迷宫问题图解 : 基于骨架提取、四邻域
目录
1. 迷宫的连通域
2. How to remove branch ?
3. 基于4邻域的 remove 分支
3.1 找到分支的端点
3.2 4邻域的 remove 分支
3.3 循环移除分支
3.4 code
4. 迷宫路线
4.1 预处理
4.2 提取骨架
4.3 分支的端点
4.4 去除分支的端点
4.5 循环去除分支
4.6 迭代过程展示
4.7 结果展示
4.8 代码
5. show
6. Acknowledge
1. 迷宫的连通域
之前对迷宫求解的问题感兴趣,看了很多求解的算法,大部分都是深度搜索啥的。
由于本人对算法不是很敏感,因此想看看能不能将自己所学的和迷宫问题联系起来。从俯视的角度来看,迷宫就是一直2d图片,既然是图像,就可以尝试使用数字图像处理的方法来解决。
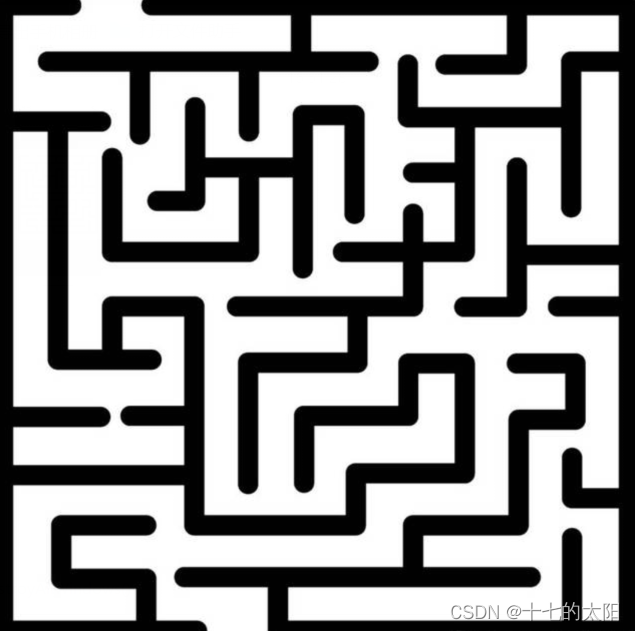
例如一副迷宫图像,黑色的是围墙,白色的是道路。
迷宫求解其实就是在白色的像素域中找到一条可以连接出入口的连通域
连通域很好找,这里不再介绍,opencv里面也有专门的函数找连通域。
但是问题就是,往往这种连通域里面,有很多的分支,会将迷宫路线走向死路。所以现在求解迷宫问题的思路就是,如何将分支去除?
2. How to remove branch ?
一开始的时候,这个地方卡了很久。
后来想到了下面这种邻域移除的方法,不能保证完全正确,但能处理自己预期的迷宫问题...
OK,here we go ....
当时想了很久,其实我当时一直陷入了一个误区。
例如,从A点走到B点,显然红线是唯一的路径,两条黑线就是死路。所以问题是在这一条连通域当中,怎么去除黑线,只保留红线。

当时想了很多,例如距离变换中草原大火的概念从端点开始''点火'',或者计算连通域当中像素点的个数只保留最大的那条连通域等等。问题是,这条红色的线是人为标记出来的能通的路线,对计算机来看,黑色和红色的线没有任何差异,所以之前的想法压根不起作用。
在误区里面卡了很久,后来在一副图里面突然有了灵感,类似下面这种的闪电图。

从这幅图来看,其实天空就是迷宫的起点,大地就是迷宫的出口。闪电划过,有一道连接了天空和大地,就是迷宫的解,其余的分支就是迷宫中对应的死路。
这样看这副闪电图片,很容易联想到树枝,主干长成后,分支慢慢向四周长开。
类似这个闪电图,假设图中最粗的主干(迷宫解的路线)是最先形成的,其余的细小的分支是慢慢从主干上形成的。那么去除这些分支,不就是从分支的端点,慢慢向主干靠拢的过程吗(相当于分支形成的逆过程)
简单来说,就是找到所以分支的端点,然后顺着分支慢慢往回走,直到走到主干上,这条分支就被消除了。
3. 基于4邻域的 remove 分支
一般来说,迷宫都是上下左右的道路,这里不考虑那些斜着走的迷宫。
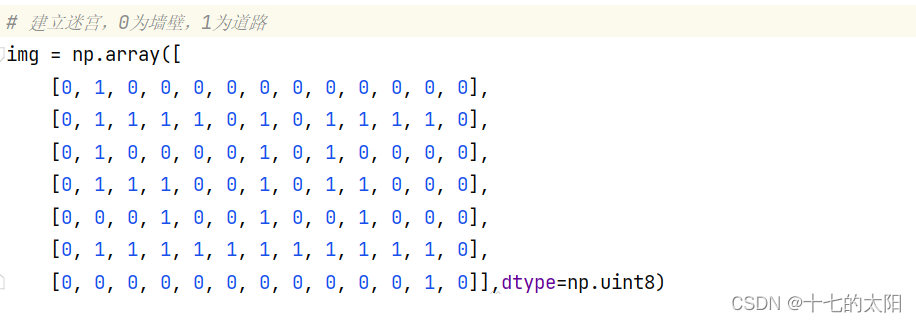
这里用数组建立一个小型的迷宫,为下面展示用
3.1 找到分支的端点
这里先来介绍如何找到分支的端点
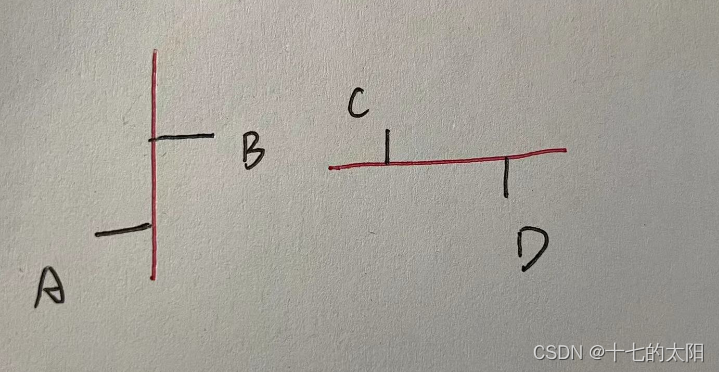
因为迷宫都是上下左右的路线,那么对于分支来说,端点只有四种情况。
红色代表主干,黑色是分支端点的四种情况A、B、C、D
- A就是分支是从右往左走的端点
- B就是分支是从左往右走的端点
- C就是分支是从下往上走的端点
- D就是分支是从上往下走的端点
因为端点只有这四种情况,那么找到端点只需要找到匹配的模板就行了。因此, 找端点这里利用 形态学 - 击中-击不中变换 特性
击中-击不中 变换大概的意思就是,和 kernel 一样的图像区域会被显示,不一样的显示为背景。
击中-击不中的kernel中:1代表前景,0代表不感兴趣的点、-1代表背景点
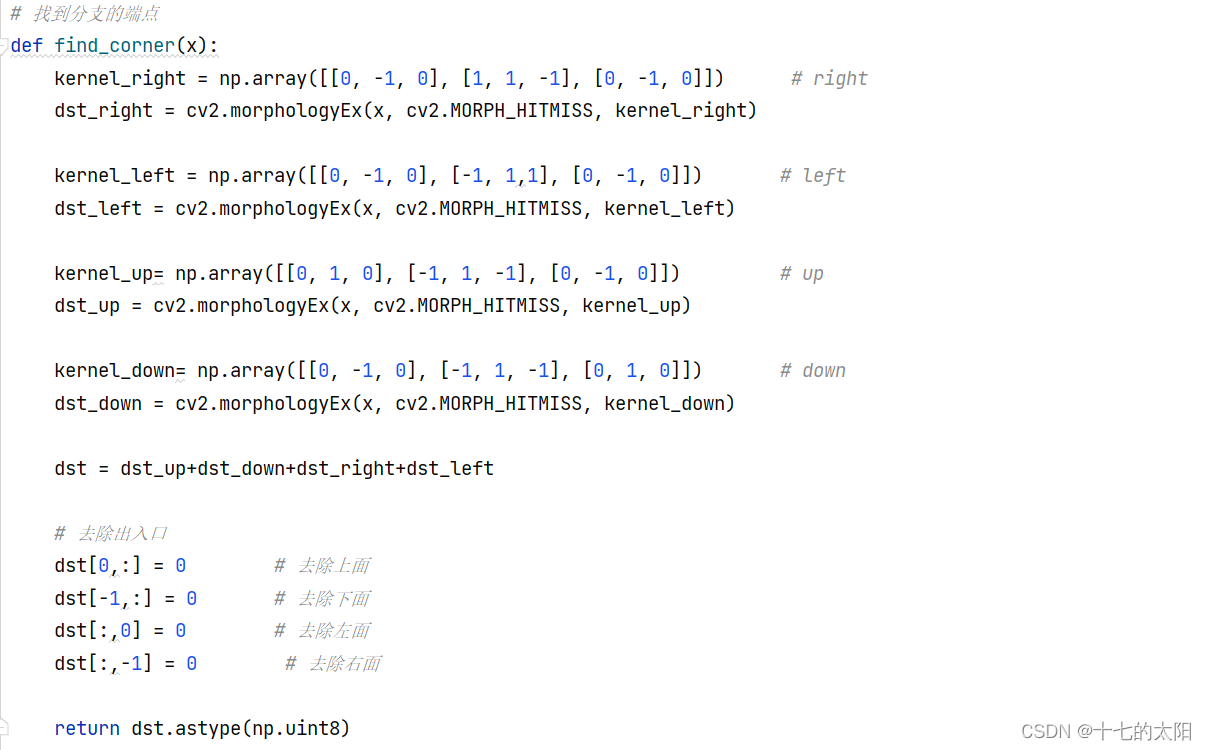
这里代码很简单,不做解释。就是将四周分支端点的情况放在 3 * 3 的模板里面,和原图去匹配即可。
但是分支要注意一点,因为出入口其实也是一个端点,只不过是主干的端点。所以这里要去除这两个点,这里假设出入口就在图片的四周上
注意:出入口必须在整幅图像的四周。
利用击中击不中特性,找到的端点为:
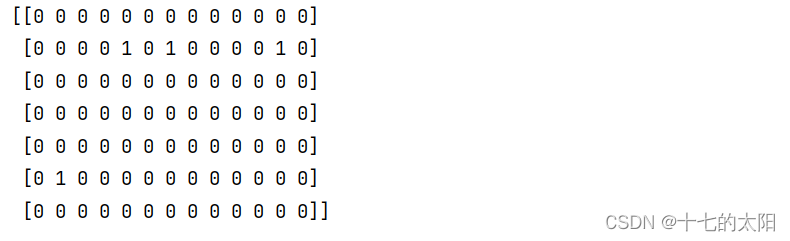
3.2 4邻域的 remove 分支
现在来看看怎么移除这些分支
因为这里考虑的迷宫路线都是上下左右的线路
因此,只要在端点的4邻域中,找到可以走的道路,那么一定就是分支,也就是要移除的路线。
那么问题来了,怎么知道分支已经结束了呢,或者说,怎么判断分支走到了主干上?
很简单,因为分支一定是从主干的的中间分出来的。也就是说,分支连接在主干的端点,肯定有两条路可以走,一个通到出口,一个通到入口。对应于数字图像的表达,就是从远离主干的分支端点出发,如果4邻域中只有一个可以通的道路,那么这个点在分支上。如果这个点4邻域有两个或者以上的点,那么这个点在主干上。
代码如下:
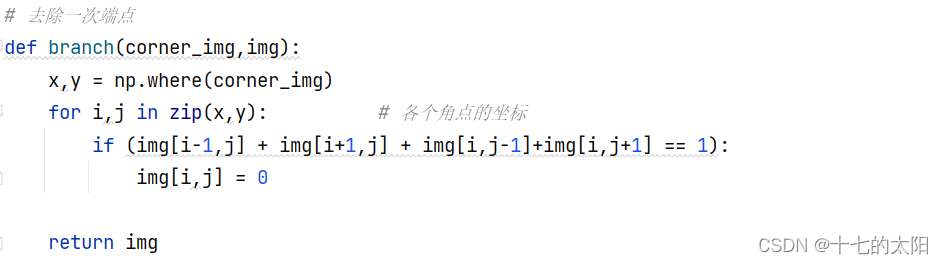
这里要传入两张图片,一个是find_corner返回的端点图,一个是原图。
因为这里迷宫的可以走的路线设置为1,因此如果4邻域上的只有一个可以走的路,那么4邻域加起来等于1

