【IMX6ULL驱动开发学习】07.驱动程序分离的思想之平台总线设备驱动模型和设备树
一、驱动程序分离的思想
【IMX6ULL驱动开发学习】05.字符设备驱动开发模板(包括读写函数、poll机制、异步通知、定时器、中断、自动创建设备节点和环形缓冲区)_阿龙还在写代码的博客-CSDN博客
之前编写驱动程序的代码存在不少弊端:移植性差,驱动程序移植到别的板子上时,开发者需要修改引脚。,并且还要重新编译驱动程序或内核。为提高移植和开发效率,驱动程序分离编程的思想尤为重要。

首先我们要知道: 内核里有个结构体platform_bus_type(虚拟的总线),总线上抽象出两个链表:设备链表和驱动链表。
我们在写驱动程序时,可以构造platfrom_device结构体,然后把它添加进内核里(platform_device_register函数),就是放入platform_bus_type结构体的设备链表中。
驱动程序会调用两个函数,注册platform_device结构体和platform_driver结构体。platform_device结构体里含有硬件资源,包括寄存器地址、内存地址、中断号;platform_driver结构体里有通用的代码。 以前写驱动程序时,只写成一个.c文件,在入口函数里注册字符设备驱动程序;现在需要故意拆分成两个文件gpio_drv.c和gpio_dev.c。
在gpio_drv.c的入口函数里注册platform_driver结构体(用到platform_driver_register函数),在gpio_dev.c的入口函数里注册platform_device结构体(用到platform_device_register函数),该函数会把要注册的platform_device结构体放入内核中platform_bus_type结构体(虚拟总线)的设备链表,并且会遍历platform_bus_type结构体(虚拟总线)的驱动链表,将platform_device结构体和每一个platform_driver结构体进行比较(为硬件设备找驱动程序),匹配成功后就不会往后比较了。
如果匹配成功,会调用platform_driver结构体中的probe函数。在probe函数中完成:①从platform_device结构体中得到引脚编号 ②注册字符设备驱动程序。
如果事先添加了设备(platform_device结构体),但并没找到与之匹配的驱动程序(platform_driver结构体)。之后添加驱动时,会遍历设备链表,若匹配成功则调用驱动的probe函数。且一个驱动可能支持多个设备。
二、设备树
gpio_dev.c和设备树的目的都是为了构造platform_device结构体。如果用gpio_dev.c时需要每次都修改引脚,重新编译和安装,导致内核里有很多冗余的gpio_dev.c文件和platform_device结构体。 使用设备树:在设备树文件中添加节点信息,根据节点信息,内核会构造出platform_device结构体。
板子启动时有个uboot,uboot会做两件事:①板子上如果有SD卡,SD卡中存放有设备树dtb文件,uboot会把设备树文件读入到内存中;②SD卡中还有内核,uboot会把内核读入内存;③启动内核,uboot会把设备树的地址传入内核,内核会这个地址上把设备树文件解析成各种platform_device结构体。
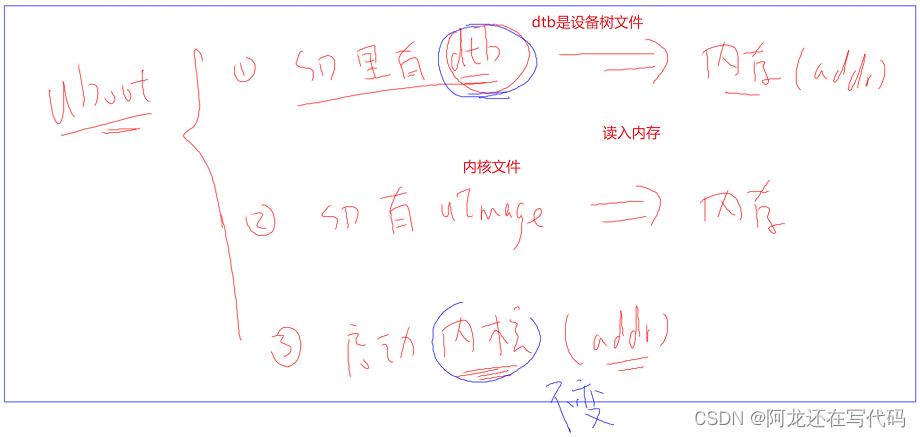
以后产品修改了引脚,我们只需要修改设备树dtb文件就可以了。内核不变,变设备树文件。
2.1 使用设备树
- 修改设备树:
arch/arm/boot/dts/100ask_imx6ull-14x14.dts
在设备树文件中添加节点信息,注意compatible与驱动的compatible匹配
motor {compatible = "100ask,gpiodemo";gpios = <&gpio4 19 GPIO_ACTIVE_HIGH>, <&gpio4 20 GPIO_ACTIVE_HIGH>,<&gpio4 21 GPIO_ACTIVE_HIGH>,<&gpio4 22 GPIO_ACTIVE_HIGH>;
};- 编译:make dtbs
- 复制到板子上
PC:
cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/开发板:
mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt
cp /mnt/100ask_imx6ull-14x14.dtb /boot
reboot- 测试
insmod gpio_drv.ko
./button_test /dev/gpio ...三、平台总线设备驱动模板
支持platfrom_device来自自己写的.c文件和更改的设备树文件,包括中断、定时器、读写、poll机制、异步通知。驱动程序如下:
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>struct gpio_desc{int gpio;int irq;char name[128];int key;struct timer_list key_timer;
} ;static struct gpio_desc *gpios;
static int count;/* 主设备号 */
static int major = 0;
static struct class *gpio_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);// static void key_timer_expire(struct timer_list *t)
