Ompl初探
在/ompl-1.x.0/build/Release/bin下有很多生成的demo可执行文件
在终端执行 ./demo_Point2DPlanning
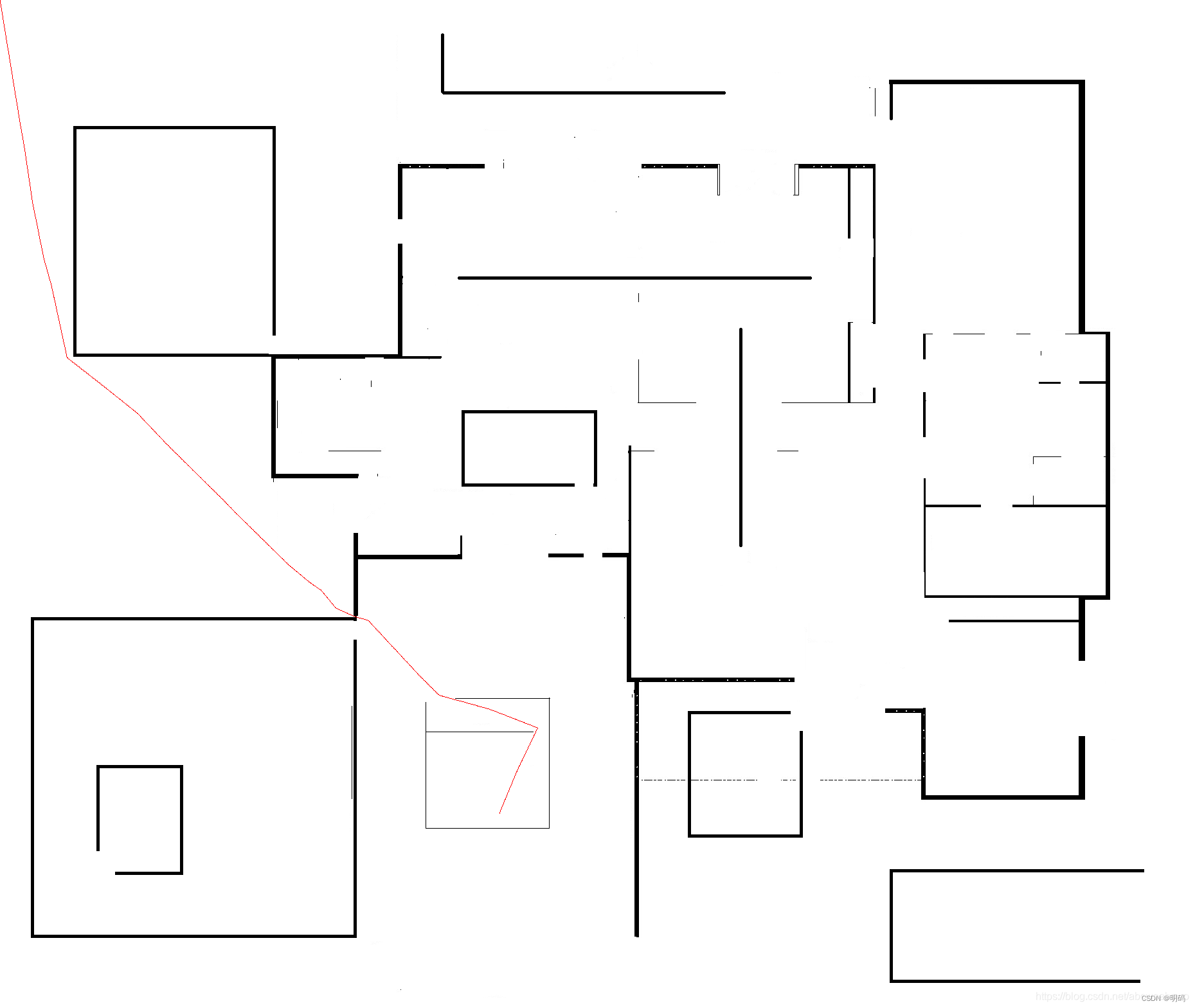
测试程序
#include <ompl/base/SpaceInformation.h>
#include <ompl/base/spaces/SE3StateSpace.h>
#include <ompl/base/StateSpace.h>
#include <ompl/base/Path.h>
#include <ompl/base/spaces/RealVectorBounds.h>
#include <ompl/base/spaces/RealVectorStateSpace.h>
#include <ompl/base/StateValidityChecker.h>
#include <ompl/base/OptimizationObjective.h>
#include <ompl/base/objectives/PathLengthOptimizationObjective.h>
// #include <ompl/geometric/planners/rrt/RRT.h>
#include <ompl/geometric/planners/rrt/RRTstar.h>
#include <ompl/geometric/SimpleSetup.h>
#include <ompl/config.h>#include <iostream>
#include <fstream>
#include <ostream>
#include "boost/bind.hpp"namespace ob = ompl::base;
namespace og = ompl::geometric;class ValidityChecker: public ob::StateValidityChecker{public:ValidityChecker(const ob::SpaceInformationPtr & si):ob::StateValidityChecker(si){}bool isValid(const ob::State* state) const{return this->clearance(state)>0.0;}double clearance(const ob::State* state) const{const ob::RealVectorStateSpace::StateType* state2D = state->as<ob::RealVectorStateSpace::StateType>();double x = state2D->values[0];double y = state2D->values[1];return sqrt((x - 0.5)*(x - 0.5) + (y-0.5)*(y-0.5)) - 0.25;}
};ob::OptimizationObjectivePtr getPathLengthObjective(const ob::SpaceInformationPtr& si){return ob::OptimizationObjectivePtr(new ob::PathLengthOptimizationObjective(si));
}void OptimalPlanningRRTStar(){ob::StateSpacePtr space(new ob::RealVectorStateSpace(2));space->as<ob::RealVectorStateSpace>()->setBounds(0.0,1.0);ob::SpaceInformationPtr si(new ob::SpaceInformation(space));si->setStateValidityChecker(ob::StateValidityCheckerPtr(new ValidityChecker(si)));si->setup();ob::ScopedState<> start(space);start->as<ob::RealVectorStateSpace::StateType>()->values[0] = 