STM32 cubemx CAN
接收用到的结构体如下:CAN概念:
全称Controller Area Network,是一种半双工,异步通讯。
物理层:
闭环:允许总线最长40m,最高速1Mbps,规定总线两端各有一个120Ω电阻,闭环
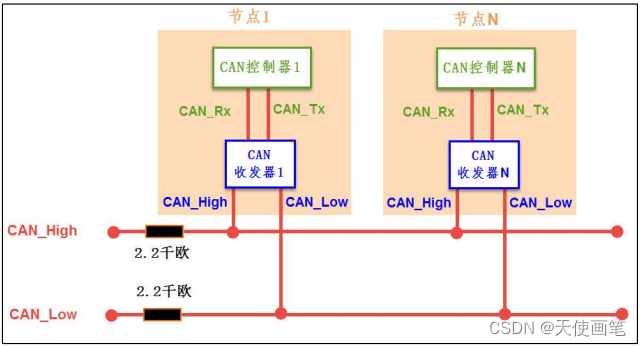
开环:最大传输距离1Km,最高速125Kbps,规定每根线串联一个2.2kΩ的电阻,开环
CAN协议基本特点
基本特点如下:
可多主控制: 当CAN总线空闲时,所有在总线上的终端都可以发送报文,根据标识符(CAN ID)决定优先级,当总线上有两个以上的终端发送消息时,对各消息CAN ID的每个位进行逐个仲裁比较。CAN ID值越低,报文优先级越高速度快,距离远:CAN 协议最快可达1Mbps(距离小于40m),最远可达10KM(速率小于 5Kbps)
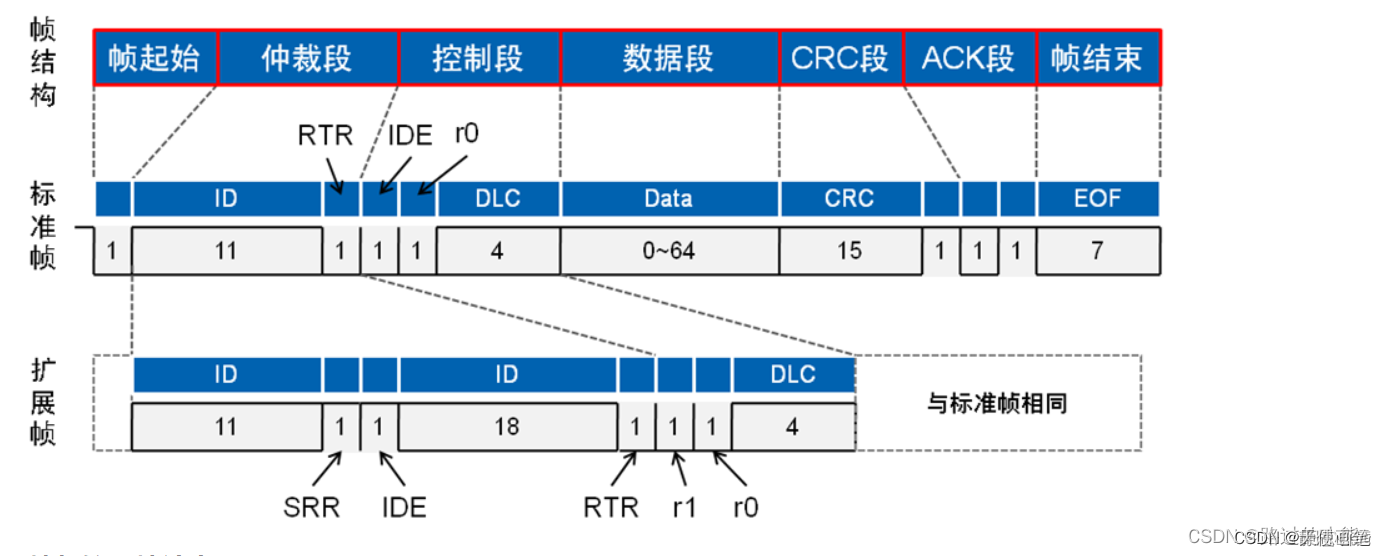
CAN 帧种类:CAN 通信中包含五种帧种类,数据帧、遥控帧、错误帧、过载帧、间隔帧。其中最重要的是数据帧,用于通讯节点向外传送数据。数据帧中有数据段,用于承载数据的内容,一帧可发送0~8个字节的数据,MSB先行。
简单了解上述基本特点即可快速上手CAN总线的配置。
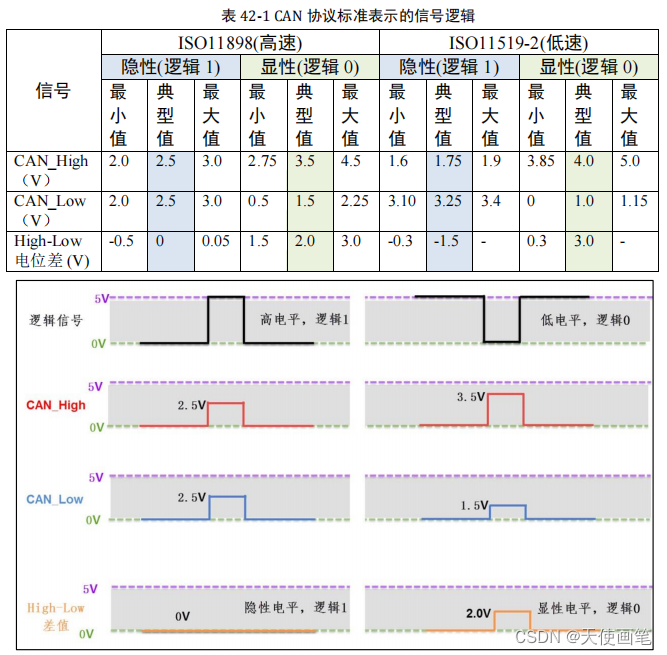
显性电平对应“0”,隐性电平对应“1”。隐性电平(1)两条线电压都是2.5V,即压差为0;显性电平(0)CAN_High和CAN_Low分别为3.5V和1.5V,压差为2V。
总线上,只要有一个节点输出显性,则总线上为显性电平;只有所有节点都是隐性电平,总线才为隐性电平
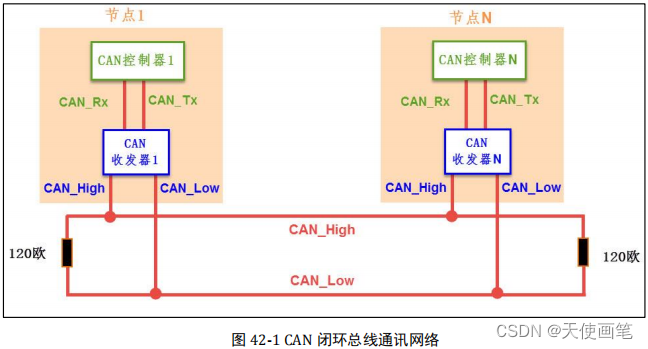
CAN网络由CAN控制器和CAN收发器组成,STM32仅集成了CAN控制器。
1、硬件-芯片使用:STM32F103Cx系列

