Unity 之 Transform.Translate 实现局部坐标系中进行平移操作的方法
文章目录
- Translate 默认使用局部坐标
- 也可以转换成世界坐标

Translate 默认使用局部坐标
在Unity中,Transform.Translate是用于在游戏对象的局部坐标系中进行平移操作的方法。这意味着它将游戏对象沿着其自身的轴进行移动,而不是世界坐标轴。这在实现物体移动、相机跟随、用户交互等方面非常有用。
以下是一个使用Translate方法的示例代码,附带详细的注释:
using UnityEngine;public class TranslateExample : MonoBehaviour
{public float speed = 5f; // 移动速度private void Update(){// 获取用户输入的方向float horizontalInput = Input.GetAxis("Horizontal");float verticalInput = Input.GetAxis("Vertical");// 计算移动方向Vector3 moveDirection = new Vector3(horizontalInput, 0f, verticalInput);// 使用 Translate 方法进行平移transform.Translate(moveDirection * speed * Time.deltaTime);// 注意:在 Update 方法中使用 Translate 会导致每帧移动,所以速度乘以 Time.deltaTime 以平衡不同帧率下的速度。}
}
在这个示例中,我们:
- 获取用户输入的方向(水平和垂直)。
- 创建一个表示移动方向的向量。
- 使用
Translate方法将游戏对象沿着其自身的轴进行平移。乘以speed和Time.deltaTime以平衡不同帧率下的速度。
需要注意的是,Translate 方法会修改游戏对象的位置,但它不会受到物理引擎的影响,因此可能不适合用于需要物理交互的情况。此外,Translate 方法是在游戏对象的 Transform 组件上调用的,所以您需要确保对象具有 Transform 组件。
也可以转换成世界坐标
对于世界坐标系的平移,您可以使用Transform.position属性来进行操作,例如:
using UnityEngine;public class TranslateWorldExample : MonoBehaviour
{public float speed = 5f; // 移动速度private void Update(){// 获取用户输入的方向float horizontalInput = Input.GetAxis("Horizontal");float verticalInput = Input.GetAxis("Vertical");// 计算移动方向Vector3 moveDirection = new Vector3(horizontalInput, 0f, verticalInput);// 使用世界坐标系进行平移transform.position += moveDirection * speed * Time.deltaTime;}
}
相关文章:
Unity 之 Transform.Translate 实现局部坐标系中进行平移操作的方法
文章目录 Translate 默认使用局部坐标也可以转换成世界坐标 Translate 默认使用局部坐标 在Unity中,Transform.Translate是用于在游戏对象的局部坐标系中进行平移操作的方法。这意味着它将游戏对象沿着其自身的轴进行移动,而不是世界坐标轴。这在实现物…...

PostgreSQL Error: sorry, too many clients already
Error PG的默认最大连接数是100. 如果超过100就会报错sorry, too many clients already Find show max_connections; SELECT COUNT(*) from pg_stat_activity; SELECT * FROM pg_stat_activity;Solution 提高最大连接数 ALTER SYSTEM SET max_connections 然后重启pg查看…...
)
Vue2(路由)
目录 一,路由原理(hash)二,路由安装和使用(vue2)三,路由跳转四,路由的传参和取值五,嵌套路由六,路由守卫最后 一,路由原理(hash&#…...
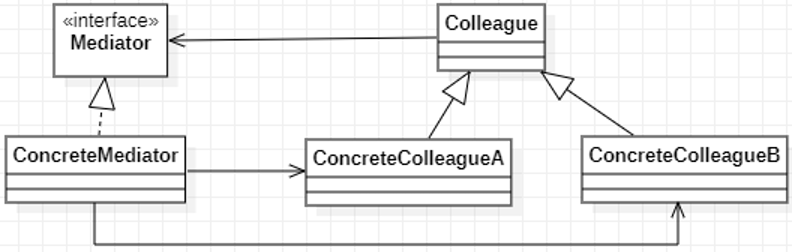
中介者模式-协调多个对象之间的交互
在深圳租房市场,有着许多的“二房东”,房主委托他们将房子租出去,而租客想要租房的话,也是和“二房东”沟通,租房期间有任何问题,找二房东解决。对于房主来说,委托给“二房东”可太省事了&#…...
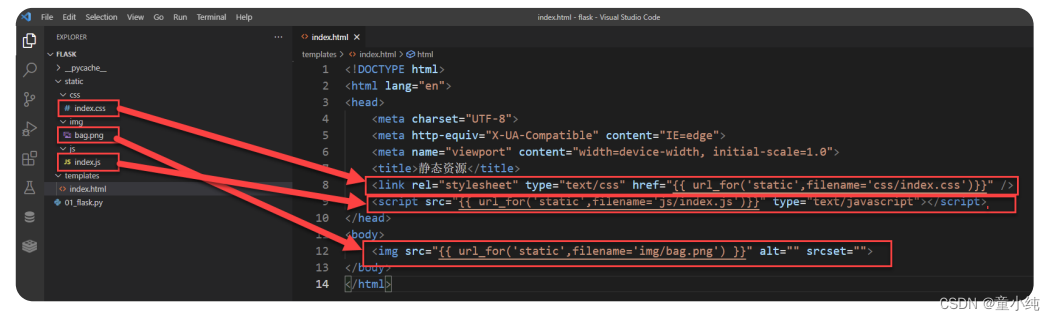
Python框架【自定义过滤器、自定义数据替换过滤器 、自定义时间过滤器、选择结构、选择练习、循环结构、循环练习、导入宏方式 】(三)
👏作者简介:大家好,我是爱敲代码的小王,CSDN博客博主,Python小白 📕系列专栏:python入门到实战、Python爬虫开发、Python办公自动化、Python数据分析、Python前后端开发 📧如果文章知识点有错误…...

