ARM DIY 硬件调试
前言
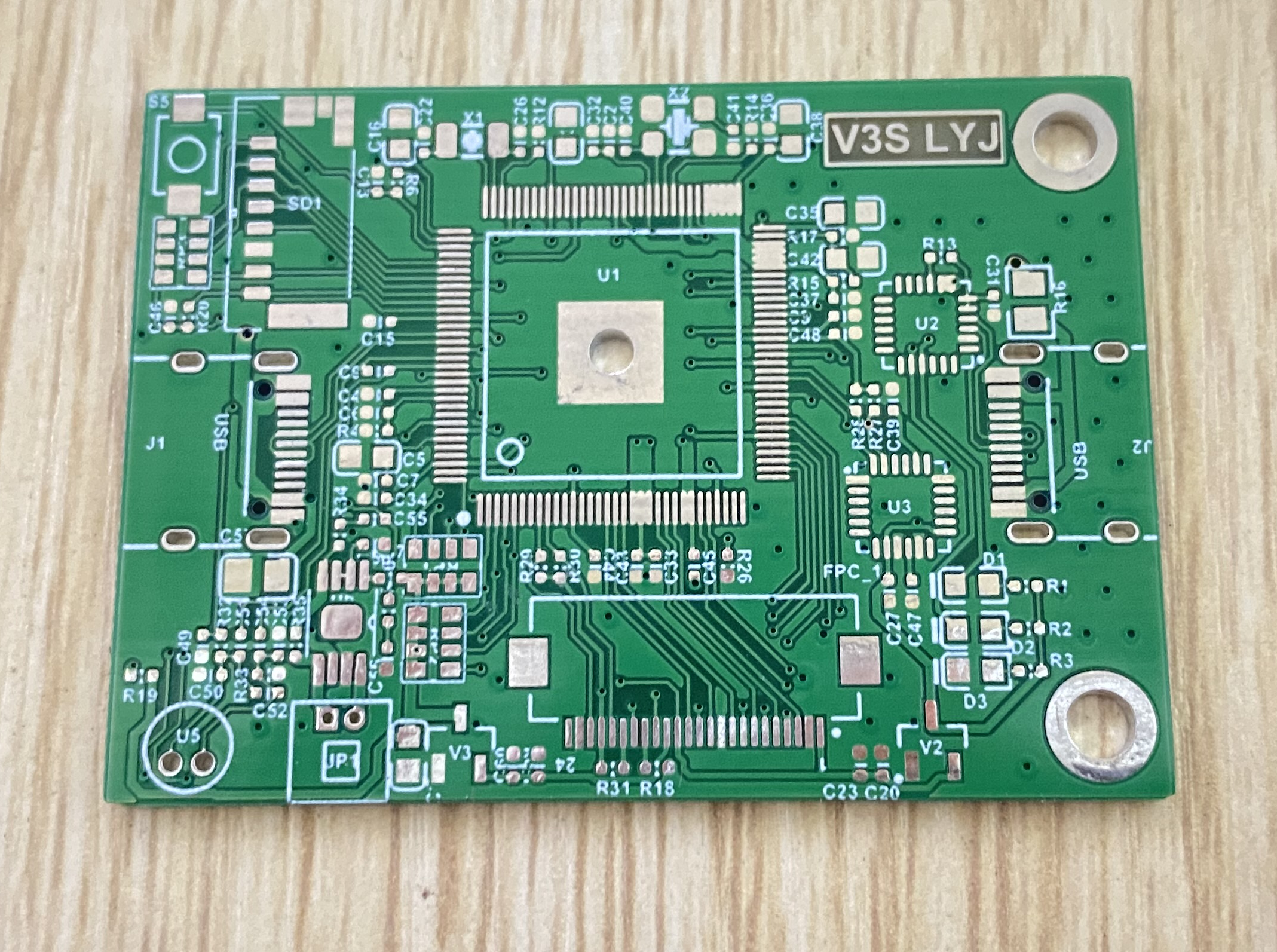
之前打样的几块 ARM 板,一直放着没去焊接。今天再次看到,决定把它焊起来。
加热台焊接
为了提高焊接效率,先使用加热台焊接。不过板子为双面贴片,使用加热台只能焊接一面,那就优先焊主芯片那面,并把 Type C、SD 卡座还有一些关键电阻电容一并焊接。
(不过后来发现这个决定是错误的,主芯片 SOC 虽然引脚多,但是它是 LQFP 封装的,至少引脚漏在外面,好焊接,好排查问题。
而电源芯片 EA3036 是 QFN 封装的,并且器件非常小,难以焊接,更难的是排查问题,因为下不去万用表表笔,无法测量焊接好坏。)
主芯片引脚有不少连锡,尝试使用电烙铁拖锡把多余的锡粘走,没能成功,最后使用吸锡带将多余锡粘走,并检查相邻引脚有无短路。

