RT1052的EPWM
文章目录
- 1 EPWM介绍
- 1.1 引脚
- 1.2 时钟
- 1.3 比较寄存器
- 2 函数
1 EPWM介绍
RT1052 具有 4 个 eFlexPWM(eFlexWM1~eFlex_PWM4)。
- 每个 eFlexPWM 可以产生四路互补 PWM即产生 8 个 PWM,也可以产生相互独立的 PWM 波。四路分别是模块0-3
- 每个 eFlexPWM 具有各自的故障检电路,当故障发生时根据程序锁定 PWM 输出引脚的电平状态。
1.1 引脚
PWM_A 与 PWM_B 可以独立输出也可以作为互补对输出。
- PWM_X 比较特殊,只有 eFlex PWM1 拥有 PWM_X 对应的外部输出引脚可直接输出 PWM。
- eFlexPWM(eFlexWMM2~eFlex_PWM4) 只能通过 XBAR 映射到外部输出引脚才能输出 PWM。
1.2 时钟
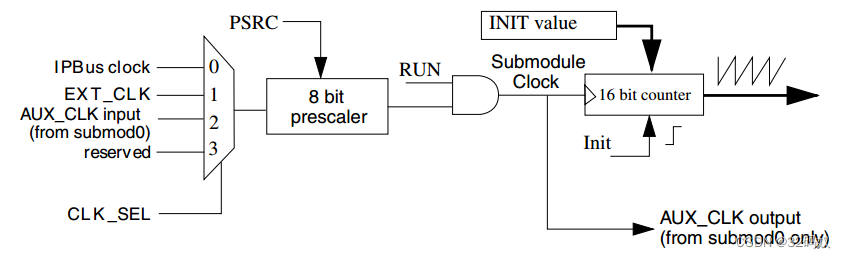 - FLEXPWM 子模块可选的时钟源有 IPBus clock、EXT_CLK。
- FLEXPWM 子模块可选的时钟源有 IPBus clock、EXT_CLK。
- FLEXPWM 子模块 0 还可以选择 AUX_CLK_input 作为时钟源。
1.3 比较寄存器
比较寄存器用于产生 PWM 波,每个 FLEXPWM 拥有 6 个比较寄存器
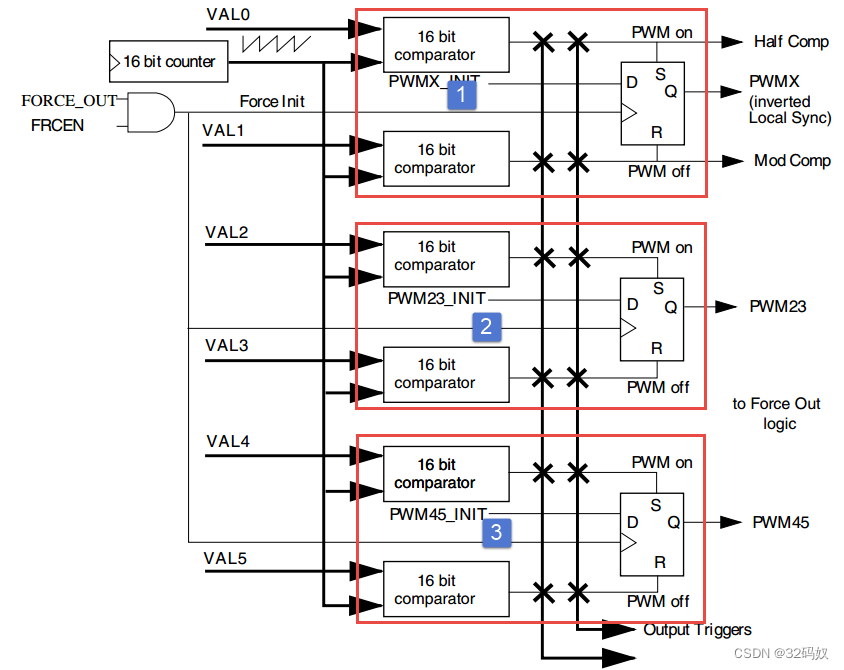
- 第一,只有eFlexPWM1拥有与PWMX直接对应的外部引脚,而其他FLEXPWM
需要使用 XBAR 映射到相应的外部引脚才能输出 PWM。 - 第二,比较寄存 0 和 1 可以输出 HalfComp 信号和 Mod Comp 信号,这两个信号可用作 eFlexPWM1 寄存器加载信号。
- 比较寄存器 2 和 3 用于产生 PWM23
- 比较寄存器 4 和 5 用于产生 PWM45
- 根据寄存器配置不同,PWM23 和 PWM45 可以独立输出,也可以组成一对互补的 PWM 波
2 函数
CLOCK_SetDiv(kCLOCK_AhbDiv, 0x2); /* Set AHB PODF to 2, divide by 3 */CLOCK_SetDiv(kCLOCK_IpgDiv, 0x3); /* Set IPG PODF to 3, divede by 4 */
CLOCK_SetDiv
/* Set the PWM Fault inputs to a low value */XBARA_Init(XBARA1);XBARA_SetSignalsConnection(XBARA1, kXBARA1_InputLogicHigh, kXBARA1_OutputFlexpwm1Fault0);XBARA_SetSignalsConnection(XBARA1, kXBARA1_InputLogicHigh, kXBARA1_OutputFlexpwm1Fault1);XBARA_SetSignalsConnection(XBARA1, kXBARA1_InputLogicHigh, kXBARA1_OutputFlexpwm1234Fault2);XBARA_SetSignalsConnection(XBARA1, kXBARA1_InputLogicHigh, kXBARA1_OutputFlexpwm1234Fault3);
XBAR函数
typedef enum _pwm_chnl_pair_operation
