强化学习:用Python训练一个简单的机器人

一、介绍
强化学习(RL)是一个令人兴奋的研究领域,它使机器能够通过与环境的交互来学习。在这篇博客中,我们将深入到RL的世界,并探索如何使用Python训练一个简单的机器人。在本文结束时,您将对 RL 概念有基本的了解,并能够实现自己的 RL 代理。
设置环境:首先,让我们为机器人设置一个简单的环境。我们将创建一个2D网格世界,机器人需要从起始位置导航到目标位置,同时避开障碍物。
# Define the environment
grid_size = 5
num_actions = 4
start_state = (0, 0)
goal_state = (grid_size - 1, grid_size - 1)
obstacles = [(1, 1), (2, 2), (3, 3)]二、实现代理
我们将使用Q学习算法,一种流行的RL技术,来训练我们的机器人。Q 学习涉及构建一个表,称为 Q 表,该表将状态操作对映射到相应的 Q 值。这些 Q 值表示代理通过在给定状态下执行特定操作可以获得的预期奖励。
import numpy as np# Initialize the Q-table
q_table = np.zeros((grid_size, grid_size, num_actions))# Set hyperparameters
alpha = 0.1 # Learning rate
gamma = 0.6 # Discount factor
epsilon = 0.1 # Exploration vs. exploitation factor# Define reward and transition functions
def get_reward(state):if state == goal_state:return 10elif state in obstacles:return -10else:return -1def get_next_state(state, action):x, y = stateif action == 0: # Move upnext_state = (max(x - 1, 0), y)elif action == 1: # Move downnext_state = (min(x + 1, grid_size - 1), y)elif action == 2: # Move leftnext_state = (x, max(y - 1, 0))else: # Move rightnext_state = (x, min(y + 1, grid_size - 1))return next_state三、训练循环
现在,让我们使用 Q 学习算法实现训练循环。代理将探索环境,根据收到的奖励更新Q值,并逐步改进其决策过程。
# Training loop
num_episodes = 1000
for episode in range(num_episodes):state = start_statedone = Falsewhile not done:# Exploration vs. exploitationif np.random.uniform(0, 1) < epsilon:action = np.random.randint(num_actions)else:action = np.argmax(q_table[state])next_state = get_next_state(state, action)reward = get_reward(next_state)# Update Q-valueq_table[state][action] += alpha * (reward + gamma * np.max(q_table[next_state]) - q_table[state][action])state = next_stateif state == goal_state or state in obstacles:done = True四、测试:
训练完成后,我们可以通过让训练代理使用学习的 Q 值在环境中导航来评估其性能。
# Testing the trained agent
state = start_state
done = Falsewhile not done:action = np.argmax(q_table[state])next_state = get_next_state(state, action)reward = get_reward(next_state)state = next_stateprint(f"Current state: {state}")if state == goal_state or state in obstacles:done = True五、结论
强化学习是一种强大的技术,它允许机器从与环境的交互中学习。通过在Python中实现Q学习算法,我们训练了一个简单的机器人来导航网格世界。通过探索和开发,机器人学会了根据它获得的奖励做出最佳决策。RL 为训练智能代理以解决复杂问题提供了无限的可能性,并在机器人、游戏、自主系统等领域都有应用。
相关文章:
强化学习:用Python训练一个简单的机器人
一、介绍 强化学习(RL)是一个令人兴奋的研究领域,它使机器能够通过与环境的交互来学习。在这篇博客中,我们将深入到RL的世界,并探索如何使用Python训练一个简单的机器人。在本文结束时,您将对 RL 概念有基本…...

