BuildID[sha1]=6030f6191b409626a1f54c996cebb91aad644061, for GNU/Linux 3.2.0, not stripped出现如上结果说明可执行文件支持ARM7l
四、移植ARM端执行
将 build文件夹里面的include和lib里的文件分别拷贝到ARM板的/usr/include 和/usr/lib下 然后打开终端执行可执行文件即可。
build文件里include也许是空的,你可以在安装目录/include/找到opencv的头文件
draw_image可以执行

相关文章:
Linux交叉编译opencv并移植ARM端
Linux交叉编译opencv并移植ARM端 - 知乎 一、安装交叉编译器 目标平台为arm7l,此为32位ARM架构,要安装合适的编译器 sudo apt install arm-linux-gnueabihf-gcc sudo apt install arm-linux-gnueabihf-g注意:64位ARM架构的编译器与32位ARM架…...
简介与安装)
TypeScript教程(一)简介与安装
一、简介 TypeScript 是 JavaScript 的一个超集,扩展了JavaScript的语法,因此现有的JavaScript可与TypeScript一起工作无需修改,支持 ECMAScript 6 标准(ES6 教程)。 语言特性: 1.类型批注和编译时类型检…...

做视频_Style
Video 1> 风格2> 技巧3> 借鉴 🔗 B站视频 1> 风格 记录分享生活,工作,学习方面的总结; 4个段位: 实用 -> 简洁 -> 清晰流畅 -> 生动有趣 2> 技巧 1> 大视频分段录制,最后合并…...
vue3使用pinia和pinia-plugin-persist做持久化存储
插件和版本 1、安装依赖 npm i pinia // 安装 pinia npm i pinia-plugin-persist // 安装持久化存储插件2、main.js引入 import App from ./App.vue const app createApp(App)//pinia import { createPinia } from pinia import piniaPersist from pinia-plugin-persist //持…...

数据结构入门指南:二叉树
目录 文章目录 前言 1. 树的概念及结构 1.1 树的概念 1.2 树的基础概念 1.3 树的表示 1.4 树的应用 2. 二叉树 2.1 二叉树的概念 2.2 二叉树的遍历 前言 在计算机科学中,数据结构是解决问题的关键。而二叉树作为最基本、最常用的数据结构之一,不仅在算法…...

大数据课程J2——Scala的基础语法和函数
文章作者邮箱:yugongshiyesina.cn 地址:广东惠州 ▲ 本章节目的 ⚪ 掌握Scala的基础语法; ⚪ 掌握Scala的函数库; 一、Scala 基础语法一 1. 概述 语句 说明 示例 var 用来声明一个变量, 变量声明后…...
03-基础入门-搭建安全拓展
基础入门-搭建安全拓展 1、涉及的知识点2、常见的问题3、web权限的设置4、演示案例-环境搭建(1)PHPinfo(2)wordpress(3)win7虚拟机上使用iis搭建网站(4)Windows Server 2003配置WEB站…...
穿越未来:探索虚拟现实科技的未来前景
虚拟现实(Virtual Reality,简称VR)科技,正如一颗崭新的明星,迅猛崛起,为人类带来前所未有的体验和想象空间。随着科技的飞速发展,VR 科技的未来充满了无限的可能性,正将我们引向一个…...
SQL- 每日一题【1327. 列出指定时间段内所有的下单产品】
题目 表: Products 表: Orders 写一个解决方案,要求获取在 2020 年 2 月份下单的数量不少于 100 的产品的名字和数目。 返回结果表单的 顺序无要求 。 查询结果的格式如下。 示例 1: 解题思路 1.题目要求我们获取在 2020 年 2 月份下单的数量不少于 100 的产品的…...

[xgb] plot tree
xgboost plot tree debug problem1solutionsreference problem2solutionreference problem3solutionreference supplementary explanationplot_tree参数介绍num_treesmodel.get_booster().best_iteration图中信息介绍缺失值叶子的值 训练的XGB模型里有多少棵树 problem1 用xgb…...