static void key_timer_expire(unsigned long data)
{/* data ==> gpio */// struct gpio_desc *gpio_desc = from_timer(gpio_desc, t, key_timer);struct gpio_desc *gpio_desc = (struct gpio_desc *)data;int val;int key;val = gpio_get_value(gpio_desc->gpio);//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);key = (gpio_desc->key) | (val<<8);put_key(key);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;wait_event_interruptible(gpio_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}static ssize_t gpio_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{unsigned char ker_buf[2];int err;if (size != 2)return -EINVAL;err = copy_from_user(ker_buf, buf, size);if (ker_buf[0] >= sizeof(gpios)/sizeof(gpios[0]))return -EINVAL;gpio_set_value(gpios[ker_buf[0]].gpio, ker_buf[1]);return 2;
}static unsigned int gpio_drv_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int gpio_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = gpio_drv_read,.write = gpio_drv_write,.poll = gpio_drv_poll,.fasync = gpio_drv_fasync,
};static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_desc *gpio_desc = dev_id;printk("gpio_key_isr key %d irq happened\n", gpio_desc->gpio);mod_timer(&gpio_desc->key_timer, jiffies + HZ/5);return IRQ_HANDLED;
}/* 在入口函数 */
static int gpio_drv_probe(struct platform_device *pdev)
{int err = 0;int i;//平台设备里面有设备树节点信息//如果平台设备platform_device来自设备树的话,np就不是NULLstruct device_node *np = pdev->dev.of_node;//资源指针 struct resource *res;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);/* 从platfrom_device获得引脚信息 * 1. pdev来自自己写的c文件* 2. pdev来自设备树(在设备树文件中添加硬件的节点信息)*/if (np){/* pdev来自设备树 设备树节点信息示例:reg_usb_ltemodule: regulator@1 {compatible = "100ask,gpiodemo";gpios = <&gpio5 5 GPIO_ACTIVE_HIGH>, <&gpio5 3 GPIO_ACTIVE_HIGH>;};*/count = of_gpio_count(np);//获得这个设备信息:多少个引脚if (!count)return -EINVAL;gpios = kmalloc(count * sizeof(struct gpio_desc), GFP_KERNEL);for (i = 0; i < count; i++){gpios[i].gpio = of_get_gpio(np, i);//取出这个设备的第i个引脚的引脚编号sprintf(gpios[i].name, "%s_pin_%d", np->name, i);//给对应引脚取名字 申请gpio时需要用到名字}}else{/* pdev来自c文件 static struct resource omap16xx_gpio3_resources[] = {{.start = 115,.end = 115,.flags = IORESOURCE_IRQ,},{.start = 118,.end = 118,.flags = IORESOURCE_IRQ,}, }; */count = 0;while (1){ //获得平台设备里面的,这种IORESOURCE_IRQ类型的资源//@dev:platform_device @type:resource type @num:resource indexres = platform_get_resource(pdev, IORESOURCE_IRQ, count);if (res){count++;}else{break;}}if (!count)return -EINVAL;gpios = kmalloc(count * sizeof(struct gpio_desc), GFP_KERNEL);for (i = 0; i < count; i++){res = platform_get_resource(pdev, IORESOURCE_IRQ, i);gpios[i].gpio = res->start;//取出这个设备的第i个引脚的引脚编号sprintf(gpios[i].name, "%s_pin_%d", pdev->name, i);//给对应引脚取名字 申请gpio时需要用到名字}}for (i = 0; i < count; i++){ gpios[i].irq = gpio_to_irq(gpios[i].gpio);setup_timer(&gpios[i].key_timer, key_timer_expire, (unsigned long)&gpios[i]);//timer_setup(&gpios[i].key_timer, key_timer_expire, 0);gpios[i].key_timer.expires = ~0;add_timer(&gpios[i].key_timer);err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "100ask_gpio_key", &gpios[i]);}/* 注册file_operations */major = register_chrdev(0, "100ask_gpio_key", &gpio_key_drv); /* /dev/gpio_desc */gpio_class = class_create(THIS_MODULE, "100ask_gpio_key_class");if (IS_ERR(gpio_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_gpio_key");return PTR_ERR(gpio_class);}device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "100ask_gpio"); /* /dev/100ask_gpio */return err;
}/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
//这里应该free gpio这个数组 但是没加上不知道为啥
static int gpio_drv_remove(struct platform_device *pdev)
{int i;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);device_destroy(gpio_class, MKDEV(major, 0));class_destroy(gpio_class);unregister_chrdev(major, "100ask_gpio_key");for (i = 0; i < count; i++){free_irq(gpios[i].irq, &gpios[i]);del_timer(&gpios[i].key_timer);}return 0;
}//支持的设备
//只要设备树节点的信息它的compatible与下面的compatible相同,
//即platfrom_device和platfrom_driver匹配成功,成功后probe函数就被调用
static const struct of_device_id gpio_dt_ids[] = {{ .compatible = "100ask,gpiodemo", },{ /* sentinel */ }
};static struct platform_driver gpio_platform_driver = {.driver = {.name = "100ask_gpio_plat_drv",.of_match_table = gpio_dt_ids,},.probe = gpio_drv_probe,.remove = gpio_drv_remove,
};static int __init gpio_drv_init(void)
{/* 注册platform_driver */return platform_driver_register(&gpio_platform_driver);
}static void __exit gpio_drv_exit(void)
{/* 反注册platform_driver */platform_driver_unregister(&gpio_platform_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(gpio_drv_init);
module_exit(gpio_drv_exit);MODULE_LICENSE("GPL");相关文章:
【IMX6ULL驱动开发学习】07.驱动程序分离的思想之平台总线设备驱动模型和设备树
一、驱动程序分离的思想 【IMX6ULL驱动开发学习】05.字符设备驱动开发模板(包括读写函数、poll机制、异步通知、定时器、中断、自动创建设备节点和环形缓冲区)_阿龙还在写代码的博客-CSDN博客 之前编写驱动程序的代码存在不少弊端:移植性差…...