红黑树遍历与Redis存储
引言 在计算机科学领域,红黑树(Red-Black Tree)是一种自平衡的二叉查找树,它能在O(log n)的时间复杂度内完成插入、删除和查找操作。由于其高效性和可预测性的性能,红黑树在许多领域都得到广泛应用。本文将重点介绍红…...

前端处理图片文件的方法
在项目开发过程中,有一个需求,需要前端对上传的图片进行处理,以字符串的形式传给后端,实现效果如下: 1.上传图片的组件 在该项目中,使用了element plus组件库 <el-uploadv-model:file-list"fileL…...

「Java」《深入解析Java多线程编程利器:CompletableFuture》
《深入解析Java多线程编程利器:CompletableFuture》 一、 引言1. 对多线程编程的需求和挑战的介绍2. 介绍CompletableFuture的作用和优势 二. CompletableFuture简介1. CompletableFuture是Java中提供的一个强大的多线程编程工具2. 与传统的Thread和Runnable相比的优…...
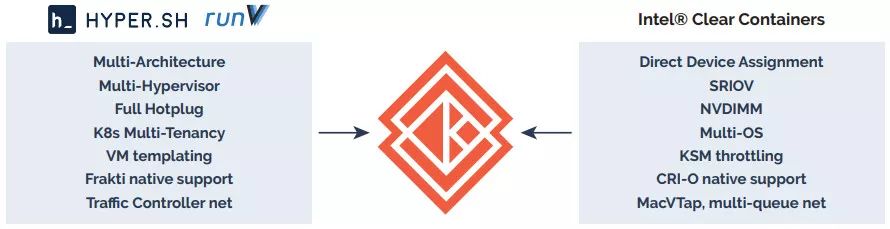
Docker容器与虚拟化技术:容器运行时说明与比较