cubeMX配置时钟
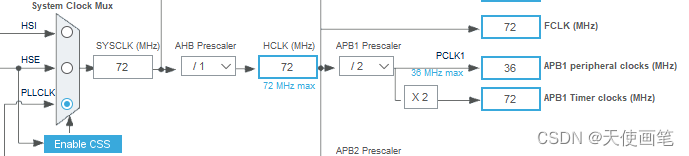
can外设挂载在APB1上。

一般通信都会打开接收中断,在这里打开CAN1 RX0的中断,优先级可以通过NVIC进行更改。

CAN 的波特率及位同步
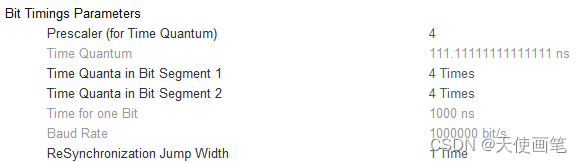
位时序分解

Prescaler:预分频,确定CAN最小时间单位Tq。
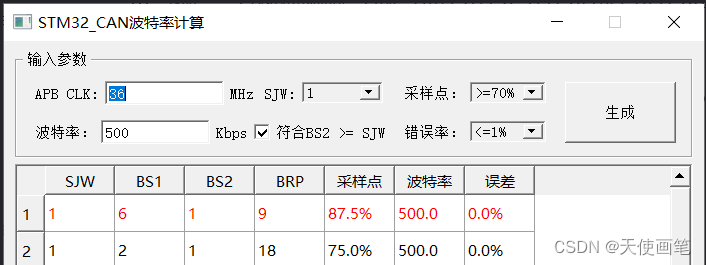
这里以F103C8T6为例,APB1时钟为36Mhz
计算波特率的方法:36M/分频系数/(BS1 + BS2 + 1)
如图设置,波特率是1000Kbps,36M / 4 /(4 + 4 + 1) =1M = 1000K
波特率计算公式: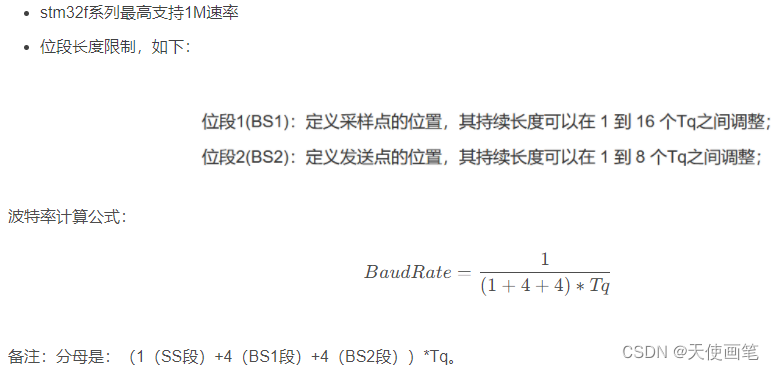
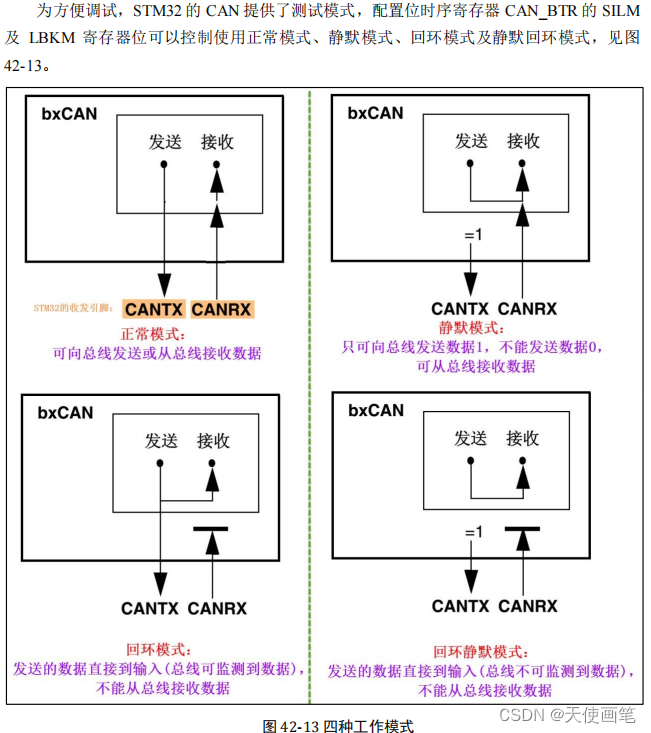
配置工作模式:
 CAN数据帧格式
CAN数据帧格式
CAN波特率计算小工具
STM32 CAN Baud Rate CalculatorV1.0-STM32 CAN Baud Rate Calculator官方下载_3DM软件

