【2023新教程】树莓派定时自动拍照并上传腾讯云对象存储COS
1 换源
仅适用于Release date: May 3rd 2023、Debian version: 11 (bullseye)这个树莓派OS版本,其他版本不保证有效。
首先使用如下命令,查看自己树莓派的架构。
uname -a
结果如下:

如果红圈处显示为aarch64,使用命令sudo nano /etc/apt/sources.list,注释掉里面的所有内容,加入以下内容:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye main contrib non-free
# deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye main contrib non-freedeb https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-updates main contrib non-free
# deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-updates main contrib non-freedeb https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-backports main contrib non-free
# deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-backports main contrib non-free# deb https://mirrors.tuna.tsinghua.edu.cn/debian-security bullseye-security main contrib non-free
# # deb-src https://mirrors.tuna.tsinghua.edu.cn/debian-security bullseye-security main contrib non-freedeb https://security.debian.org/debian-security bullseye-security main contrib non-free
# deb-src https://security.debian.org/debian-security bullseye-security main contrib non-free
然后保存。
如果红圈处显示armv7l,则使用命令sudo nano /etc/apt/sources.list,注释掉里面的所有内容,加入以下内容:
deb https://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ bullseye main non-free contrib rpi
# deb-src https://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ bullseye main non-free contrib rpi# deb [arch=arm64] https://mirrors.tuna.tsinghua.edu.cn/raspbian/multiarch/ bullseye main
注意两者不可同时选择。
做完上述步骤后,使用命令sudo nano /etc/apt/sources.list.d/raspi.list ,注释掉里面的所有内容,输入以下内容:
deb https://mirrors.tuna.tsinghua.edu.cn/raspberrypi/ bullseye main
然后保存。
执行sudo apt-get update.
2 安装OpenCV
使用命令sudo apt-get install python-opencv -y安装OpenCV。
3 编写代码
在/home/pi下创建project文件夹,在该文件夹中再创建文件夹中创建img文件夹、code.py文件。
在code.py文件中写入以下内容:
# -*- coding=utf-8
import time
import datetime #日期时间
import os #文件操作
import cv2 #opencv-python
from qcloud_cos import CosConfig
from qcloud_cos import CosS3Client
import sys
import os
import logging# 正常情况日志级别使用 INFO,需要定位时可以修改为 DEBUG,此时 SDK 会打印和服务端的通信信息
logging.basicConfig(level=logging.INFO, stream=sys.stdout)# 1. 设置用户属性, 包括 secret_id, secret_key, region等。Appid 已在 CosConfig 中移除,请在参数 Bucket 中带Appid。Bucket 由 BucketName-Appid 组成
secret_id = '你的ID' # 用户的 SecretId,建议使用子账号密钥,授权遵循最小权限指引,降低使用风险。子账号密钥获取可参见 https://cloud.tencent.com/document/product/598/37140
secret_key = '你的key' # 用户的 SecretKey,建议使用子账号密钥,授权遵循最小权限指引,降低使用风险。子账号密钥获取可参见 https://cloud.tencent.com/document/product/598/37140
region = 'ap-guangzhou' # 替换为用户的 region,已创建桶归属的 region 可以在控制台查,https://console.cloud.tencent.com/cos5/bucket# COS 支持的所有 region 列表参见 https://cloud.tencent.com/document/product/436/6224
token = None # 如果使用永久密钥不需要填入 token,如果使用临时密钥需要填入,临时密钥生成和使用指引参见 https://cloud.tencent.com/document/product/436/14048
scheme = 'https' # 指定使用 http/https 协议来访问 COS,默认为 https,可不填config = CosConfig(Region=region, SecretId=secret_id, SecretKey=secret_key, Token=token, Scheme=scheme)
client = CosS3Client(config)camera = cv2.VideoCapture(0) #一个摄像头,后期可扩展多个摄像头def delete_imgs():delete_url = "/home/pi/project/img"delete_list = os.listdir(delete_url)#print(delete_list)for i in range(len(delete_list)):os.remove(delete_url+'/'+delete_list[i])logging.info("delete all imgs success!")if camera.isOpened():logging.info("Start Picture!")while True:# 设置分辨率camera.set(3, 1920) #widthcamera.set(4, 1080) #heightret, img = camera.read()date = datetime.datetime.now().strftime("%Y-%m-%d")get_photo_time = datetime.datetime.now().strftime("%Y-%m-%d_%H-%M-%S")#print(get_photo_time)file_path = "/home/pi/regular-photos-of-raspberry-pie/img/" + str(get_photo_time) + ".jpg"cv2.imwrite(file_path,img) #保存到树莓派本地upload_time = datetime.datetime.now().strftime("%Y-%m-%d_%H-%M-%S")#print(upload_time)response = client.upload_file(Bucket='raspberry1-1257204660',LocalFilePath=file_path,Key="getRasberryImgs/"+ date + "/" + str(upload_time)+ ".jpg",PartSize=1,MAXThread=10,EnableMD5=False)os.remove(file_path) #删除树莓派本地已保存文件//有时候因为进程先后,有些图片文件来不及删除#判断img文件中有没有照片,删除掉nums = os.listdir('/home/pi/regular-photos-of-raspberry-pie/img')#删除来不及删除的照片if nums:delete_imgs()# camera.release()time.sleep(3600)
执行上述代码,即可完成每小时拍一张照并上传到腾讯云对象存储COS中。
参考资料
https://blog.csdn.net/weixin_46709801/article/details/128045344
相关文章:
【2023新教程】树莓派定时自动拍照并上传腾讯云对象存储COS
1 换源 仅适用于Release date: May 3rd 2023、Debian version: 11 (bullseye)这个树莓派OS版本,其他版本不保证有效。 首先使用如下命令,查看自己树莓派的架构。 uname -a结果如下: 如果红圈处显示为aarch64,使用命令sudo na…...