深度学习中的python语法笔记总结
解释 torch中的 .clamp(min0) 在PyTorch中,torch.clamp将张量中的元素限制在指定的范围内。 torch.clamp(min0)会将张量中的每个元素与0进行比较,并将小于0的元素替换为0。其他大于等于0的元素则保持不变。 clamp函数原理 def clamp(x, lower, upper)…...
Reids 的整合使用
大家好 , 我是苏麟 , 今天带来强大的Redis . REmote DIctionary Server(Redis) 是一个由 Salvatore Sanfilippo 写的 key-value 存储系统,是跨平台的非关系型数据库。 Redis 是一个开源的使用 ANSI C 语言编写、遵守 BSD 协议、支持网络、可基于内存、分布式、可选…...

Vue3 —— watchEffect 高级侦听器
该文章是在学习 小满vue3 课程的随堂记录示例均采用 <script setup>,且包含 typescript 的基础用法 前言 Vue3 中新增了一种特殊的监听器 watchEffect,它的类型是: function watchEffect(effect: (onCleanup: OnCleanup) > void,o…...

Java异步子线程读取主线程参数的若干好玩场景
在开发过程中,我们难免会因为性能、实时响应等,需要异步处理的一些事务,并且在子线程中有时我们还需要获取主线程相关的参数。下面有若干方案可以实现上述场景,但会出现一定的问题。 场景1-基础场景 在主线程中开启子线程&#x…...

Android 视频开发
在 Android 平台上进行视频开发,您需要掌握以下关键知识点,以确保能够成功地开发和调试视频应用程序: Android视频架构: 了解 Android 的视频系统架构,包括视频捕获、编码、解码、渲染和显示等。 视频格式和编解码&am…...
【计算机网络篇】UDP协议
✅作者简介:大家好,我是小杨 📃个人主页:「小杨」的csdn博客 🐳希望大家多多支持🥰一起进步呀! UDP协议 1,UDP 简介 UDP(User Datagram Protocol)是一种无连…...

LeetCode 2682. 找出转圈游戏输家
【LetMeFly】2682.找出转圈游戏输家 力扣题目链接:https://leetcode.cn/problems/find-the-losers-of-the-circular-game/ n 个朋友在玩游戏。这些朋友坐成一个圈,按 顺时针方向 从 1 到 n 编号。从第 i 个朋友的位置开始顺时针移动 1 步会到达第 (i …...
数据结构单链表
单链表 1 链表的概念及结构 概念:链表是一种物理存储结构上非连续、非顺序的存储结构,数据元素的逻辑顺序是通过链表中的指针链 接次序实现的 。 在我们开始讲链表之前,我们是写了顺序表,顺序表就是类似一个数组的东西࿰…...
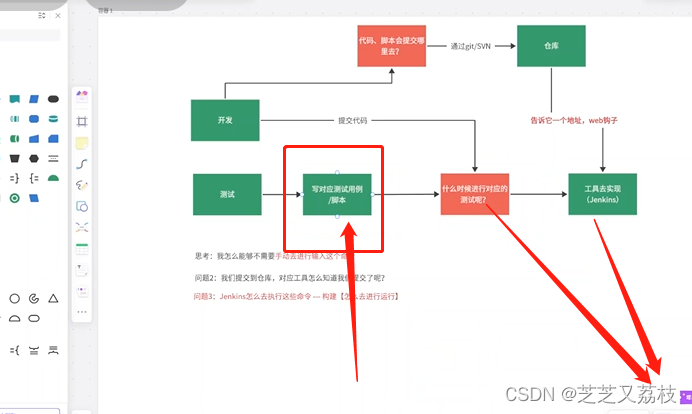
自定义WEB框架结合Jenkins实现全自动测试
自定义WEB框架结合Jenkins实现全自动测试 allure生成 allure生成 1.allure–纯命令运行 -固定的–稍微记住对应的单词即可。2 安装,2个步骤: 1.下载allure包,然后配置环境变量。 https://github.com/allure-framework/allure2/releases/tag/2.22.4 2.在…...