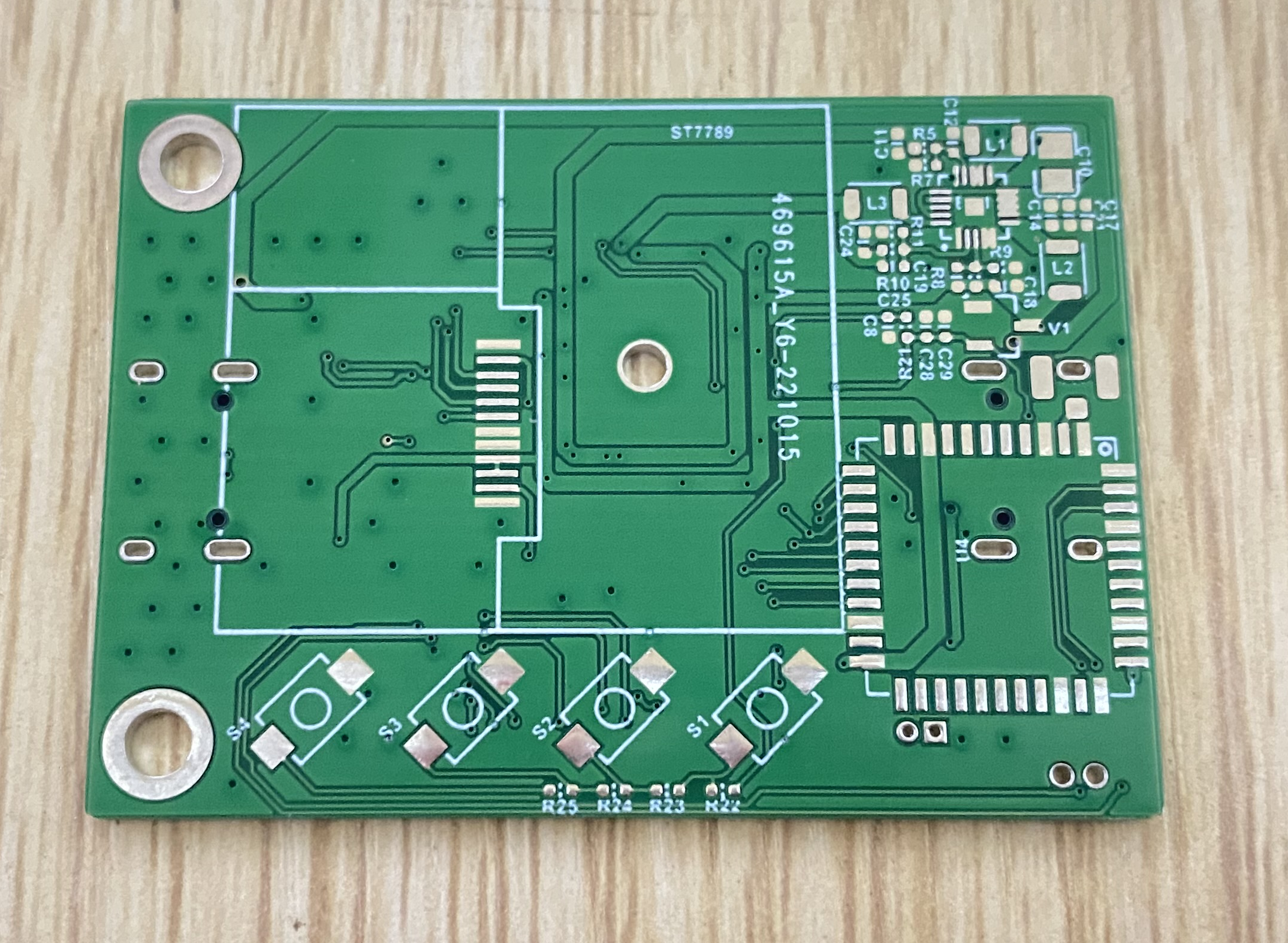
热风枪吹焊
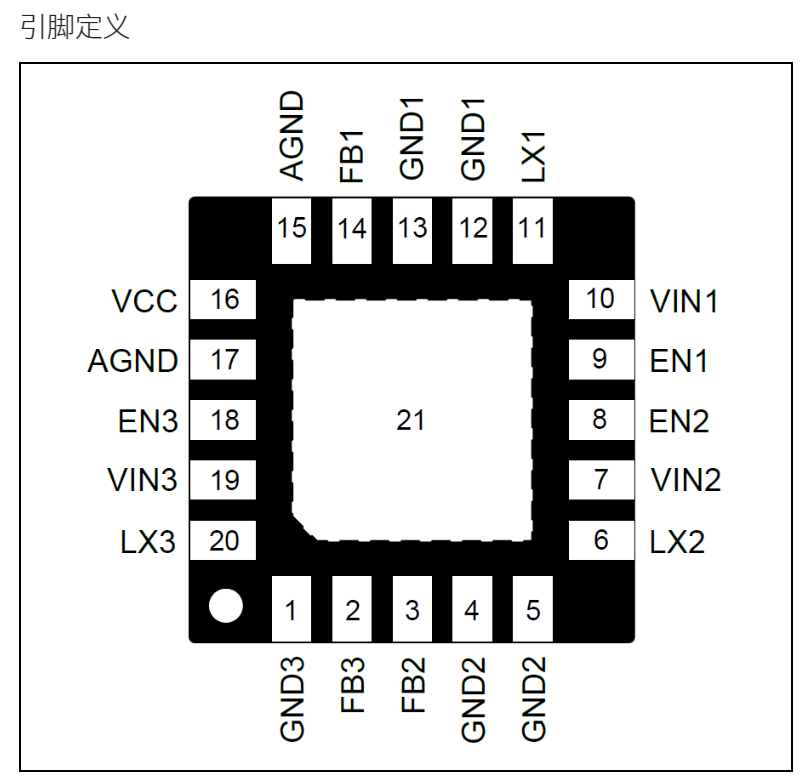
背面只能使用热风枪吹焊,电源芯片是 QFN 封装的,加之这颗芯片尺寸比较小,另外底部接地的焊盘封装画的不好,不是位于正中央,导致吹焊时始终无法让芯片自动归位。焊好电源芯片后,再焊接其三路输入(5V,来自 Type C)和三路输出电路(3.3V、1.8V、1.2V)。使用万用表测量,输入正常,三路输出均无电压。。。后面再详细说如何调试

