图像处理常见的两种拉流方式
传统算法或者深度学习在进行图像处理之前,总是会首先进行图像的采集,也就是所谓的拉流。解决拉流的方式有两种,一个是直接使用opencv进行取流,另一个是使用ffmpeg进行取流,如下分别介绍这两种方式进行拉流处理。
1、opencv直接取流
opencv的取流方式主要是利用VideoCapture类进行处理的。VideoCapture提供了一整套的读取视频流信息的方案,主要的函数如下:
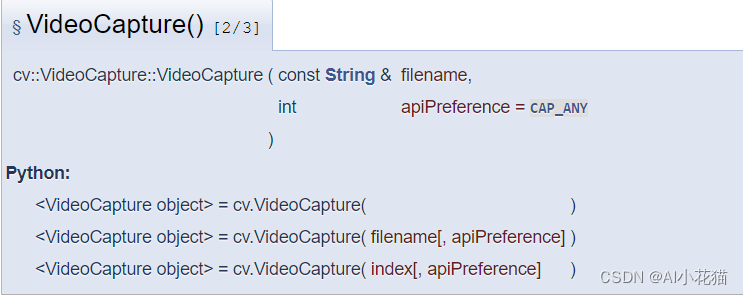
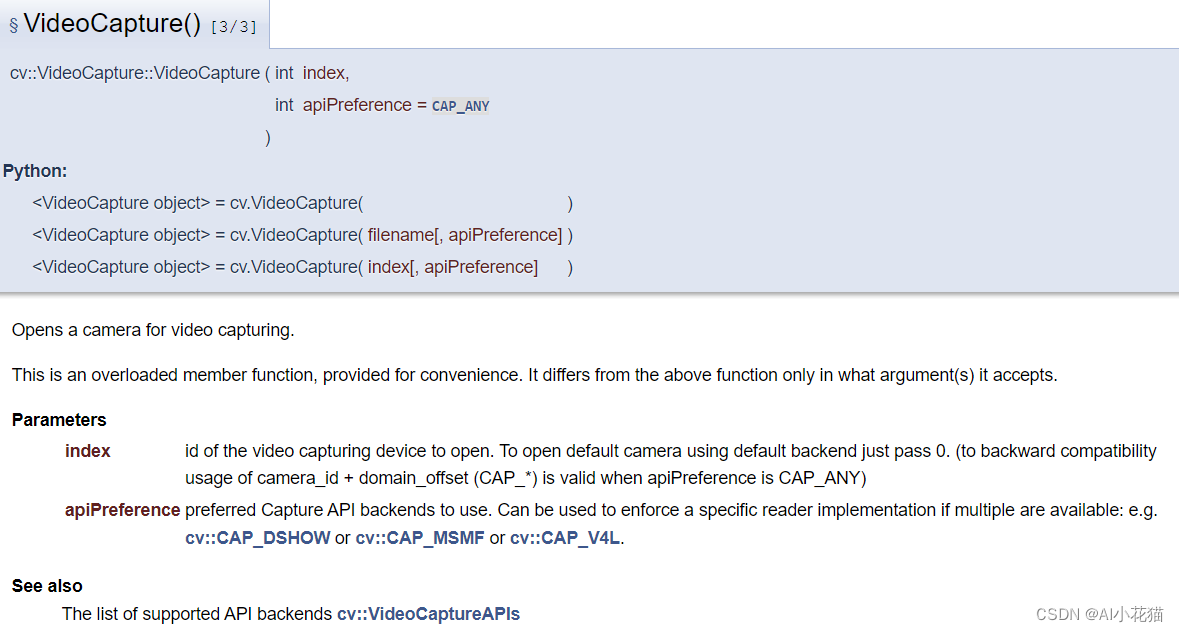
VideoCapture有三个构造函数:
- 不带任何参数的构造函数
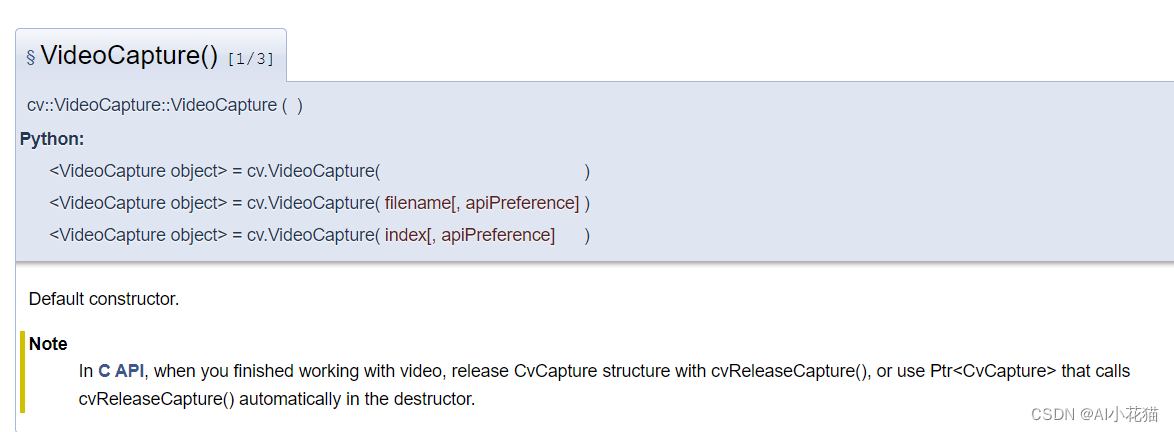
- 带有一个视频流地址的构造函数
- 带有一个视频index的构造函数
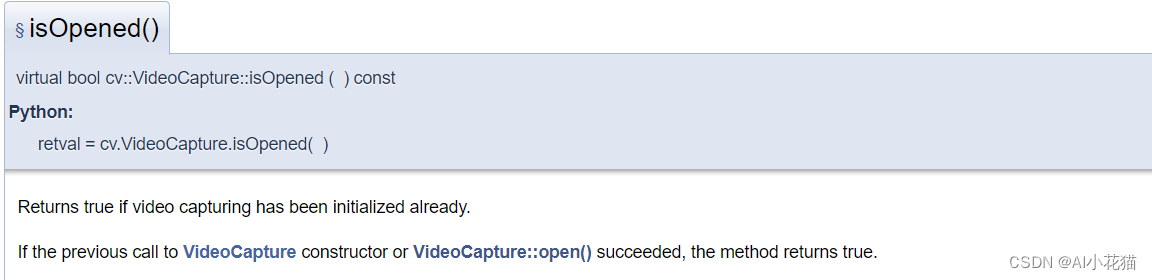
isOpened()函数主要是判定是否成功打开流地址
read()读取视频数据