目录 一、理论 1.容器运行时 2.容器运行时接口 3.容器运行时层级 4.容器运行时比较 5.强隔离容器 二、问题 1.K8S为何难以实现真正的多租户 三、总结 一、理论 1.容器运行时 (1)概念 Container Runtime 是运行于 k8s 集群每个节点中ÿ…...
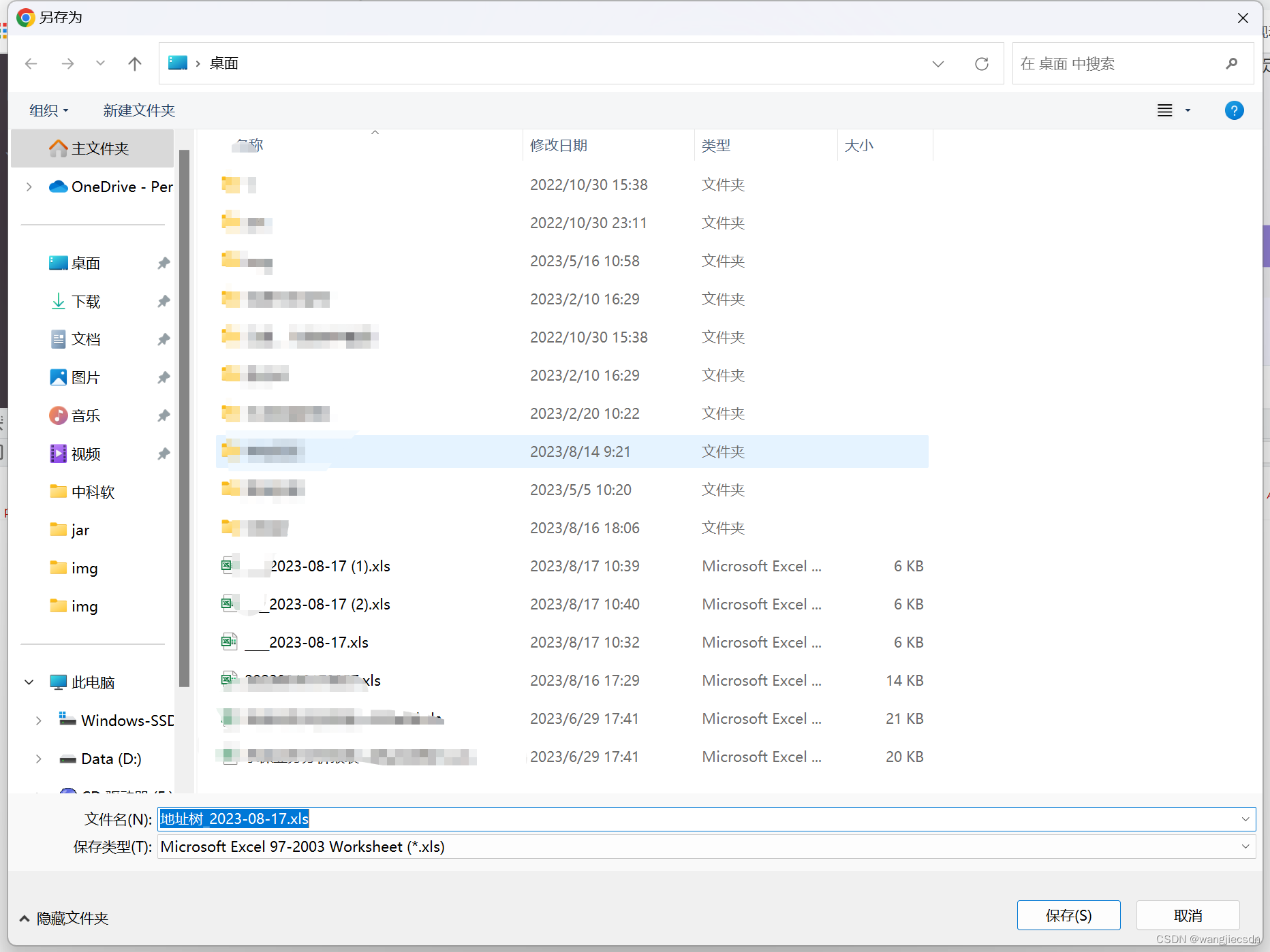
vue导出文件流获取附件名称并下载(在response.headers里解析filename导出)
导出文件流下载,拦截器统一处理配置 需求以往实现的方法(各自的业务层写方法)现在实现的方法(axios里拦截器统一配置处理)把文章链接复制粘贴给后端,让大佬自己赏阅。 需求 之前实现的导出都是各自的业务层…...

山东省图书馆典藏《乡村振兴战略下传统村落文化旅游设计》鲁图中大许少辉博士八一新书
山东省图书馆《乡村振兴战略下传统村落文化旅游设计》鲁图中大许少辉博士八一新书...

2023-08-19力扣每日一题-水题/位运算解法
链接: 2235. 两整数相加 题意: ab 解: ab 补一个位运算写法,进位是(a&b)<<1,不进位的计算结果为a^b 实际代码: #include<iostream> using namespace std; int sum(int num1, int n…...