0.0;start->as<ob::RealVectorStateSpace::StateType>()->values[1] = 0.0;ob::ScopedState<> goal(space);goal->as<ob::RealVectorStateSpace::StateType>()->values[0] = 1.0;goal->as<ob::RealVectorStateSpace::StateType>()->values[1] = 1.0;ob::ProblemDefinitionPtr pdef(new ob::ProblemDefinition(si));pdef->setStartAndGoalStates(start,goal);pdef->setOptimizationObjective(getPathLengthObjective(si));ob::PlannerPtr optimizingPlanner(new og::RRTstar(si));optimizingPlanner->setProblemDefinition(pdef);optimizingPlanner->setup();ob::PlannerStatus solved = optimizingPlanner->solve(1.0);if(solved){std::cout<<"---------solved!--------"<<std::endl;og::PathGeometric* path = pdef->getSolutionPath()->as<og::PathGeometric>();std::cout<<"path point number="<<path->getStateCount()<<std::endl;std::ofstream ofs0("../path_rrt_star.dat");for(size_t path_idx = 0; path_idx < path->getStateCount(); path_idx++){const ob::RealVectorStateSpace::StateType *state = path->getState(path_idx)->as<ob::RealVectorStateSpace::StateType>();std::cout<<"i="<<path_idx<<",(x,y)="<<state->values[0]<<","<<state->values[1]<<std::endl;ofs0<<state->values[0]<<" "<<state->values[1]<<std::endl;}pdef->getSolutionPath()->print(std::cout);}}int main(){OptimalPlanningRRTStar();return 0;
}
find_package(ompl REQUIRED)
include_directories(${OMPL_INCLUDE_DIRS})
link_directories(${OMPL_LIBRARY_DIRS})
add_definitions(${OMPL_DEFINITIONS})
find_package(Boost COMPONENTS system REQUIRED)
add_executable(test_rrtstar src/ompl_test/rrtstar.cc)
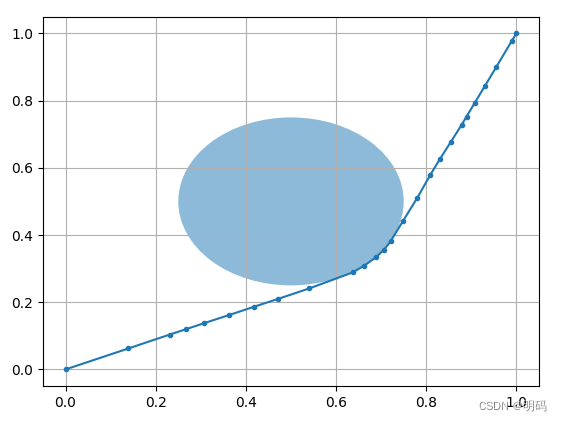
target_link_libraries(test_rrtstar ${Boost_LIBRARIES} ${OMPL_LIBRARIES})可视化脚本
from mpl_toolkits.mplot3d import Axes3D
import numpy
import matplotlib.pyplot as plt
from matplotlib.patches import Circlecir1 = Circle(xy = (0.5,0.5),radius=0.25,alpha=0.5)
data = numpy.loadtxt('path_rrt_star.dat')