校企合作谋发展 合作共赢谱新篇|云畅科技与湖南民族职业学院签订校企合作协议
产业是经济发展的重要引擎,人才是产业发展的重要资源。为积极探索软件人才培育新路径,共商政产学研协同新机制,8月8日,云畅科技与湖南省民族职业学院教育技术学院软件技术专业签订校企合作协议。 会上,学院副校长王志平…...
vue技术学习
vue快速入门 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>vue快速入门</title> </head> <body> <!--老师解读 1. div元素不是必须的,也可以是其它元素࿰…...
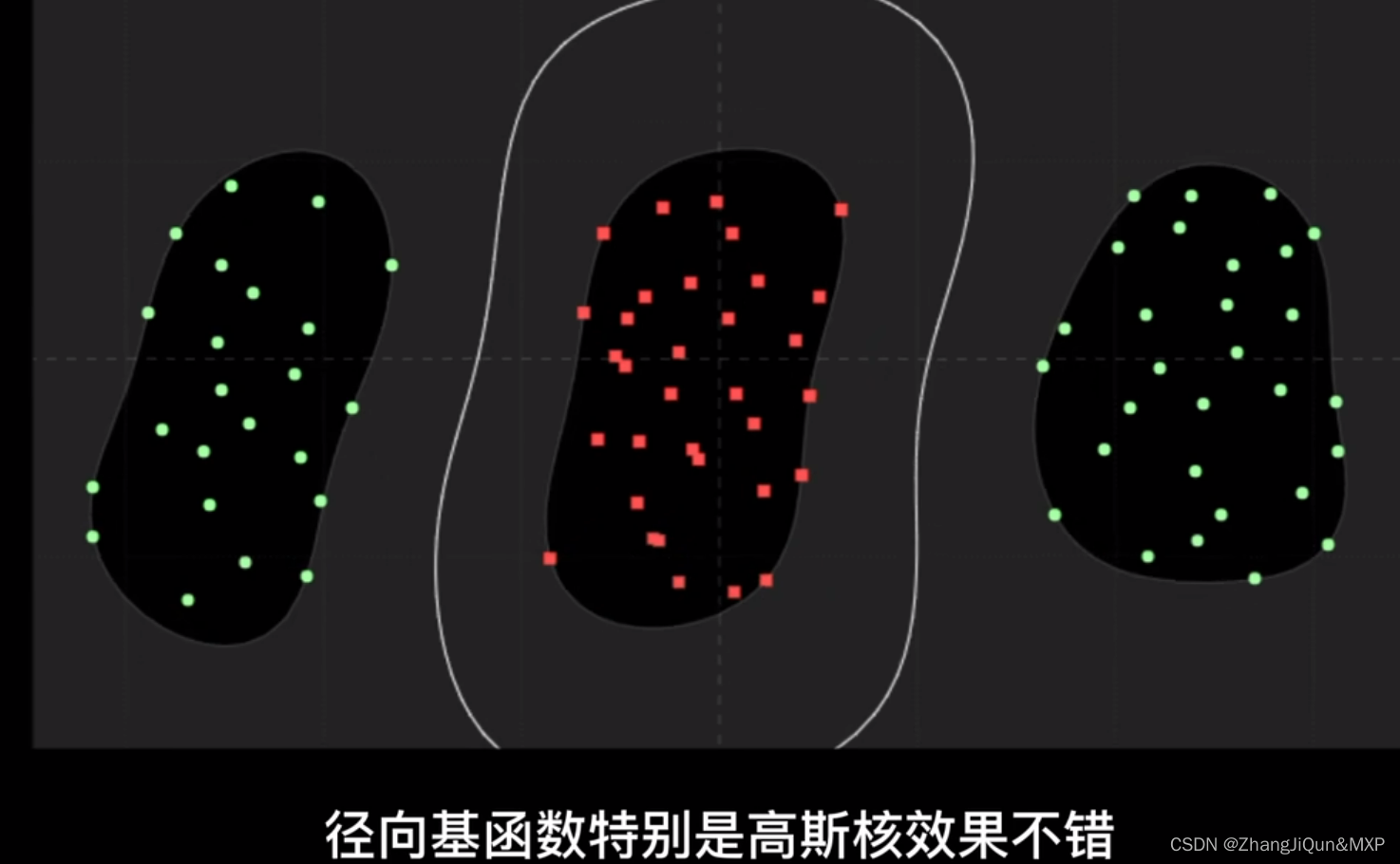
基于空间的图卷积神经网络:GNN
目录 欧氏空间中神经网络发挥巨大最作用,DNA,知识图谱三维或者多维空间不行 邻接矩阵实现图结构的矩阵化表示:造梦师 局和操作实现层内消息传递:带线的连接机传递消息 GCN通过邻域聚合实现特征提取 SVM支持向量机 编辑 硬分…...