{kPWM_Independent = 0U, /*!< PWM A & PWM B operate as 2 independent channels */kPWM_ComplementaryPwmA, /*!< PWM A & PWM B are complementary channels, PWM A generates the signal */kPWM_ComplementaryPwmB /*!< PWM A & PWM B are complementary channels, PWM B generates the signal */
} pwm_chnl_pair_operation_t;
模式配置。 A产生信号,B互补等。
PWM_Init(PWM2,kPWM_Module_3,&pwm2sm3_config); //初始化PWM2模块3
模块初始化
/* Call the init function with demo configuration */PWM_DRV_Init3PhPwm();
初始化PWM波的配置
//设置PWM2,中央对齐模式
PWM_SetupPwm(PWM2,kPWM_Module_3,&pwm_ignal,2,kPWM_CenterAligned,fre,sourceclock);//使用了两个通道PWM_SetPwmLdok(PWM2,kPWM_Control_Module_3,true); //设置PWM的load ok位
PWM_StartTimer(PWM2,kPWM_Control_Module_3); //开启定时器
kPWM_CenterAligned 中央对齐模式
/* Update duty cycles for all 3 PWM signals */PWM_UpdatePwmDutycycle(BOARD_PWM_BASEADDR, kPWM_Module_0, kPWM_PwmA, kPWM_SignedCenterAligned, pwmVal);PWM_UpdatePwmDutycycle(BOARD_PWM_BASEADDR, kPWM_Module_1, kPWM_PwmA, kPWM_SignedCenterAligned, (pwmVal >> 1));PWM_UpdatePwmDutycycle(BOARD_PWM_BASEADDR, kPWM_Module_2, kPWM_PwmA, kPWM_SignedCenterAligned, (pwmVal >> 2));/* Set the load okay bit for all submodules to load registers from their buffer */PWM_SetPwmLdok(BOARD_PWM_BASEADDR, kPWM_Control_Module_0 | kPWM_Control_Module_1 | kPWM_Control_Module_2, true);
占空比更新。
相关文章:
RT1052的EPWM
文章目录 1 EPWM介绍1.1 引脚1.2 时钟1.3 比较寄存器 2 函数 1 EPWM介绍 RT1052 具有 4 个 eFlexPWM(eFlexWM1~eFlex_PWM4)。 每个 eFlexPWM 可以产生四路互补 PWM即产生 8 个 PWM,也可以产生相互独立的 PWM 波。四路分别是模块0-3每个 eFlexPWM 具有各自的故障检…...
k8s 安装istio (一)
前置条件 已经完成 K8S安装过程十:Kubernetes CNI插件与CoreDNS服务部署 部署 istio 服务网格与 Ingress 服务用到了 helm 与 kubectl 这两个命令行工具,这个命令行工具依赖 ~/.kube/config 这个配置文件,目前只在 kubernetes master 节点中…...