release()函数用于释放类对象
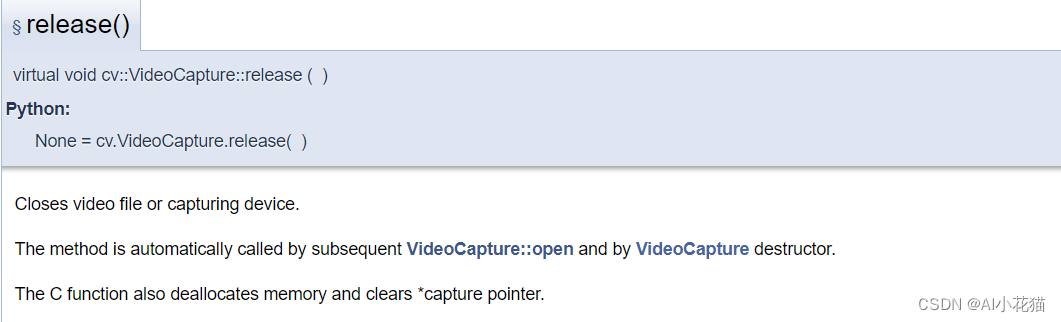
具体参考地址:https://docs.opencv.org/4.0.0/d8/dfe/classcv_1_1VideoCapture.html
1.1 python拉流
主要流程为分为以下几步:
- 通过流的地址实例化VideoCapture类
- 判断是否成功打开流地址
- 循环读取每一帧流数据并处理
- 释放实例化的对象
- 释放cv
def vedio2Img(vedio_path, save_path):cap = cv2.VideoCapture(vedio_path)fps = int(cap.get(cv2.CAP_PROP_FPS))total_count = cap.get(cv2.CAP_PROP_FRAME_COUNT)count = 0img_idx = 0if not cap.isOpened():returnwhile True:success, frame = cap.read()if success:try:count += 1if count % fps == 0:img_idx += 1name = save_path.split('\\')[-1]save_path1 = os.path.join(save_path, '{}_vedio_{}.jpg'.format(name, str(img_idx)))save_img(save_path1, frame)print('finish number {} img save'.format(img_idx))cv2.waitKey(1)except:print('encounter some wrong')continuecap.release()cv2.destroyAllWindows()
1.2 C++ opencv拉流
c++的使用opencv拉流的方式和opencv基本一致(ps:python的底层应该是C++实现的),因此其实现格式如下所示:
std::string vedio_path = "rtsp://admin:123456@127.0.0.1/Streaming/Channels/11000";cv::VideoCapture cap;cap.open(vedio_path);if (!cap.isOpened()) {std::cout << "error about cap" << std::endl;}VideoFrameDecode videoframe;cv::Mat frame;while (cap.read(frame)){if (frame.empty()) {break;}int w = frame.size().width;int h = frame.size().height;printf("h=%i,w=%i", h, w);unsigned char* buffer = frame.data;size_t stride = frame.step;cv::Mat img = cv::Mat(h, w, CV_8UC3, (void*)buffer, stride);cv::namedWindow("demo", cv::WINDOW_NORMAL);cv::imshow("demo", img);cv::waitKey(0);}cap.release();cv::destroyAllWindows();
2、ffmpeg拉流(C++实现)
-
下载ffmpeg包的
ffmpeg包下载地址
博主下载的5.1.2版本
-
vs2022配置使用
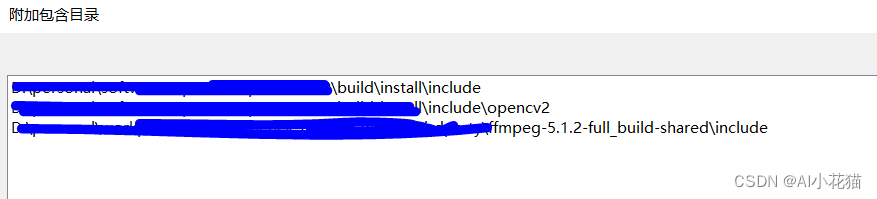
在C/C+±>附加包含目录中添加新下载的ffmpeg包的include路径
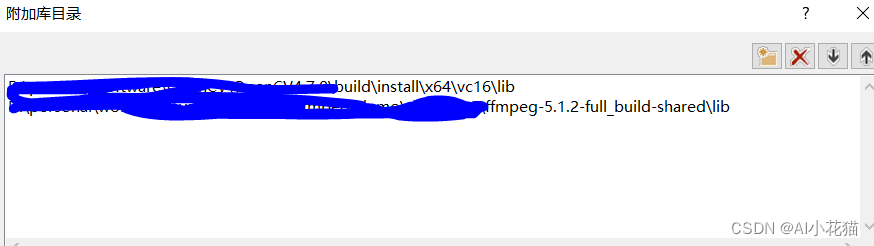
在链接器->附加库目录中添加ffmpeg包的lib文件路径
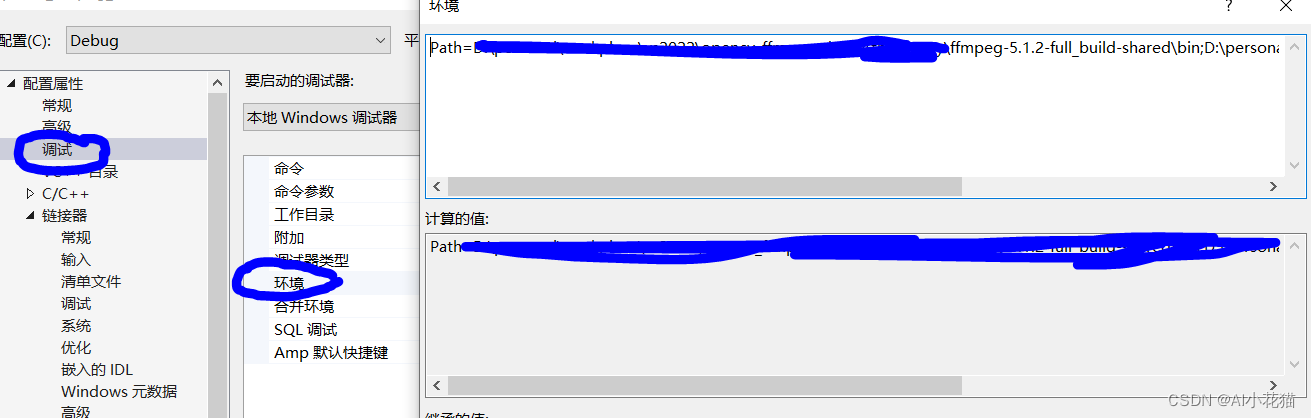
在链接器->输入->附加依赖项中加入所需要的lib库目录,整理如下:avcodec.lib avdevice.lib avfilter.lib avformat.lib avutil.lib swresample.lib swscale.lib如果不想在环境变量中配置ffmpeg中bin文件的目录,可以使用如下方式临时配置:
在调试->环境中使用Path=D:\ffmpeg\bin;%PATH即可临时使用
博主将拉流方式封装为一个类,主要代码如下所示:
ffmpeg.h文件如下:
#ifndef __FFMPEG_DECODE_H__
#define __FFMPEG_DECODE_H__// Opencv
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
extern "C"
{
#include<libavutil/avutil.h>
#include<libavutil/imgutils.h>
#include <libavcodec/avcodec.h>