电烙铁补焊
一些遗漏的电阻电容再使用电烙铁补焊
电源调试
一开始还幻想着上电直接点亮,后来发现我想多了,到这里才算刚刚开始。
先用万用表测试电源输入输出,输入是好的,5V。但是三路输出均无电压。
猜测是电源芯片没焊好,用万用表艰难地测量芯片周围引脚电压,并查看 datasheet,发现引脚电压不对。
只能吹了再焊,量电压,还是不对。就这样反复吹了焊,焊了吹,经过十几次的不断尝试,终于三路电压都正常了。
SD 卡座调试
发现 SD 卡座漏焊了几颗上拉电阻

DRAM 电路调试
V3S 内部集成了 DRAM,不过需要外部供电才能正常工作,这里也将配套的几颗电阻电容焊上
串口电路调试
为了简化问题排查,就没焊接板子上的 CP2102,直接将 SOC 的 TX、RX 接到串口线上测试,但是串口始终不打印信息。
后来又怕是串口焊接不稳定,就将板子上的 3 颗 LED 给焊上,其中一颗是电源指示灯,另外两颗是 TX、RX 数据指示灯,如果串口有数据,灯就会闪烁,这样会比使用串口线更简单稳定点。
不过,一样,上电后只有电源指示灯亮,TX、RX 指示灯不闪烁

SOC 调试
对照原理图,把 SOC 引脚的电压都量了一遍,没发现问题。
最后将板子翻过来,发现 SOC 底部中央还有一个焊盘(接地),竟然把这个焊盘给漏掉了,幸好 PCB 设计时这里是留孔的,不然想补救也没办法了
将这个中央焊盘焊接后,上电,TX 灯闪烁了,板子终于起来了,激动!!!
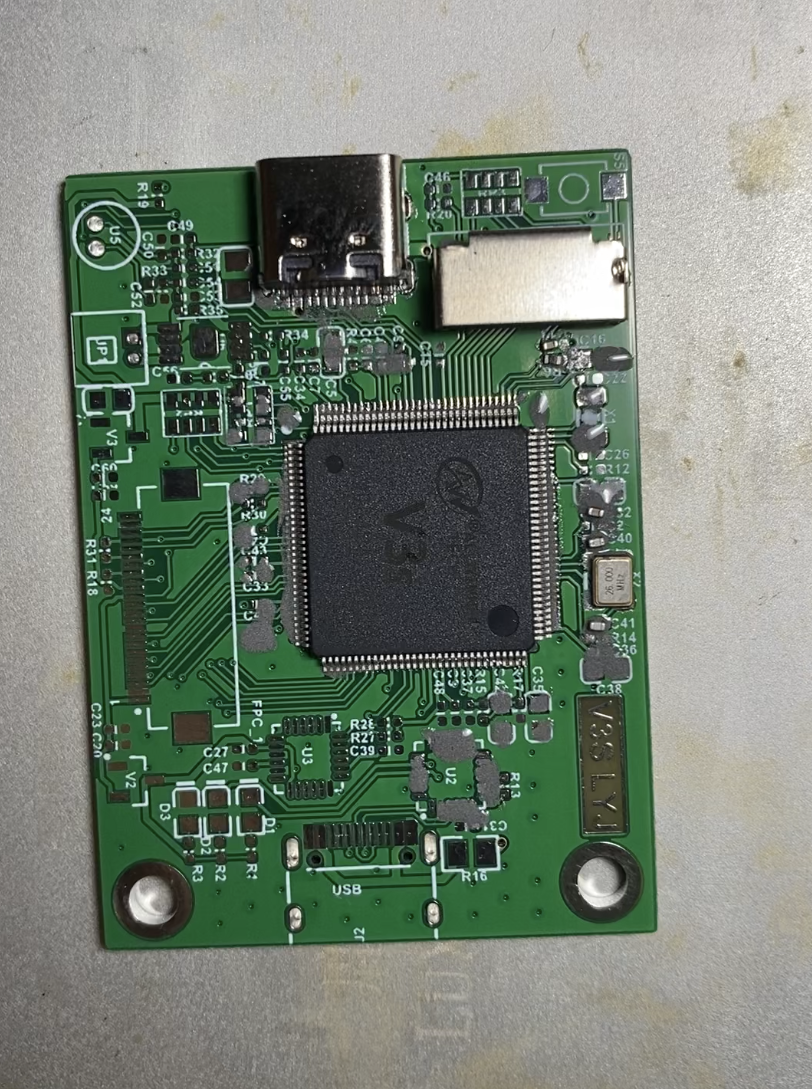
成品
洗板水洗一下