【Docker】Docker使用之容器技术发展史
🎬 博客主页:博主链接 🎥 本文由 M malloc 原创,首发于 CSDN🙉 🎄 学习专栏推荐:LeetCode刷题集 🏅 欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正࿰…...
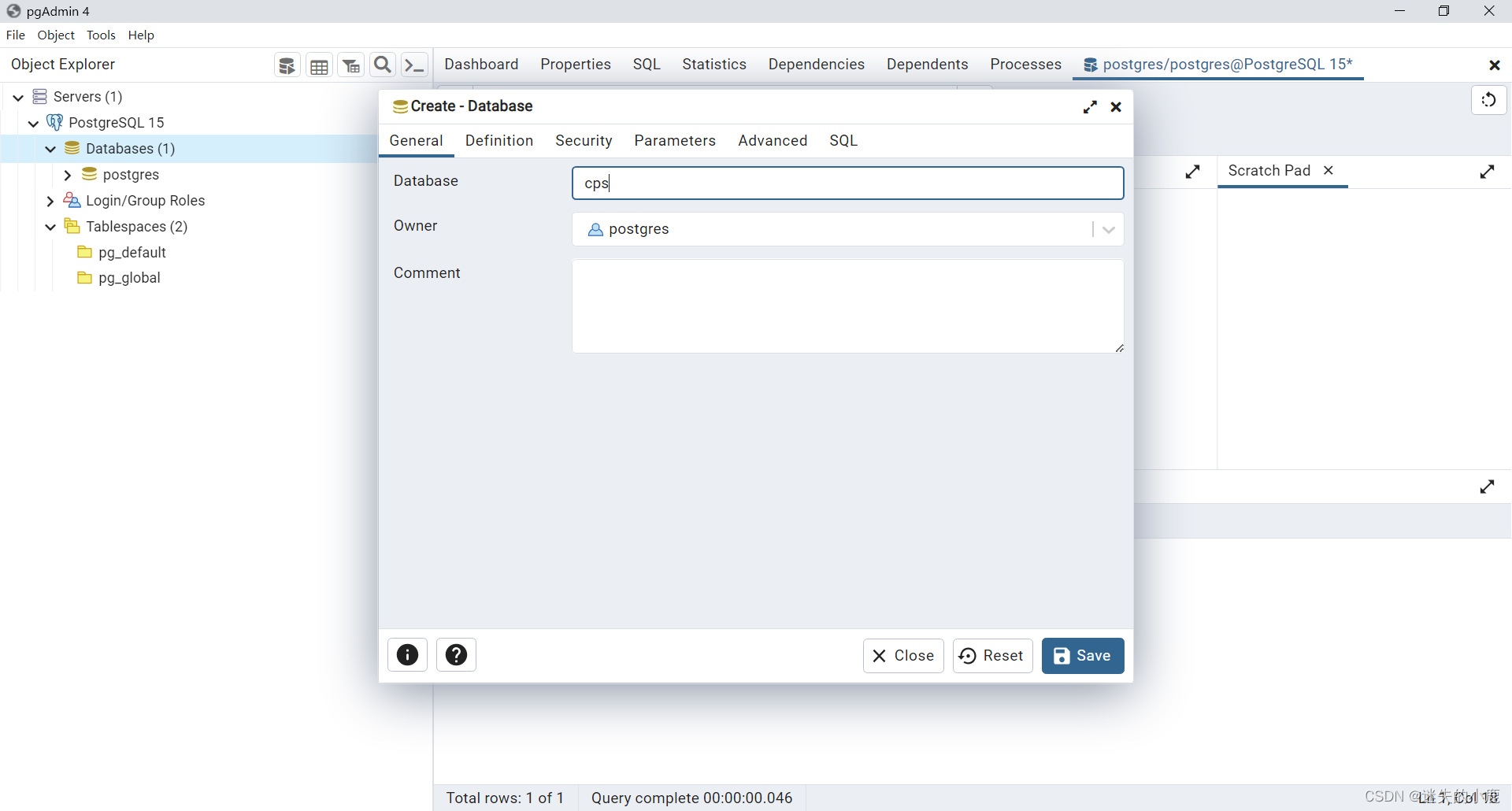
postgresql的在windows下的安装
postgresql的在windows下的安装 下载安装步骤超级用户设置密码本地化设置安装信息安装完成 查看postgresql服务pgAdmin的使用打开命令 行工具查询数据库版本 创建数据库 下载 官网地址 https://www.postgresql.org/ 下载页面 https://www.postgresql.org/download/ windows下…...
python 自动化学习(四) pyppeteer 浏览器操作自动化
背景 之前我在工作中涉及到了很多地方都是重复性的页面点点点工作,又因为安全保密原则不开放接口和数据库,只有一个页面来提供点击进行操作,就想着用前面学的自动化来实现,但发现前面学的模拟操作对浏览器来说并没有那么友好&…...