PHP加密与安全的最佳实践
PHP加密与安全的最佳实践 概述 在当今信息时代,数据安全是非常重要的。对于开发人员而言,掌握加密和安全的最佳实践是必不可少的。PHP作为一种常用的后端开发语言,提供了许多功能强大且易于使用的加密和安全性相关函数和类。本文将介绍一些P…...
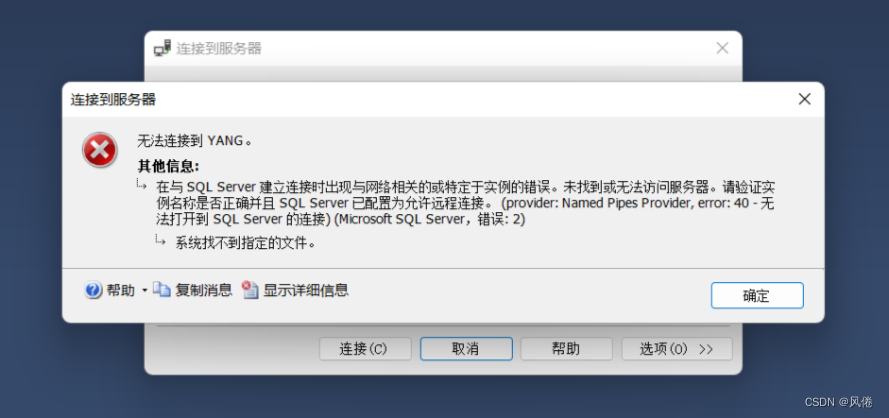
SQL Server数据库无法连接
问题如下: 原因:sql server服务器未开启 解决方法:以管理员身份打开cmd,输入:net start mssqlserver。...
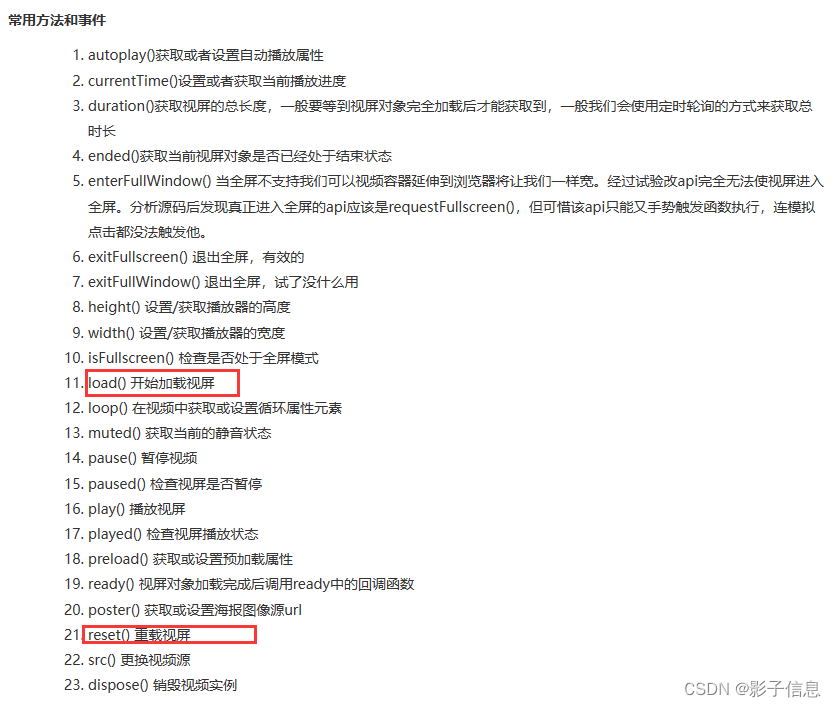
videojs 播放视频
背景:在项目中使用第三方插件videojs进行播放视频,点击事件更改播放的数据源。 一、视频相关理论 (一)、背景 网络流媒体的呈现形式分为两种:直播点播 (二)、流媒体的3种协议 分类:HTTPHLSRTMP定义:基于HTTP的流媒体…...

vue强制刷新变量
在前端开发中,我们经常需要变量的值实时响应到界面上。Vue就是一个非常强大的前端框架,它的数据绑定能够非常好地实现变量与界面的同步更新。但是有时候,我们需要强制刷新某个变量的值,以便界面能及时地反映出它的变化。本文将介绍…...

[QCA6174]QCA6174 5G WiFi DFS处理逻辑分析及雷达误检率高优化规避
DFS认证信息 WIFI DFS测试要求 Master设备需要测试的项目 4.6.2.1 Channel Availability Check 信道可用性检查 定义其作为雷达脉冲检测机制,当雷达脉冲出现时所占用的信道需要能被设备检测到已经被占用。当相关信道未被占用时,这些信道被称为Avaliable Channel可用信道 …...