上电,电源指示灯亮(最下面),串口 TX 指示灯闪烁(中间),说明系统已运行。
相关文章:
ARM DIY 硬件调试
前言 之前打样的几块 ARM 板,一直放着没去焊接。今天再次看到,决定把它焊起来。 加热台焊接 为了提高焊接效率,先使用加热台焊接。不过板子为双面贴片,使用加热台只能焊接一面,那就优先焊主芯片那面,并…...
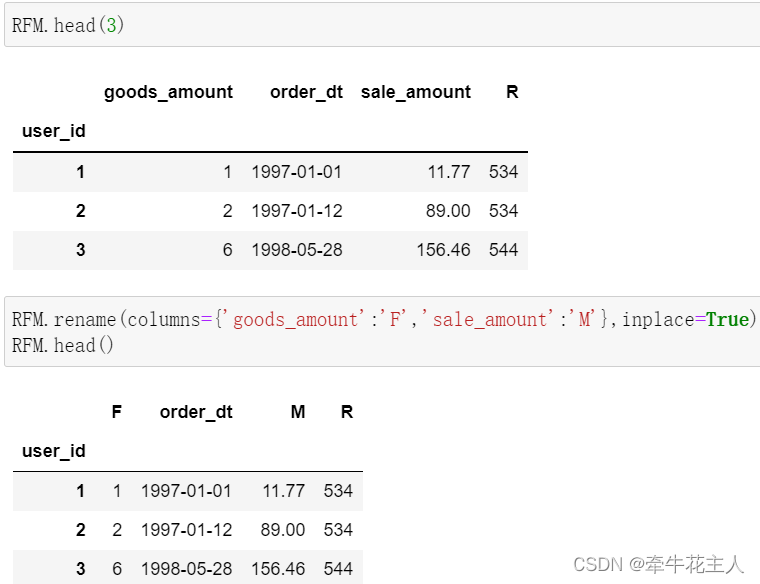
DataFrame.rename()函数--Pandas
1. 函数作用 修改DataFrame的行名、列名 2. 函数语法 DataFrame.rename(mapperNone, *, indexNone, columnsNone, axisNone, copyNone, inplaceFalse, levelNone, errorsignore)3. 函数参数 参数含义mapper与axis结合使用,表示运用到axis上的值:类字…...
09- DMA(DirectMemoryAccess直接存储器访问)
DMA 09 、DMA(DirectMemoryAccess直接存储器访问)DMA配置流程 09 、DMA(DirectMemoryAccess直接存储器访问) DMA配置流程 dma.c文件 main.c文件 详见《stm32中文参考手册》表57。...
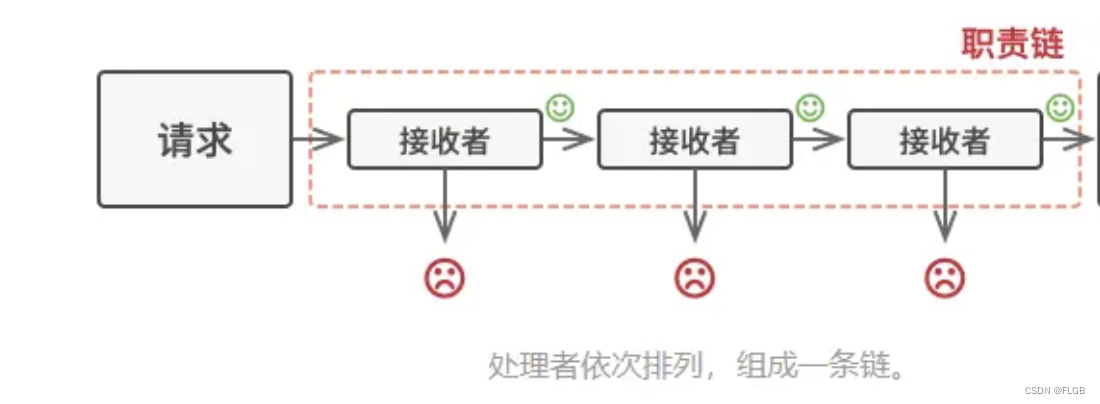
责任链模式
责任链模式 责任链模式(Chain of Responsibility Pattern)是一种行为型设计模式,它用于将请求的发送者和接收者解耦,使多个对象都有机会处理请求。这种模式建立在一个处理对象的链上,每个处理对象都可以选择处理请求或…...