STM32的CAN通信波特率计算器
CANPro协议分析平台软件为CANalyst-II+的标配软件

CAN基本函数
函数 功能
HAL_CAN_Start 开启CAN通讯
HAL_CAN_Stop 关闭CAN通讯
HAL_CAN_RequestSleep 使CAN模块完成当前操作后尝试进入休眠模式
HAL_CAN_WakeUp 从休眠模式中唤醒
HAL_CAN_IsSleepActive 检查是否成功处于休眠模式
HAL_CAN_AddTxMessage 向 Tx 邮箱中增加一个消息,并且激活对应的传输请求
HAL_CAN_AbortTxRequest 请求中断传输
HAL_CAN_GetTxMailboxesFreeLevel 查询空闲的发送邮箱个数
HAL_CAN_IsTxMessagePending 检查是否有传输请求在指定的 Tx 邮箱上等待
HAL_CAN_GetRxMessage 从Rx FIFO 收取一个 CAN 帧
HAL_CAN_GetRxFifoFillLevel 查询接收邮箱未读邮箱的个数
STM32HAL库学习——CAN笔记_hal库can_jdhfusk的博客-CSDN博客
发送用到的结构体如下:
typedef struct
{
uint32_t StdId; //标准ID
uint32_t ExtId; //扩展ID
uint32_t IDE; //用来决定报文是使用标准ID还是扩准ID
uint32_t RTR; //用来决定报文是数据帧要是遥控帧
uint32_t DLC; //数据长度,取值为0-8
FunctionalState TransmitGlobalTime;
//最后这个是时间触发模式用的,开启后会自动把时间戳添加到最后两字节的数据中。目前没有用到,选择 DISABLE
} CAN_TxHeaderTypeDef;StdId :如果将要发送的报文使用标准ID,那么这个成员便记录标准ID的值
取值: 0x0 ~ 0x7FFExtId :如果将要发送的报文使用扩展ID,那么这个成员便记录扩展ID的值
取值: 0x0 ~ 0x1FFFFFFFIDE :用来决定报文使用标准ID还是扩准ID
取值: CAN_ID_STD 或 CAN_ID_EXTRTR :用来决定报文是数据帧要是遥控帧
取值: CAN_RTR_DATA 或 CAN_RTR_REMOTEDLC :用来记录数据帧的数据长度,单位字节(如果要发送的是遥控帧,该成员中的内容不起作用)
取值:0 ~ 8TransmitGlobalTime :目前没有用到,选择 DISABLE
取值: ENABLE 或 DISABLE
发送用到的函数如下:
HAL_StatusTypeDef HAL_CAN_AddTxMessage(CAN_HandleTypeDef *hcan, CAN_TxHeaderTypeDef *pHeader, uint8_t aData[], uint32_t *pTxMailbox);
CAN_TxHeaderTypeDef can_Tx;
uint8_t sendBuf[5] = {"hello"};
uint32_t box;int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_CAN_Init();HAL_CAN_Start(&hcan1);can_Tx.StdId = 0x123;can_Tx.ExtId = 0;can_Tx.IDE = CAN_ID_STD;can_Tx.RTR = CAN_RTR_DATA;can_Tx.DLC = 5;can_Tx.TransmitGlobalTime = DISABLE;while (1){HAL_CAN_AddTxMessage(&hcan1, &can_Tx, sendBuf, &box);HAL_Delay(100);}
}
效果:每隔100ms发送一条报文