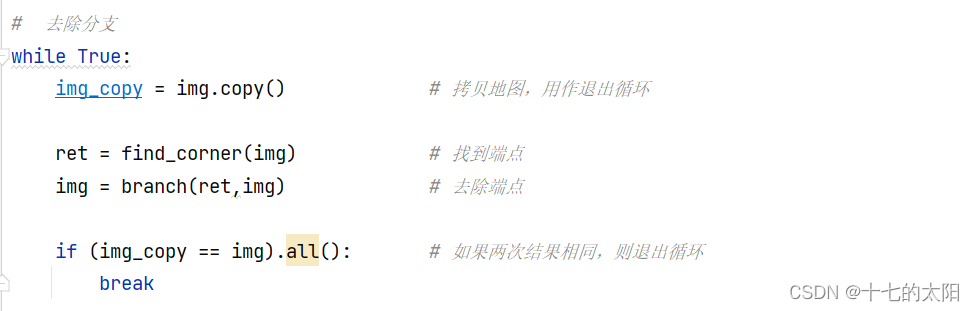
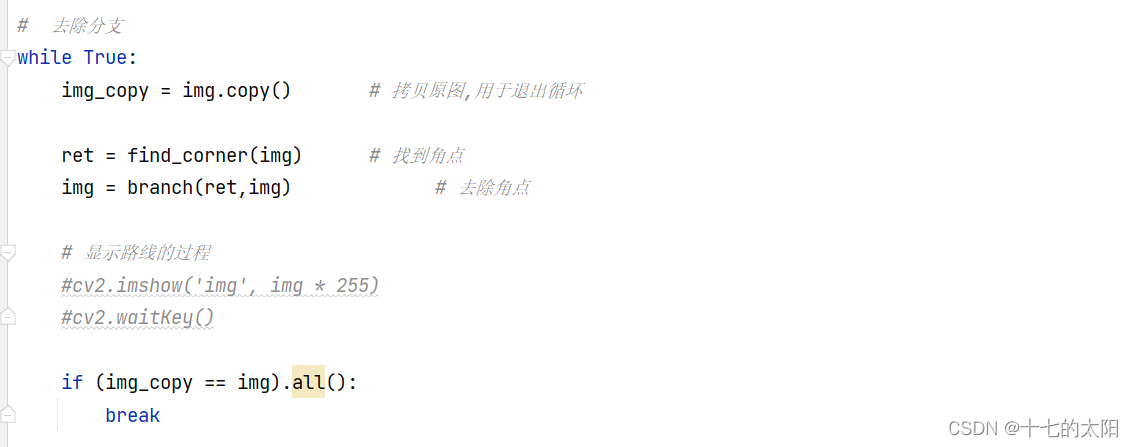
3.3 循环移除分支
这里设置的是一次移除所有分支的端点,想要移除分支,只需要重复这个过程即可
- 找到所有分支的端点
- 移除这些端点
- 找到新的端点
- 移除新的端点...
- 重复这个过程
循环处理的代码为:
最后处理的结果为:

