【ROS】参数服务器--理论模型与参数操作(C++)
一、概念介绍
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
作用:存储一些多节点共享的数据,类似于全局变量。
二、理论模型[Autolabor-ROS]
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
ROS Master (管理者)
Talker (参数设置者)
Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
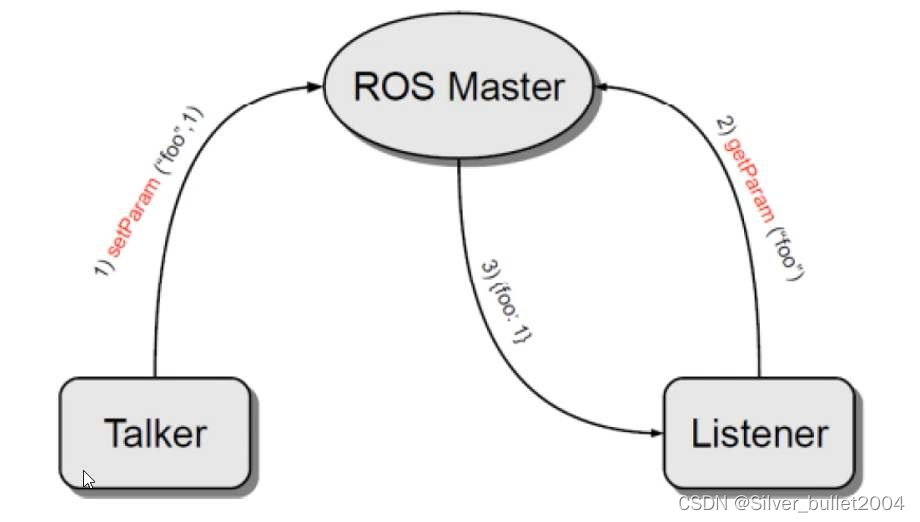
整个流程由以下步骤实现:
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
注意:参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据
三、参数操作(C++)
在 C++ 中实现参数服务器数据的增删改查,均可以通过两套 API 实现:
ros::NodeHandle
ros::param
下面为具体操作演示:
1.参数服务器新增(修改)参数 【增、改】
/*参数服务器操作之新增与修改(二者API一样)_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandlesetParam("键",值)ros::paramset("键","值")示例:分别设置整形、浮点、字符串、bool、列表、字典等类型参数修改(相同的键,不同的值)*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ros::init(argc,argv,"set_update_param");std::vector<std::string> stus;stus.push_back("zhangsan");stus.push_back("李四");stus.push_back("王五");stus.push_back("孙大脑袋");std::map<std::string,std::string> friends;friends["guo"] = "huang";friends["yuang"] = "xiao";//NodeHandle--------------------------------------------------------ros::NodeHandle nh;nh.setParam("nh_int",10); //整型nh.setParam("nh_double",3.14); //浮点型nh.setParam("nh_bool",true); //boolnh.setParam("nh_string","hello NodeHandle"); //字符串nh.setParam("nh_vector",stus); // vectornh.setParam("nh_map",friends); // map//修改演示(相同的键,不同的值)nh.setParam("nh_int",10000);//param--------------------------------------------------------ros::param::set("param_int",20);ros::param::set("param_double",3.14);ros::param::set("param_string","Hello Param");ros::param::set("param_bool",false);ros::param::set("param_vector",stus);ros::param::set("param_map",friends);//修改演示(相同的键,不同的值)ros::param::set("param_int",20000);return 0;
}
2.参数服务器获取参数 【查】
/*参数服务器操作之查询_C++实现:在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandleparam(键,默认值)存在,返回对应结果,否则返回默认值getParam(键,存储结果的变量)存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamCached(键,存储结果的变量)--提高变量获取效率存在,返回 true,且将值赋值给参数2若果键不存在,那么返回值为 false,且不为参数2赋值getParamNames(std::vector<std::string>)获取所有的键,并存储在参数 vector 中hasParam(键)是否包含某个键,存在返回 true,否则返回 falsesearchParam(参数1,参数2)搜索键,参数1是被搜索的键,参数2存储搜索结果的变量ros::param ----- 与 NodeHandle 类似
*/#include "ros/ros.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");ros::init(argc,argv,"get_param");//NodeHandle实现--------------------------------------------------------/*ros::NodeHandle nh;// 1.param 函数int res1 = nh.param("nh_int",100); // 键存在int res2 = nh.param("nh_int2",100); // 键不存在ROS_INFO("param获取结果:%d,%d",res1,res2);// 2.getParam 函数int nh_int_value;double nh_double_value;bool nh_bool_value;std::string nh_string_value;std::vector<std::string> stus;std::map<std::string, std::string> friends;nh.getParam("nh_int",nh_int_value);nh.getParam("nh_double",nh_double_value);nh.getParam("nh_bool",nh_bool_value);nh.getParam("nh_string",nh_string_value);nh.getParam("nh_vector",stus);nh.getParam("nh_map",friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",nh_int_value,nh_double_value,nh_string_value.c_str(),nh_bool_value);for (auto &&stu : stus){ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()nh.getParamCached("nh_int",nh_int_value);ROS_INFO("通过缓存获取数据:%d",nh_int_value);//getParamNames()std::vector<std::string> param_names1;nh.getParamNames(param_names1);for (auto &&name : param_names1){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 nh_int 吗? %d",nh.hasParam("nh_int"));ROS_INFO("存在 nh_intttt 吗? %d",nh.hasParam("nh_intttt"));std::string key;nh.searchParam("nh_int",key);ROS_INFO("搜索键:%s",key.c_str());*///param实现--------------------------------------------------------ROS_INFO("++++++++++++++++++++++++++++++++++++++++");int res3 = ros::param::param("param_int",20); //存在int res4 = ros::param::param("param_int2",20); // 不存在返回默认ROS_INFO("param获取结果:%d,%d",res3,res4);// getParam 函数int param_int_value;double param_double_value;bool param_bool_value;std::string param_string_value;std::vector<std::string> param_stus;std::map<std::string, std::string> param_friends;ros::param::get("param_int",param_int_value);ros::param::get("param_double",param_double_value);ros::param::get("param_bool",param_bool_value);ros::param::get("param_string",param_string_value);ros::param::get("param_vector",param_stus);ros::param::get("param_map",param_friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",param_int_value,param_double_value,param_string_value.c_str(),param_bool_value);for (auto &&stu : param_stus) // &&右值引用{ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : param_friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// getParamCached()ros::param::getCached("param_int",param_int_value);ROS_INFO("通过缓存获取数据:%d",param_int_value);//getParamNames()std::vector<std::string> param_names2;ros::param::getParamNames(param_names2);for (auto &&name : param_names2){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));std::string key;ros::param::search("param_int",key);ROS_INFO("搜索键:%s",key.c_str());return 0;
}
3.参数服务器删除参数 【删】
/* 参数服务器操作之删除_C++实现:ros::NodeHandledeleteParam("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 falseros::paramdel("键")根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false*/
#include "ros/ros.h"int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");ros::init(argc,argv,"delete_param");ros::NodeHandle nh;bool r1 = nh.deleteParam("nh_int");ROS_INFO("nh 删除结果:%d",r1);bool r2 = ros::param::del("param_int");ROS_INFO("param 删除结果:%d",r2);return 0;
}
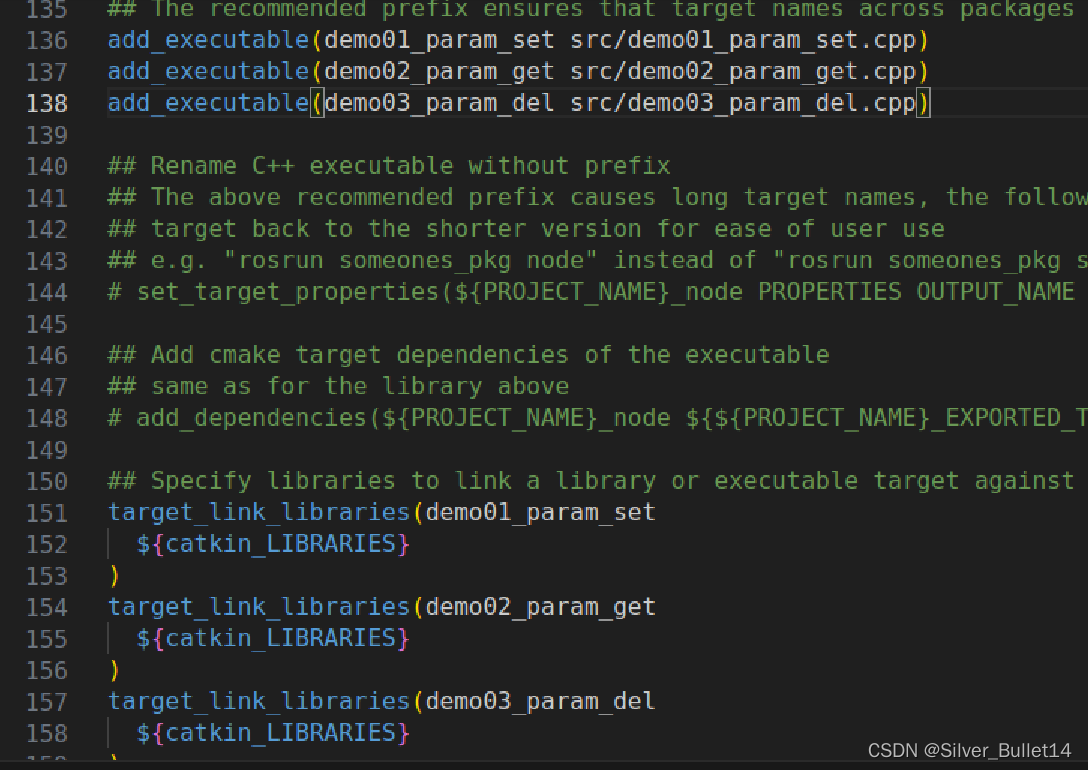
4.配置CMakeList.txt
add_executable(demo01_param_set src/demo01_param_set.cpp)
add_executable(demo02_param_get src/demo02_param_get.cpp)
add_executable(demo03_param_del src/demo03_param_del.cpp)target_link_libraries(demo01_param_set${catkin_LIBRARIES}
)
target_link_libraries(demo02_param_get${catkin_LIBRARIES}
)
target_link_libraries(demo03_param_del${catkin_LIBRARIES}
)
之后编译运行即可,参数服务器相较于之前两个通信机制还是比较简洁的。。。
相关文章:
【ROS】参数服务器--理论模型与参数操作(C++)
一、概念介绍 参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。 作用:存储一些多节点…...
[oneAPI] 基于BERT预训练模型的英文文本蕴含任务
[oneAPI] 基于BERT预训练模型的英文文本蕴含任务 Intel DevCloud for oneAPI 和 Intel Optimization for PyTorch基于BERT预训练模型的英文文本蕴含任务语料介绍数据集构建 模型训练 结果参考资料 比赛:https://marketing.csdn.net/p/f3e44fbfe46c465f4d9d6c23e38e0…...
【洛谷】P1163 银行贷款
原题链接:https://www.luogu.com.cn/problem/P1163 目录 1. 题目描述 2. 思路分析 3. 代码实现 1. 题目描述 2. 思路分析 这题需要注意的是利率按月累计这句话,也就是相当于“利滚利”。 我们定义sum变量表示贷款原值,money表示每月支付…...