vue 项目在编译时,总是出现系统崩的状态,报错信息中有v7 或者 v8 的样式-项目太大内存溢出
vue 项目在编译时,总是出现系统崩的状态,node 命令框也会报错,如下图:有v7 或者 v8 的样式。 原因分析: 分析:遇到与上面图片相似的问题,我们要首先要想到是否是 有关内存的问题,当然…...

低功耗蓝牙射频指纹识别
射频指纹 射频指纹是什么 射频指纹是一种利用无线电信号的特征来识别设备或用户的技术。射频指纹可以用来做设备身份认证、位置跟踪、安全防护等应用。射频指纹的优点是难以伪造、不依赖于额外的硬件或软件、适用于多种无线通信协议。 射频指纹识别流程 射频指纹识别的一般…...

怎么检测UI卡顿?(线上及线下)
什么是UI卡顿? 在Android系统中,我们知道UI线程负责我们所有视图的布局,渲染工作,UI在更新期间,如果UI线程的执行时间超过16ms,则会产生丢帧的现象,而大量的丢帧就会造成卡顿,影响用…...
Git 常用操作
一、Git 常用操作 1、切换分支 git checkout命令可以用于三种不同的实体:文件,commit,以及分支。checkout的意思就是对于一种实体的不同版本之间进行切换的操作。checkout一个分支,会更新当前的工作空间中的文件,使其…...

前端修改新增操作导致数据删除——js精度丢失
问题描述 笔者在写前端渲染表格的时候,发现无论是修改还是新增,数据都会被删除。检查了前端逻辑并与后端联调均无问题。 然后就开始和后端一起对数据库,结果发现,十几位的id,接收过来的时候,尾数均变为了…...

winform使用usercontrol 构建了一个复杂的列表,列表速度慢该如何优化?
当使用 WinForms 构建复杂的列表时,可能会面临性能问题,特别是在数据量大或 UI 复杂的情况下。以下是一些优化策略,可以帮助您改善列表的性能: 1. **虚拟模式 (Virtual Mode)**:对于大型数据集,考虑使用虚…...

Lnton羚通算法算力云平台如何在OpenCV-Python中使用cvui库创建复选框
CVUI 之 复选框 Python import numpy as np import cv2 import cvuidef checkbox_test():WINDOW_NAME Checkbox-Testchecked [False]# 创建画布frame np.zeros((300, 400, 3), np.uint8)# 初始化窗口cvui.init(WINDOW_NAME)while True:# 画布填色frame[:] (100, 200, 100…...
中项系统集成项目管理知识点汇总
中项系统集成项目管理知识点汇总 一、成本-进度二、十大管理及47个过程三、质量四、人力资源五、风险六、干系人沟通七、案例分析万能答案八、选择题知识点九、十大管理输入输出工具技术总结十大管理工具技术总结 一、成本-进度 针对进度滞后的绩效情况 /缩短工期,可…...