3.4 code
import numpy as np
import cv2# 建立迷宫,0为墙壁,1为道路
img = np.array([[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],[0, 1, 1, 1, 1, 0, 1, 0, 1, 1, 1, 1, 0],[0, 1, 0, 0, 0, 0, 1, 0, 1, 0, 0, 0, 0],[0, 1, 1, 1, 0, 0, 1, 0, 1, 1, 0, 0, 0],[0, 0, 0, 1, 0, 0, 1, 0, 0, 1, 0, 0, 0],[0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0],[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0]],dtype=np.uint8)# 拷贝地图
source = img.copy()# 找到分支的端点
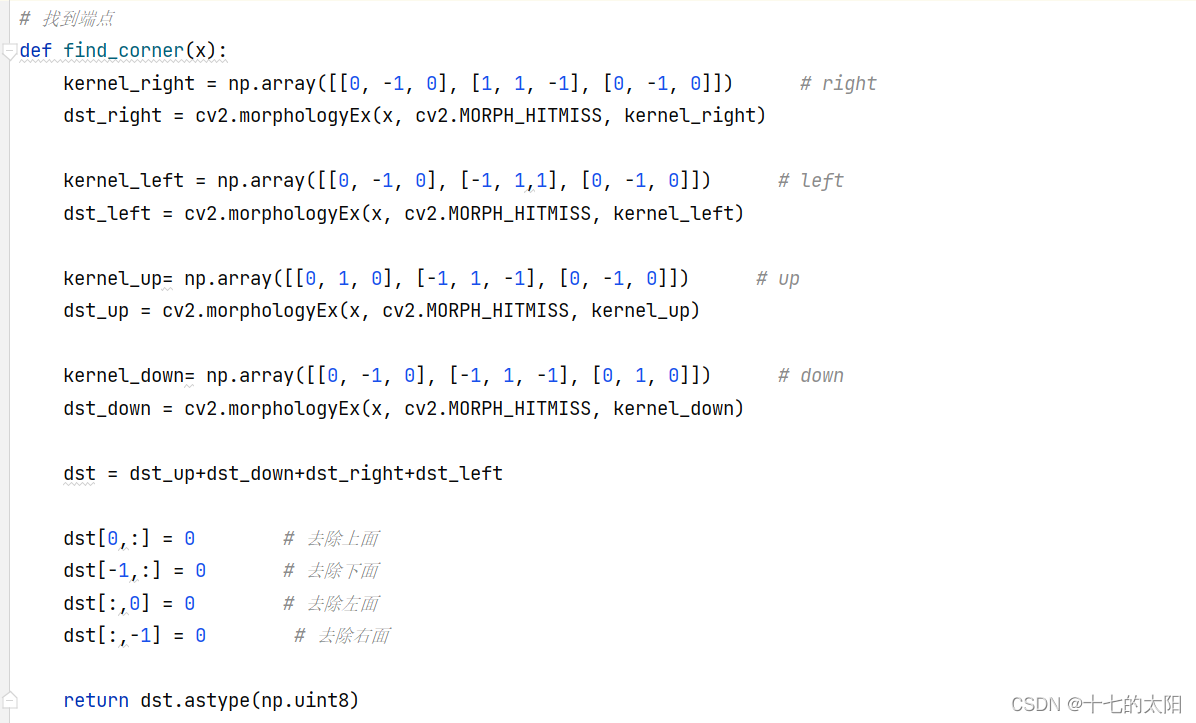
def find_corner(x):kernel_right = np.array([[0, -1, 0], [1, 1, -1], [0, -1, 0]]) # rightdst_right = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_right)kernel_left = np.array([[0, -1, 0], [-1, 1,1], [0, -1, 0]]) # leftdst_left = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_left)kernel_up= np.array([[0, 1, 0], [-1, 1, -1], [0, -1, 0]]) # updst_up = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_up)kernel_down= np.array([[0, -1, 0], [-1, 1, -1], [0, 1, 0]]) # downdst_down = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_down)dst = dst_up+dst_down+dst_right+dst_left# 去除出入口dst[0,:] = 0 # 去除上面dst[-1,:] = 0 # 去除下面dst[:,0] = 0 # 去除左面dst[:,-1] = 0 # 去除右面return dst.astype(np.uint8)# 去除一次端点
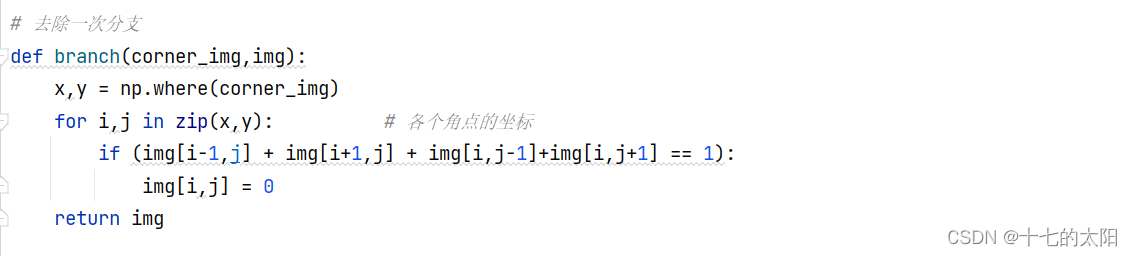
def branch(corner_img,img):x,y = np.where(corner_img)for i,j in zip(x,y): # 各个角点的坐标if (img[i-1,j] + img[i+1,j] + img[i,j-1]+img[i,j+1] == 1):img[i,j] = 0return img# 去除分支
while True:img_copy = img.copy() # 拷贝地图,用作退出循环ret = find_corner(img) # 找到端点img = branch(ret,img) # 去除端点if (img_copy == img).all(): # 如果两次结果相同,则退出循环breakprint(source)
print(img)
4. 迷宫路线
将代码修改,即可绘制出图像的迷宫路线
4.1 预处理
首先,将图像进行预处理
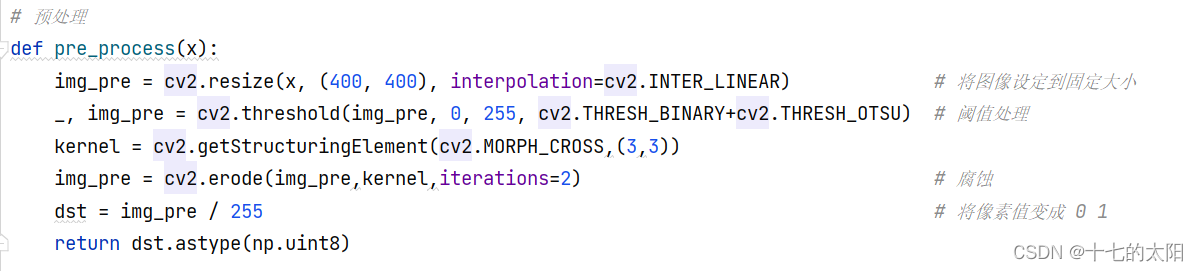
- 首先将图像进行缩放
- 阈值处理,将图像变成二值图像
- 腐蚀可以增大背景图像,缩小前景像素点。为下面的细化减少运算量,也可以突出迷宫的最外层墙壁
- 最后将像素点变成0 1 二值图像。因为四邻域中,设置的是4邻域加起来等于 1
4.2 提取骨架
提取迷宫道路的骨架可以方便更好的找出路线
具体的参考:形态学 - 细化
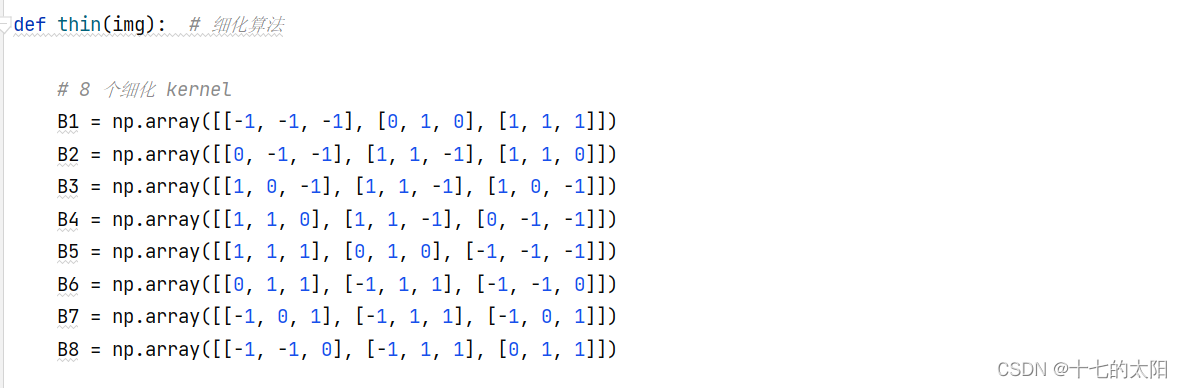
细化算法需要的kernel
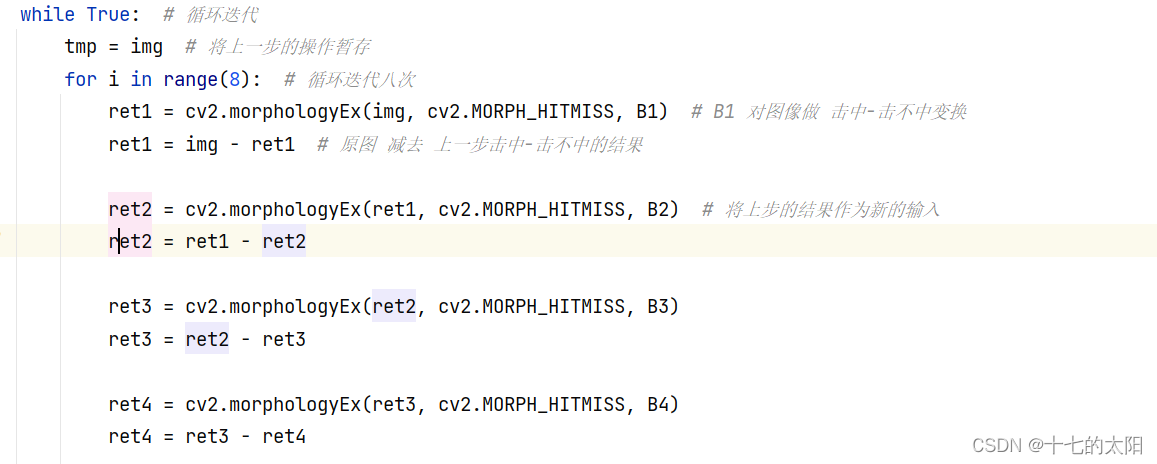
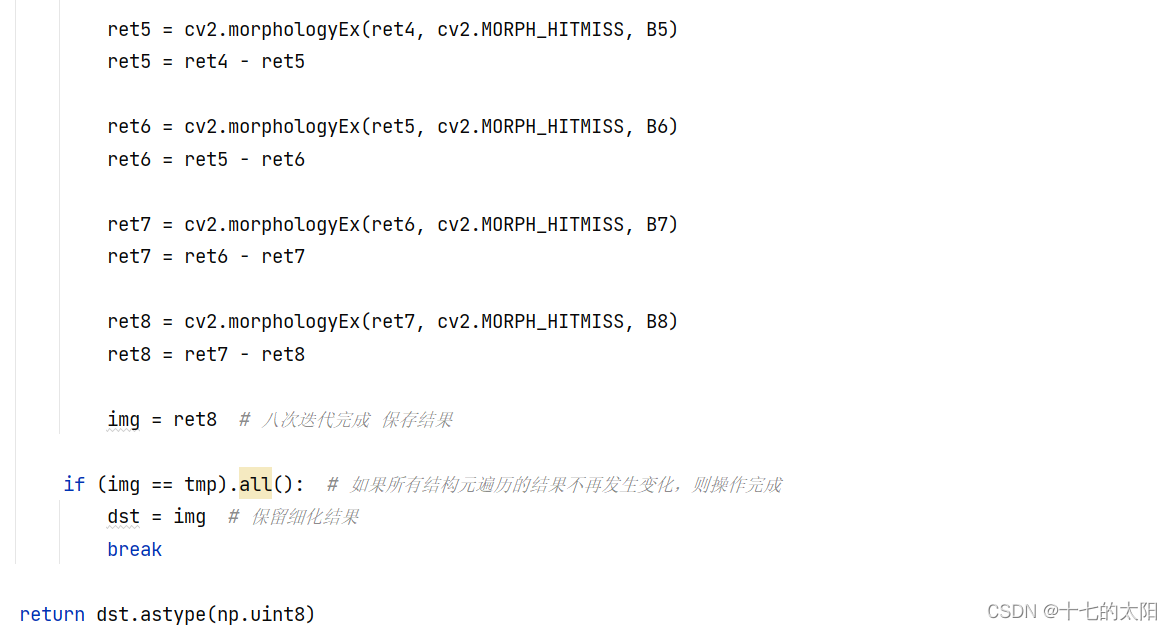
循环做击中击不中变换,找到骨架
4.3 分支的端点
和之前的一样
4.4 去除分支的端点
4.5 循环去除分支
4.6 迭代过程展示