Java版工程行业管理系统源码-专业的工程管理软件-提供一站式服务 em
鸿鹄工程项目管理系统 Spring CloudSpring BootMybatisVueElementUI前后端分离构建工程项目管理系统 1. 项目背景 一、随着公司的快速发展,企业人员和经营规模不断壮大。为了提高工程管理效率、减轻劳动强度、提高信息处理速度和准确性,公司对内部工…...
kafka--技术文档--基本docker中安装<单机>-linux
安装zookeeper 阿丹小科普: Kafka在0.11.0.0版本之后不再依赖Zookeeper,而是使用基于Raft协议的Kafka自身的仲裁机制来替代Zookeeper。具体来说,Kafka 2.8.0版本是第一个不需要Zookeeper就可以运行Kafka的版本,这被称为Kafka Raf…...

回归预测 | MATLAB实现WOA-RF鲸鱼优化算法优化随机森林算法多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现WOA-RF鲸鱼优化算法优化随机森林算法多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现WOA-RF鲸鱼优化算法优化随机森林算法多输入单输出回归预测(多指标,多图)效果一览…...
Linux系统安全——NAT(SNAT、DNAT)
目录 NAT SNAT SNAT实际操作 DNAT DNAT实际操作 NAT NAT: network address translation,支持PREROUTING,INPUT,OUTPUT,POSTROUTING四个链 请求报文:修改源/目标IP, 响应报文:修改源/目标…...