#data1= numpy.loadtxt('obstacle.dat')
fig = plt.figure()
ax=fig.add_subplot(111)
ax.add_patch(cir1)
#ax = fig.gca(projection='3d')
plt.plot(data[:,0],data[:,1],'.-')
plt.hold('on')
plt.grid('on')
#plt.fill(data1[:,0],data1[:,1],'.-')
#plt.hold('on')
#plt.grid('on')
plt.show()
python3 mpplot.py
需要安装mpl_toolkits
python中绘制3D图形,依旧使用常用的绘图模块matplotlib,但需要安装mpl_toolkits工具包,安装方法如下:windows命令行进入到python安装目录下的Scripts文件夹下,执行: pip install --upgrade matplotlib即可、
不过这里暂时没用
import numpy
import matplotlib.pyplot as plt
from matplotlib.patches import Circledata=numpy.loadtxt("path_rrt_star.dat")
T=numpy.arctan2(data[:,0],data[:,1])plt.scatter(data[:,0],data[:,1],s=80,c=T,alpha=0.5)
plt.show()
python3 mpplot2.py
ref
http://ompl.kavrakilab.org/optimalPlanningTutorial.html
https://www.cnblogs.com/Pythonmiss/p/10690056.html
Walk towards the throne
相关文章:
Ompl初探
在/ompl-1.x.0/build/Release/bin下有很多生成的demo可执行文件 在终端执行 ./demo_Point2DPlanning 测试程序 #include <ompl/base/SpaceInformation.h> #include <ompl/base/spaces/SE3StateSpace.h> #include <ompl/base/StateSpace.h> #include <o…...

android sdk打包aar方案步骤
1.使用fat-aar库https://github.com/kezong/fat-aar-android/blob/master/README_CN.md 第一步:添加以下代码到你工程根目录下的build.gradle文件中: For Maven Central (The lastest release is available on Maven Central): buildscript {repositories {maven…...

Redis之bitmap类型解读
目录 基本介绍 基本命令 Setbit Getbit BITCOUNT 应用场景 统计当日活跃用户 用户签到 bitmap - Redis布隆过滤器 (应对缓存穿透问题) 基本介绍 Redis 的位图(bitmap)是由多个二进制位组成的数组,只有两…...

stm32之10.系统定时器
delay_s()延时秒 delay_ms()毫秒*1000 delay_us()微秒*1000000 微秒定时器代码 void delay_us(uint32_t n) { SysTick->CTRL 0; // Disable SysTick,关闭系统定时器 SysTick->LOAD SystemCoreClock/1000000*n-1; // 就是nus SysTick->LOAD Sys…...

PyTorch安装教程:从头开始配置PyTorch环境
PyTorch是一个开源的机器学习框架,广泛用于深度学习任务。要开始使用PyTorch,您需要在计算机上正确配置PyTorch环境。本文将为您提供一步步的指南,帮助您成功安装和配置PyTorch。 第一部分:安装Python和相关工具 第一步…...