筛选器
typedef struct
{
uint32_t FilterIdHigh; //CAN_FiR1寄存器的高16位
uint32_t FilterIdLow; //CAN_FiR1寄存器的低16位
uint32_t FilterMaskIdHigh; //CAN_FiR2寄存器的高16位
uint32_t FilterMaskIdLow; //CAN_FiR2寄存器的低16位
uint32_t FilterFIFOAssignment; //通过筛选器的报文存在FIFO0还是FIFO1中
uint32_t FilterBank; //此次配置用的是哪个筛选器。用单CAN的取值为0-13
uint32_t FilterMode; //掩码模式或列表模式
uint32_t FilterScale; //32位或16位
uint32_t FilterActivation; //使能或失能
uint32_t SlaveStartFilterBank; //CAN1和CAN2一起用的时候,为CAN2分配筛选器的个数
} CAN_FilterTypeDef;成员:
FilterIdHigh :CAN_FiR1寄存器的高16位,用于填写筛选码。具体的格式要根据16位、32位;掩码模式、列表模式来确定。
取值: 0x0 ~ 0xFFFFFilterIdLow :CAN_FiR1寄存器的低16位
FilterMaskIdHigh :CAN_FiR2寄存器的高16位
FilterMaskIdLow :CAN_FiR2寄存器的低16位
FilterFIFOAssignment :通过筛选器的报文存在FIFO0还是FIFO1中
取值:CAN_FILTER_FIFO0 或 CAN_FILTER_FIFO1FilterBank :本次配置的筛选器号
取值:对于单CAN为 0 ~ 13;对于双CAN为 0 ~ 27FilterMode :筛选模式,掩码模式或列表模式。
取值:CAN_FILTERMODE_IDMASK 或 CAN_FILTERMODE_IDMASKFilterScale :筛选码大小,16位或32位。
取值:CAN_FILTERSCALE_16BIT 或 CAN_FILTERSCALE_32BITFilterActivation :使能或失能此筛选器。
取值:CAN_FILTER_DISABLE 或 CAN_FILTER_ENABLESlaveStartFilterBank :为从CAN(CAN2)分配的筛选器个数。如果只使用单个CAN,可忽略此成员
取值:0 ~ 27
填好筛选器结构体,然后调用下面这个函数即可生效:
HAL_StatusTypeDef HAL_CAN_ConfigFilter(CAN_HandleTypeDef *hcan, CAN_FilterTypeDef *sFilterConfig);
CAN_FilterTypeDef can_Filter = {0};can_Filter.FilterIdHigh = 0;
can_Filter.FilterIdLow = 0;
can_Filter.FilterMaskIdHigh = 0;
can_Filter.FilterMaskIdLow = 0;
can_Filter.FilterFIFOAssignment = CAN_FILTER_FIFO0;
can_Filter.FilterBank = 0;
can_Filter.FilterMode = CAN_FILTERMODE_IDMASK;
can_Filter.FilterScale = CAN_FILTERSCALE_32BIT;
can_Filter.FilterActivation = CAN_FILTER_ENABLE;HAL_CAN_ConfigFilter(&hcan1, &can_Filter);
效果:CAN总线上所有的报文都会被接收,并存入FIFO0中。
CAN_FilterTypeDef can_Filter = {0};can_Filter.FilterIdHigh = 0;
can_Filter.FilterIdLow = 0;
can_Filter.FilterMaskIdHigh = 0;
can_Filter.FilterMaskIdLow = 2;
can_Filter.FilterFIFOAssignment = CAN_FILTER_FIFO0;
can_Filter.FilterBank = 0;
can_Filter.FilterMode = CAN_FILTERMODE_IDLIST;
can_Filter.FilterScale = CAN_FILTERSCALE_32BIT;
can_Filter.FilterActivation = CAN_FILTER_ENABLE;HAL_CAN_ConfigFilter(&hcan1, &can_Filter);
效果:仅接收标准ID为0x0的数据帧和遥控帧,并存入FIFO0中。
接收
CAN的接收通常是使用中断方式来实现(因为没有DMA,而查询法又难以保证实时性),因此首先要在CubeMX中打开接收的全局中断。
以看到有两个中断,一个是FIFO0收到数据的RX0中断,另一个是FIFO1收到数据的RX1中断,这里只用到了FIFO0,所以只勾选这个。(这里也说一说自己的理解,由于一个FIFO只能保存3条报文,有了两个FIFO就能保存6条报文。我们可以通过筛选器把不同ID的报文装进不同的FIFO,比如我们可以让FIFO0来接收关键、重要的报文,用FIFO1来接收不那么重要的报文,并且这两个中断是独立的,我们甚至可以给它们配置不一样的中断优先级。)
光打开全局中断还不够,我们还需要打开CAN的FIFO消息挂起中断请求(也就是CAN外设的中断使能位)。
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
这样,当CAN收到了符合筛选器的报文时,就会触发这个中断,我们便可以在这个中断回调函数中接收并处理收到的报文。(由于FIFO0和FIFO1用到的中断函数是独立的,因此这里的回调函数也是不一样的,大家要看清楚是FIFO0的还是1的)
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &can_Rx, recvBuf);/*下面是你用来处理收到数据的代码,可以通过串口把内容发送出来,也可以用来控制某些外设*/
}
接收用到的结构体如下:
typedef struct
{uint32_t StdId; uint32_t ExtId; uint32_t IDE; uint32_t RTR; uint32_t DLC; uint32_t Timestamp; uint32_t FilterMatchIndex;
} CAN_RxHeaderTypeDef;
和发送结构体非常类似,不过这个结构体并不需要我们来赋值,而是作为接收函数的输出参数。这里仅介绍发送结构体没有的成员:
Timestamp:只有使能了时间触发模式才有用,记录时间戳FilterMatchIndex:这条报文被接收是通过哪个筛选器
接收用到的函数如下:
HAL_StatusTypeDef HAL_CAN_GetRxMessage(CAN_HandleTypeDef *hcan, uint32_t RxFifo, CAN_RxHeaderTypeDef *pHeader, uint8_t aData[]);
参数:
*hcan:can的句柄,由CubeMX自动帮我们定义RxFifo:接收FIFO号。参数:CAN_RX_FIFO0或CAN_RX_FIFO1pHeader:接收结构体,这里作为输出参数aData[]:接收数组,这里作为输出参数
示例:
#include <stdio.h>CAN_RxHeaderTypeDef can_Rx;
uint8_t recvBuf[8];uint8_t uartBuf[64];int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_CAN_Init();MX_USART1_UART_Init()CAN_FilterTypeDef can_Filter = {0};can_Filter.FilterIdHigh = 0;can_Filter.FilterIdLow = 0;can_Filter.FilterMaskIdHigh = 0;can_Filter.FilterMaskIdLow = 0;can_Filter.FilterFIFOAssignment = CAN_FILTER_FIFO0;can_Filter.FilterBank = 0;can_Filter.FilterMode = CAN_FILTERMODE_IDMASK;can_Filter.FilterScale = CAN_FILTERSCALE_32BIT;can_Filter.FilterActivation = CAN_FILTER_ENABLE;HAL_CAN_ConfigFilter(&hcan1, &can_Filter);HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);HAL_CAN_Start(&hcan1);while (1){}
}void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
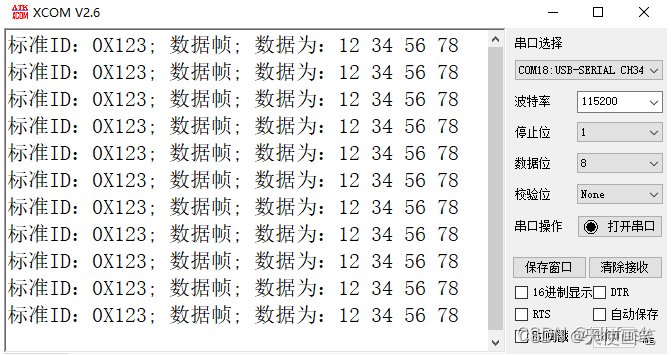
{uint16_t len = 0;HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &can_Rx, recvBuf);if(can_Rx.IDE == CAN_ID_STD){len += sprintf((char *)&uartBuf[len], "标准ID:%#X; ", can_Rx.StdId);}else if(can_Rx.IDE == CAN_ID_EXT){len += sprintf((char *)&uartBuf[len], "扩展ID:%#X; ", can_Rx.ExtId);}if(can_Rx.RTR == CAN_RTR_DATA){len += sprintf((char *)&uartBuf[len], "数据帧; 数据为:");for(int i = 0; i < can_Rx.DLC; i ++){len += sprintf((char *)&uartBuf[len], "%X ", recvBuf[i]);}len += sprintf((char *)&uartBuf[len], "\r\n");HAL_UART_Transmit(&huart1, uartBuf, len, 100); }else if(can_Rx.RTR == CAN_RTR_REMOTE){len += sprintf((char *)&uartBuf[len], "遥控帧\r\n");HAL_UART_Transmit(&huart1, uartBuf, len, 100); }