#include <libavformat/avformat.h>
#include <libswscale/swscale.h>
#include<libavdevice/avdevice.h>
};struct VideoFrameDecode {void* buffer; //֡帧的buffer指针(仅支持RGB格式)int pitch; //图像一行的宽度
};class ReadFfmpeg
{
public:ReadFfmpeg(char* rtsppath);~ReadFfmpeg();void processOneFrame(cv::Mat &img);private:AVFormatContext* formatContext = nullptr; int ret = -1;int videoStreamIndex = -1;AVCodecParameters* codecParameters = nullptr;const AVCodec* codec = nullptr; AVCodecContext* codecContext = nullptr; AVPacket packet; AVFrame* pFrameRGB;uint8_t* buffer;SwsContext* sws_ctx; };
#endif
其中具体实现的ffmpeg.cpp文件如下所示
#include "ReadFfmpeg.h"
#include <iostream>
#include<chrono>
#include<thread>
using namespace std;ReadFfmpeg::ReadFfmpeg(char* rtsppath)
{avformat_network_init();AVDictionary* formatOptions = nullptr;av_dict_set_int(&formatOptions, "buffer_size", 2 << 20, 0);av_dict_set(&formatOptions, "rtsp_transport", "tcp", 0); //默认使用udp协议进行传输,会出现max delay reached. need to consume packet av_dict_set_int(&formatOptions, "timeout", 5000000, 0);formatContext = avformat_alloc_context();ret = avformat_open_input(&formatContext, rtsppath, nullptr, &formatOptions);if (ret != 0) {std::cerr << "Failed to open RTSP stream." << std::endl;}ret = avformat_find_stream_info(formatContext, nullptr);if (ret < 0) {std::cerr << "Failed to find stream info." << std::endl;}for (unsigned int i = 0; i < formatContext->nb_streams; ++i) {if (formatContext->streams[i]->codecpar->codec_type == AVMEDIA_TYPE_VIDEO) {videoStreamIndex = i;break;}}if (videoStreamIndex == -1) {std::cerr << "Failed to find video stream." << std::endl;}codecParameters = formatContext->streams[videoStreamIndex]->codecpar;codec = avcodec_find_decoder(codecParameters->codec_id);if (codec == nullptr) {std::cerr << "Failed to find video decoder." << std::endl;}codecContext = avcodec_alloc_context3(codec);if (avcodec_parameters_to_context(codecContext, codecParameters) < 0) {std::cerr << "Failed to allocate codec context." << std::endl;}ret = avcodec_open2(codecContext, codec, nullptr);if (ret < 0) {std::cerr << "Failed to open codec." << std::endl;}pFrameRGB = av_frame_alloc();buffer = (uint8_t*)av_malloc(av_image_get_buffer_size(AV_PIX_FMT_RGB24, codecContext->width, codecContext->height, 