.net core发布到IIS上出现 HTTP 错误 500.19
1.检查.net core 环境运行环境是否安装完成,类似如下环境 2.IIS是否安装全 本次原因就是IIS未安装全导致的 按照网上说的手动重启iis(iisreset)也不行...
01_Redis单线程与多线程
01——Redis单线程与多线程 一、Redis是单线程还是多线程 在谈Redis的单线程或多线程时,需要根据版本来区分。 在redis 3.x之前,redis是单线程的从redis 4.x开始,redis引入多线程。处理客户端请求时,使用单线程;在异…...

机器学习——随机森林【手动代码】
随机森林这个内容,是目前来说。。。最最最简单,最好理解,应该也是最好实现的了!!! 先挖坑,慢慢填 随机森林,这个名字取得,果然深得该算法的核心精髓,既随机&a…...
Vue 2 处理边界情况
访问元素和组件 通过Vue 2 组件基础一文的学习,我们知道组件之间可以通过传递props或事件来进行通信。 但在一些情况下,我们使用下面的方法将更有用。 1.访问根实例 根实例可通过this.$root获取。 我们在所有子组件中都可以像上面那样访问根实例&…...

写一个mysql 正则表达式,每三个img标签图片后面添加<hr>
你可以使用MySQL的REGEXP_REPLACE函数来实现这个需求。下面是一个示例的正则表达式和SQL语句: sql UPDATE your_table SET your_column REGEXP_REPLACE(your_column, (<img[^>]*>){3}, $0<hr>) WHERE your_column REGEXP (<img[^>]*>){3}…...