}
效果:接收CAN总线上所有数据,并将内容通过串口打印出来
STM32 CAN初始化详解
CAN是控制器域网 (Controller Area Network, CAN) 的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发了的,并最终成为国际标准(ISO11898)。是国际上应用最广泛的现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。近年来,其所具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。
原文链接:https://blog.csdn.net/qq_20017379/article/details/125902421
u8 CAN1_Mode_Init(u8 tsjw, u8 tbs2,u8 tbs1, u16 brp, u8 mode)
{/* gpio结构体 */GPIO_InitTypeDef GPIO_InitStructure;/* can 初始化结构体 */CAN_InitTypeDef CAN_InitStructure;/* can过滤器结构体 */CAN_FilterInitTypeDef CAN_FilterInitStructure;/* 使能时钟 */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);/* 初始化gpio设置引脚复用模式推挽速率100上拉*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_Init(GPIOA, &GPIO_InitStructure);/* 复用pa11 pa12为can功能 */GPIO_PinAFConfig(GPIOA, GPIO_PinSource11, GPIO_AF_CAN1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource12, GPIO_AF_CAN1);/* 初始化can结构体 *//*事件触发消息传输机制在TTCAN模式下,CAN硬件的内部定时器被激活,并且被用于产生发送与接收邮箱的)时间戳为了使can满足,适合实时性和可靠性要求特别高或有安全性要求的场合路上各节点取得同步后, 消息只能根据调度表在规定的时间隙传输, 避免了消息传输的冲突、仲裁,消息传 输时延短, 且可预知*/CAN_InitStructure.CAN_TTCM=DISABLE;/* 软件自动离线管理ENABLE:一旦硬件检测到128 次11位连续的隐性位,则自动退出离线状态将ABOM设1后,一旦检测到条件会自动恢复的,不需要人工干预如果ABOM位为’1’,bxCAN进入离线状态后,就自动开启恢复过程。如果ABOM位为’0’,软件必须先请求bxCAN进入然后再退出初始化模式,随后恢复过程才被开启*/CAN_InitStructure.CAN_ABOM=DISABLE;/* 睡眠模式禁用软件通过对CAN_MCR寄存器的SLEEP位置’1’,来请求进入这一模式。在该模式下,bxCAN的时钟停止了,但软件仍然可以访问邮箱寄存器。当bxCAN处于睡眠模式,软件必须对CAN_MCR寄存器的INRQ位置’1’并且同时对SLEEP位清’0’,才能进入初始化模式。有2种方式可以唤醒(退出睡眠模式)bxCAN:通过软件对SLEEP位清’1’,或硬件检测到CAN总线的活动。如果CAN_MCR寄存器的AWUM位为’1’,一旦检测到CAN总线的活动,硬件就自动对SLEEP位清’0’来唤醒bxCAN。如果CAN_MCR寄存器的AWUM位为’0’,软件必须在唤醒中断里对SLEEP位清’0’才能退出睡眠状态。注: 如果唤醒中断被允许(CAN_IER寄存器的WKUIE位为’1’),那么一旦检测到CAN总线活动就会产生唤醒中断,而不管硬件是否会自动唤醒bxCAN。在对SLEEP位清’0’后,睡眠模式的退出必须与CAN总线同步,当硬件对SLAK位清’0’时,就确认了睡眠模式的退出。*/CAN_InitStructure.CAN_AWUM=DISABLE;/* 自动重传使能该模式主要用于满足CAN标准中,时间触发通信选项的需求。通过对CAN_MCR寄存器的NART位置’1’,来让硬件工作在该模式。在该模式下,发送操作只会执行一次。如果发送操作失败了,不管是由于仲裁丢失或出错,硬件都不会再自动发送该报文。*/CAN_InitStructure.CAN_NART=ENABLE;/*报文不锁定,新报文覆盖旧报文*/CAN_InitStructure.CAN_RFLM=DISABLE;/* 优先级由报文标识符决定本成员用于选择CAN报文发送优先级判定方法用于选择CAN报文发送优先级判定方法*/CAN_InitStructure.CAN_TXFP=DISABLE;/*#define CAN_Mode_Normal 正常模式#define CAN_Mode_LoopBack 回环模式 自己发,自己收回环模式下,它自己的输出端的所有内容都直接传输到自己的输入端,输出端的内容同时也会被传输到总线上,即也可使用总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。使用回环模式可以进行自检。#define CAN_Mode_Silent 静默模式静默模式下,它自己的输出端的逻辑 0 数据会直接传输到它自己的输入端,逻辑1可以被发送到总线,所以它不能向总线发送显性位(逻辑 0),只能发送隐性位(逻辑 1)。输入端可以从总线接收内容。由于它只可发送的隐性位不会强制影响总线的状态,所以把它称为静默模式。这种模式一般用于监测,它可以用于分析总线上的流量,但又不会因为发送显性位而影响总线#define CAN_Mode_Silent_LoopBack 静默回环模式回环静默模式是以上两种模式的结合,自己的输出端的所有内容都直接传输到自己的输入端,并且不会向总线发送显性位影响总线,不能通过总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。这种方式可以在“热自检”时使用,即自我检查的时候,不会干扰总线*/CAN_InitStructure.CAN_Mode= mode;/*重新同步跳跃宽度(SJW) 。定义了在每位中可以延长或缩短多少个时间单元的上限。其值可以编程为1到4个时间单元*/CAN_InitStructure.CAN_SJW=tsjw;/*时间段1(BS1):定义采样点的位置。其值可以编程为1到16个时间单元,但也可以被自动延长,以补偿因为网络中不同节点的频率差异所造成的相位的正向漂移。*/CAN_InitStructure.CAN_BS1=tbs1;/*时间段2(BS2):定义发送点的位置。其值可以编程为1到8个时间单元,但也可以被自动缩短以补偿相位的负向漂移。*/CAN_InitStructure.CAN_BS2=tbs2;/*分频率*/CAN_InitStructure.CAN_Prescaler=brp;/* 初始化结构体 */CAN_Init(CAN1, &CAN_InitStructure);/* 初始化过滤器 *//*选择过滤器0~13 for one can register*/CAN_FilterInitStructure.CAN_FilterNumber = 0;/*屏蔽位模式和标识符列表模式#define CAN_FilterMode_IdMask ((uint8_t)0x00) #define CAN_FilterMode_IdList ((uint8_t)0x01)*/CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;/* 过滤器的位数#define CAN_FilterScale_16bit ((uint8_t)0x00)#define CAN_FilterScale_32bit ((uint8_t)0x01)*/CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;/*32位ID 高位*/CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;32??ID/*32位ID 低位*/CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;/* 屏蔽位高字节 */CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;/* 屏蔽位低字节 */CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;/* 设定接收FIFO */CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0;/* 激活过滤组 */CAN_FilterInitStructure.CAN_FilterActivation = ENABLE;/* 初始化过滤器 */CAN_FilterInit(&CAN_FilterInitStructure);/* 配置can中断*/NVIC_InitTypeDef NVIC_InitStructure;CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE);NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);return 0;
} 相关文章:
STM32 cubemx CAN
接收用到的结构体如下:CAN概念: 全称Controller Area Network,是一种半双工,异步通讯。 物理层: 闭环:允许总线最长40m,最高速1Mbps,规定总线两端各有一个120Ω电阻,闭环…...
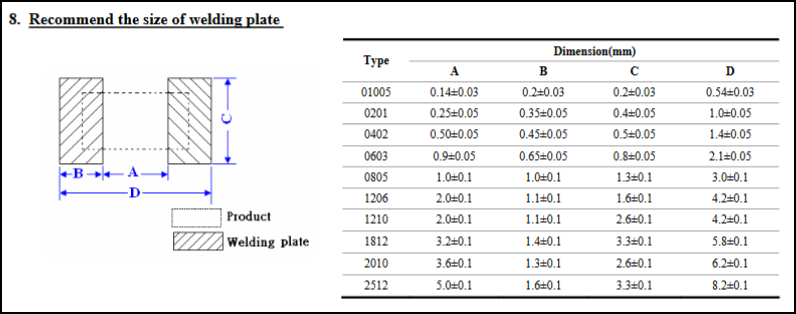
贴片电阻封装尺寸及焊盘尺寸
1、贴片电阻封装尺寸 有英制和公制之分,英制的单位是inch,公制的单位是m;(m、cm、mm只是进制不同) 通常说的都是英制,比如0603指的是inch单位下的0.06inch和0.03inch; 下图有inch和mm的对照、…...
软考笔记——9.软件工程
软件工程的基本原理:用分阶段的生命周期计划严格管理、坚持进行阶段评审、实现严格的产品控制、采用现代程序设计技术、结果应能清除的审查、开发小组的人员应少而精、承认不断改进软件工程事件的必要性。 软件工程的基本要素:方法、工具、过程 软件生…...