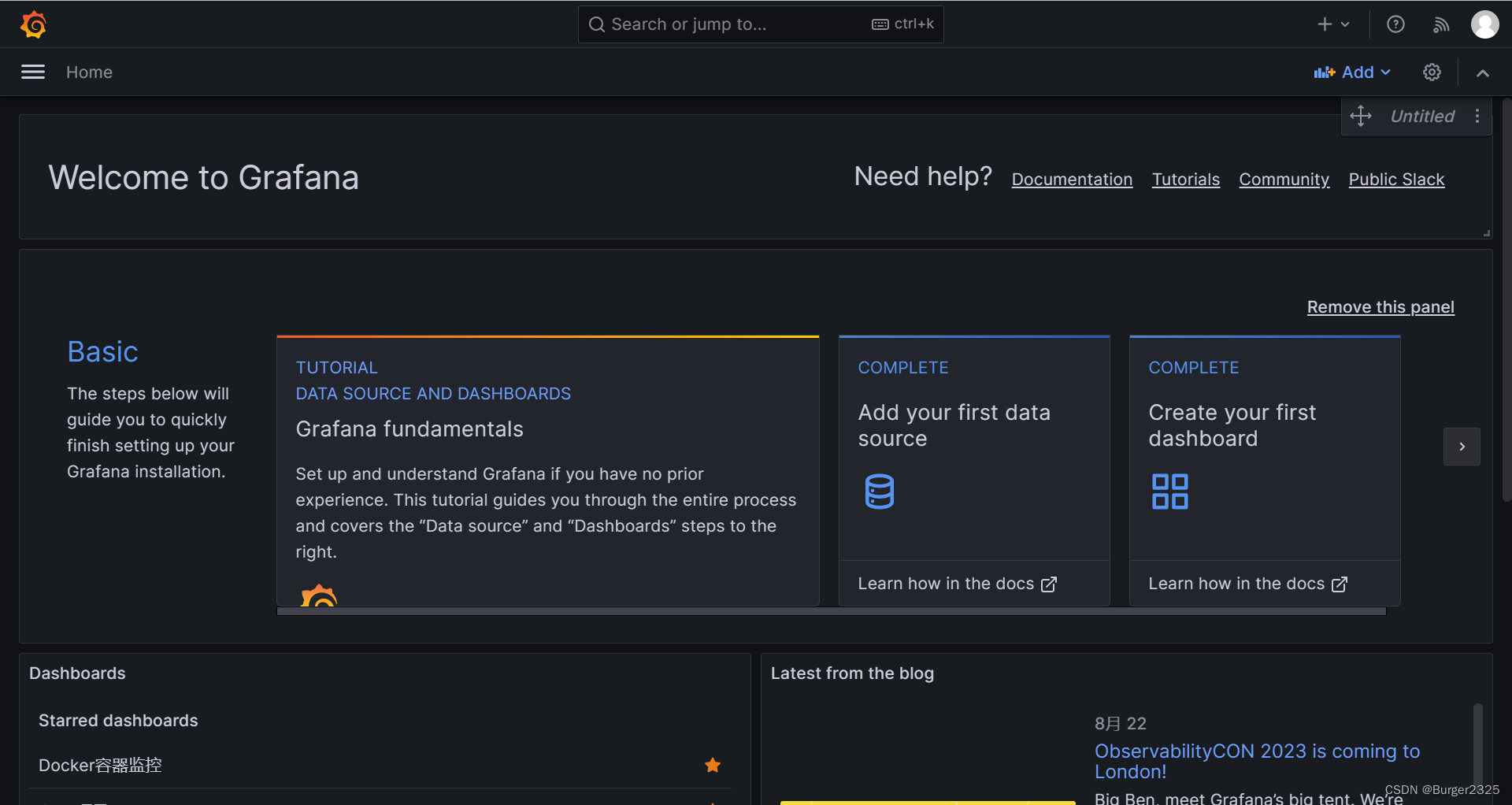
Docker拉取并配置Grafana
Linux下安装Docker请参考:Linux安装Docker 安装准备 新建挂载目录 /opt/grafana/data目录,准备用来挂载放置grafana的数据 /opt/grafana/plugins目录,准备用来放置grafana的插件 /opt/grafana/config目录,准备用来挂载放置graf…...

Vue+Axios搭建二次元动态登录页面(mp4视频格式)
最近想做一个前端登录页面,背景好看的,格式中规中矩的,这么难?我自己创一个吧! 效果图如下: 源码可以参考我的github,复制源码即可用:gym02/loginPage_Vue: 使用VueAxios搭建的动态…...