Docker容器:docker基础及网络
Docker容器:docker基础及安装 一.docker容器概述 1.什么是容器 (1)Docker是在Linux容器里运行应用的开源工具,是一种轻量级的“虚拟机”。 (2)是一个开源的应用容器引擎,基于go语言开发并遵…...
Django实现音乐网站 ⑿
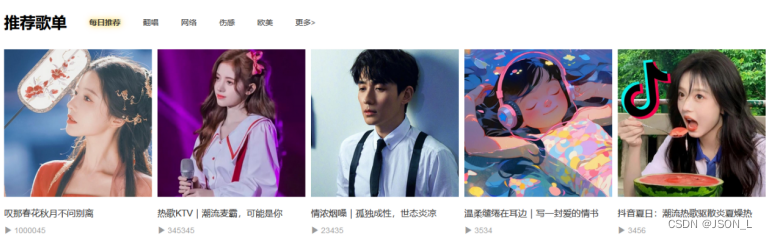
使用Python Django框架制作一个音乐网站, 本篇主要是加载静态资源和推荐页-轮播图、推荐歌单功能开发。 目录 加载静态资源 引入jquery.js 引入bootstrap资源文件 创建基类模板样式文件 推荐页开发 轮播图开发 下载 加载swiper 自定义引入继承块设置 使用…...
ORB-SLAM2学习笔记10之图像关键帧KeyFrame
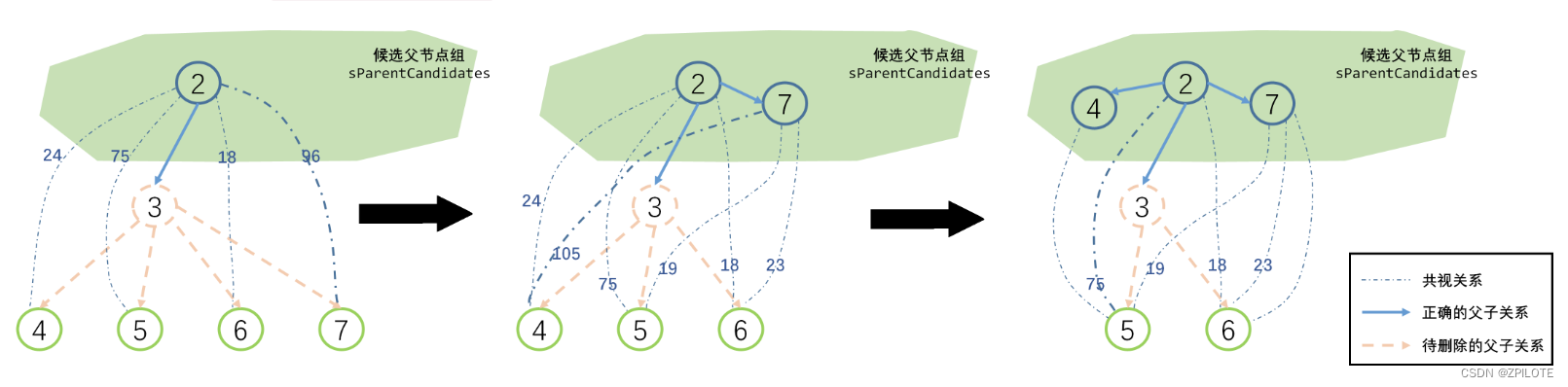
文章目录 0 引言1 KeyFrame类1.1 构造函数1.2 成员函数1.3 关键帧之间共视图1.3.1 AddConnection1.3.2 UpdateBestCovisibles1.3.3 UpdateConnections1.3.4 EraseConnection1.3.5 SetBadFlag 1.4 地图点1.5 生成树 2 KeyFrame用途 0 引言 ORB-SLAM2学习笔记7详细了解了System主…...
【ownCloud】添加信任域
在我进行使用mysql:5.6和 owncloud 镜像,构建一个个人网盘后 我的虚拟机更改了ip地址导致出现下列状况 报错:您正在访问来自不信任域名的服务器。 please contact your administrator. if you are an administrator of this instance, configure the &q…...

C++--类型转换
1.什么是类型转换 在传统C语言中,由强制类型转换和隐式类型转换,隐式类型转换,编译器在在编译阶段自动处理,能转换则转换,强制类型转换由用户自己转换。 缺陷: 转换的可视性比较差,所有的转换形…...

在服务器上部署 Nginx 并设置图片服务器
问题:我要指定/home/images专门存放图片!该怎么做,而且我的系统是centos8系统,只有一个root用户,用root用户已经安装了nginx 答案: 既然你使用了 CentOS 8,并且你想使用 /home/images 目录存放…...
使用NXP GUI GUIDER生成的GUI移植到雅特力MCU平台过程详解(ST/GD/国民/极海通用)
好记性不如烂笔头,既然不够聪明,就乖乖的做笔记,温故而知新。 本文档用于本人对知识点的梳理和记录 一、前言 上一篇我们有介绍NXP GUI Guider工具如何制作和调试GUI,GUI神器 NXP GUI GUIDER开发工具入门教程https://blog.csdn.n…...
JVM——配置常用参数,GC调优策略
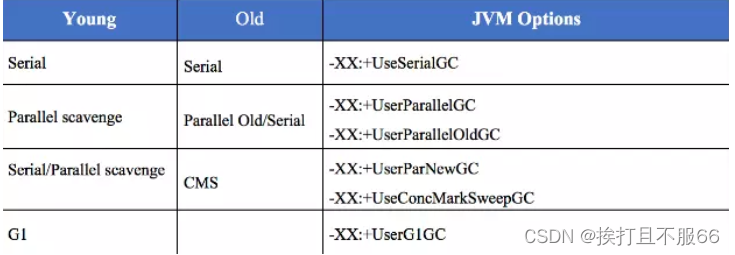
文章目录 JVM 配置常用参数Java内存区域常见配置参数概览堆参数回收器参数项目中常用配置常用组合 常用 GC 调优策略GC 调优原则GC 调优目的GC 调优策略 JVM 配置常用参数 Java内存区域常见配置参数概览堆参数;回收器参数;项目中常用配置;常…...