uniapp小程序实现上传图片功能,并显示上传进度
效果图: 实现方法: 一、通过uni.chooseMedia(OBJECT)方法,拍摄或从手机相册中选择图片或视频。 官方文档链接: https://uniapp.dcloud.net.cn/api/media/video.html#choosemedia uni.chooseMedia({count: 9,mediaType: [image,video],so…...

基于物理场的动态模式分解(piDMD)研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

Docker部署rabbitmq遇到的问题 Stats in management UI are disabled on this node
1. Stats in management UI are disabled on this node #进入rabbitmq容器 docker exec -it {rabbitmq容器名称或者id} /bin/bash#进入容器后,cd到以下路径 cd /etc/rabbitmq/conf.d/#修改 management_agent.disable_metrics_collector false echo management_age…...

Python搭建http文件服务器实现手机电脑文件传输功能
第一种代码的界面如下:(有缺点,中文乱码) # !/usr/bin/env python3 # -*- coding:utf-8 _*-"""Simple HTTP Server With Upload. python -V3.6 This module builds on http.server by implementing the standard G…...

微信小程序实现拖拽的小球
目录 前言 js 获取微信小程序中获取系统信息 触摸移动事件的处理函数 触摸结束事件的处理函数 用于监听页面滚动事件 全局参数 html CSS 前言 小程序开发提供了丰富的API和事件处理函数,使得开发者可以方便地实现各种交互功能。其中,拖拽功能…...
uniapp的逆地理编码 和地理编码
1.先打开高德地图api找到那个 地理编码 2.封装好我们的请求 3.逆地理编码 和地理编码 都是固定的 记住自己封装的请求 就可以了 这个 是固定的 方式 下面这个是固定的 可以复制过去 getlocation就是uniapp提供的 获取经纬度 然后 下面的 就是高德地图提供的 方法 要想使用我…...
在Centos环境中搭建Nginx环境
一、Nginx概念简介 Nginx是一个轻量级的高性能HTTP反向代理服务器,同时它也是一个通用类型的代理服务器,支持绝大部分协议,如TCP、UDP、SMTP、HTTPS等。 Nginx与redis相同,都是基于多路复用模型构建出的产物,因此它与R…...