uniapp项目添加人脸识别功能,可用作登录,付款,流程审批前的安全校验
本案例使用了hbuilder插件商城中的活体检验插件,可自行前往作者处下载查看, 效果图如下 此插件需要在manifest.json中勾选 实现流程 1:前往hbuilder插件市场下载插件 2:在页面中导入import face from "/uni_modules/mcc-…...

SpringBoot面试题
Spring Boot的启动流程主要分为以下几个步骤: 加载Spring Boot配置文件,初始化Spring Boot环境和核心组件,如ApplicationContext上下文环境、自动装配机制等。 执行SpringApplication.run()方法,执行所有Spring Boot自动配置的Be…...
Git相关命令
SSH密钥文件 Github里面S设置SH公钥有两者选择方式 账号下的每个仓库都设置一个公钥,因为GitHub官方要求每个仓库的公钥都不能相同,所以每个账号都要搞一个密钥(很麻烦)给账号分配一个公钥,然后这个公钥就可以在这个…...
《HeadFirst设计模式(第二版)》第八章代码——模板方法模式
代码文件目录: CaffeineBeverage package Chapter8_TemplateMethodPattern;/*** Author 竹心* Date 2023/8/17**/public abstract class CaffeineBeverage {final void prepareRecipe(){boilWater();brew();pourInCup();//这里使用钩子customerWantsCondiments()来…...

RESTful API,以及如何使用它构建 web 应用程序
RESTful API是一种基于HTTP协议的API设计风格,它的核心思想是将资源作为 API 的核心,使用 HTTP 的 GET、POST、PUT、DELETE 等方法对这些资源进行操作,并通过 URL 来定位资源。 RESTful API的特点包括: 资源是 API 的核心使用 H…...

Git+Gitee使用分享
GitGitee快速入门 创建仓库 初始化本地仓库 验证本地git是否安装好 打开cmd窗口,输入git 这样就OK。 Git 全局设置:(只需要设置一次) 这台电脑如果是第一次使用git,就需要这样初始化一下,这样才知道是谁提交到仓库了。 git confi…...

【3D激光SLAM】LOAM源代码解析--transformMaintenance.cpp
系列文章目录 【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp 【3D激光SLAM】LOAM源代码解析–laserOdometry.cpp 【3D激光SLAM】LOAM源代码解析–laserMapping.cpp 【3D激光SLAM】LOAM源代码解析–transformMaintenance.cpp 写在前面 本系列文章将对LOAM源代码进行讲解…...