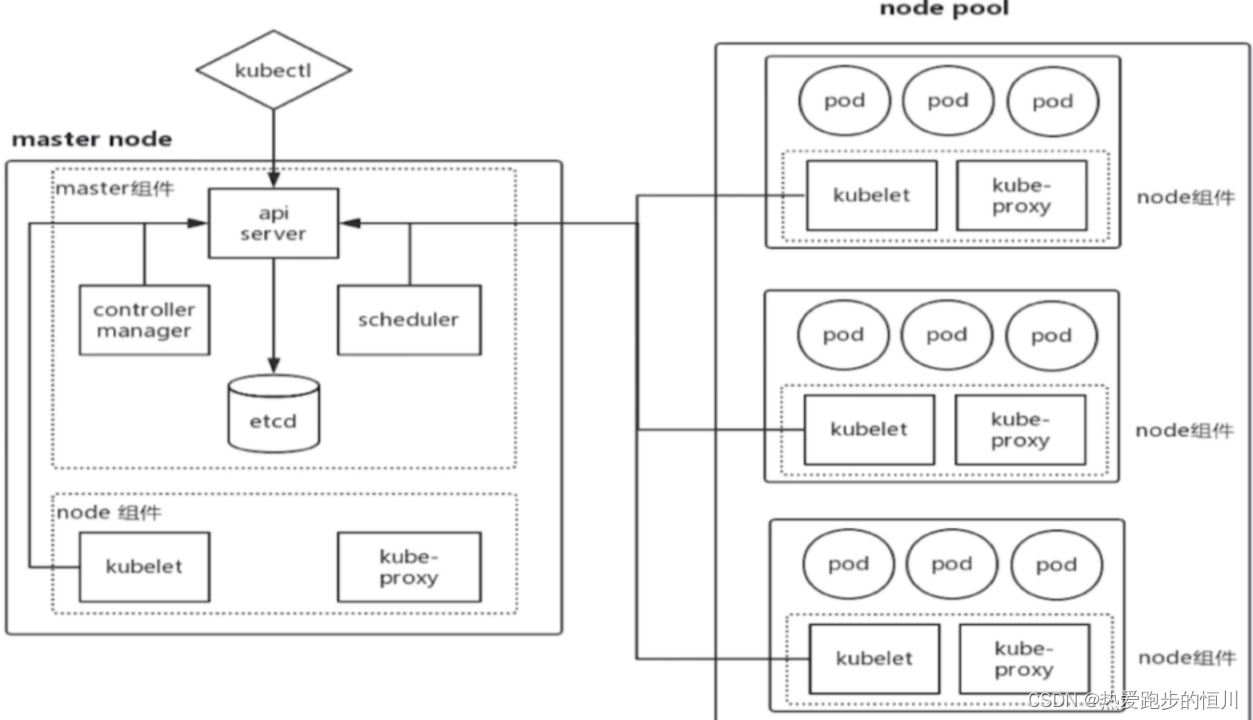
【Kubernetes】K8S到底是什么,最近怎么这么火
前言 kubernetes,简称K8s,是用8代替名字中间的8个字符“ubernete”而成的缩写。是一个开源的,用于管理云平台中多个主机上的容器化的应用,Kubernetes的目标是让部署容器化的应用简单并且高效(powerful),Kub…...

Java爬虫下载网页图片
在Java中,可以使用HttpURLConnection,Jsoup等库来实现网页爬取和图片下载。下面是一个基本的例子: 首先,需要添加Jsoup库到你的项目中。如果你使用Maven,可以在你的pom.xml文件中添加以下依赖: xml <…...
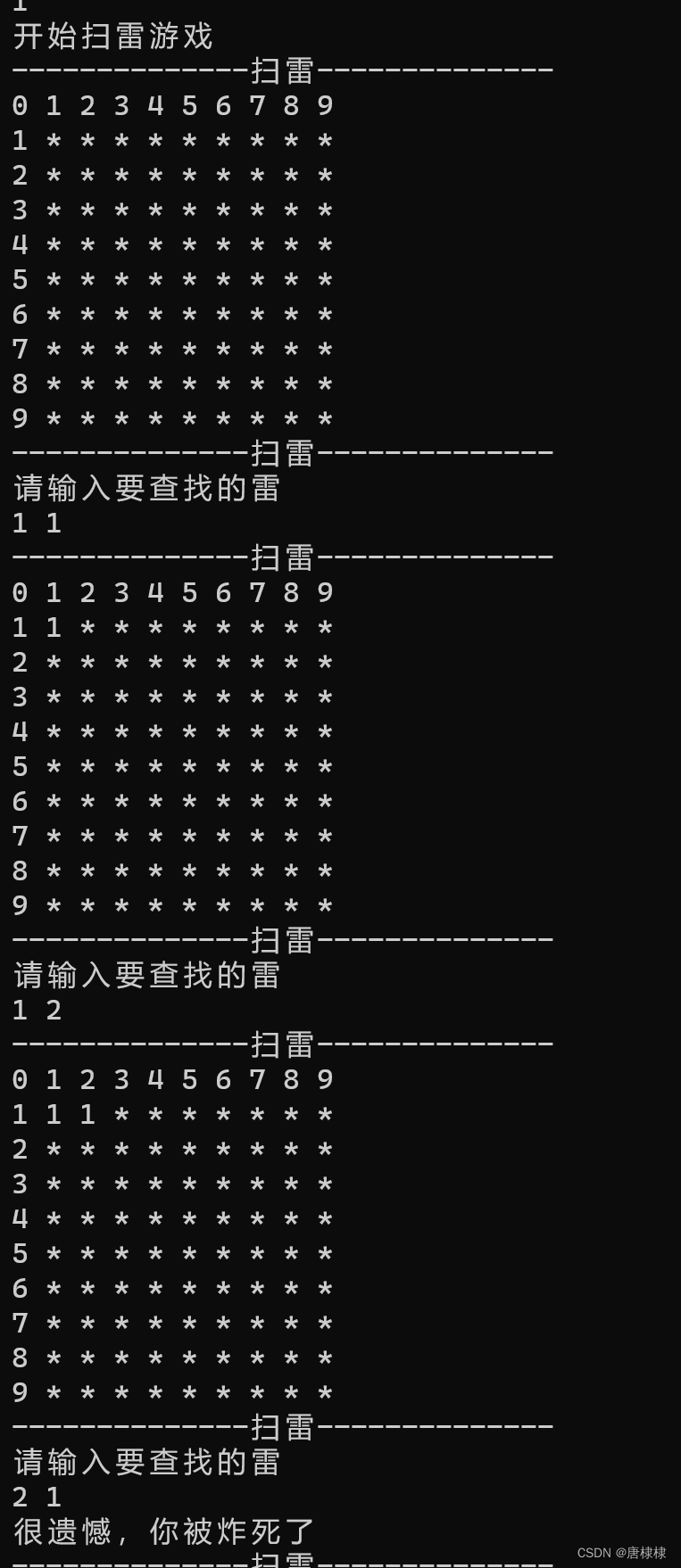
C语言之扫雷游戏实现篇
目录 主函数test.c 菜单函数 选择循环 扫雷游戏实现分析 整体思路 问题1 问题2 问题3 问题4 游戏函数(函数调用) 创建游戏盘数组mine 创建游戏盘数组show 初始化游戏盘数组InitBoard 展示游戏盘DisplayBoard 游戏盘置雷SetMine 游戏…...