使用IDEA把Java程序打包成jar
点击左上角File,选择Project Structure 左侧选中Artifacts,点击右侧的号 选择JAR->From modules with dependencies 选择你要运行的main方法所在的类,选好了点击OK Artifacts添加完成后点击右下角OK 在工具栏中找到Build,选择Build Artifacts 刚才创建好的Artifacts,选择Bui…...

元宇宙和数字孪生的异同探究
元宇宙和数字孪生,作为两个备受瞩目的概念,都在不同领域引起了巨大的关注。虽然它们都涉及数字化世界的构建,但元宇宙和数字孪生在概念、应用和影响方面存在一些异同点。 相似之处: 数字表示: 元宇宙和数字孪生都依赖…...

从Gamma函数到泊松分布:一个概率论中的含参量积分实用案例解析
Gamma函数与泊松分布:概率论中的数学之美 在数据科学和机器学习的实践中,概率分布构成了建模的基石。当我们深入探究这些分布背后的数学原理时,Gamma函数以其优雅的性质和广泛的应用脱颖而出。它不仅连接了离散与连续概率世界,更在…...

Python基础语法:常用内置函数
round():四舍五入 # 省略 ndigits print(round(3.14)) # 输出 3(int) print(round(3.66)) # 输出 4# 指定 ndigits print(round(3.14159, 2)) # 输出 3.14(float) print(round(3.666, 2)) # 输出 3.67# …...

基于声卡与电流互感器的安全交流功率测量系统设计与实践
1. 项目概述:用声卡安全测量交流功率我一直对各种测量技术抱有浓厚的兴趣,毕竟“测量即认知”这句老话在今天依然适用。对于电力消耗和产出,没有什么比直接测量更能说明问题了。交流功率的测量,核心在于同时获取电压和电流的瞬时值…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

探索Windows 10上的Android世界:揭秘WSA-Windows-10项目的3个技术突破
探索Windows 10上的Android世界:揭秘WSA-Windows-10项目的3个技术突破 【免费下载链接】WSA-Windows-10 This is a backport of Windows Subsystem for Android to Windows 10. 项目地址: https://gitcode.com/gh_mirrors/ws/WSA-Windows-10 想象一下&#…...

十年以上经验的建站公司推荐|策划强、落地稳的网站制作公司盘点
互联网时代,企业官网已从单纯的信息展示窗口升级为集品牌价值传递、用户体验连接与业务高效转化于一体的核心数字阵地。行业报告显示,优质官网可帮助企业线上转化率提升35%-60%,而低效官网则可能导致潜在客户大量流失。面对市场上众多的网站建…...

告别DLL缺失烦恼!Visual C++运行库合集一键搞定Windows应用依赖问题
告别DLL缺失烦恼!Visual C运行库合集一键搞定Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经在打开某个软件或游戏时…...

DeepSeek重复代码识别失效了?5个被90%团队忽略的AST解析盲区及修复清单
更多请点击: https://codechina.net 第一章:DeepSeek代码重复检测失效的真相与影响 DeepSeek-R1 模型在代码理解任务中表现出色,但其内置的代码重复检测机制在特定场景下存在系统性失效。根本原因在于模型对语义等价但语法结构差异显著的代…...

LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案
LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案 【免费下载链接】LDBlockShow LDBlockShow: a fast and convenient tool for visualizing linkage disequilibrium and haplotype blocks based on VCF files 项目地址: https://gitcode.com/gh_mirror…...

如何扩展GASShooter:添加新武器、新能力与新游戏机制的终极指南
如何扩展GASShooter:添加新武器、新能力与新游戏机制的终极指南 【免费下载链接】GASShooter Advanced FPS/TPS Sample Project for Unreal Engine 4s GameplayAbilitySystem plugin 项目地址: https://gitcode.com/gh_mirrors/ga/GASShooter GASShooter是Un…...