DiscuzQ 二开教程(7)——二次开发版本部署文档
DiscuzQ 二开教程(7)——二次开发版本部署文档 源码:Discuz-Q-V3: 本仓库为Discuz-Q V3.0.211111 版本的二次开发版本,是将DiscuzQ官方仓库进行合并代码(All in One)整理后的仓库,使用更方便。…...
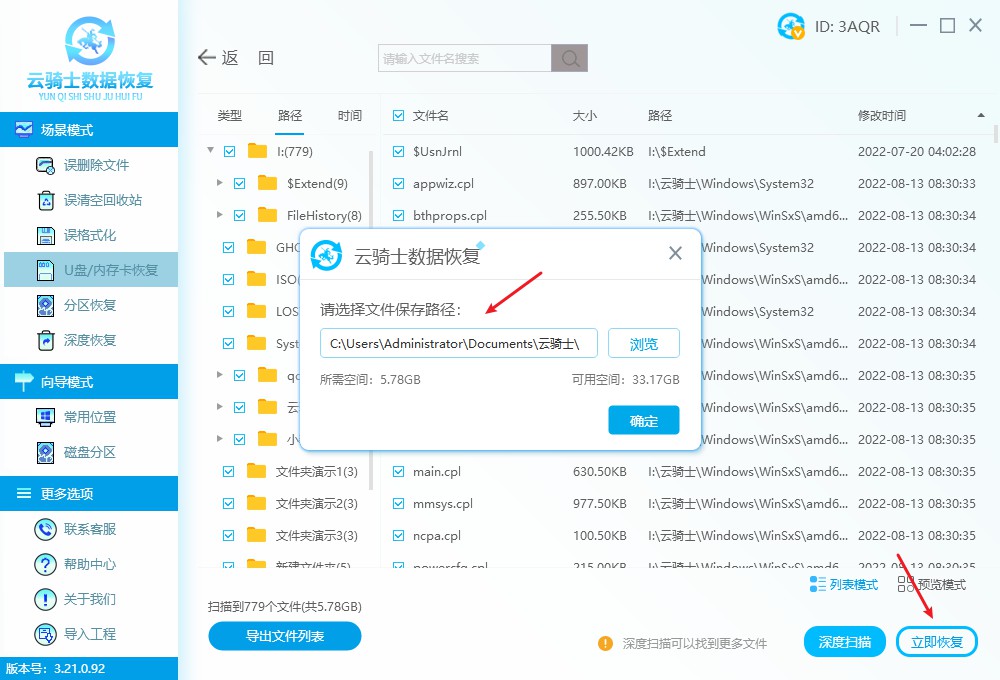
u盘数据丢失但占内存如何恢复?不要着急,这里有拯救方案
U盘数据丢失但占内存如何恢复?数据丢失是一种让人非常头疼的问题,尤其是当我们的U盘数据丢失了,但内存仍然被占用时,更令人困惑和焦虑。然而,不要慌张!在本文中,将为大家介绍一些有效的方法来恢…...

springboot日志文件名称为什么叫logback-spring.xml
如题,为什么springboot日志配置文件叫logback-spring.xml? 在整个项目中搜索 logback-spring.xml 并没有搜索到。 先看一下 org.springframework.boot.context.logging.LoggingApplicationListener#initialize protected void initialize(ConfigurableEn…...
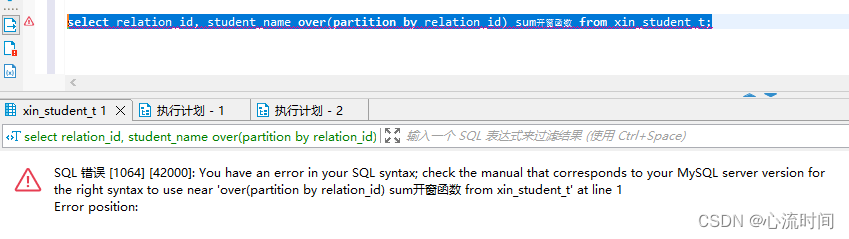
Mysql 开窗函数(窗口函数)
文章目录 全部数据示例1(说明)开窗函数可以比groupby多查出条件列外的字段,开窗函数主要是为了跟聚合函数一起使用,达到分组统计效果,并且开窗函数的结果集基本都是跟总行数一样示例2示例3示例4错误示例1错误示例2错误…...

计算机视觉之图像特征提取
图像特征提取是计算机视觉中的重要任务,它有助于识别、分类、检测和跟踪对象。以下是一些常用的图像特征提取算法及其简介: 颜色直方图(Color Histogram): 简介:颜色直方图表示图像中各种颜色的分布情况。通…...

【面试经典150题】移除元素·JavaScript版
题目来源 大致思路:遍历数组,如果遇到值为val的元素,使用数组最后一个元素替换它。详细过程: /*** param {number[]} nums* param {number} val* return {number}*/ var removeElement function(nums, val) {let i0,nnums.leng…...