P1009 阶乘之和
[NOIP1998 普及组] 阶乘之和 题目描述 用高精度计算出 S 1 ! 2 ! 3 ! ⋯ n ! S 1! 2! 3! \cdots n! S1!2!3!⋯n!( n ≤ 50 n \le 50 n≤50)。 其中 ! 表示阶乘,定义为 n ! n ( n − 1 ) ( n − 2 ) ⋯ 1 n!n\times (n-1)…...
)
Linux内核源码剖析之TCP保活机制(KeepAlive)
写在前面: 版本信息: Linux内核2.6.24(大部分centos、ubuntu应该都在3.1。但是2.6的版本比较稳定,后续版本本质变化也不是很大) ipv4 协议 https://blog.csdn.net/ComplexMaze/article/details/124201088 本文使用案例…...

后端 springboot 给 vue 提供参数
前端 /** 发起新增或修改的请求 */requestAddOrEdit(formData) {debuggerif(formData.id undefined) {formData.id }getAction(/material/getNameModelStandard, {standard: this.model.standard,name: this.model.name,model: this.model.model}).then((res) > {if (res …...
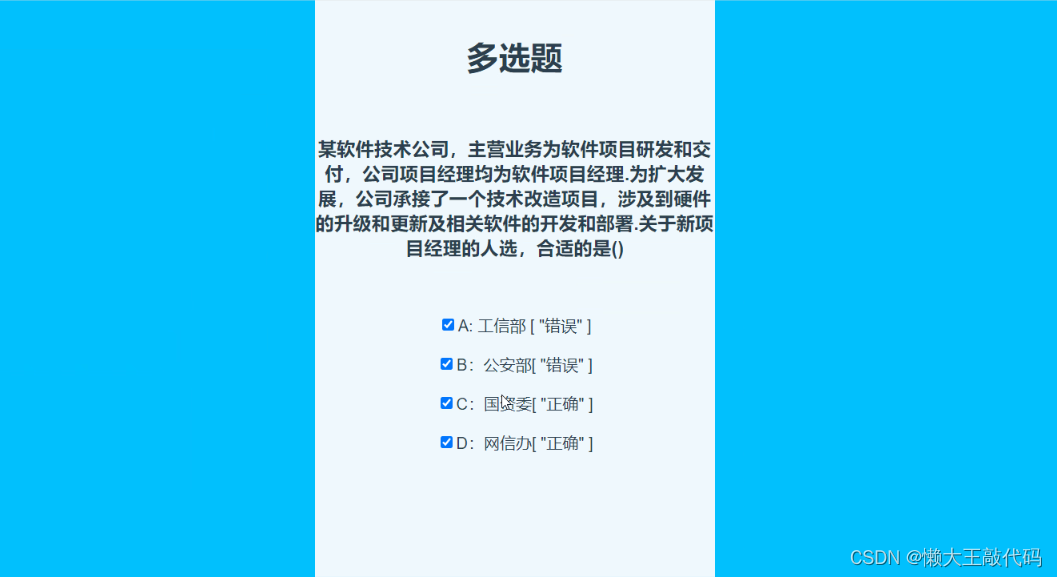
《vue3实战》运用radio单选按钮或Checkbox复选框实现单选多选的试卷制作
文章目录 目录 系列文章目录 1.《Vue3实战》使用axios获取文件数据以及走马灯Element plus的运用 2.《Vue3实战》用路由实现跳转登录、退出登录以及路由全局守护 3.《vue3实战》运用Checkbox复选框实现单选多选的试卷展现(本文) 文章目录 前言 radio是什…...
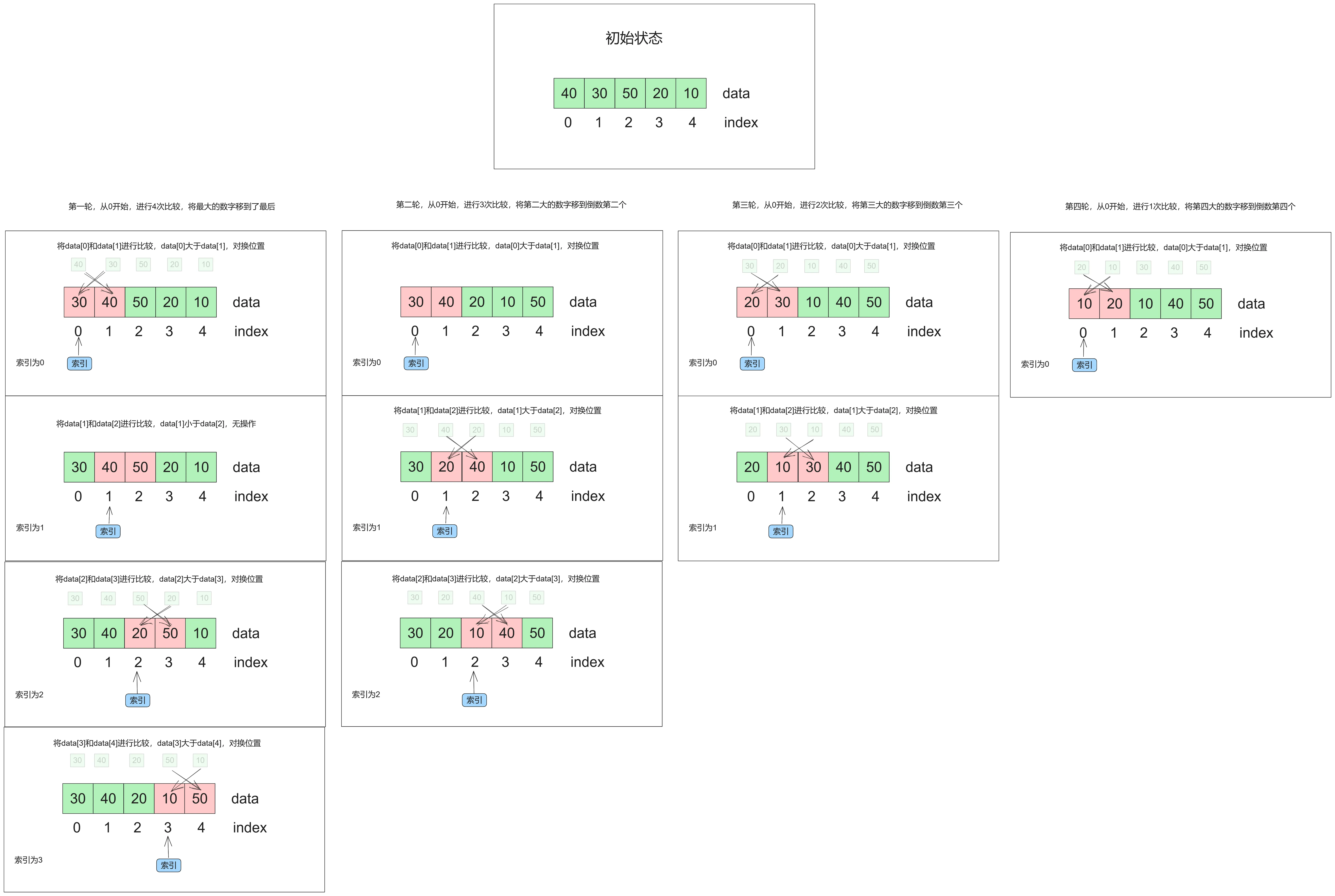
排序算法-冒泡排序(C语言实现)
简介😀 冒泡排序是一种简单但效率较低的排序算法。它重复地扫描待排序元素列表,比较相邻的两个元素,并将顺序错误的元素交换位置,直到整个列表排序完成。 实现🧐 以下内容为本人原创,经过自己整理得出&am…...