【云原生】Kubernetes 概述
Kubernetes 概述 1.Kubernetes 简介 Kubernetes 是一个可移植的、可扩展的、用于管理容器化工作负载和服务的开源平台,它简化(促进)了声明式配置和自动化。它有一个庞大的、快速增长的生态系统。Kubernetes 的服务、支持和工具随处可见。 K…...

9.2.2Socket(TCP)
一.过程: 1.建立连接(不是握手),虽然内核中的连接有很多,但是在应用程序中,要一个一个处理. 2. 获取任务:使用ServerSocket.accept()方法,作用是把内核中的连接获取到应用程序中,这个过程类似于生产者消费者模型. 3. 使用缓冲的时候,注意全缓冲和行缓冲. 4.注意关闭文件资源…...
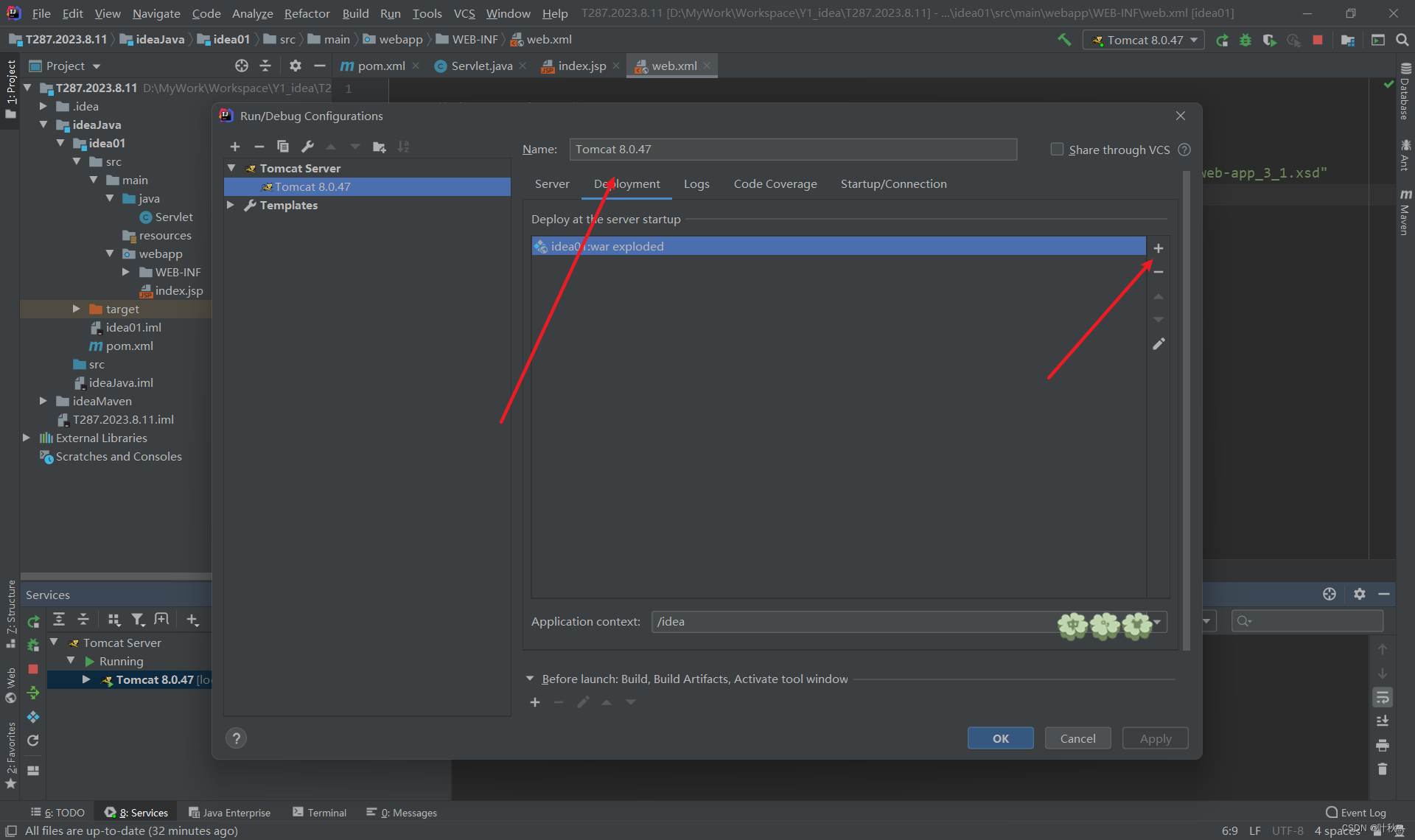
“解锁IDEA的潜力:高级Java Maven项目配置指南”