1));av_image_fill_arrays(pFrameRGB->data, pFrameRGB->linesize, buffer, AV_PIX_FMT_RGB24, codecContext->width, codecContext->height, 1);sws_ctx = sws_getContext(codecContext->width, codecContext->height, codecContext->pix_fmt,codecContext->width, codecContext->height, AV_PIX_FMT_RGB24,SWS_BILINEAR, nullptr, nullptr, nullptr);ret = av_read_frame(formatContext, &packet);if (ret < 0) {std::cerr << "Failed to open packet." << std::endl;}
}ReadFfmpeg::~ReadFfmpeg()
{avformat_network_deinit();avcodec_free_context(&codecContext);sws_freeContext(sws_ctx); av_free(pFrameRGB);av_free(buffer);av_free(codecParameters);avformat_close_input(&formatContext);
}void ReadFfmpeg::processOneFrame(cv::Mat& img)
{if (img.empty()){img = cv::Mat(codecContext->height, codecContext->width, CV_8UC3);}int ret = av_read_frame(formatContext, &packet);if (ret >= 0) {if (packet.stream_index == videoStreamIndex) {avcodec_send_packet(codecContext, &packet);AVFrame* avFrame = av_frame_alloc();int res = avcodec_receive_frame(codecContext, avFrame);if (res == 0) {// Convert frame to RGBsws_scale(sws_ctx, avFrame->data, avFrame->linesize, 0, codecContext->height, pFrameRGB->data, pFrameRGB->linesize);img.data = pFrameRGB->data[0];}av_frame_free(&avFrame);}}av_packet_unref(&packet);
}void test() {char* filename = (char*)"rtsp://admin:123456@127.0.0.1:10000/Streaming/Channels/10000";ReadFfmpeg* fmpeg = new ReadFfmpeg(filename);cv::Mat img;int nFrame = 0;auto start = std::chrono::system_clock::now();for (;;){nFrame++;fmpeg->processOneFrame(img);if (nFrame % 100==0) {nFrame = 0;auto end = std::chrono::system_clock::now();auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end - start);std::cout << "the fps is: " << static_cast<float>(100 / (duration.count() / 1000.0)) << std::endl;start = end;}// Display framecv::namedWindow("RTSP Stream", cv::WINDOW_NORMAL);cv::imshow("RTSP Stream", img);cv::waitKey(1);}delete fmpeg;}以上是一个非常简单的拉流方式,仅可以用作一个demo,实现流的读取,如果想达到实时状态的取流和处理,需要使用多线程的方式,实现一个读取流数据的线程,将数据放入队列,同时实现一个读取流数据的线程,从队列读取数据,同时运行。
附录
实际上opencv也是可以使用ffmpeg的方式进行拉流的,只不过需要在编译opencv的时候,指定ffmpeg版本。
相关文章:
图像处理常见的两种拉流方式
传统算法或者深度学习在进行图像处理之前,总是会首先进行图像的采集,也就是所谓的拉流。解决拉流的方式有两种,一个是直接使用opencv进行取流,另一个是使用ffmpeg进行取流,如下分别介绍这两种方式进行拉流处理。 1、o…...