预防SQL漏洞注入和规避网络攻击
前言: 虽然近些年SQL注入已经被各类的安全开发框架规避了绝大部分,但SQL注入作为一种最原始的攻击手段之一,破坏力仍然十分强大,因为它直捣黄龙数据中心。所以未雨绸缪,各位不可不重视。 预防SQL注入方法措施: 服务器…...
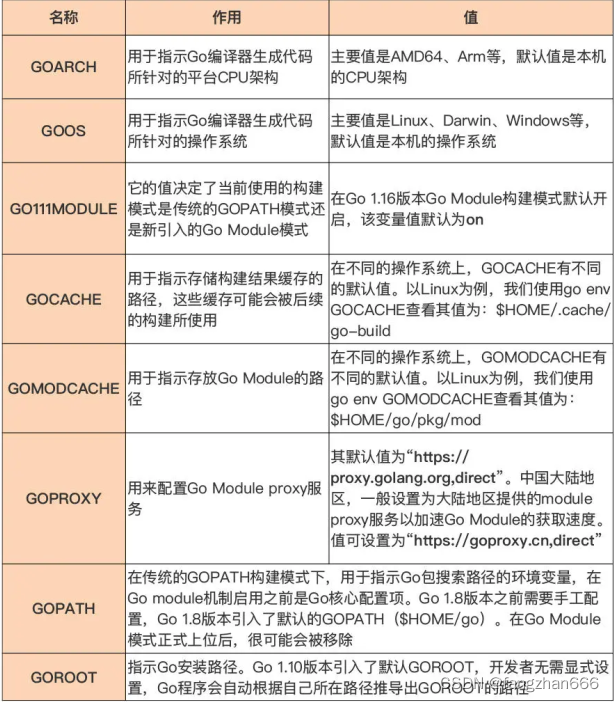
《Go 语言第一课》课程学习笔记(一)
配好环境:选择一种最适合你的 Go 安装方法 选择 Go 版本 一般情况下,建议采用最新版本。因为 Go 团队发布的 Go 语言稳定版本的平均质量一直是很高的,少有影响使用的重大 bug。可以根据不同实际项目需要或开源社区的情况使用不同的版本。 有…...
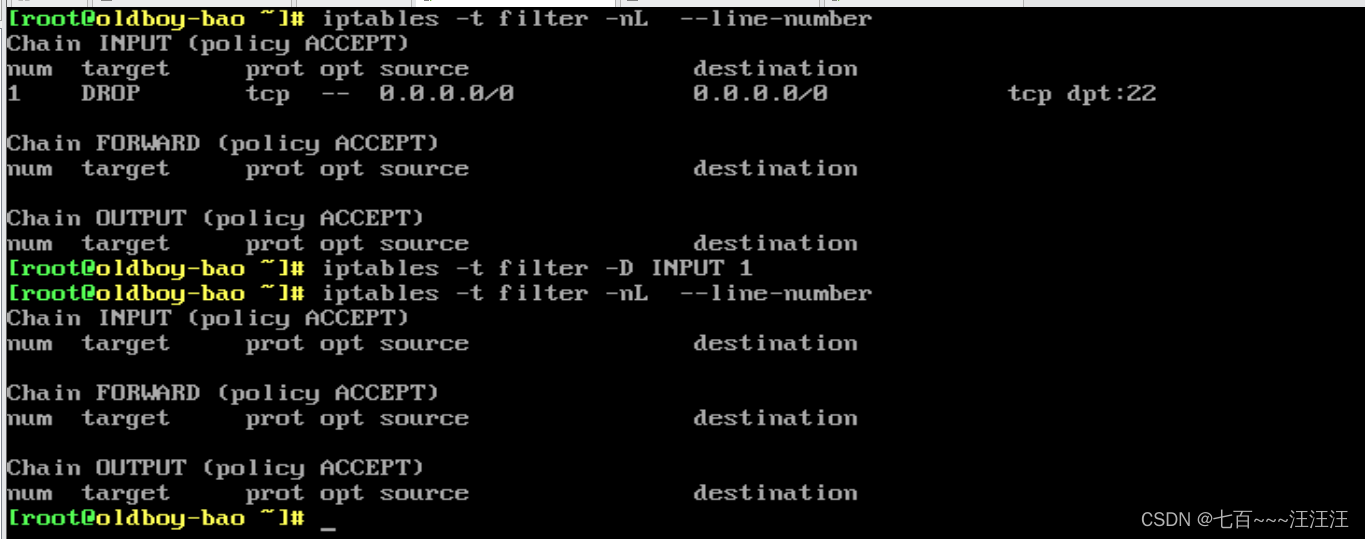
网络安全 Day29-运维安全项目-iptables防火墙
iptables防火墙 1. 防火墙概述2. 防火墙2.1 防火墙种类及使用说明2.2 必须熟悉的名词2.3 iptables 执行过程※※※※※2.4 表与链※※※※※2.4.1 简介2.4.2 每个表说明2.4.2.1 filter表 :star::star::star::star::star:2.4.2.2 nat表 2.5 环境准备及命令2.6 案例01:…...