星际争霸之小霸王之小蜜蜂(一)
目录 前言 一、安装pygame库 1、pygame库简介 2、在windows系统安装pygame库 二 、搭建游戏框架 1、创建游戏窗口 2、改变窗口颜色 总结 前言 大家应该都看过或者都听说过python神书“大蟒蛇”,上面有一个案例是《外星人入侵》,游戏介绍让我想起了上…...

图数据库_Neo4j基于docker服务版安装_Neo4j Desktop桌面版安装---Neo4j图数据库工作笔记0004
然后我们来看看如何用docker来安装Neo4j community server 首先去执行docker pull neo4j:3.5.22-community 去拉取镜像 然后执行命令就可以安装了 可以用docker ps查看一下 看看暴露了哪些端口 然后再看一下访问一下这个时候,要用IP地址了注意 然后再来看一下安装Desktop 去下…...

docker-compose部署可道云
文章目录 一. Mac1.1 下载源码1.2 部署1.2.1 修改密码部署(可忽略)1.2.2 直接部署 1.3 卸载1.4 访问 二. Win2.1 下载源码2.2 部署2.2.1 修改密码部署(可忽略)2.2.2 直接部署 2.3 卸载 一. Mac 1.1 下载源码 mkdir -p /Users/wanfei/docker-compose && cd /Users/wan…...