数据可视化数据调用浅析
数据可视化是现代数据分析和决策支持中不可或缺的一环。它将数据转化为图形、图表和可视化工具,以便更直观地理解和解释数据。在数据可视化的过程中,数据的调用和准备是关键的一步。本文将探讨数据可视化中的数据调用过程,并介绍一些常用的数…...

恒运资本:CPO概念发力走高,兆龙互联涨超10%,华是科技再创新高
CPO概念15日盘中发力走高,截至发稿,华是科技涨超15%再创新高,兆龙互联涨逾11%,中贝通讯涨停,永鼎股份、太辰光涨超5%,天孚通讯涨逾4%。 消息面上,光通讯闻名咨询机构LightCounting近日发布的202…...
【蓝桥杯】[递归]母牛的故事
原题链接:https://www.dotcpp.com/oj/problem1004.html 目录 1. 题目描述 2. 思路分析 3. 代码实现 1. 题目描述 2. 思路分析 我们列一个年份和母牛数量的表格: 通过观察,找规律,我们发现: 当年份小于等于4时&…...
使用RDP可视化远程桌面连接Linux系统
使用RDP可视化远程桌面连接Linux系统 远程桌面连接Linux安装安装包准备服务器安装xrdp远程连接 远程桌面连接Linux 通常使用SSH来连接服务器,进行命令行操作,但是这次需要远程调试生产环境的内网服务器,进行浏览器访问内网网站,至…...
数据可视化diff工具jsondiffpatch使用学习
1.jsondiffpatch 简介 jsondiffpatch 是一个用于比较和生成 JSON 数据差异的 JavaScript 库。它可以将两个 JSON 对象进行比较,并生成一个描述它们之间差异的 JSON 对象。这个差异对象可以用于多种用途,例如: 生成可视化的差异报告应用差异…...