4.7 结果展示
4.8 代码
完整代码:
import numpy as np
import cv2# 预处理
def pre_process(x):img_pre = cv2.resize(x, (400, 400), interpolation=cv2.INTER_LINEAR) # 将图像设定到固定大小_, img_pre = cv2.threshold(img_pre, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) # 阈值处理kernel = cv2.getStructuringElement(cv2.MORPH_CROSS,(3,3))img_pre = cv2.erode(img_pre,kernel,iterations=2) # 腐蚀dst = img_pre / 255 # 将像素值变成 0 1return dst.astype(np.uint8)# 提取骨架
def thin(img): # 细化算法# 8 个细化 kernelB1 = np.array([[-1, -1, -1], [0, 1, 0], [1, 1, 1]])B2 = np.array([[0, -1, -1], [1, 1, -1], [1, 1, 0]])B3 = np.array([[1, 0, -1], [1, 1, -1], [1, 0, -1]])B4 = np.array([[1, 1, 0], [1, 1, -1], [0, -1, -1]])B5 = np.array([[1, 1, 1], [0, 1, 0], [-1, -1, -1]])B6 = np.array([[0, 1, 1], [-1, 1, 1], [-1, -1, 0]])B7 = np.array([[-1, 0, 1], [-1, 1, 1], [-1, 0, 1]])B8 = np.array([[-1, -1, 0], [-1, 1, 1], [0, 1, 1]])while True: # 循环迭代tmp = img # 将上一步的操作暂存for i in range(8): # 循环迭代八次ret1 = cv2.morphologyEx(img, cv2.MORPH_HITMISS, B1) # B1 对图像做 击中-击不中变换ret1 = img - ret1 # 原图 减去 上一步击中-击不中的结果ret2 = cv2.morphologyEx(ret1, cv2.MORPH_HITMISS, B2) # 将上步的结果作为新的输入ret2 = ret1 - ret2ret3 = cv2.morphologyEx(ret2, cv2.MORPH_HITMISS, B3)ret3 = ret2 - ret3ret4 = cv2.morphologyEx(ret3, cv2.MORPH_HITMISS, B4)ret4 = ret3 - ret4ret5 = cv2.morphologyEx(ret4, cv2.MORPH_HITMISS, B5)ret5 = ret4 - ret5ret6 = cv2.morphologyEx(ret5, cv2.MORPH_HITMISS, B6)ret6 = ret5 - ret6ret7 = cv2.morphologyEx(ret6, cv2.MORPH_HITMISS, B7)ret7 = ret6 - ret7ret8 = cv2.morphologyEx(ret7, cv2.MORPH_HITMISS, B8)ret8 = ret7 - ret8img = ret8 # 八次迭代完成 保存结果if (img == tmp).all(): # 如果所有结构元遍历的结果不再发生变化,则操作完成dst = img # 保留细化结果breakreturn dst.astype(np.uint8)# 找到端点
def find_corner(x):kernel_right = np.array([[0, -1, 0], [1, 1, -1], [0, -1, 0]]) # rightdst_right = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_right)kernel_left = np.array([[0, -1, 0], [-1, 1,1], [0, -1, 0]]) # leftdst_left = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_left)kernel_up= np.array([[0, 1, 0], [-1, 1, -1], [0, -1, 0]]) # updst_up = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_up)kernel_down= np.array([[0, -1, 0], [-1, 1, -1], [0, 1, 0]]) # downdst_down = cv2.morphologyEx(x, cv2.MORPH_HITMISS, kernel_down)dst = dst_up+dst_down+dst_right+dst_leftdst[0,:] = 0 # 去除上面dst[-1,:] = 0 # 去除下面dst[:,0] = 0 # 去除左面dst[:,-1] = 0 # 去除右面return dst.astype(np.uint8)# 去除一次分支
def branch(corner_img,img):x,y = np.where(corner_img)for i,j in zip(x,y): # 各个角点的坐标if (img[i-1,j] + img[i+1,j] + img[i,j-1]+img[i,j+1] == 1):img[i,j] = 0return imgimg = cv2.imread('c.png',0) # 读取图像
img = pre_process(img) # 预处理之后的图像
source = img.copy() # 拷贝图像
img = thin(img)# 去除分支
while True:img_copy = img.copy() # 拷贝原图,用于退出循环ret = find_corner(img) # 找到角点img = branch(ret,img) # 去除角点# 显示路线的过程#cv2.imshow('img', img * 255)#cv2.waitKey()if (img_copy == img).all():breaksource *= 255
dst = source + img *120
cv2.imshow('img',np.hstack((source,dst)))
cv2.waitKey()
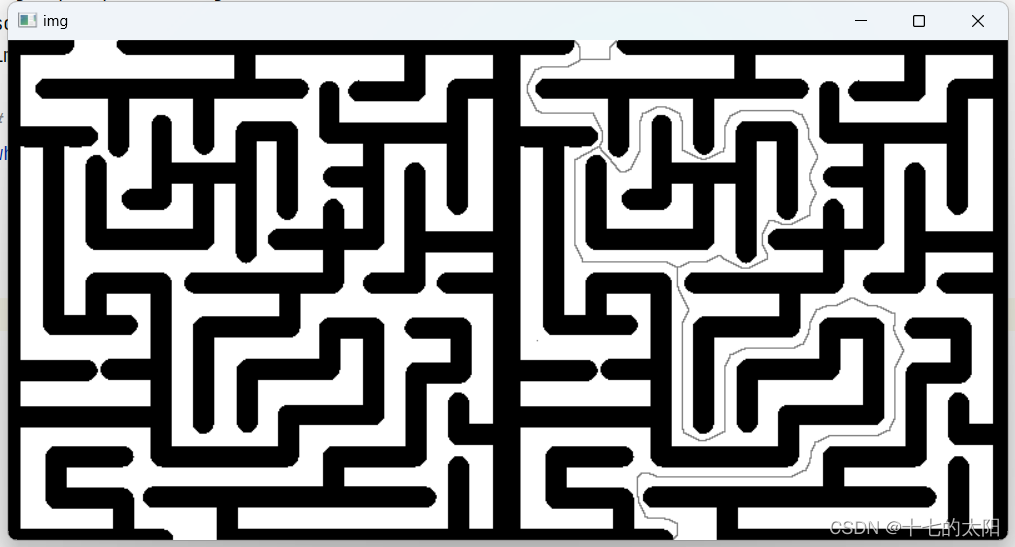
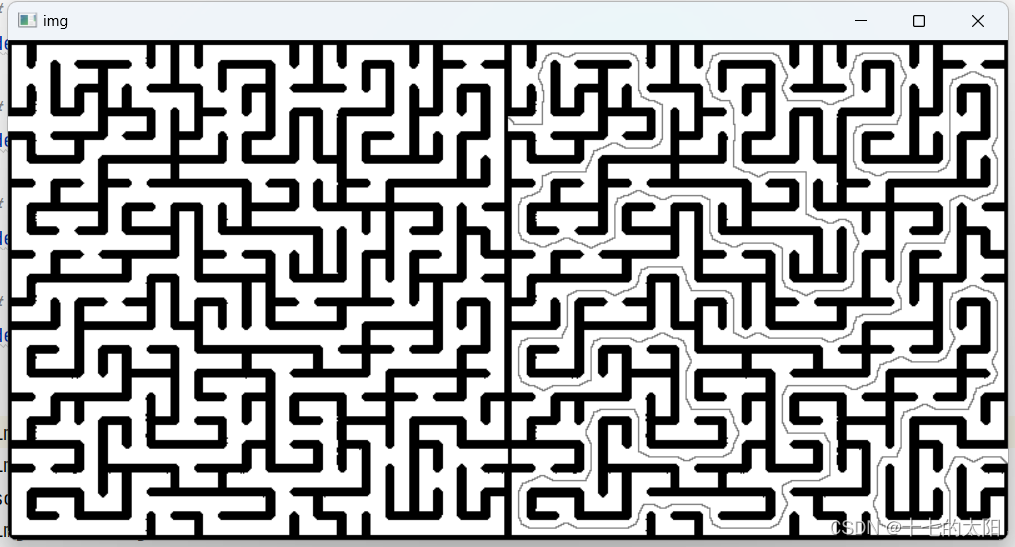
cv2.destroyAllWindows()5. show
这里是网上找到迷宫,和利用代码找到的迷宫解法

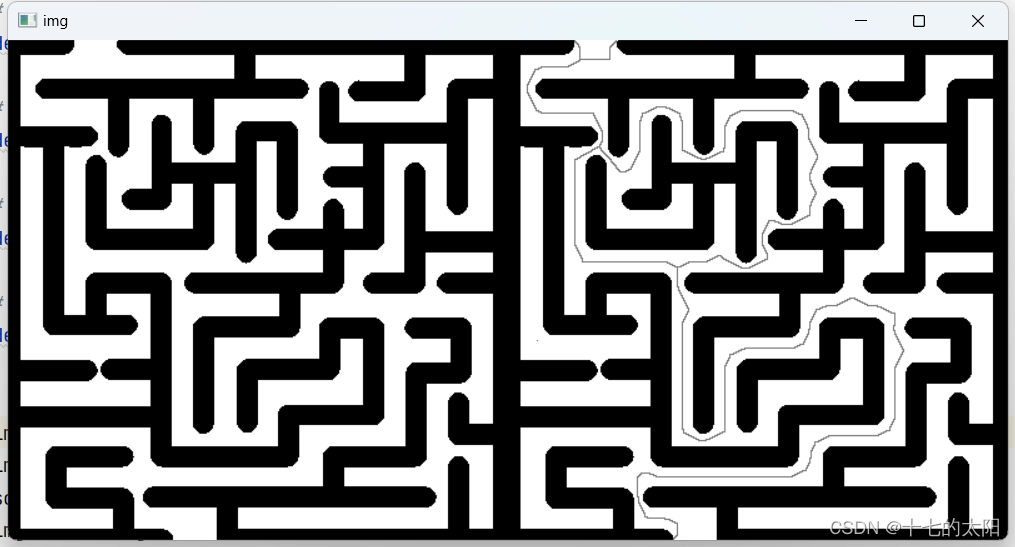
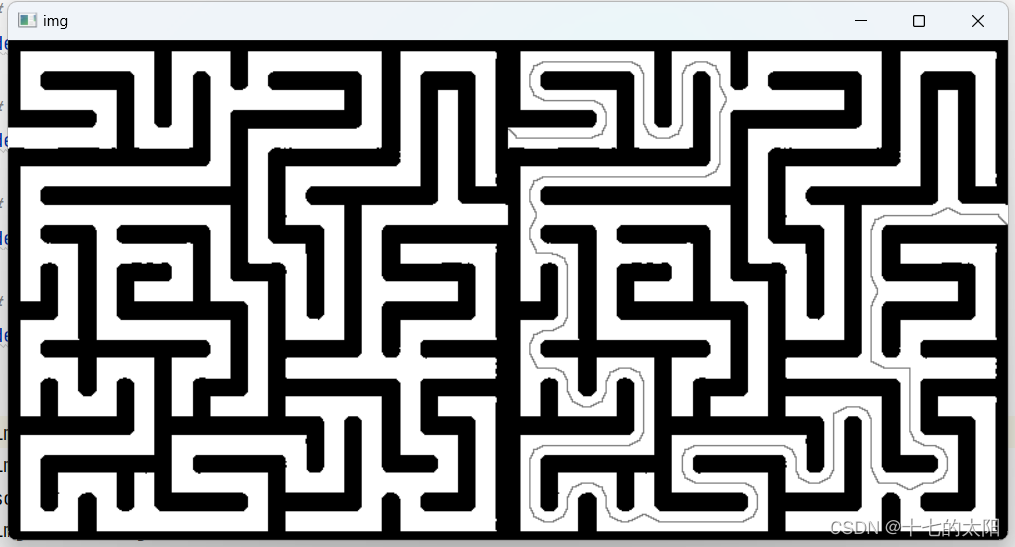