Spring MVC异常处理
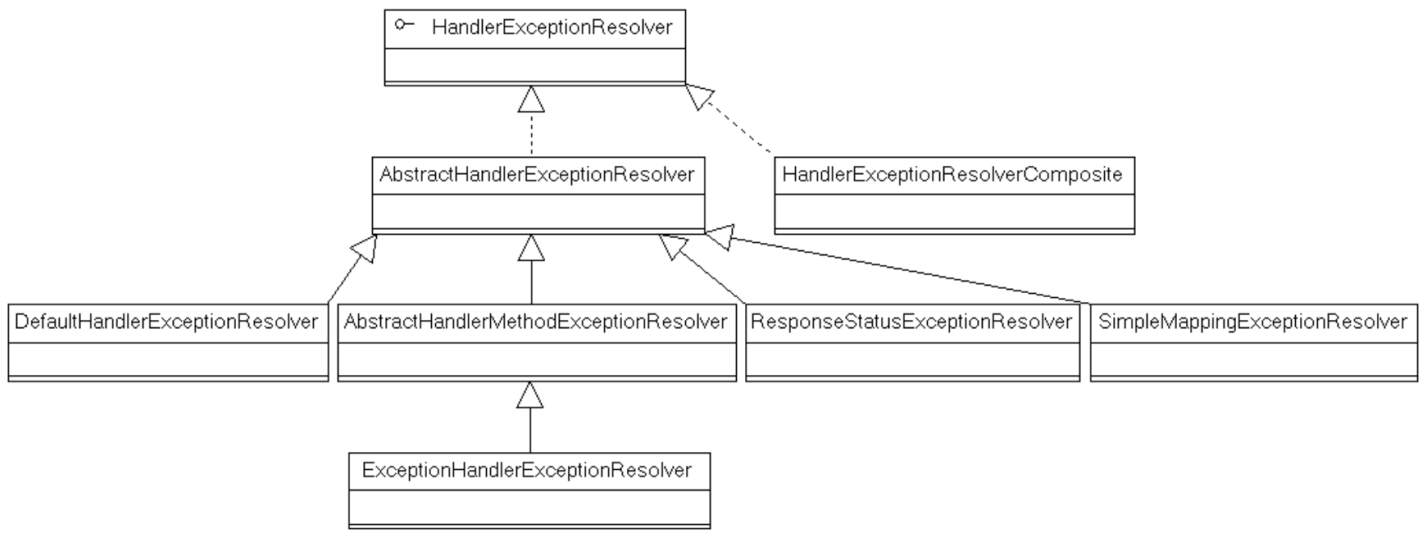
Spring MVC异常处理 Spring MVC异常处理机制HandlerExceptionResolver的实现类DefaultHandlerExceptionResolver实现类DefaultHandlerExceptionResolver 在Controller的请求处理方法中手动使用try…catch块捕捉异常,当捕捉到指定的异常时,系统返回对应的…...

Centos7安装docker后默认开启docker0的网卡|卸载默认网卡
docker实战(一):centos7 yum安装docker docker实战(二):基础命令篇 docker实战(三):docker网络模式(超详细) docker实战(四):docker架构原理 docker实战(五):docker镜像及仓库配置 docker实战(六):docker 网络及数据卷设置 docker实战(七):docker 性质及版本选择 认知升…...
04_Redis与mysql数据双写一致性案例
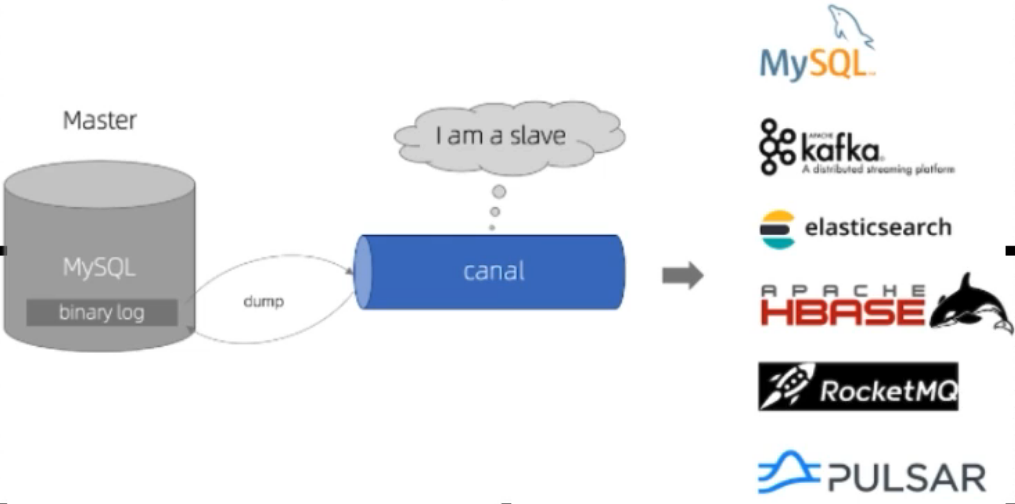
04——redis与mysql数据双写一致性 一、canal 是什么 canal[ka’nel,中文翻译为水道/管道/沟渠/运河,主要用途是用于MySQL数据库增量日志数据的订阅、消费和解析,是阿里巴巴开发并开源的,采用Java语言开发; 历史背景是早期阿里巴巴因为杭州和…...