目录 前言:流程目录:1.确保Java和Maven已安装检查Java是否已正确安装并配置环境变量 2.创建一个新的Maven项目导航到要创建项目的目录配置Maven运行以下命令创建一个新的Maven项目 3.配置项目的pom.xml文件打开项目根目录下的pom.xml文件配置Web.xml 4.配…...
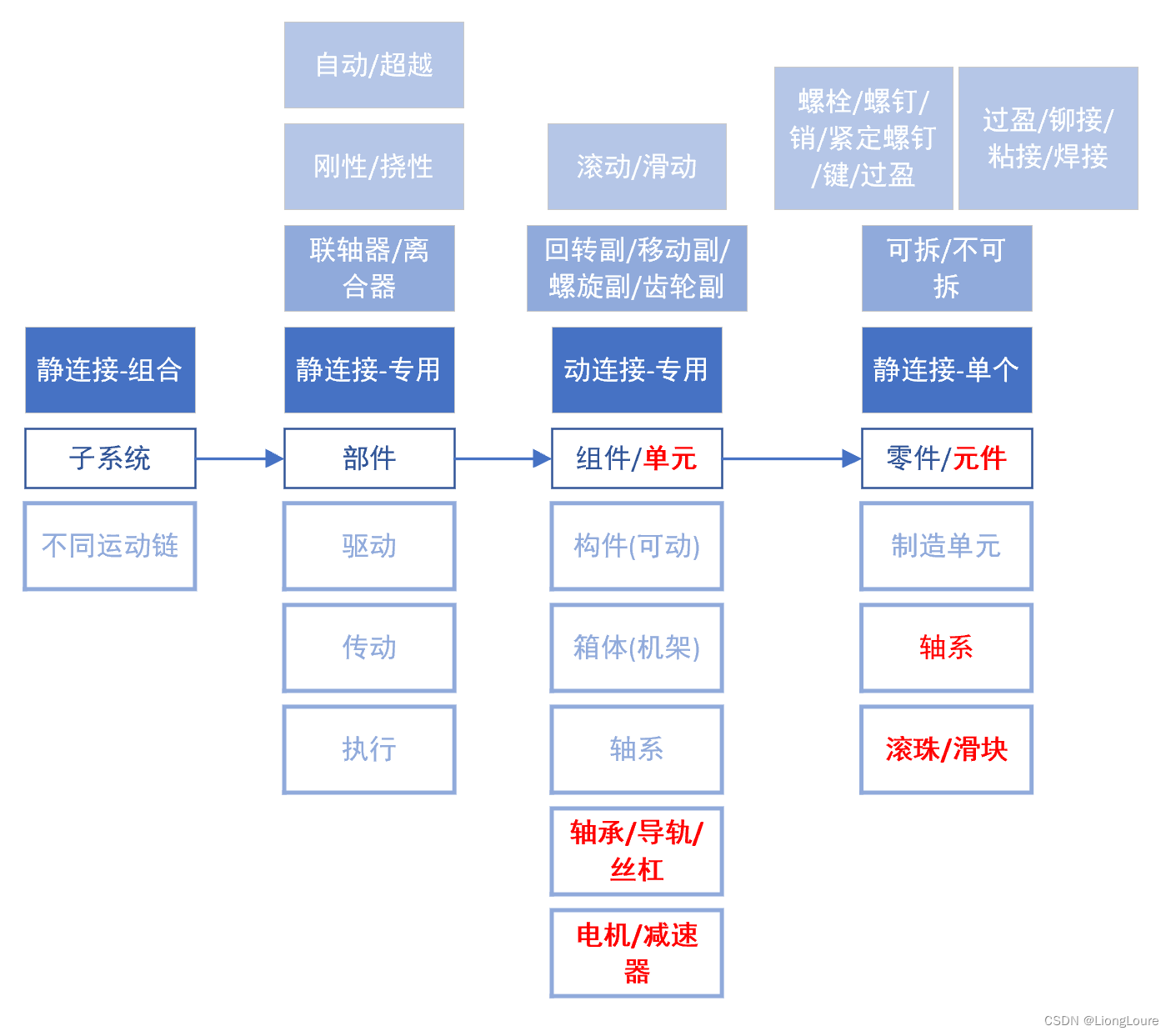
[足式机器人]Part5 机械设计 Ch00/01 绪论+机器结构组成与连接 ——【课程笔记】
本文仅供学习使用 本文参考: 《机械设计》 王德伦 马雅丽课件与日常作业可登录网址 http://edu.bell-lab.com/manage/#/login,选择观摩登录,查看2023机械设计2。 机械设计-Ch00Ch01——绪论机器结构组成与连接 Ch00-绪论0.1 何为机械设计——…...
)
机器学习:隐马尔可夫模型(HMM)
后续会回来补充代码 1 隐马尔可夫模型 隐马尔可夫模型(Hidden Markov Model,HMM)是可用于标注问题的统计学模型,描述由隐藏的马尔可夫链随机生成观测序列的过程。 1.1 数学定义 隐马尔可夫模型是关于时序的概率模型,描述由一个隐藏的马尔可夫链随机生成…...
使用插件实现pdf,word预览功能
效果 代码: 插件地址: https://github.com/501351981/vue-office <a-modalv-model:visible"visible":title"title"ok"handleOk":bodyStyle"bodyStyle":width"1200":maskClosable"false"…...
)
yolov5模型构建源码详细解读(yaml、parse_model等内容)
文章目录 前言一、yolov5文件说明二、yolov5调用模型构建位置三、模型yaml文件解析1、 yaml的backbone解读Conv模块参数解读C3模块参数解读 2、yaml的head解读Concat模块参数解读Detect模块参数解读 四、模型构建整体解读五、构建模型parse_model源码解读 前言 本文章记录yolo…...