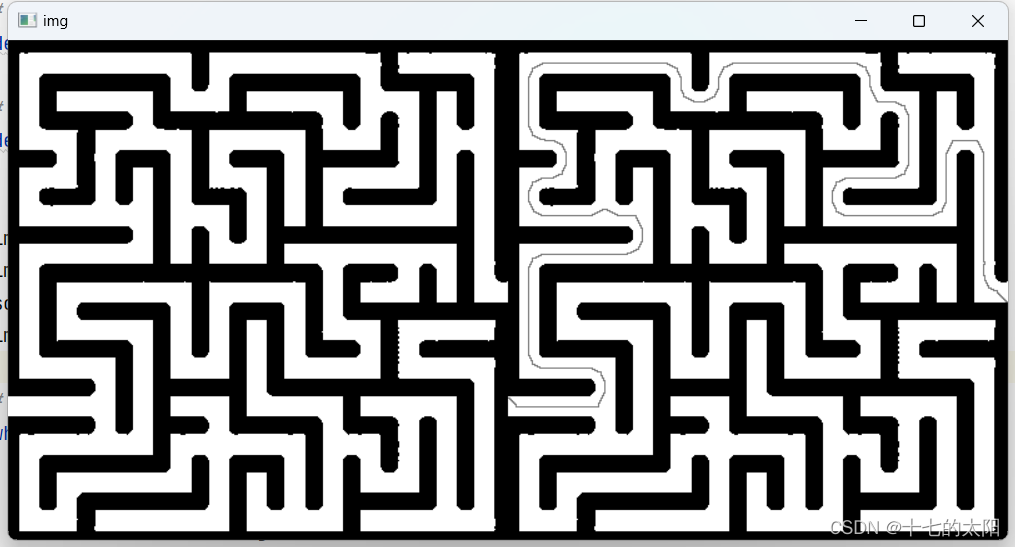
6. Acknowledge
存在的问题:
- 输入的迷宫图片必须按照指定的格式。例如,图片的四周必须是墙壁且出入口在四周
- 迷宫需要保证黑色为墙壁,白色为道路。迷宫的走法是上下左右,没有斜着走的
Tips:
- 骨架抽取选择细化是因为,其余的方法可能会产生不连续的骨架,导致迷宫求解失败
相关文章:
迷宫问题图解 : 基于骨架提取、四邻域
目录 1. 迷宫的连通域 2. How to remove branch ? 3. 基于4邻域的 remove 分支 3.1 找到分支的端点 3.2 4邻域的 remove 分支 3.3 循环移除分支 3.4 code 4. 迷宫路线 4.1 预处理 4.2 提取骨架 4.3 分支的端点 4.4 去除分支的端点 4.5 循环去除分支 4…...

设计模式 - 如何在库和主程序之间互相调用数据和函数
背景:在项目开发过程中,难免碰到这种情况,当我们想要通过我们开发的库,调用主程序中的一些变量或者函数的时候,就会导致一些问题,因为在项目构建过程中,库都是不依赖于主程序编译的,…...
Redis面试题:1~2亿条数据需要缓存,请问如何设计这个存储案例
目录 前言 一、哈希取余分区 优点 缺点 二、一致性哈希算法分区 背景 步骤 ① 算法构建一致性哈希环 ② 服务器IP节点映射 ③ key落到服务器的落键规则 优点 ① 容错性 ② 扩展性 缺点 三、哈希槽分区 前言 单机单台100%不可能,肯定是分布式存储&am…...

程序员必备的软技能-《如何阅读一本书》
阅读很重要,我们真的会阅读吗? 这本书的初版是 1940年,时隔 80年,其内容仍然不过时。第一次读这本书时,给我最大的影响就是主题阅读,每次学习一个新理论、技术,都入手多本关于这项理论、技术的书…...
Java数据结构-栈、队列常用类(Stack、ArrayDeque、LinkedLList)
数据结构的三要素包括:逻辑结构、存储结构、数据的运算。逻辑结构描述的是数据之间的逻辑关系,分为线性结构(线性表(数组、链表)、栈、队列)和非线性结构(图、树、集合)。物理结构也…...
拯救了大批爬虫程序员,因为一个简单的神器
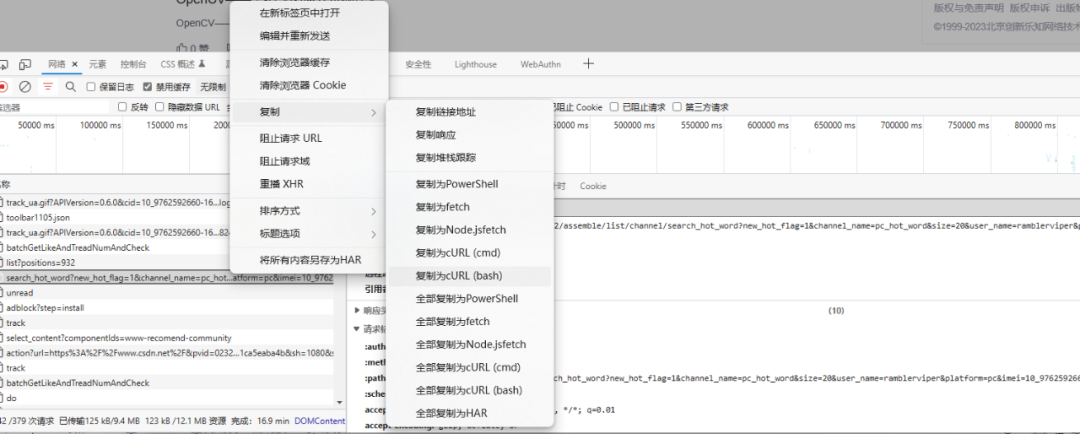
相信大家应该都写过爬虫,简单的爬虫只需要使用 requests 即可。遇到复杂的爬虫,就需要在程序里面加上请求头和参数信息。类似这种:我们一般的步骤是,先到浏览器的网络请求中找到我们需要的请求,然后将请求头和参数信息…...
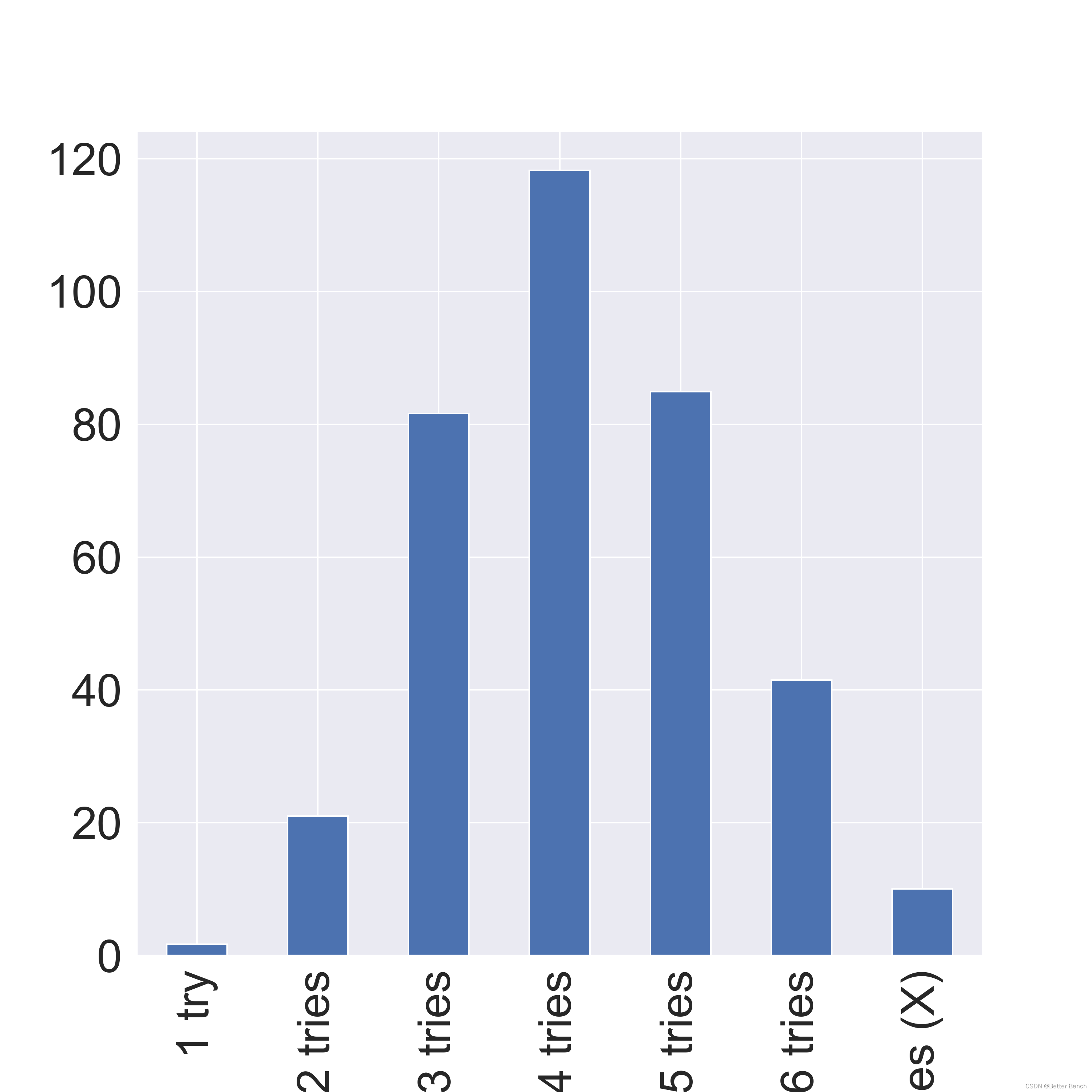
2023年美赛C题Wordle预测问题三、四建模及Python代码详细讲解
更新时间:2023-2-19 16:30 相关链接 (1)2023年美赛C题Wordle预测问题一建模及Python代码详细讲解 (2)2023年美赛C题Wordle预测问题二建模及Python代码详细讲解 (3)2023年美赛C题Wordle预测问题三、四建模…...
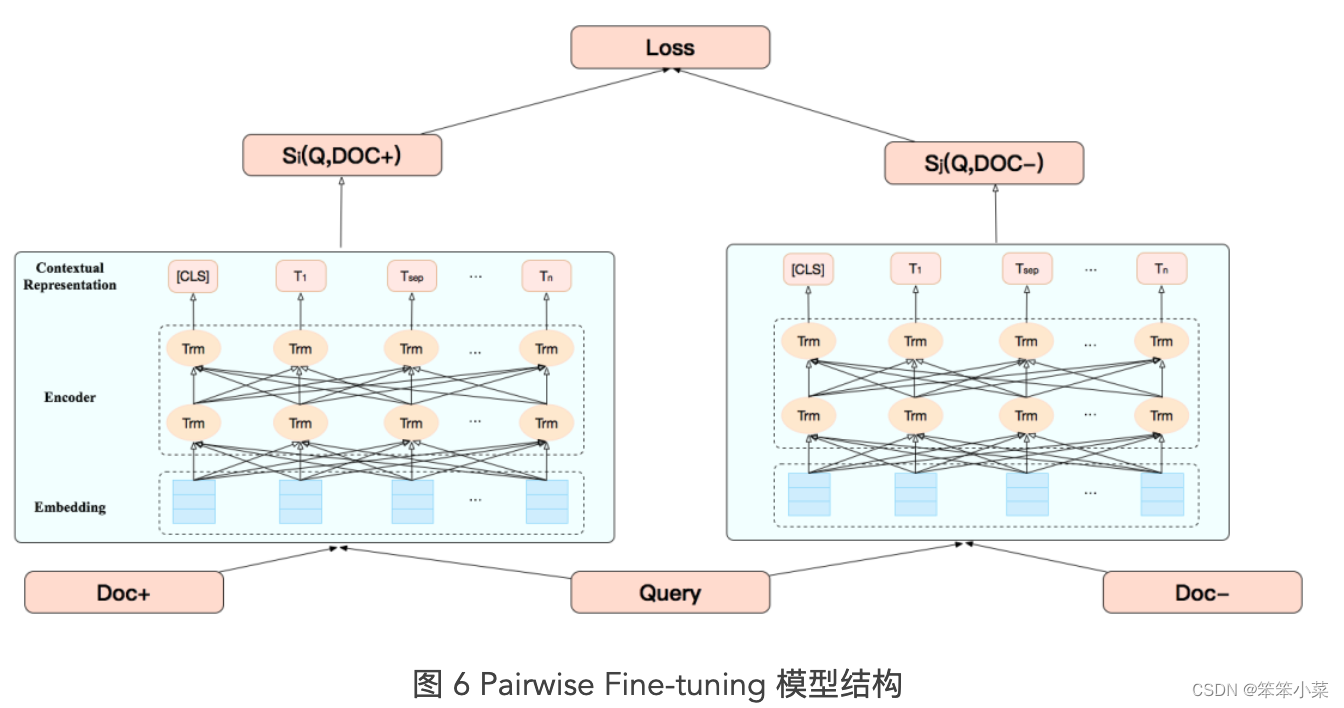
相关性-回忆录(持续更新)
1.TODO方向 (1)数据增强:finetuning阶段需要大量人工标注样本,消耗时间和成本。用户点击数据作为弱监督学习,可以尝试图网络构建节点和边(query聚合); 使用展现未点击生成对抗网络进…...
使用Python实现屏幕截图)
(必备技能)使用Python实现屏幕截图
(必备技能)使用Python实现屏幕截图 文章目录 (必备技能)使用Python实现屏幕截图 一、序言二、环境配置 1、下载pyautogui包2、下载opencv-python包3、下载PyQt5包4、下载pypiwin32包 三、屏幕截屏源码与解析 1、使用pyautogui方法实现截屏2、使用PyQt方法实现截屏 a.获取窗口…...