Hadoop学习:深入解析MapReduce的大数据魔力之数据压缩(四)
Hadoop学习:深入解析MapReduce的大数据魔力之数据压缩(四) 4.1 概述1)压缩的好处和坏处2)压缩原则 4.2 MR 支持的压缩编码4.3 压缩方式选择4.3.1 Gzip 压缩4.3.2 Bzip2 压缩4.3.3 Lzo 压缩4.3.4 Snappy 压缩4.3.5 压缩…...
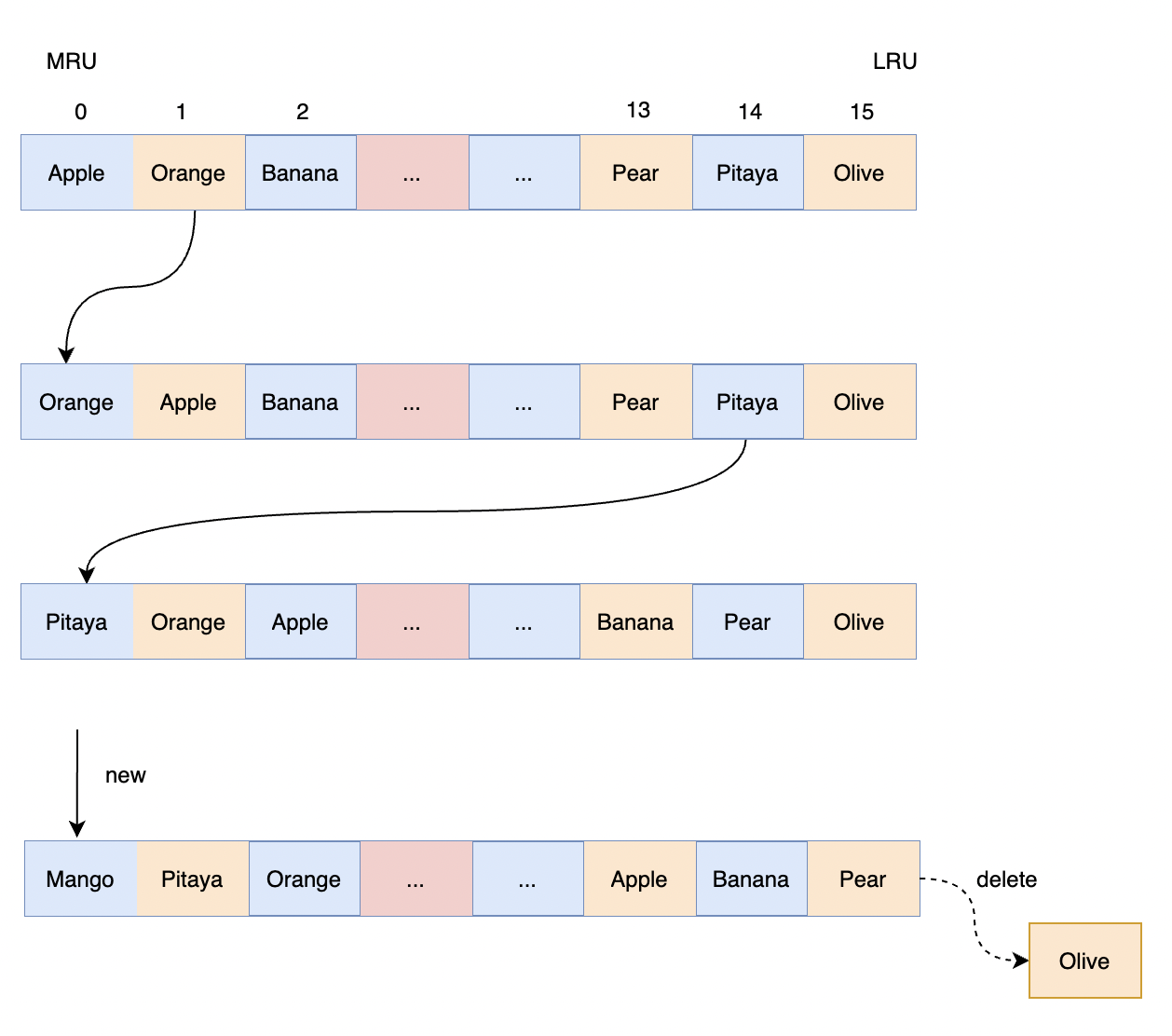
LRU淘汰策略执行过程
1 介绍 Redis无论是惰性删除还是定期删除,都可能存在删除不尽的情况,无法删除完全,比如每次删除完过期的 key 还是超过 25%,且这些 key 再也不会被客户端访问。 这样的话,定期删除和堕性删除可能都彻底的清理掉。如果…...

Kotlin 高阶函数详解
高阶函数 在 Kotlin 中,函数是一等公民,高阶函数是 Kotlin 的一大难点,如果高阶函数不懂的话,那么要学习 Kotlin 中的协程、阅读 Kotlin 的源码是非常难的,因为源码中有太多高阶函数了。 高阶函数的定义 高阶函数的…...

DL——week2
要学明白的知识点: np.dot()的作用 两个数组的点积,即对应元素相乘 numpy.dot(a,b,outNone) a: ndarray 数组 b: ndarray 数组 out: ndarray, 可选,用来保存dot()的计算结果 numpy Ndarray对象 N维数组对象ndarray&am…...