vue的开发者工具下载『保姆级别』
1.先进官网 极简插件_Chrome扩展插件商店_优质crx应用下载 (zzzmh.cn) 2.搜索vue devtools,点击进去 3.下载插件 4.下载到文件下你自己的文件下:我的是下载到E盘下。 5.压缩到当前目录下 6.电脑进入拓展程序(不同的浏览器操作不同ÿ…...
vue的scrollTop手机环境设置值失效,本地正常可以赋值
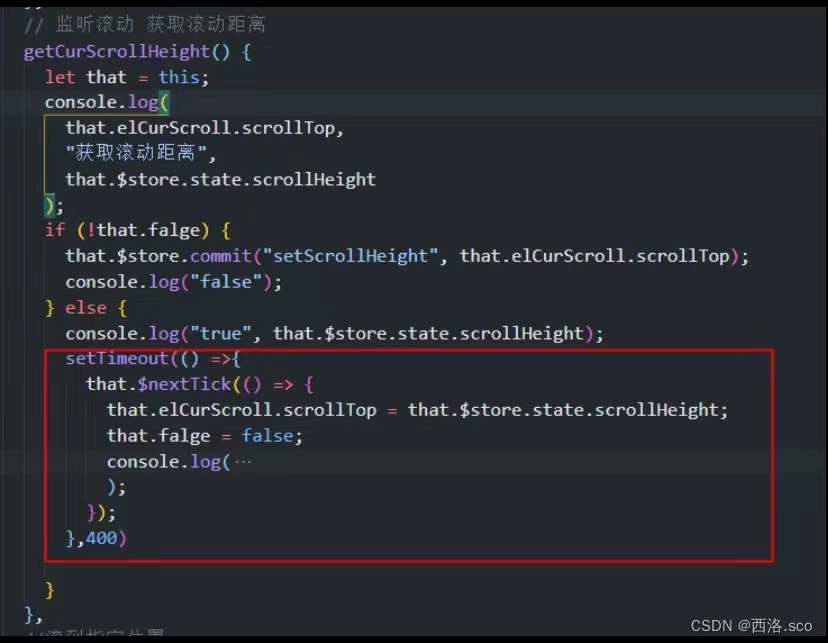
获取div盒子ref或者document获取都行 监听方法 一定要加this.$nexttick,在本地测试只用nexttick是没有问题的,但是到手机测试就不行了,原因是因为手机渲染比本地更快,所以结合setTimeout使用 如果有更好的处理方法,恳请大佬指点一…...

[前端系列第7弹]Vue:一个渐进式的 JavaScript 框架
Vue 是一个用于构建用户界面的 JavaScript 框架,它具有以下特点: 渐进式:Vue 可以根据不同的使用场景,灵活地选择使用库或者框架的方式,从而实现渐进式的开发。响应式:Vue 通过数据绑定和虚拟 DOM 技术&am…...
C#键盘按键对应Keys类大全
...
SpringBoot 学习(03): 弱语言的注解和SpringBoot注解的异同
弱语言代表:Hyperf,一个基于 PHP Swoole 扩展的常驻内存框架 注解概念的举例说明; 说白了就是,你当领导,破烂事让秘书帮你去安排,你只需要批注一下,例如下周要举办一场活动,秘书将方…...
CloudQuery:更好地管理你的 OceanBase 数据库
前言:作为 OceanBase 的生态合作伙伴,CloudQuery(简称“CQ”) 最新发布的社区版 2.2.0 新增了 OceanBase 数据库,为企业使用 OceanBase 数据库提供全面的支持。包括连接与认证、查询与分析、数据安全与权限管理&#x…...