Windows上使用FFmpeg实现本地视频推送模拟海康协议rtsp视频流
场景 Nginx搭建RTMP服务器FFmpeg实现海康威视摄像头预览: Nginx搭建RTMP服务器FFmpeg实现海康威视摄像头预览_nginx rtmp 海康摄像头_霸道流氓气质的博客-CSDN博客 上面记录的是使用FFmpeg拉取海康协议摄像头的rtsp流并推流到流媒体服务器。 如果在其它业务场景…...

单片机之从C语言基础到专家编程 - 4 C语言基础 - 4.8 运算符
1.算术运算符 运算符名称备注加法运算符双目运算,a b-减法运算符双目运算,a - b*乘法运算符双目运算,a * b/除法运算符双目运算,a / b%求余运算符双目运算, a % b自增运算符单目运算, a–自减运算符单目运算, a– 2.关系运算符…...
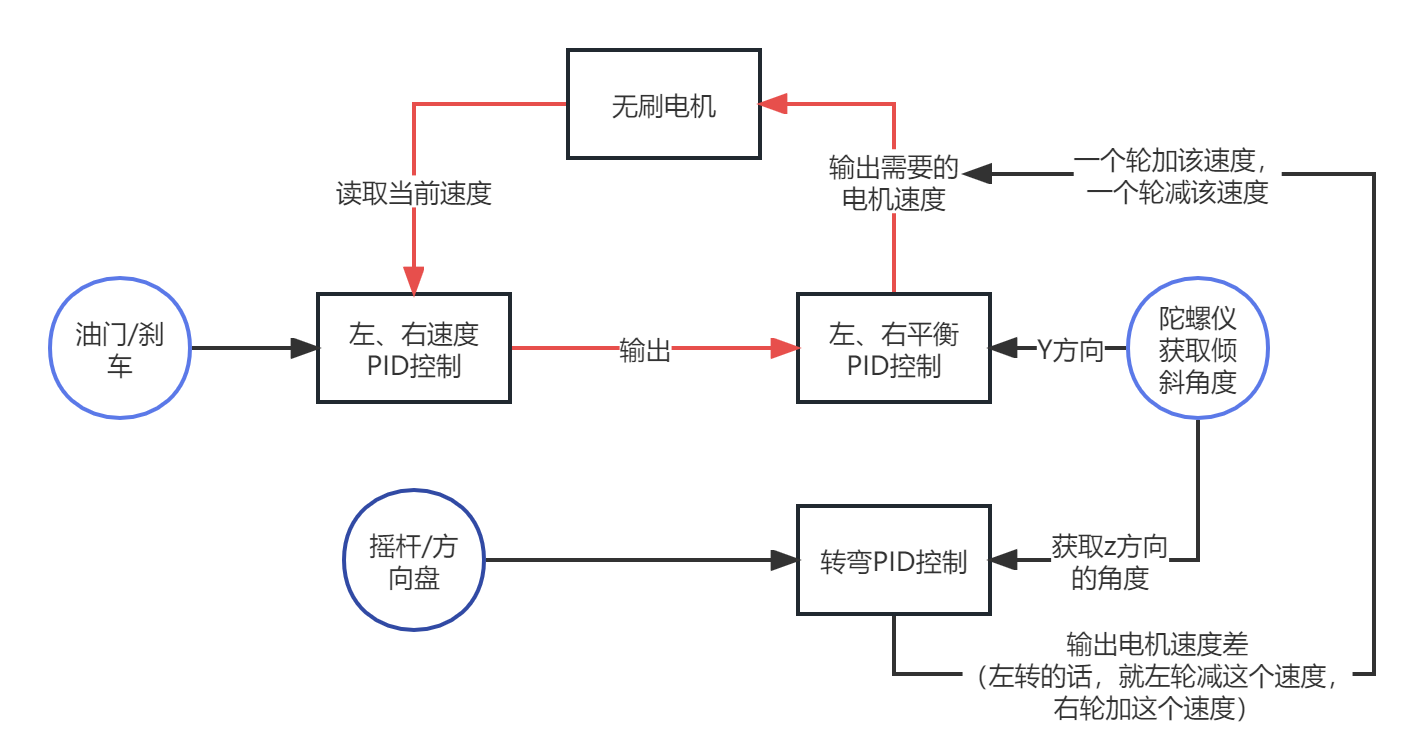
轮腿机器人的PID控制
1 PID介绍 PID(Proportional Integral Derivative)控制系统。其实质是根据输入的偏差值,按比例、积分、微分的函数关系进行运算,运算结果用以输出进行控制。它是在长期的工程实践中总结出来的一套控制方法,实际运行经…...