【BI看板】Docker-compose安装Superset,安装最新版本2.1.0
软件及环境准备 docker, docker-compose docker-compose安装 字节码安装 #wget https://github.com/docker/compose/releases/download/v2.5.0/docker-compose-linux-x86_64 #mv docker-compose-linux-x86_64 docker-compose #chmod x /usr/local/bin/docker-com…...

VS2019生成的DLL,给QT(MinGW版本)使用的小结
VS2019端: a 基于生成一个DLL的工程(要注意生成是x86,还是x64的,需要和后面的QT的App工程对应),这里不多解释了,网上多的是; b 在cpp实现文件里,假如要导出一个这样的…...
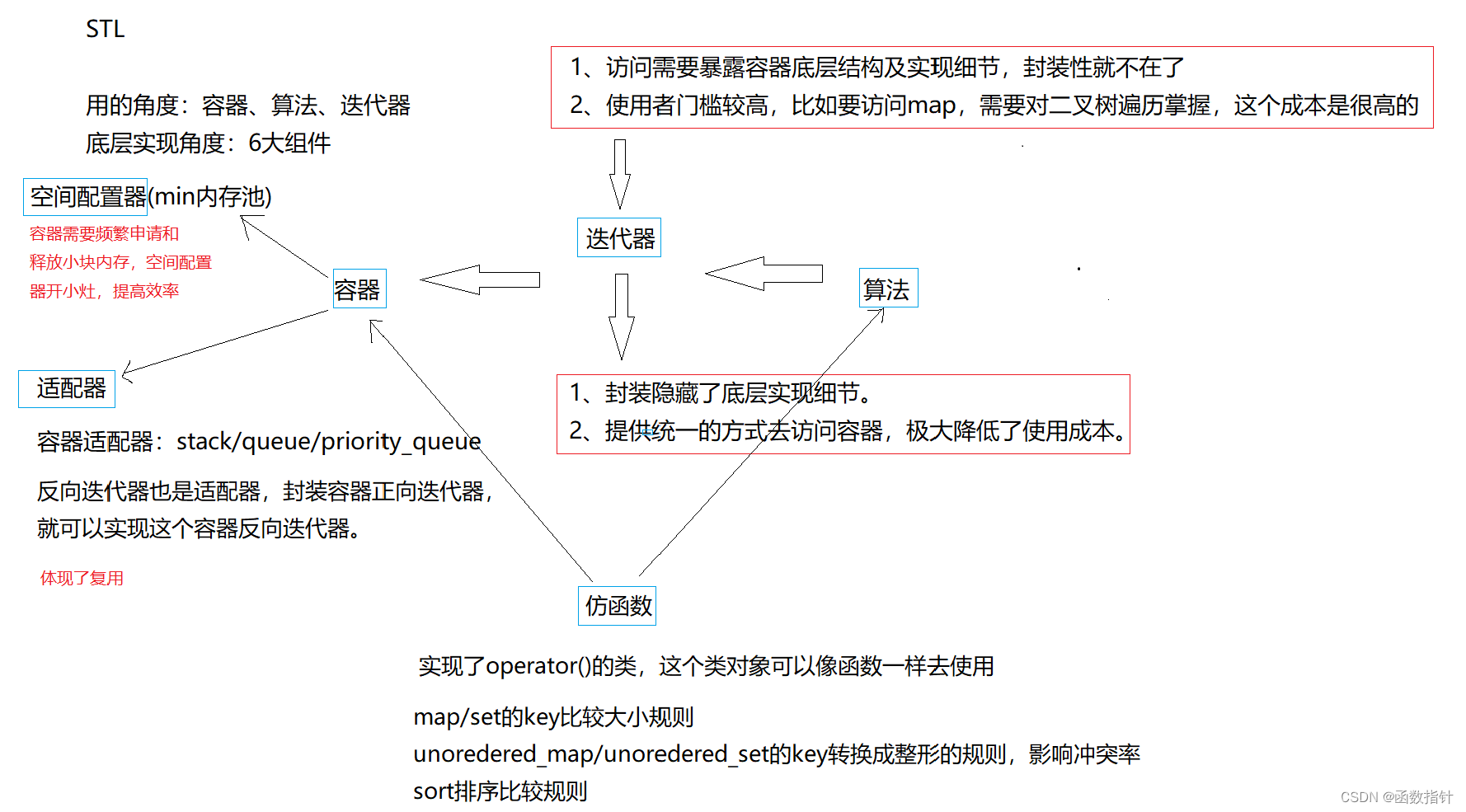
c++--SLT六大组件之间的关系
1.SLT六大组件: 容器,迭代器,算法,仿函数,适配器,空间配置器 2.六大组件之间的关系 容器:容器是STL最基础的组件,没有容器,就没有数据,容器的作用就是用来存…...
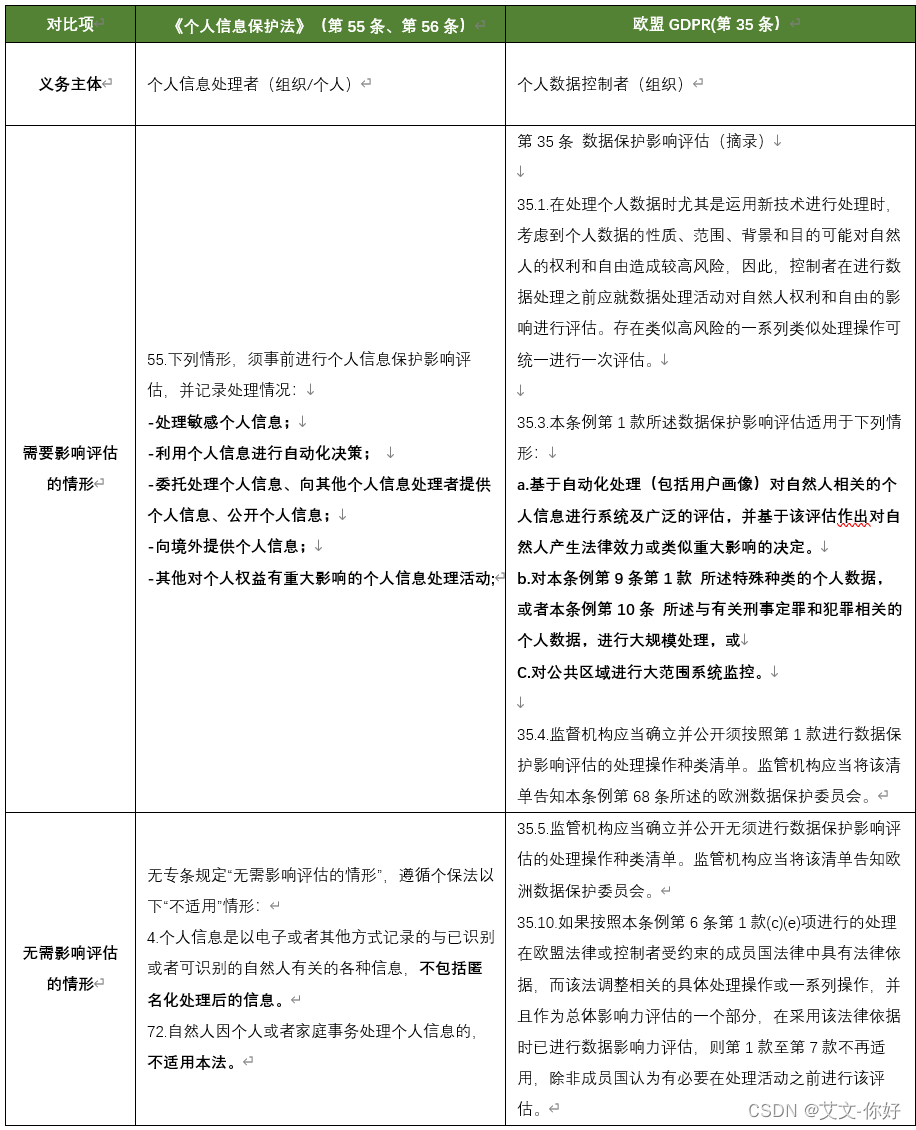
解析个人信息保护影响评估
一、个人信息保护影响评估的概念及范围(What) 什么是“个人信息保护影响评估”?如何理解?“个人信息保护影响评估”的概念未在我国高位阶的法律规定中明确,其历经从观念到实践的演变,逐渐形成业界普遍认可…...