php的password_verify 和 password_hash密码验证
password_hash() 使用足够强度的单向散列算法创建密码的散列(hash)。 当前支持的算法: PASSWORD_DEFAULT - 使用 bcrypt 算法 (PHP 5.5.0 默认)。 注意,该常量会随着 PHP 加入更新更高强度的算法而改变。 所以,使用此常量生成结果的长度将在未…...

JAVA免杀学习与实验
1 认识Webshell 创建一个JSP文件: <% page import"java.io.InputStream" %> <% page import"java.io.BufferedReader" %> <% page import"java.io.InputStreamReader" %> <% page language"java" p…...

5分钟完全指南:roop-unleashed AI换脸神器从入门到精通
5分钟完全指南:roop-unleashed AI换脸神器从入门到精通 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 想要在几分钟内制作专业级的AI换脸视频吗…...

AMD锐龙系统调试工具终极指南:深入掌握SMU、PCI与MSR硬件级调优
AMD锐龙系统调试工具终极指南:深入掌握SMU、PCI与MSR硬件级调优 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: h…...

全球扩张加剧法律复杂性,但仅有7%的企业实现全面合规
• 47%的总法律顾问表示,实际控制人规则对法律运营构成了最大的风险 • 44%的企业对能否满足跨境数据安全要求缺乏信心 随着企业在2026年加速全球扩张,合规工作却未能跟上步伐。事实上,根据全球领先的商业管理与合规解决方案提供商CSC的一项最…...

收藏!AI时代程序员是消失还是逆袭?小白程序员必看大模型逆袭指南
收藏!AI时代程序员是消失还是逆袭?小白程序员必看大模型逆袭指南 文章探讨了AI对程序员行业的影响,指出AI抢走了程序员一半的饭碗,但也为另一半人打开了高阶职场的大门。初级岗位因AI工具普及而面临失业风险,但高级技术…...

为Claude Code配置Taotoken解决账号被封与Token不足的烦恼
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Claude Code配置Taotoken解决账号被封与Token不足的烦恼 对于依赖Claude Code进行编程辅助的开发者来说,直接使用官方…...

Xendit支付网关MCP服务端:东南亚支付集成的架构设计与工程实践
1. 项目概述:一个面向东南亚支付场景的MCP服务端最近在对接东南亚市场的支付业务时,遇到了一个挺有意思的挑战:如何高效、安全地集成Xendit这家东南亚主流的支付网关。Xendit提供的API功能强大,覆盖了印尼、菲律宾等国的多种本地化…...

准备转型AI产品经理的朋友,建议看看这本书
本文从《AI即未来:普通人用好人工智能的18大工作场景》出发,深入探讨了AI大模型的选择、部署及评估。文章指出,面对众多AI工具,应根据任务需求、输出质量、成本等因素进行选择,并强调AI更像助手,需人类监督…...

安卓全局音效处理:RootlessJamesDSP原理、配置与调优实战
1. 项目概述:在移动音频领域实现高自由度音效处理如果你是一名对手机音质有追求的发烧友,或者是一位喜欢折腾系统级音频设置的安卓用户,那么“RootlessJamesDSP”这个名字你很可能不会陌生。简单来说,这是一个无需获取安卓系统最高…...

示波器平均值功能实战:从噪声中精准提取电机故障信号
1. 项目概述:用示波器诊断模型火车电机故障作为一名在电子工程领域摸爬滚打了十几年的老工程师,我手边最离不开的工具,除了万用表,就是示波器。很多人觉得示波器是研发实验室里的高端设备,离日常维修很远,但…...

我写的C语言代码笔记
单链表:#include <stdio.h> #include <stdlib.h>//实现初始化,头插,尾插,删除,输出等单链表的基本操作 typedef struct Node {int data;struct Node* next; }Node;//初始化 Node* intList() {Node* list …...