「数据仓库」怎么选择现代数据仓库?
构建自己的数据仓库时要考虑的基本因素我们用过很多数据仓库。当我们的客户问我们,对于他们成长中的公司来说,最好的数据仓库是什么时,我们会根据他们的具体需求来考虑答案。通常,他们需要几乎实时的数据,价格低廉&…...
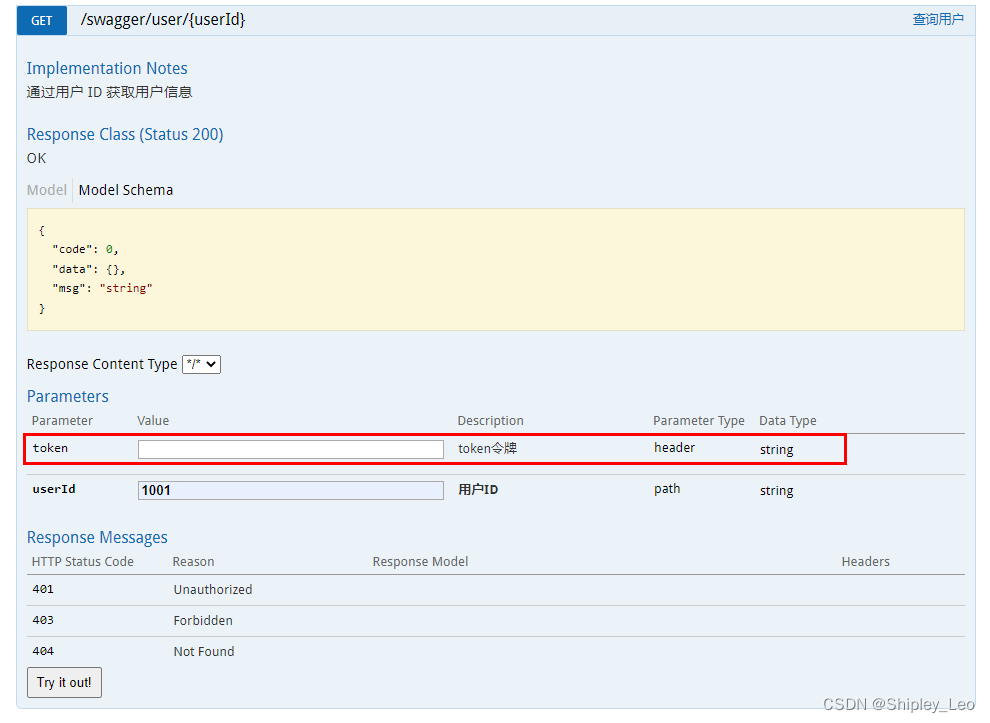
6.3 使用 Swagger 生成 Web API 文档
第6章 构建 RESTful 服务 6.1 RESTful 简介 6.2 构建 RESTful 应用接口 6.3 使用 Swagger 生成 Web API 文档 6.4 实战:实现 Web API 版本控制 6.3 使用 Swagger 生成 Web API 文档 高质量的 API 文档在系统开发的过程中非常重要。本节介绍什么是 Swaggerÿ…...
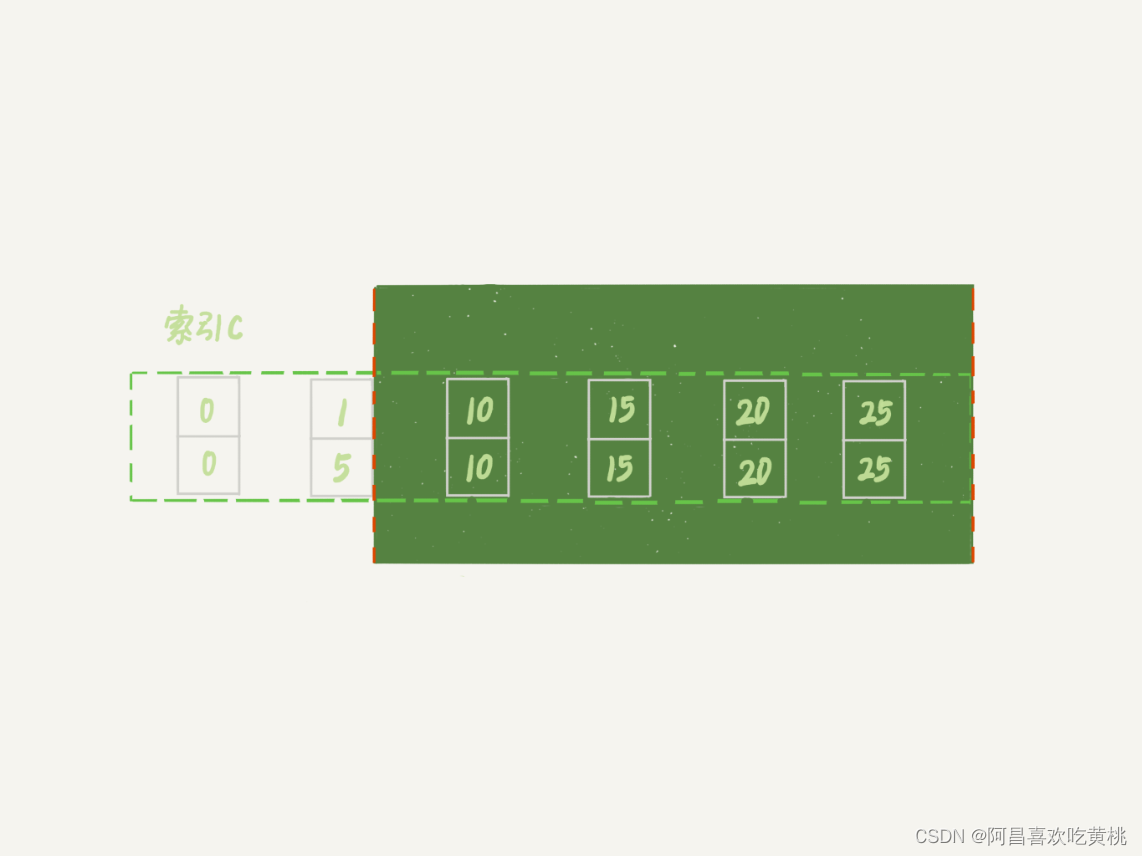
Day894.加锁规则的一些问题 -MySQL实战
加锁规则的一些问题 Hi,我是阿昌,今天学习记录的是关于加锁规则的一些问题的内容。 加锁规则,这个规则中,包含了两个“原则”、两个“优化”和一个“bug”: 原则 1:加锁的基本单位是 next-key lock。nex…...
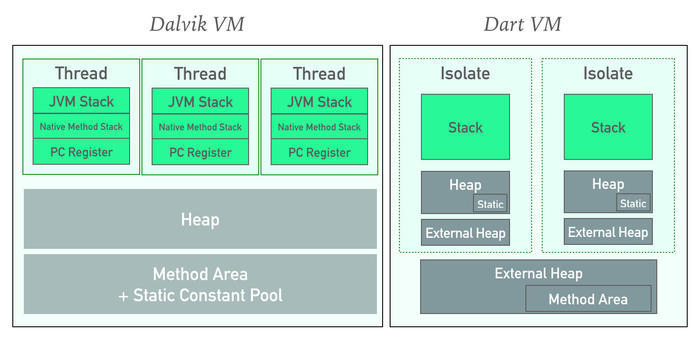
【Flutter入门到进阶】Dart进阶篇---Dart异步编程
1 并行与并发的编程区别 1.1 并发与并行 1.1.1 说明 我们举个例子,如果有条高速公路 A 上面并排有 8 条车道,那么最大的并行车辆就是 8 辆此条高速公路 A 同时并排行走的车辆小于等于 8 辆的时候,车辆就可以并行运行。 CPU 也是这个原理,一个 CPU 相当于一个高速公路 A,核心数…...
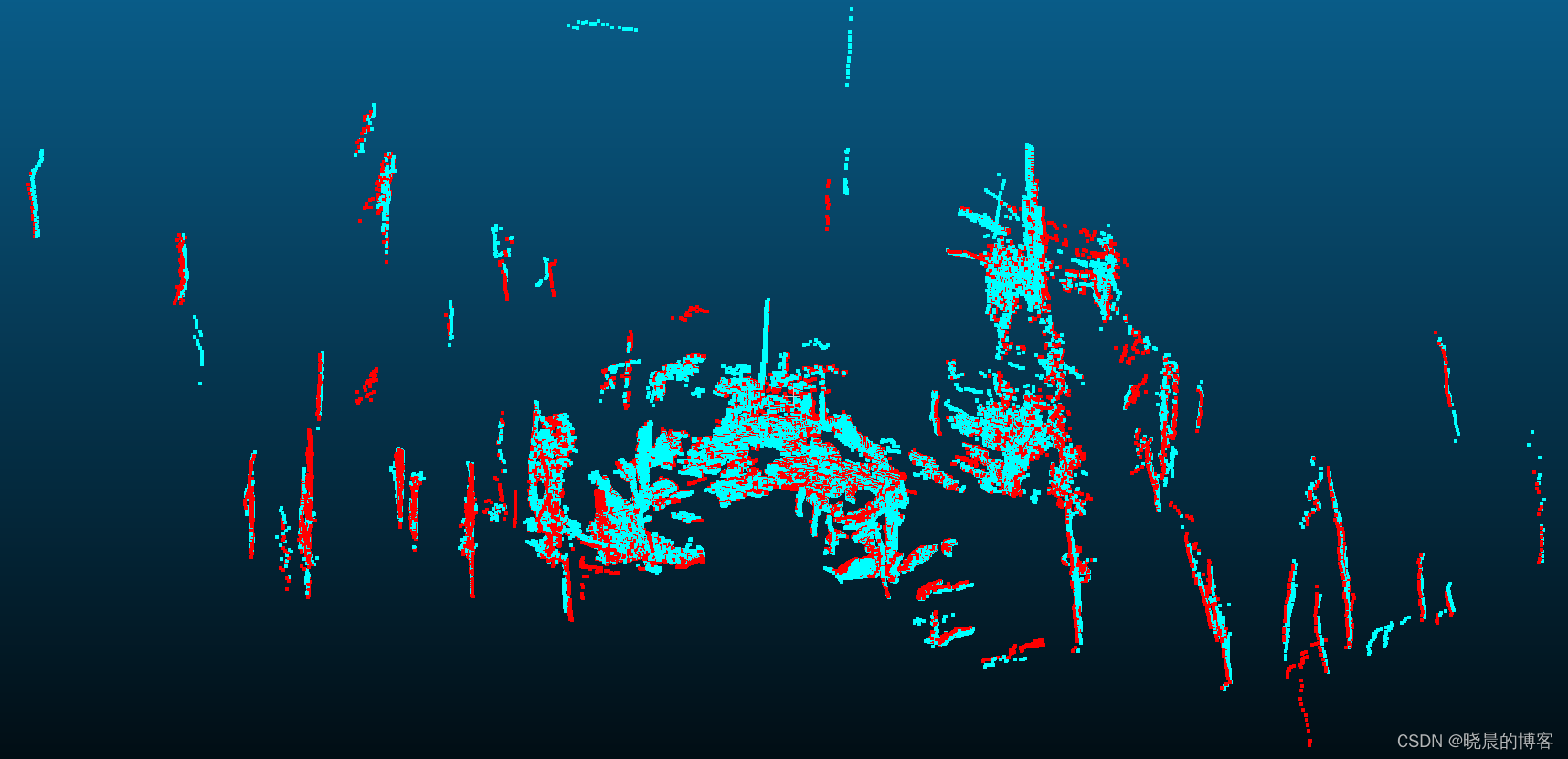
点云配准方法原理(NDT、ICP)
配准是点云处理中的一个基础问题,众多学者此问题进行了广泛而深入的研究,也出现了一系列优秀成熟的算法,在三维建模、自动驾驶等领域发挥着重要的作用。 本文主要介绍粗配准NDT (Normal Distribution Transform) 与 精配准ICP (Iterative Cl…...