告别爬虫:使用trendsmcp API稳定获取多平台趋势数据
1. 项目概述:告别爬虫,拥抱稳定的趋势数据API如果你曾经尝试过用Python抓取Google Trends、新闻提及量或者社交媒体趋势数据,那你一定对“429 Too Many Requests”这个错误代码深恶痛绝。半夜两点,数据管道突然中断,你…...

从零搭建AI增强型第二大脑:NotebookLM+Obsidian+Dataview三体联动,7天知识处理效率提升3.8倍
更多请点击: https://intelliparadigm.com 第一章:NotebookLM与Obsidian整合的底层逻辑与价值定位 NotebookLM 与 Obsidian 的整合并非简单插件叠加,而是基于“语义增强型知识工作流”的范式迁移。其底层逻辑根植于双引擎协同:No…...

AI原生创意协作框架Muse:从网状思维管理到自动化工作流实战
1. 项目概述:一个为创意工作者打造的AI原生工具最近在探索AI辅助创作工具时,我遇到了一个让我眼前一亮的项目:myths-labs/muse。乍一看这个名字,你可能会联想到艺术女神缪斯,而它的定位也确实如此——旨在成为创意工作…...
)
PyTorch预训练模型‘解剖课’:以VGG19为例,彻底搞懂如何自定义输出层(避坑指南)
PyTorch预训练模型‘解剖课’:以VGG19为例,彻底搞懂如何自定义输出层(避坑指南) 当你第一次拿到一个预训练好的VGG19模型,兴奋地准备用它提取图像特征时,却发现自己被卡在了第一步——这个"黑箱"…...

Intel Wi-Fi 6 AX201网卡‘代码10’通病?华硕/戴尔/联想多品牌用户自救指南
Intel Wi-Fi 6 AX201网卡‘代码10’故障全解析与跨品牌解决方案 当你的笔记本突然无法连接Wi-Fi,设备管理器中那个带着黄色感叹号的Intel Wi-Fi 6 AX201网卡图标格外刺眼,显示着"该设备无法启动(代码10)"的提示——这不…...

com0com虚拟串口驱动终极指南:免费创建无限COM端口对,彻底摆脱物理线缆束缚
com0com虚拟串口驱动终极指南:免费创建无限COM端口对,彻底摆脱物理线缆束缚 【免费下载链接】com0com Null-modem emulator - The virtual serial port driver for Windows. Brought to you by: vfrolov [Vyacheslav Frolov](http://sourceforge.net/u/v…...

问卷设计对比实测:手工瞎编≠通用 AI≠学术专用!虎贲等考 AI 重新定义可发表级问卷
在毕业论文、课程论文、期刊实证研究中,问卷是决定数据是否有效、模型能否跑通、论文能否过关的核心一环。但 90% 的学生都在用错误方式做问卷:手工凭感觉出题、网上随便抄量表、用通用 AI 随意生成…… 结果要么信效度不达标,要么数据无法分…...

AI智能体基准测试与差异分析:从评估原理到工程实践
1. 项目概述:当AI智能体学会“自我进化”最近在开源社区里,一个名为agentdiff的项目引起了我的注意。它的名字很有意思,直译过来是“智能体差异”。乍一看,你可能会联想到代码差异对比工具diff,但它的前缀agent又明确指…...

主动学习:让AI主动挑选最有价值的样本进行标注
1. 主动学习:不是AI在“等喂饭”,而是在“主动点菜”你有没有遇到过这种场景:手头有个图像分类项目,标注一张医学影像要花资深放射科医生15分钟,而你手上有5万张未标注CT切片——但预算只够标300张。或者在做客服对话意…...

ACE Awards:电子行业年度创新风向标与工程师成长指南
1. 项目概述:一场属于电子工程师的年度庆典如果你在半导体或电子设计行业待过几年,肯定对“EE Times”和“EDN”这两个名字不陌生。它们就像是电子工程师的“行业圣经”,每天刷一刷,看看又有哪些新芯片发布、哪些技术路线在争论&a…...