20W IP网络吸顶喇叭 POE供电吸顶喇叭
SV-29852T 20W IP网络吸顶喇叭产品简介 产品用途: ◆室内豪华型吸顶喇叭一体化网络音频解码扬声器,用于广播分区音频解码、声音还原作用 ◆应用场地如火车站、地铁、教堂、工厂、仓库、公园停车场等;室内使用效果均佳。 产品特点ÿ…...

React 之 Suspense和lazy
一. Suspense 参考链接:https://react.docschina.org/reference/react/Suspense suspense:n. 焦虑、悬念 <Suspense> 允许你显示一个退路方案(fallback)直到它的所有子组件完成加载。 <Suspense fallback{<Loadin…...

Kafka中的 ISR 机制
ISR 是什么 ISR 的全称叫做: In-Sync Replicas (同步副本集), 可以理解为和 leader 保持同步的所有副本的集合。ISR 动态维护了一个和 leader 副本保持同步副本集合,ISR 中的副本全部都和 leader 的数据保持同步。 设一个场景&a…...

01 Python 网络爬虫:爬虫技术的核心原理
不夸张地说,现在哪怕是初中生,只要花点儿时间、精力稍微按「网络爬虫」的开发步骤学习了解一下,也能把它玩得贼溜。 听起来感觉是很高大上的东西,但实际上并不复杂,也就是使用了某种编程语言按照一定步骤、规则主动通…...
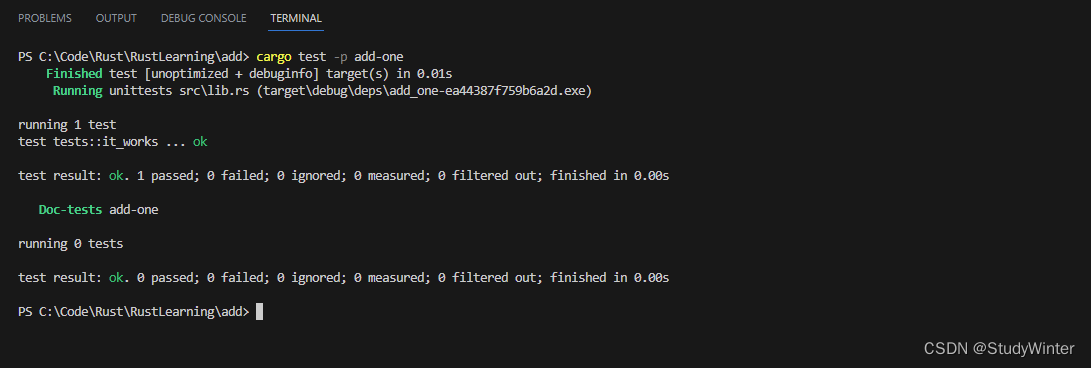
【Rust】Rust学习 第十四章进一步认识 Cargo 和 Crates.io
本章会讨论 Cargo 其他一些更为高级的功能,我们将展示如何: 使用发布配置来自定义构建将库发布到 crates.io使用工作空间来组织更大的项目从 crates.io 安装二进制文件使用自定义的命令来扩展 Cargo Cargo 的功能不止本章所介绍的,关于其全…...

Android性能优化----执行时间优化
作者:lu人皆知 在APP做启动优化时,Application会做一些初始化的工作,但不要在Application中做耗时操作,然而有些初始化工作可能是很耗时的,那怎么办?初始化操作可以开启子线程来完成。 计算执行时间 常规…...
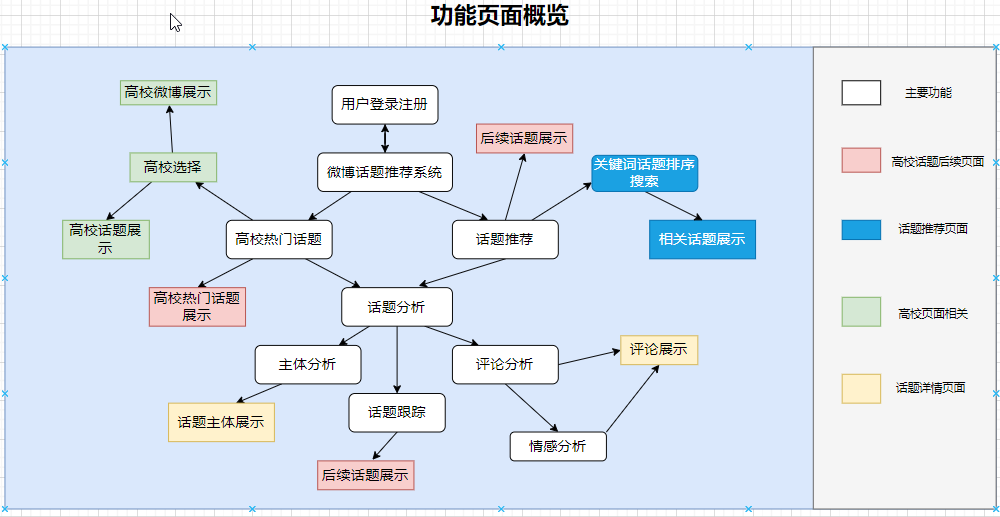
基于Python的微博大数据舆情分析,舆论情感分析可视化系统,可作为Python毕业设计
运行效果图 基于Python的微博大数据舆情分析,舆论情感分析可视化系统 系统介绍 微博舆情分析系统,项目后端分爬虫模块、数据分析模块、数据存储模块、业务逻辑模块组成。 先后进行了数据获取和筛选存储,对存储后的数据库数据进行提取分析处…...

被迫学习一波Linux命令
事情起因 部署一个服务,人家说了最低配置是3G,我没当回事,拿着个2G的服务器直接就上了,结果,哈哈,都能猜到结果:服务器内存爆了!!!而且最可气的是服务器还登…...