ChatGPT爆火,会给教育带来什么样的影响或者冲击?
近来,人工智能聊天机器人ChatGPT连上热搜,火爆全网。ChatGPT拥有强大的信息整合能力、自然语言处理能力,可谓是“上知天文,下知地理”,而且还能根据要求进行聊天、撰写文章等。 ChatGPT一经推出,便迅速在社…...

Servlet+JDBC实战开发书店项目讲解第三篇:商品查询实现
ServletJDBC实战开发书店项目讲解第三篇:商品查询实现 本篇博客将介绍如何在ServletJDBC实战开发书店项目中实现商品查询功能。我们将从设计数据库表结构和实体类开始,一步一步详细讲解代码实现过程,包括前端页面的设计和后端Servlet代码的编…...
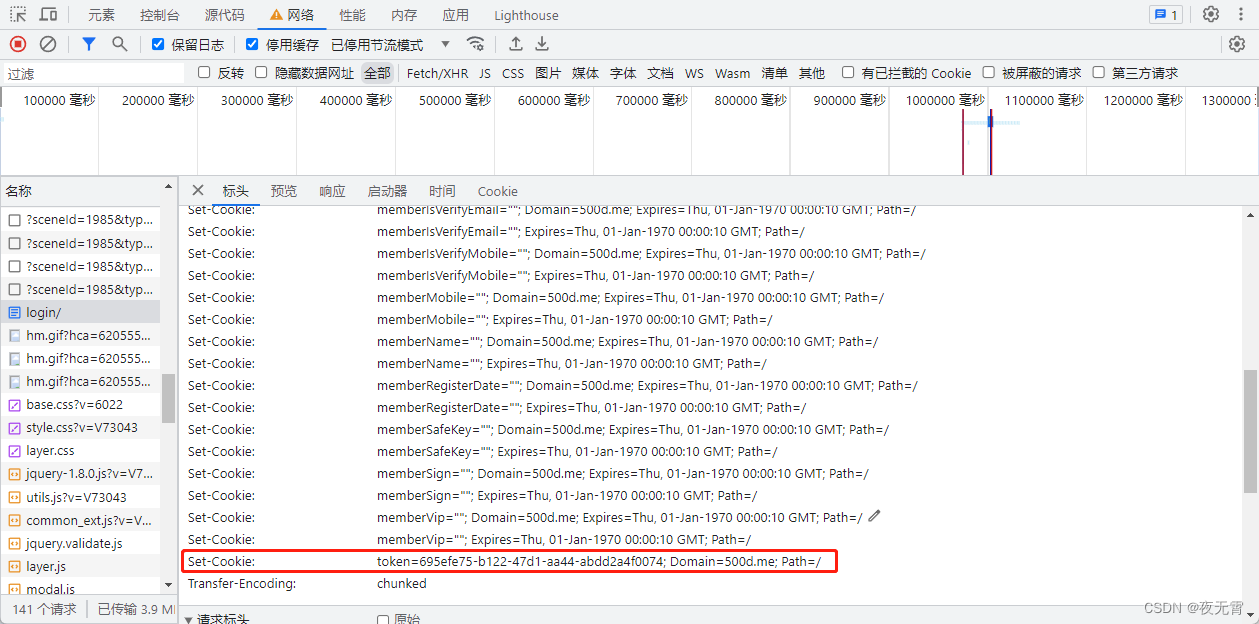
爬虫逆向实战(十七)--某某丁简历登录
一、数据接口分析 主页地址:某某丁简历 1、抓包 通过抓包可以发现数据接口是submit 2、判断是否有加密参数 请求参数是否加密? 通过查看“载荷”模块可以发现有一个enPassword加密参数 请求头是否加密? 通过查看请求头可以发现有一个To…...