pdf 转 word
pdf 转 word 一、思路 直接调用LibreOffice 命令进行文档转换的命令行工具 使用的前系统中必须已经安装了 libreofficelibreoffice已翻译的用户界面语言包: 中文 (简体)libreoffice离线帮助文档: 中文 (简体)上传字体 重点:重点:重点: 亲…...
【数据结构OJ题】设计循环队列
原题链接:https://leetcode.cn/problems/design-circular-queue/ 1. 题目描述 2. 循环队列的概念和结构 为充分利用向量空间,克服"假溢出"现象的方法是:将向量空间想象为一个首尾相接的圆环,并称这种向量为循环向量。…...

Java 中创建对象有哪些方式?
目录 面试回答 使用 new 关键字 使用反射机制 使用 Class 类的 newInstance() 方法 使用 Constructor 类的 newInstance 方法 使用 clone 方法 使用反序列化 使用方法句柄 使用 Unsafe 分配内存 面试回答 使用 new 关键字 这是我们最常用的、也是最简单的创建对象的方…...

Kafka 消息发送和消费流程
发送消息 流程如下: Producer 端直接将消息发送到 Broker 中的 Leader 分区中Broker 对应的 Leader 分区收到消息会先写入 Page Cache,定时刷盘进行持久化(顺序写入磁盘)Follower 分区拉取 Leader 分区的消息,并保持…...
)
UVa10048 Audiophobia(floyd)
题意 给出一个图,图中的边表示从点u到点v路径上的噪音。给出q个查询,问从u到v所经路径上的最小噪音 思路 在使用floyd计算点对之间的路径时, D u , v k m i n { D u , v k − 1 , m a x { D u , k k − 1 , D k , v k − 1 } } D_{u, v}^…...

Redis概述
目录 Redis - 概述 使用场景 如何安装 Window 下安装 Linux 下安装 docker直接进行安装 下载Redis镜像 Redis启动检查常用命令 Redis - 概述 redis是一款高性能的开源NOSQL系列的非关系型数据库,Redis是用C语言开发的一个开源的高键值对(key value)数据库,官方提供测试…...

MsrayPlus多功能搜索引擎采集软件
MsrayPlus多功能搜索引擎采集软件 摘要: 本文介绍了一款多功能搜索引擎软件-MsrayPlus,该软件能够根据关键词从搜索引擎中检索相关数据,并提供搜索引擎任务、爬虫引擎任务和联系信息采集三大功能。我们将分析该软件在不同领域的应用…...
机器学习之概率论
最近,在了解机器学习相关的数学知识,包括线性代数和概率论的知识,今天,回顾了概率论的知识,贴上几张其他博客的关于概率论的图片,记录学习过程。...

【深度学习 | 数据可视化】 视觉展示分类边界: Perceptron模型可视化iris数据集的决策边界
🤵♂️ 个人主页: AI_magician 📡主页地址: 作者简介:CSDN内容合伙人,全栈领域优质创作者。 👨💻景愿:旨在于能和更多的热爱计算机的伙伴一起成长!!&…...
【计算机视觉】相机基本知识(还在更新)
1.面阵工业相机与线阵工业相机 1.1 基本概念区别 面阵相机则主要采用的连续的、面状扫描光线来实现产品的检测; 线阵相机即利用单束扫描光来进行物体扫描的工作的。 1.2 优缺点 (1)面阵CCD工业相机: 优点:应用面…...
(类嵌套时,成员函数以及类声明定义的顺序)小demo)
C++ (友元)(类嵌套时,成员函数以及类声明定义的顺序)小demo
#include<iostream> using namespace std; class Building; //1.因为Goodgay类需要声明Building类变量, //所以Building类必须Goodgay类之前声明(前向声明); class GoodGay { public:GoodGay();void visit(); private:Build…...

前端实习第五周周记
前言 每一天做了什么还是要记录一下,不然过两天后就会发现,慢慢遗忘自己的收获与做过的东西。 这周做的是医学检验系统的样本库部分。由于是公司的代码所以不能交代具体,那么久聊一下每天具体做了些什么以及我的一些收获。 周一 周一上午…...