大规模 IoT 边缘容器集群管理的几种架构-0-边缘容器及架构简介
📚️Reference: IoT 边缘计算系列文章 什么是边缘容器? 边缘容器的概念 边缘容器是分散的计算资源,尽可能靠近最终用户或设备,以减少延迟、节省带宽并增强整体数字体验。 可以访问互联网的设备数量每天都在增加。有包括但不限于…...
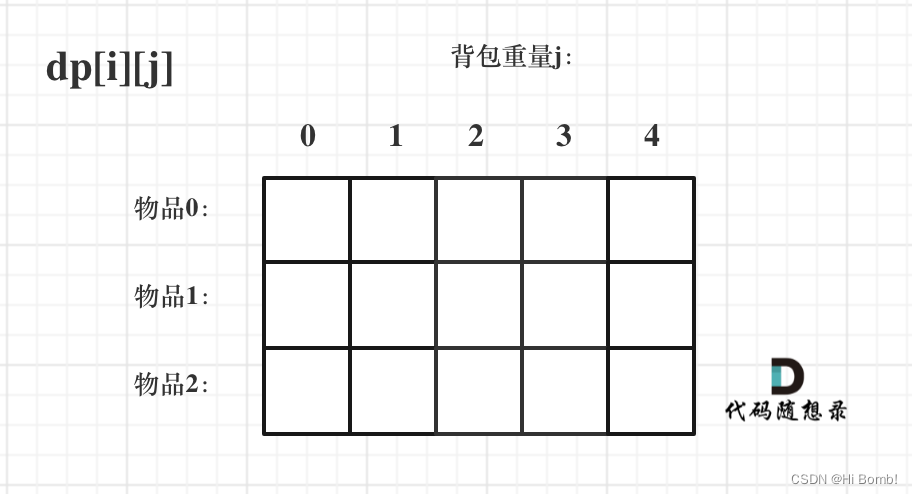
代码随想录算法训练营第45天动态规划 背包基础 1 2、 416. 分割等和子集
文章目录01背包基础 (二维数组)思路递推公式初始化遍历顺序一维dp数组(滚动数组)一维数组的递推公式遍历顺序LeetCode 416. 分割等和子集思路总结01背包基础 (二维数组) 思路 根据动态规划五部进行分析&a…...
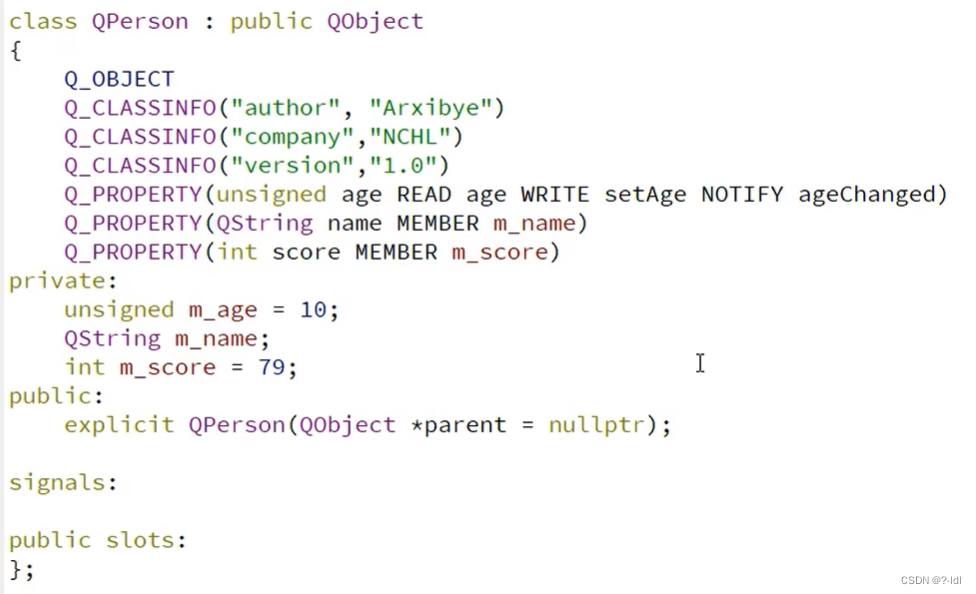
QT学习记录(六)类对象属性
类对象属性用来描述类对象的一些信息和当前的状态。类对象属性可以由类的编写者在编写类的时候定义,也可以由类的使用者在使用对象的时候定义。 由类的编写者定义 QPROPERTY()宏就是用来定义一个对象属性。 以第二行属性举例 QPROPERTY(bool enabled READ isEnabl…...