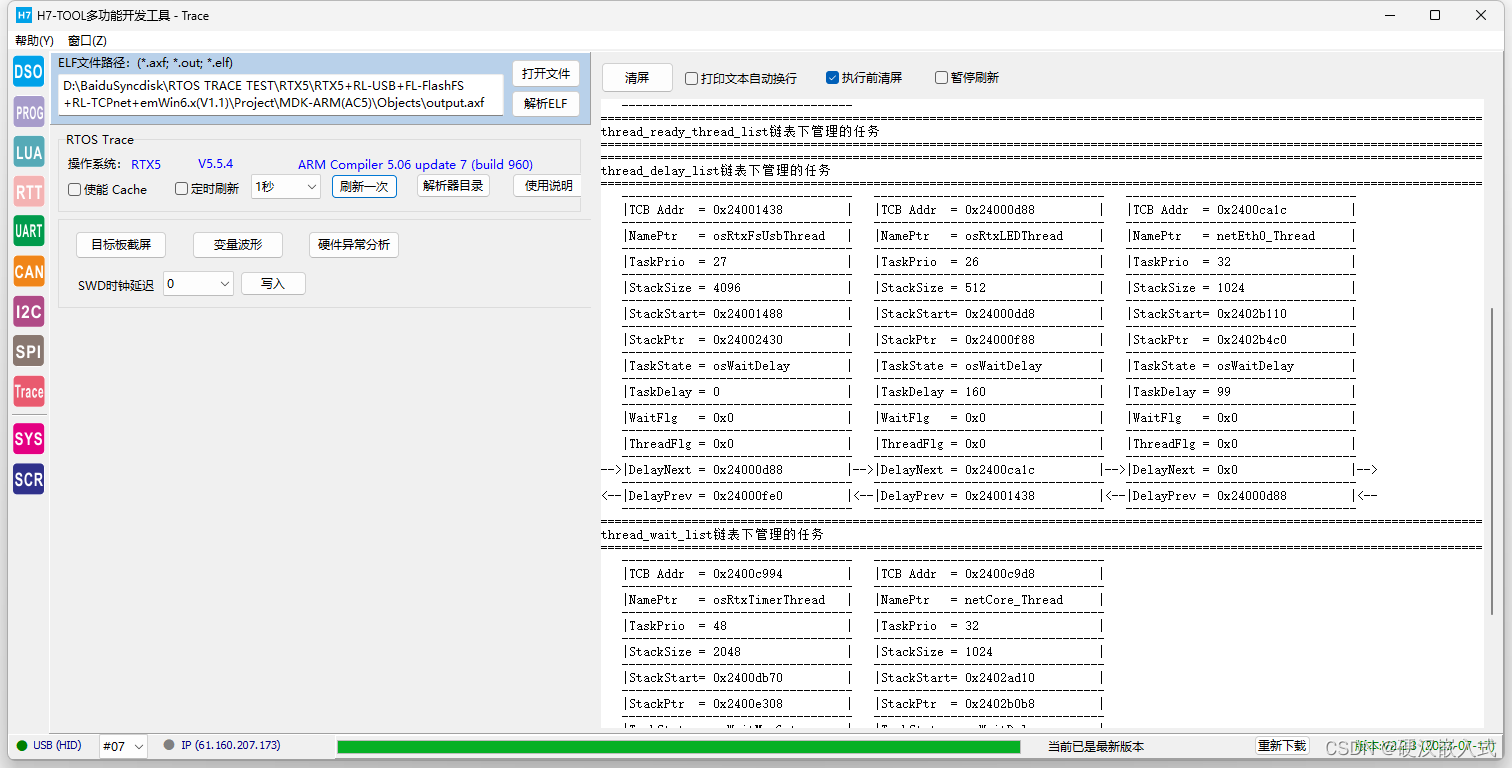
《安富莱嵌入式周报》第320期:键盘敲击声解码, 军工级boot设计,开源CNC运动控制器,C语言设计笔记,开源GPS车辆跟踪器,一键生成RTOS任务链表
周报汇总地址:嵌入式周报 - uCOS & uCGUI & emWin & embOS & TouchGFX & ThreadX - 硬汉嵌入式论坛 - Powered by Discuz! 视频版: https://www.bilibili.com/video/BV1Cr4y1d7Mp/ 《安富莱嵌入式周报》第320期:键盘敲击…...
DRF 缓存
应用环境 django4.2.3 ,python3.10 由于对于服务而言,有些数据查询起来比较费时,所以,对于有些数据,我们需要将其缓存。 最近做了一个服务,用的时 DRF 的架构,刚好涉及缓存,特此记…...