2.阿里云对象存储OSS
1.对象存储概述 文件上传,是指将本地图片、视频、音频等文件上传到服务器上,可以供其他用户浏览或下载的过程。文件上传在项目中应用非常广泛,我们经常发抖音、发朋友圈都用到了文件上传功能。 实现文件上传服务,需要有存储的支持…...

(三)Unity开发Vision Pro——入门
3.入门 1.入门 本节涵盖了几个重要主题,可帮助您加快visionOS 平台开发速度。在这里,您将找到构建第一个 Unity PolySpatial XR 应用程序的分步指南的链接,以及 PolySpatial XR 开发时的一些开发最佳实践。 2.开发与迭代 有关先决条件、开…...

召集令:CloudQuery 社区有奖征文活动来啦!
CloudQuery 社区第一期征文活动来袭!!!只要你对 CloudQuery 产品感兴趣,或者是希望了解 CQ ,都可以来参加,在本期活动中,我们也为大家准备了多种主题供你选择,CQ 使用案例、版本对比…...
【傅里叶级数与傅里叶变换】数学推导——1、基础知识点回顾及[Part1:三角函数的正交性]介绍
文章内容来自DR_CAN关于傅里叶变换的视频,本篇文章提供了一些基础知识点,比如三角函数常用的导数、三角函数换算公式等。 文章全部链接: 基础知识点 Part1:三角函数系的正交性 Part2:T2π的周期函数的傅里叶级数展开 P…...
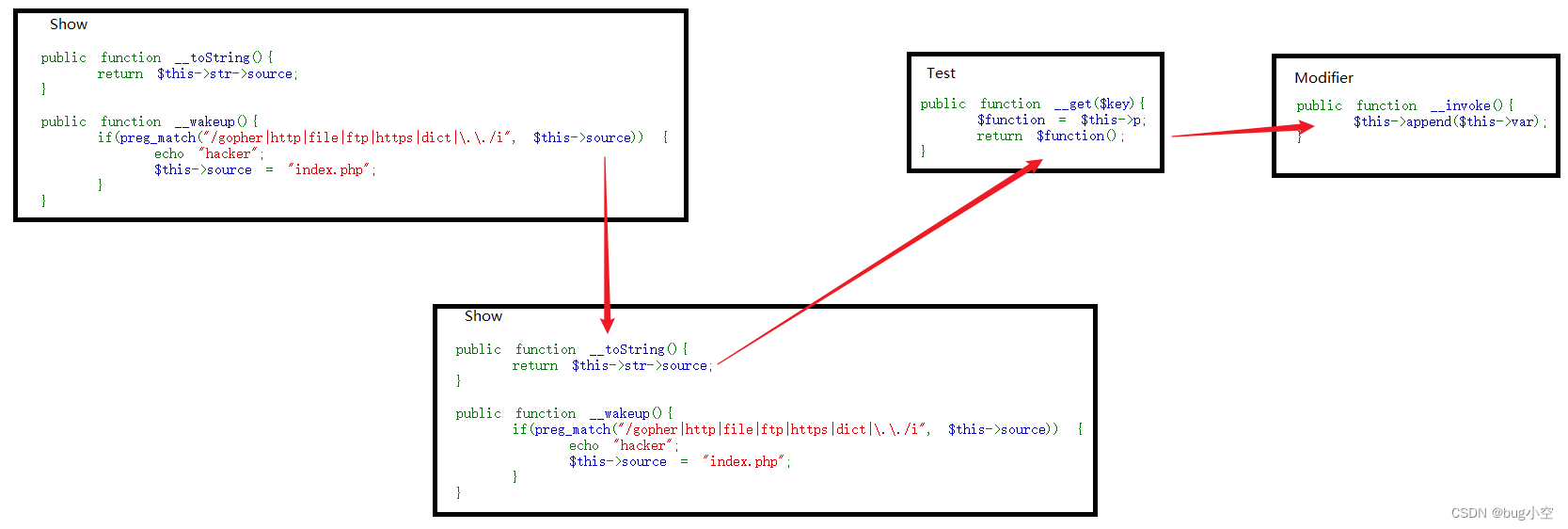
BUUCTF [MRCTF2020]Ezpop解题思路
题目代码 Welcome to index.php <?php //flag is in flag.php //WTF IS THIS? //Learn From https://ctf.ieki.xyz/library/php.html#%E5%8F%8D%E5%BA%8F%E5%88%97%E5%8C%96%E9%AD%94%E6%9C%AF%E6%96%B9%E6%B3%95 //And Crack It! class Modifier {protected $var;publi…...
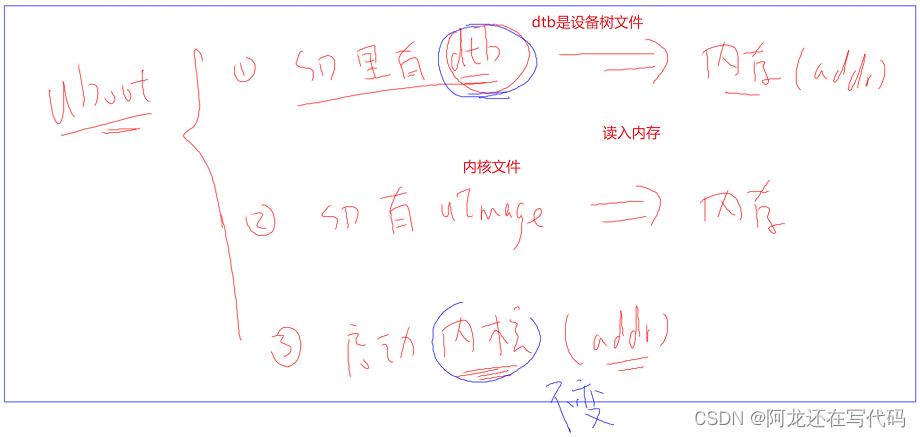
【IMX6ULL驱动开发学习】07.驱动程序分离的思想之平台总线设备驱动模型和设备树
一、驱动程序分离的思想 【IMX6ULL驱动开发学习】05.字符设备驱动开发模板(包括读写函数、poll机制、异步通知、定时器、中断、自动创建设备节点和环形缓冲区)_阿龙还在写代码的博客-CSDN博客 之前编写驱动程序的代码存在不少弊端:移植性差…...