SQL 复习 03
函数与关键字 用法说明round(x, n)四舍五入,x为浮点数,n为保留的位数ceil(x)向上取整floor(x)向下取整truncate(x, n)截断x,n为保留的位,该位之后的数值置零,位数表示示例:321.123,其中小数点前…...

出现 sudo: docker: command not found 的解决方法
目录 1. 问题所示2. 原理分析3. 解决方法3.1 未成功安装引起3.2 环境变量引起1. 问题所示 安装了docker,但是执行docker命令的时候,提示该问题: ubuntu@10-41-104-1:~$ sudo docker ps -a sudo: docker: command not foundubuntu@10-41-104-1:~$ sudo apt-get install doc…...

3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐
3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 还在使用功能单一的网易云音乐吗?想不想让你的播放器拥…...

告别拍脑袋规划!用ArcGIS做绿道选线:如何科学量化坡度、水域、道路成本并加权计算
科学规划绿道的ArcGIS高阶技法:从成本栅格构建到最优路径生成绿道规划从来不是简单的"两点之间直线最短",而是需要综合考虑地形、生态、人文等多维因素的复杂决策过程。传统规划中常见的"拍脑袋"决策方式,往往导致建成后…...

Onekey终极指南:如何5分钟快速获取Steam游戏清单的免费神器
Onekey终极指南:如何5分钟快速获取Steam游戏清单的免费神器 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey 还在为复杂的Steam游戏清单下载而头疼吗?想要备份游戏资源却不…...

AI算力要上天?别笑,太空数据中心真能干翻地球电费!
前言你有没有算过,训练一个大模型,相当于烧掉多少吨煤?如今AI狂飙突进,算力需求指数级增长,可地球上的电——不够用了!更别说建个数据中心还得跟地方政府“斗智斗勇”,抢地皮、配储能、扛审批&a…...

3大实战秘籍:揭秘raylib如何让游戏开发像搭积木一样简单
3大实战秘籍:揭秘raylib如何让游戏开发像搭积木一样简单 【免费下载链接】raylib A simple and easy-to-use library to enjoy videogames programming 项目地址: https://gitcode.com/GitHub_Trending/ra/raylib 你是否曾经被复杂的游戏引擎配置搞得焦头烂额…...

基于MAX78000的医疗紧急呼叫系统:边缘AI与低功耗设计实战
1. 项目概述与核心价值大家好,我是Victor Hugo,一名电子工程师。今天我想和大家分享一个我最近完成并参与设计竞赛的项目:一个基于MAX78000 FTHR开发板的医疗紧急呼叫辅助系统。这个项目的核心,不是从零开始造一个新轮子ÿ…...

Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题
Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款完全免费开源的…...

武汉国电华美串联谐振试验装置,现场用着心里有底
在高压试验现场干了这么多年,这位老师傅常说,一台好的串联谐振装置,就是试验人员的胆。面对GIS、大型变压器、超高压电缆这些大电容试品,没有趁手的谐振设备,交流耐压试验根本没法干。16875kVA/225kV这个规格ÿ…...

从零构建FOC轮腿机器人:开源平衡机器人完整指南
从零构建FOC轮腿机器人:开源平衡机器人完整指南 【免费下载链接】foc-wheel-legged-robot Open source materials for a novel structured legged robot, including mechanical design, electronic design, algorithm simulation, and software development. | 一个…...

Driver Store Explorer终极指南:轻松管理Windows驱动存储区,释放宝贵磁盘空间
Driver Store Explorer终极指南:轻松管理Windows驱动存储区,释放宝贵磁盘空间 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer 你是否曾为Windows系统越来越慢而烦…...