Spring Cloud Alibaba从搭建到源码完整进阶教程
微服务简介 Spring Cloud Alibaba 微服务简介 Nacos注册中心配置中心 Spring Cloud Nacos实战(一)- 下载和安装 Spring Cloud Nacos实战(二)- 服务提供者注册 Spring Cloud Nacos实战(三)- 服务消费者…...
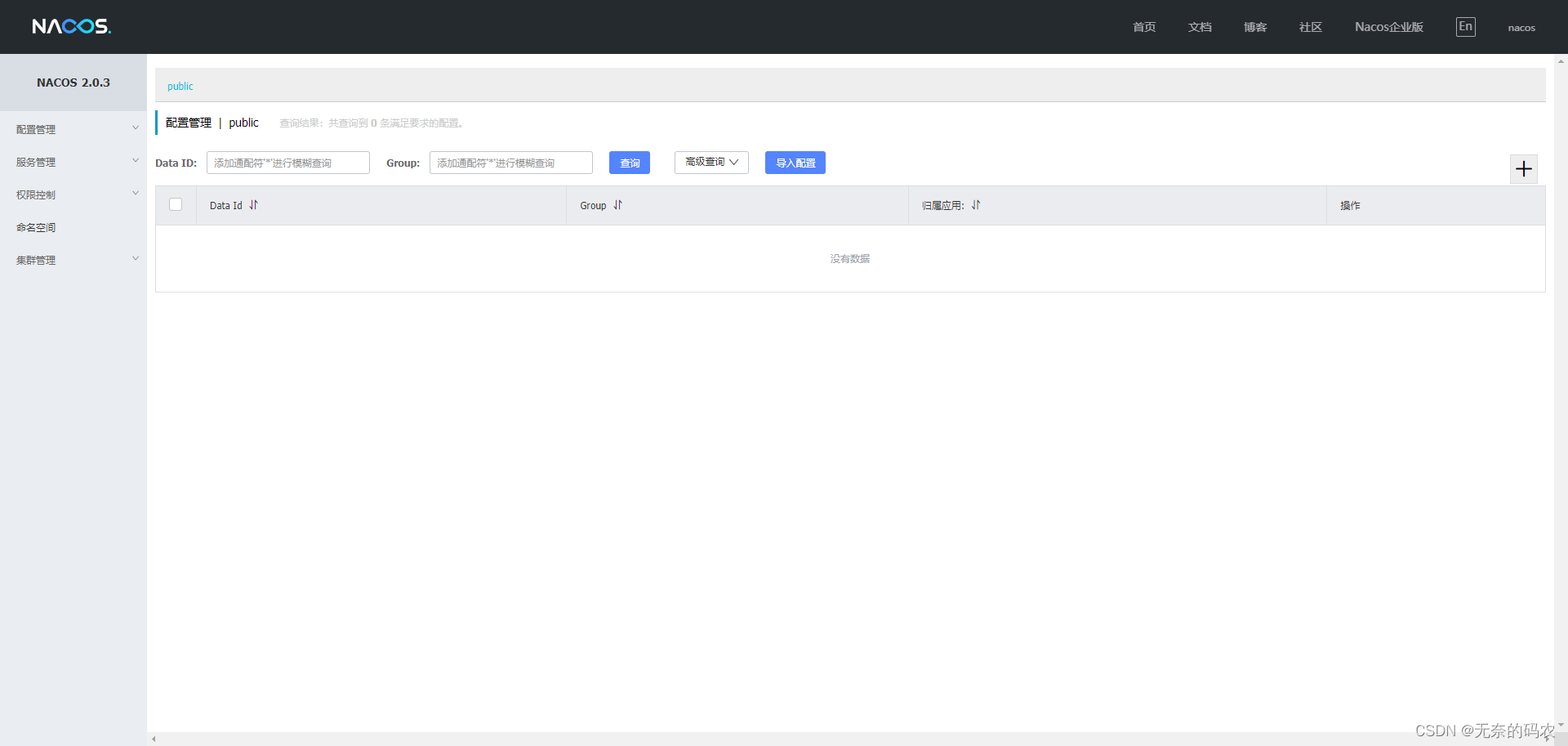
Spring Cloud Nacos实战(一)- 下载和安装
Spring Cloud Alibaba Nacos下载和安装 Nacos介绍 Nacos(Naming Configuration Service) 是一个易于使用的动态服务发现、配置和服务管理平台,用于构建云原生应用程序 服务发现是微服务架构中的关键组件之一。Nacos 致力于帮助您发现…...

深入理解设备像素比
文章目录参考描述像素分辨率显示分辨率图像分辨率物理分辨率分辨率单位(仅部分)DPIPPI设备像素比设备物理像素设备独立像素设备像素比产生放大与缩小尾声参考 项目描述关于物理像素、逻辑像素(css像素)、分辨率、像素比的超详细讲…...

汽车芯片市场深度解析:从电动化、智能化到供应链变革
1. 汽车芯片行业:短期阵痛与长期增长的辩证观最近和几个在车厂和Tier 1供应商做研发的老朋友聊天,大家普遍的感觉是:冰火两重天。一边是终端市场感觉“卷”得厉害,销量波动、价格战不停;另一边,研发部门的芯…...
)
AI原生多任务学习效能跃迁路径(SITS 2026工业级调参手册)
更多请点击: https://intelliparadigm.com 第一章:AI原生多任务学习:SITS 2026多目标优化实战技巧 在 SITS 2026 挑战赛中,AI 原生多任务学习(MTL)不再仅是共享底层表征的工程权衡,而是以任务语…...

R3nzSkin内存换肤技术实现与国服应用实践
R3nzSkin内存换肤技术实现与国服应用实践 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server R3nzSkin是一款专为中国服务器优化的英雄联盟内存换肤工具&am…...

Jellyfin.Plugin.MetaShark配置详解:10个关键设置优化你的元数据刮削体验
Jellyfin.Plugin.MetaShark配置详解:10个关键设置优化你的元数据刮削体验 【免费下载链接】jellyfin-plugin-metashark jellyfin电影元数据插件 项目地址: https://gitcode.com/gh_mirrors/je/jellyfin-plugin-metashark 想要让你的Jellyfin媒体库拥有丰富的…...

如何在Windows、Mac和Ubuntu上实现iOS虚拟定位的完整指南
如何在Windows、Mac和Ubuntu上实现iOS虚拟定位的完整指南 【免费下载链接】iFakeLocation Simulate locations on iOS devices on Windows, Mac and Ubuntu. 项目地址: https://gitcode.com/gh_mirrors/if/iFakeLocation iFakeLocation是一款革命性的开源工具࿰…...

自动化营销系统:高效破解市场-SDR销售线索流转堵点
在B2B营销中,线索从“获取”到“转化”的过程,往往伴随着大量的手动操作、信息断层和跟进滞后。尤其是市场团队与SDR(销售开发代表)之间的协作,常常成为线索流转的“瓶颈”。如何高效、规范地将市场获取的Leads转化为可…...

别让答辩 PPT 拖垮你的毕业季!PaperXie AI 帮你把论文成果 “说清楚”
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create 论文查重过了、导师意见改完了,你以为毕业的最后一关只剩答辩?可打开 PPT 的瞬间,很多人…...
显卡里的幽灵:我们是否也只是几分钟前被唤醒的玻尔兹曼大脑?)
(随想)显卡里的幽灵:我们是否也只是几分钟前被唤醒的玻尔兹曼大脑?
一个诡异的瞬间 之前一直用kimi2.5的API,每月花不少钱,肉疼。今天一咬牙,在自己的游戏显卡(RTX 4080)上部署GLM-4.7-Flash。 GPU嗡嗡响了几分钟,权重加载完毕,模型真跑起来了。我接上hermes&…...

5个简单步骤:用DXVK在Linux上流畅运行Windows游戏
5个简单步骤:用DXVK在Linux上流畅运行Windows游戏 【免费下载链接】dxvk Vulkan-based implementation of D3D8, 9, 10 and 11 for Linux / Wine 项目地址: https://gitcode.com/gh_mirrors/dx/dxvk 你是否曾经想在Linux系统上玩Windows游戏,却被…...
)
【SITS 2026 K8s for ML合规框架】:通过CNCF AI WG审核的3层资源隔离模型(含YAML模板+准入控制器配置)
更多请点击: https://intelliparadigm.com 第一章:AI原生Kubernetes编排:SITS 2026 K8s for ML工作负载 SITS 2026 引入了专为机器学习工作负载深度优化的 AI-native Kubernetes 编排层,突破传统 K8s 在资源弹性、拓扑感知与训练…...