深度学习中的python语法笔记总结
解释 torch中的 .clamp(min0) 在PyTorch中,torch.clamp将张量中的元素限制在指定的范围内。 torch.clamp(min0)会将张量中的每个元素与0进行比较,并将小于0的元素替换为0。其他大于等于0的元素则保持不变。 clamp函数原理 def clamp(x, lower, upper)…...
Reids 的整合使用
大家好 , 我是苏麟 , 今天带来强大的Redis . REmote DIctionary Server(Redis) 是一个由 Salvatore Sanfilippo 写的 key-value 存储系统,是跨平台的非关系型数据库。 Redis 是一个开源的使用 ANSI C 语言编写、遵守 BSD 协议、支持网络、可基于内存、分布式、可选…...

Vue3 —— watchEffect 高级侦听器
该文章是在学习 小满vue3 课程的随堂记录示例均采用 <script setup>,且包含 typescript 的基础用法 前言 Vue3 中新增了一种特殊的监听器 watchEffect,它的类型是: function watchEffect(effect: (onCleanup: OnCleanup) > void,o…...

Java异步子线程读取主线程参数的若干好玩场景
在开发过程中,我们难免会因为性能、实时响应等,需要异步处理的一些事务,并且在子线程中有时我们还需要获取主线程相关的参数。下面有若干方案可以实现上述场景,但会出现一定的问题。 场景1-基础场景 在主线程中开启子线程&#x…...

Android 视频开发
在 Android 平台上进行视频开发,您需要掌握以下关键知识点,以确保能够成功地开发和调试视频应用程序: Android视频架构: 了解 Android 的视频系统架构,包括视频捕获、编码、解码、渲染和显示等。 视频格式和编解码&am…...
【计算机网络篇】UDP协议
✅作者简介:大家好,我是小杨 📃个人主页:「小杨」的csdn博客 🐳希望大家多多支持🥰一起进步呀! UDP协议 1,UDP 简介 UDP(User Datagram Protocol)是一种无连…...

Unity-MCP协议:可嵌入、可协商的AI上下文通信标准
1. 这不是又一个“AI插件”,而是Unity开发工作流的底层重定义你有没有过这样的时刻:在Unity里反复调整Animator Controller的过渡条件,只为让角色转身动画不穿模;写完一段NavMesh寻路逻辑,却要花两小时调试Agent卡在斜…...

Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南
Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南 【免费下载链接】Qwen3-Coder-30B-A3B-Instruct-FP8 项目地址: https://ai.gitcode.com/hf_mirrors/Qwen/Qwen3-Coder-30B-A3B-Instruct-FP8 在当今AI代码生成领域,Qwen3-Coder-30B-…...

身份证OCR识别接口接入实战:Python/Java/PHP/C#四语言代码示例与踩坑指南
#身份证OCR, #OCR接口, #API接入, #Python示例, #Java示例, #PHP示例, #踩坑指南, #石榴智能, #实名认证, #图片识别 身份证OCR识别接口接入实战:Python/Java/PHP/C#四语言代码示例与踩坑指南 作者:石榴智能技术团队 一、前言 身份证OCR识别已经不是什…...

Taurus多执行器对比实战:JMeter/Gatling/Locust统一压测方案
1. 为什么选Taurus做多执行器对比——不是为了炫技,而是为了少踩坑在性能测试领域,我见过太多团队卡在“选型”这一步:刚招来一个会写JMeter脚本的工程师,项目突然要压测WebSocket接口,发现JMeter原生支持弱、插件维护…...

基于Arduino的模块化DIY智能时钟:从RTC到RGB LED的完整实现
1. 项目概述:打造一台高度可定制的DIY RGB LED时钟如果你和我一样,对市面上千篇一律的电子钟感到审美疲劳,同时又对Arduino和电子DIY充满热情,那么这个项目可能就是为你准备的。我们不是在简单地组装一个套件,而是在亲…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

【DeepSeek架构评审功能深度解密】:20年架构师亲授3大避坑指南与5步落地 checklist
更多请点击: https://kaifayun.com 第一章:DeepSeek架构评审功能全景概览 DeepSeek架构评审功能是一套面向大模型系统设计与工程落地的自动化分析框架,聚焦于模型结构合理性、计算图优化潜力、内存访问模式、算子兼容性及部署约束等多维度评…...

企业内统一API网关与Taotoken聚合平台对接方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内统一API网关与Taotoken聚合平台对接方案 在推进AI应用落地的过程中,许多中大型企业面临一个共同挑战:…...
)
Unity/Unreal开发者必看:用手机和陀螺仪实验,5分钟搞懂万向节死锁(附避坑指南)
Unity/Unreal开发者实战指南:用手机陀螺仪5分钟破解万向节死锁当你调试第一人称视角时,角色突然卡在墙面无法转动;当无人机模型在俯冲90度时失控乱转——这些很可能都是万向节死锁(Gimbal Lock)在作祟。作为实时3D开发中最恼人的数学陷阱之一…...

天文时序数据分析:机器学习评估、半监督学习与无监督方法实战
1. 项目概述:当机器学习遇见星空 处理海量的天文时序数据,比如来自Kepler、TESS这些“巡天巨眼”的光变曲线,早已不是靠人眼一张张图去翻的时代了。数据量太大,噪声复杂,信号微弱,传统方法常常力不从心。这…...