Monodepth2和Lite-Mono准备数据集
以KITTI为例下载解压后放在/home/lwd/tmp/2011_09_26 cd /home/lwd/tmp/2011_09_26 ls输出 2011_09_26_drive_0001_sync 2011_09_26_drive_0002_sync 2011_09_26_drive_0005_sync python txt.py txt.py import os, sysalos.listdir(.) al.sort() fopen(train.txt, w) for a in…...

ML-fairness-gym入门教学
1、ML-fairness-gym简介 ML-fairness-gym是一个探索机器学习系统长期影响的工具。可以用于评估机器学习系统的公平性和评估静态数据集上针对各种输入的误差度量的差异。开源网站:GitHub - google/ml-fairness-gym 2、安装ML-fairness-gym(Windows&…...

结构体指针变量的使用
1、结构体指针的引用 #include<iostream> using namespace std;struct Student {int num;char name[32]; }; int main() {struct Student stu {1,"张三"};struct Student* p &stu;system("pause"); return 0; } 2、通过结构体指针访问结构体…...

基于Windows Defender遥测数据与机器学习预测恶意软件感染风险
1. 项目概述:当Windows Defender遇见机器学习在网络安全这个没有硝烟的战场上,恶意软件(Malware)始终是悬在个人用户和企业头顶的达摩克利斯之剑。从勒索软件加密关键文件,到间谍软件窃取商业机密,每一次成…...

紧急更新|Midjourney即将下线--blueprint实验性指令!最后48小时掌握蓝晒法风格不可逆生成逻辑
更多请点击: https://intelliparadigm.com 第一章:Midjourney蓝晒法风格的底层视觉基因解码 蓝晒法(Cyanotype)作为19世纪诞生的古典摄影工艺,其视觉基因并非仅由普鲁士蓝染料决定,而是一套由化学反应、物…...

纤维增强复合材料神经协同优化技术解析
1. 纤维增强复合材料协同优化技术概述纤维增强复合材料因其优异的比强度和比刚度特性,在航空航天、汽车制造等领域得到广泛应用。传统设计方法通常将结构拓扑优化与制造工艺规划分离处理,导致优化结果难以实际制造或性能大幅下降。我们提出的神经协同优化…...

基于LSTM的无人艇波浪方向估计:从时序预测到工程实践
1. 项目概述:当无人艇“学会”感知海浪在海洋工程和无人系统领域,让机器“感知”并“理解”它所处的海洋环境,尤其是波浪的动态特性,一直是个核心挑战。想象一下,你驾驶一艘小船,如果能提前几秒甚至更久“预…...

Godot开发RTS游戏的实战优化指南
1. 为什么说“用Godot做RTS”不是噱头,而是被低估的务实选择很多人第一次听说“用Godot开发即时战略游戏”,第一反应是皱眉——毕竟Unity和Unreal在大型3D项目上的生态优势太显眼,而传统RTS又以单位数量多、逻辑密集、网络同步严苛著称。我20…...

嵌入式工程师核心素养:从测试到系统构建的全链路能力模型
1. 从“明星评选”看嵌入式工程师的成长路径与价值塑造最近看到一篇关于某公司内部“品质与服务创建活动”的报道,评选了四位明星工程师。这让我感触颇深。在嵌入式这个行当里摸爬滚打了十几年,我见过太多技术扎实但默默无闻的同行,也见过一些…...

Magma高可用部署:如何构建企业级可靠网络基础设施
Magma高可用部署:如何构建企业级可靠网络基础设施 【免费下载链接】magma Platform for building access networks and modular network services 项目地址: https://gitcode.com/gh_mirrors/mag/magma Magma是构建接入网络和模块化网络服务的强大平台&#…...

fltk-rs常见问题解决方案:从编译错误到运行时问题的全面排查
fltk-rs常见问题解决方案:从编译错误到运行时问题的全面排查 【免费下载链接】fltk-rs Rust bindings for the FLTK GUI library. 项目地址: https://gitcode.com/gh_mirrors/fl/fltk-rs fltk-rs是Rust语言的FLTK GUI库绑定,为开发者提供了轻量级…...

洛雪音乐六音音源修复完整指南:快速恢复音乐播放功能
洛雪音乐六音音源修复完整指南:快速恢复音乐播放功能 【免费下载链接】New_lxmusic_source 六音音源修复版 项目地址: https://gitcode.com/gh_mirrors/ne/New_lxmusic_source 洛雪音乐是一款广受欢迎的开源音乐播放器,但近期许多用户遇到了六音音…...
)
【MATLAB】人脸表情识别与情感分析程序(工程实操版)
【MATLAB】人脸表情识别与情感分析程序(工程实操版) 摘要:人脸表情是人类情感表达的核心载体,人脸表情识别与情感分析技术融合了计算机视觉、图像处理、模式识别等多领域知识,广泛应用于人机交互、心理评估、智能安防、教育教学等场景。传统表情识别依赖人工判断,存在主…...