字符串变量拼接操作的底层原理
在java中,字符串变量拼接操作使用的是StringBuilder或StringBuffer类,这两个类都是可变的字符串缓冲区。java中的字符串是不可变的,因此在进行字符串拼接时需要使用可变的字符串缓冲区,以避免不必要的内存分配和复制。具体来说&am…...
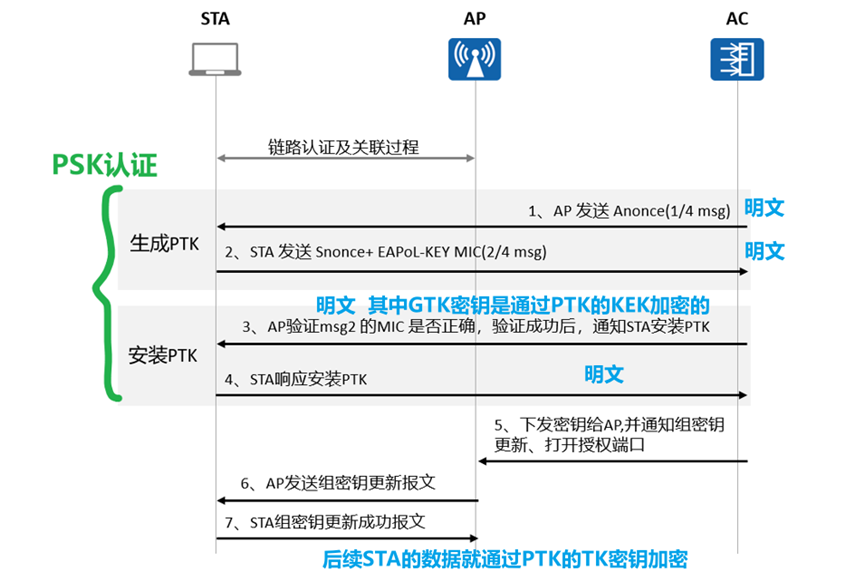
Wlan安全——认证与加密方式(WPA/WPA2)
目录 终端认证技术 WEP认证 PSK认证 802.1x认证与MAC认证 Portal认证 数据加密技术 WEP加密 TKIP加密 CCMP加密 TKIP和CCMP生成密钥所需要的密钥信息 802.11安全标准 WEP共享密钥认证、加密工作原理 WEP共享密钥认证 WEP加解密过程 PSK认证以及生成动态密钥的工…...

用MATLAB复现机载雷达杂波频谱:从Morchin模型到LFM信号仿真的保姆级教程
MATLAB实战:机载雷达杂波频谱建模与LFM信号仿真全解析 雷达信号处理工程师常面临一个经典难题:如何将教科书中的杂波理论转化为可运行的代码?本文将以Morchin模型为核心,手把手带你完成从地/海杂波建模到LFM雷达回波仿真的完整链路…...

AI代理如何革新领导力评估:从隐藏档案任务到低成本高效测量
1. 项目概述:当AI成为你的“面试官”,领导力评估正在发生什么?如果你是一位人力资源总监,或者是一位正在为团队选拔继任者而头疼的部门负责人,那么下面这个场景你一定不陌生:为了评估一个候选人的真实领导潜…...

构建工业级电力通信系统的终极指南:libiec61850开源库深度解析
构建工业级电力通信系统的终极指南:libiec61850开源库深度解析 【免费下载链接】libiec61850 Official repository for libIEC61850, the open-source library for the IEC 61850 protocols 项目地址: https://gitcode.com/gh_mirrors/li/libiec61850 在现代…...

如何轻松备份微信聊天记录:iOS用户的终极解决方案
如何轻松备份微信聊天记录:iOS用户的终极解决方案 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾经因为手机损坏或更换设备而丢失了珍贵的微信聊天记…...
原理与应用全解析)
时序电路的心脏:钟控触发器(RS/D/JK/T)原理与应用全解析
1. 时序电路的心脏:为什么需要钟控触发器? 第一次接触数字电路时,我被各种触发器绕得头晕。直到老师用"心脏"来比喻钟控触发器,才恍然大悟——就像心脏通过规律跳动为全身供血一样,钟控触发器通过时钟脉冲协…...

新手入门零门槛,Captain AI助你7天玩转Ozon
在俄罗斯跨境电商的风口下,Ozon平台吸引了无数新手商家入局。然而,流程繁琐、经验不足、语言不通三大门槛,让超过60%的新手在入驻前3个月就铩羽而归。据行业数据显示,Ozon新手商家的3个月存活率不足40%,其中80%的失败都…...

百度首页网页图片更多当AI开始写测试用例,手工测试工程师的护城河在哪里?
一、 第一道护城河:从“用例执行者”到“策略设计者”AI可以基于需求文档和历史数据,瞬间生成海量测试用例。但它无法回答一个根本性的问题:我们究竟应该测试什么?测试策略的设计,是在有限的时间和资源下,对…...

声明式数据转换利器:Refiner 实战指南与架构集成
1. 项目概述与核心价值最近在折腾一个老项目的数据清洗和转换,被一堆格式混乱、结构不一的JSON文件搞得焦头烂额。手动写脚本处理吧,每次需求一变就得重写,维护成本太高;用现成的ETL工具吧,又觉得过于笨重,…...

服装吊牌变量条码打印机:优质供应商选择策略解析
“选对服装吊牌变量条码打印机供应商,比单纯比价更重要的是匹配柔性生产需求——这是超六成服装从业者反馈的采购核心准则。”中小商家面临小批量吊牌外发成本高、出货慢的困境,大企业则受限于多SKU适配难、数据不同步的痛点,如何找到能覆盖全…...
别再死磕ViT了!用Swin-Transformer搞定高分辨率图像识别,保姆级原理拆解
高分辨率图像识别新范式:Swin-Transformer实战指南 当计算机视觉工程师面对4K医学影像或卫星地图时,传统ViT模型往往会遭遇显存爆炸的尴尬。我曾在一个遥感项目中发现,直接将ViT应用于20482048像素的图像,单次前向传播就消耗了32G…...