【YOLOv5 v6.1】从零到一:手把手实战自定义数据集训练与部署避坑指南
1. 环境准备:从零搭建YOLOv5训练环境 第一次接触YOLOv5时,我最头疼的就是环境配置。这里分享一个经过多次验证的稳定方案,适用于大多数NVIDIA显卡设备。首先需要安装Anaconda,这是管理Python环境的利器。我习惯用Miniconda&#x…...

第11篇 安全配置实战:SASL_SSL + SCRAM-SHA-512
第11篇:安全配置实战 —— SASL_SSL + SCRAM-SHA-512 生产落地 系列:Kafka Spring Boot:参数精讲与生产落地实战 本篇关键词:security.protocol SASL SCRAM-SHA-512 SSL TrustStore 生产安全配置 📌 本篇导读 内网开发环境用 PLAINTEXT 完全没问题。但一旦涉及: 云…...

VS2019编译OpenCASCADE 7.6.0避坑实录:从custom.bat修改到Demo测试,一次搞定
VS2019编译OpenCASCADE 7.6.0全流程避坑指南 在三维建模与CAD开发领域,OpenCASCADE作为开源几何内核引擎,其强大的BRep建模和STEP文件处理能力备受开发者青睐。然而对于初次接触OCC的Windows平台开发者而言,在Visual Studio 2019环境下完成从…...
)
告别手动传图!用PicGo+Gitee给Typora配个自动图床(保姆级配置+避坑清单)
打造无缝Markdown写作体验:自动化图床配置全攻略 在技术写作和知识管理的世界里,Markdown已经成为事实上的标准格式。然而,一个长期困扰写作者的问题始终存在——图片管理。传统方式需要手动上传图片到图床,复制链接,再…...

【致91岁的双胞胎】堡垒复习:3步搭建理科“作战地图”,告别零散刷题效率翻倍
很多学生长期陷入理科复习瓶颈:花费大量时间刷题、背书,成绩却始终原地踏步。核心根源只有一个:照搬文科的复习方式学理科。 文科复习侧重知识点记忆、框架梳理、素材积累,通用的A4纸整理法完全适用;但理科的核心是逻辑闭环、体系串联、题型落地、抗遗忘复盘,死记硬背、…...

【笔记】旧AI,新人类
AI擅长"旧",人类擅长"新" 关于人机分工的一点思考 不久前,一场颇具戏剧性的"人机对决"在餐饮界引起了不小的波澜。"美膳狮"智能炒菜机器人与湘菜厨师杨孙同台竞技,共同炒制三道菜:XO酱笋…...

Perplexity+知网联合检索的7类失效场景全图谱:从DOI解析失败到CSSCI标识丢失的终极修复手册
更多请点击: https://intelliparadigm.com 第一章:Perplexity知网联合检索的失效机理总论 当用户尝试将 Perplexity AI 的实时网络推理能力与知网(CNKI)学术资源库进行协同调用时,系统级耦合在协议层、语义层与权限层…...
)
ENSP USG6000防火墙CPU占用飙到99%?可能是你的“小云朵”网卡选错了(VMware网卡避坑指南)
ENSP USG6000防火墙CPU占用率优化实战:VMware虚拟网卡配置全解析 当你在ENSP中成功启动USG6000防火墙后,是否遭遇过整个系统突然变得异常卡顿?打开任务管理器,发现ENSP进程的CPU占用率直逼99%,仿佛你的电脑正在执行某种…...

Gemini 垂直行业模型路由:按意图选择不同Prompt与参数集
在AI开发社区里,不少工程师都在尝试把多个大模型接入实际项目。工具整合站点作为AI模型聚合平台,让开发者能快速对比Gemini与其他模型在不同行业场景下的表现。今天我们来聊聊如何为Gemini搭建一套垂直行业模型路由机制,根据用户意图自动选择…...

普通人如何从零开始搭建自己的AI标题助手?低成本实战指南
就在今天,我刷到了一篇爆文,其标题乃是“用AI制作标题,短短3分钟就能产出100个爆款,而我的阅读量竟翻了5倍之多”,随后我点了进去,看过之后,又将其关掉,此时心里略微有那么点儿不是滋…...