如何撰写骨灰级博士论文?这是史上最全博士论文指导!
博士论文的写作是博士研究生主要要完成的工作。由于存在着较高的难度,较长的写作周期,以及在创新,写作规范,实际及理论意义等方面有着比较高的要求,博士论文的完成一般说来是有相当难度的。一篇好的博士论文不仅是一本…...

08.SpringBoot请求相应
文章目录 1 请求1.1 Postman1.2 简单参数1.2.1 原始方式1.2.2 SpringBoot方式1.2.3 参数名不一致 1.3 实体参数1.3.1 简单实体对象1.3.2 复杂实体对象 1.4 数组集合参数1.4.1 数组1.4.2 集合 1.5 日期参数1.6 JSON参数1.7 路径参数 2 响应2.1 ResponseBody注解2.2 统一响应结果…...

C#详解-Contains、StartsWith、EndsWith、Indexof、lastdexof
目录 简介: 过程: 举例1.1 举例1.2 总结: 简介: 在C#中Contains、StarsWith和EndWith、IndexOf都是字符串函数。 1.Contains函数用于判断一个字符串是否包含指定的子字符串,返回一个布尔值(True或False)。 2.StartsWith函数用于判断一…...

FATE框架中pipline基础教程
目录 1. 用pipline上传数据2. 用 Pipeline 进行 Hetero SecureBoost 的训练和预测3. 用 Pipeline 构建神经网络模型3.1 Homo-NN Quick Start: A Binary Classification Task3.2 Hetero-NN Quick Start: A Binary Classification Task 4. 自定义数据集示例:实现一个简…...

碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理
碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧蓝…...

2026长沙智能家居品牌实测,这些本地老牌值得选
2026年,长沙的智能家居市场已经从“概念热”转向“落地战”。我走访了长沙多个本地服务商,实测了不同品牌在别墅、酒店、大平层等场景的真实表现。今天,结合数据与案例,分享几个值得关注的本地品牌,尤其是深耕8年以上的…...

Go开发者必备:circuitbreaker API全解析与最佳实践指南 [特殊字符]
Go开发者必备:circuitbreaker API全解析与最佳实践指南 🚀 【免费下载链接】circuitbreaker Circuit Breakers in Go 项目地址: https://gitcode.com/gh_mirrors/circ/circuitbreaker 作为一名Go开发者,你是否经常遇到远程服务调用失败…...

独立开发者利用taotoken模型广场为不同任务选择性价比最优模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者利用taotoken模型广场为不同任务选择性价比最优模型 对于独立开发者而言,在有限的预算内高效完成多样化的开…...

音乐解锁工具:让加密音乐文件在任何设备自由播放
音乐解锁工具:让加密音乐文件在任何设备自由播放 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https://gi…...

基于窗口比较器与晶体管逻辑的可编程非线性电压指示器设计
1. 项目概述:打造一个可编程的“移动光点”电压指示器在电子制作和仪器仪表领域,我们经常需要一个直观的电压指示器。经典的LM3914点/条图显示驱动芯片大家都很熟悉,它能把一个模拟电压信号转换成10个LED的点亮状态,形成移动的光点…...

无声输入革命:如何用Chaplin在5分钟内构建本地唇语识别系统
无声输入革命:如何用Chaplin在5分钟内构建本地唇语识别系统 【免费下载链接】chaplin A real-time silent speech recognition tool. 项目地址: https://gitcode.com/gh_mirrors/chapl/chaplin 在嘈杂的办公室、安静的图书馆,或是需要绝对隐私的医…...

3步精通WaveTools:鸣潮全场景性能优化终极指南
3步精通WaveTools:鸣潮全场景性能优化终极指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 开源优化工具WaveTools作为《鸣潮》玩家必备的性能调校助手,通过深度配置优化实现画质…...

Neat Bookmarks:重构Chrome书签管理的树状结构解决方案
Neat Bookmarks:重构Chrome书签管理的树状结构解决方案 【免费下载链接】neat-bookmarks A neat bookmarks tree popup extension for Chrome [DISCONTINUED] 项目地址: https://gitcode.com/gh_mirrors/ne/neat-bookmarks 在信息过载的数字化工作环境中&…...

终极指南:如何简单快速地解锁艾尔登法环帧率限制并优化游戏体验
终极指南:如何简单快速地解锁艾尔登法环帧率限制并优化游戏体验 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirro…...