【图论】Floyd算法
一.简介 Floyd算法,也称为Floyd-Warshall算法,是一种用于解决所有节点对最短路径问题的动态规划算法。它可以在有向图或带权图中找到任意两个节点之间的最短路径。 Floyd算法的基本思想是通过中间节点逐步优化路径长度。它使用一个二维数组来存储任意两…...
ceph数据分布
ceph的存储是无主结构,数据分布依赖client来计算,有两个条主要路径。 1、数据到PG 2、PG 到OSD 有两个假设: 第一,pg的数量稳定,可以认为保持不变; 第二, OSD的数量可以增减,OSD的…...

别再让MCSDK电流环PI参数拖后腿了!手把手教你从电机参数到代码配置的完整调参流程
从电机参数到代码实现:MCSDK电流环PI参数优化实战指南 在电机控制领域,电流环的性能直接影响着整个系统的响应速度、稳定性和能效表现。许多工程师在使用STM32的MCSDK进行FOC开发时,往往满足于"电机能转"的基本状态,却忽…...

一键捕获完整网页:Full Page Screen Capture 高效解决方案
一键捕获完整网页:Full Page Screen Capture 高效解决方案 【免费下载链接】full-page-screen-capture-chrome-extension One-click full page screen captures in Google Chrome 项目地址: https://gitcode.com/gh_mirrors/fu/full-page-screen-capture-chrome-e…...

光流法在气象雷达中的应用:从原理到外推实践
光流法在气象雷达中的应用:从原理到外推实践 气象雷达作为现代气象监测的核心工具,其回波数据蕴含着丰富的天气系统动态信息。如何从这些看似静态的图像序列中提取运动规律,进而预测未来短时内的天气变化,一直是气象学界和工程界关…...

5分钟上手Vane容器化部署:从零搭建隐私优先的AI搜索引擎
5分钟上手Vane容器化部署:从零搭建隐私优先的AI搜索引擎 【免费下载链接】Vane Vane is an AI-powered answering engine. 项目地址: https://gitcode.com/GitHub_Trending/pe/Vane 想要在5分钟内搭建一个功能强大的AI搜索引擎吗?Vane是一个专注于…...

告别水印烦恼!3步轻松去水印,新手秒上手。
找到心仪的图片有水印、做设计好不容易找到的素材有水印、下载好看的壁纸有水印,遇到的好图全被水印扫兴?PS去水印,操作复杂,学习成本高,浪费时间;用专业去水印工具,收费昂贵,还有广…...

YOLOv5+Swin-Tiny实战:在自定义数据集上提升小目标检测精度的完整流程
YOLOv5与Swin-Tiny融合实战:工业级小目标检测优化指南 在无人机巡检、遥感监测和工业质检等场景中,小目标检测一直是计算机视觉领域的棘手挑战。传统卷积神经网络(CNN)在处理这类任务时,往往难以兼顾感受野与计算效率的平衡。本文将带您探索如…...

Z-Image-Turbo-rinaiqiao-huiyewunv实战落地:高校动漫社AI辅助创作工作流搭建
Z-Image-Turbo-rinaiqiao-huiyewunv实战落地:高校动漫社AI辅助创作工作流搭建 1. 项目背景与核心价值 高校动漫社团经常面临创作效率低、人手不足的问题。传统手绘方式需要大量时间,而通用AI绘图工具又难以保持角色一致性。Z-Image Turbo (辉夜大小姐-…...
)
香橙派Armbian系统下,用apt一键安装OpenCV的完整流程(含GPG报错解决)
香橙派Armbian系统下OpenCV-Python极简安装指南:绕过源码编译的终极方案 在单板计算机领域,香橙派凭借其出色的性价比逐渐崭露头角。当开发者尝试在这类ARM架构设备上构建计算机视觉应用时,OpenCV往往是不可或缺的核心工具。然而,…...
)
告别‘夜盲症’:用Python+OpenCV手把手教你实现红外与可见光图像融合(附完整代码)
实战指南:PythonOpenCV实现红外与可见光图像融合技术 夜间监控画面总是模糊不清?自动驾驶系统在低光照环境下识别率骤降?这些问题本质上都是"视觉夜盲症"的表现。今天我们将用最实用的方式,带你用Python和OpenCV构建一个…...

BurpSuite导入P12证书遇到密码问题?3种无密码解决方案实测
BurpSuite导入P12证书遇到密码问题?3种无密码解决方案实测 在企业安全测试和渗透评估过程中,客户端证书认证是常见的防护机制。当BurpSuite提示需要P12证书密码而您又无法获取时,整个测试流程可能陷入僵局。本文将分享三种经过实战验证的解决…...