Python面向对象中super用法与MRO机制
Python面向对象中super用法与MRO机制 最近再看trackformer,里面用到了super的用法,记录一下super的用法 class A(object):def __init__(self):print(init A)def fun(self):print(A.fun)print(self)super(A, self).fun()class B(object):def __init__(s…...
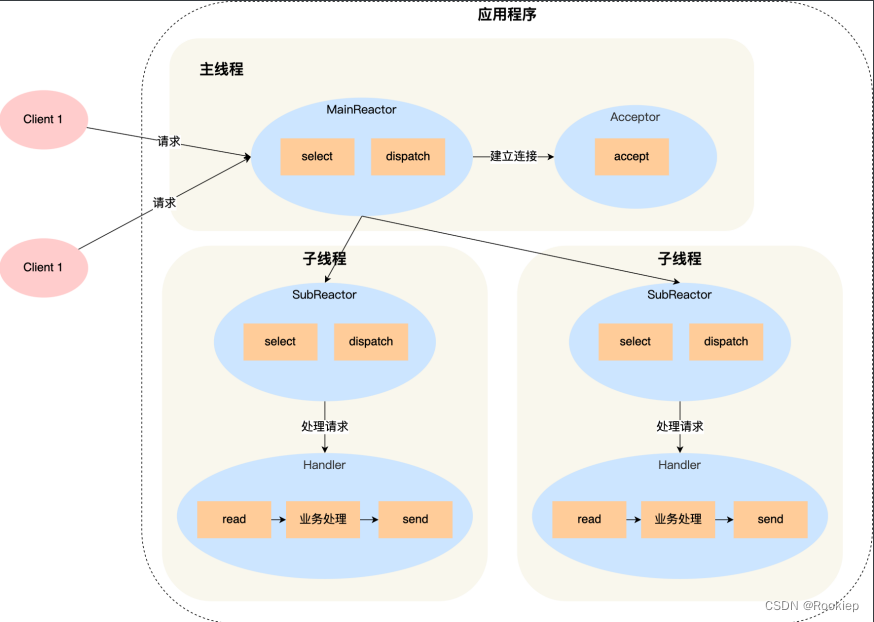
高性能网络模式-Reactor
事实上,Reactor 模式也叫Dispatcher模式,即I/O 多路复⽤监听事件,收到事件后,根据事件类型分配(Dispatch)给某个进程/线程。Reactor 模式也是一种非阻塞同步网络模式。 Reactor 模式主要由 Reactor部分和处…...

gRpc的四种通信方式详细介绍
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...
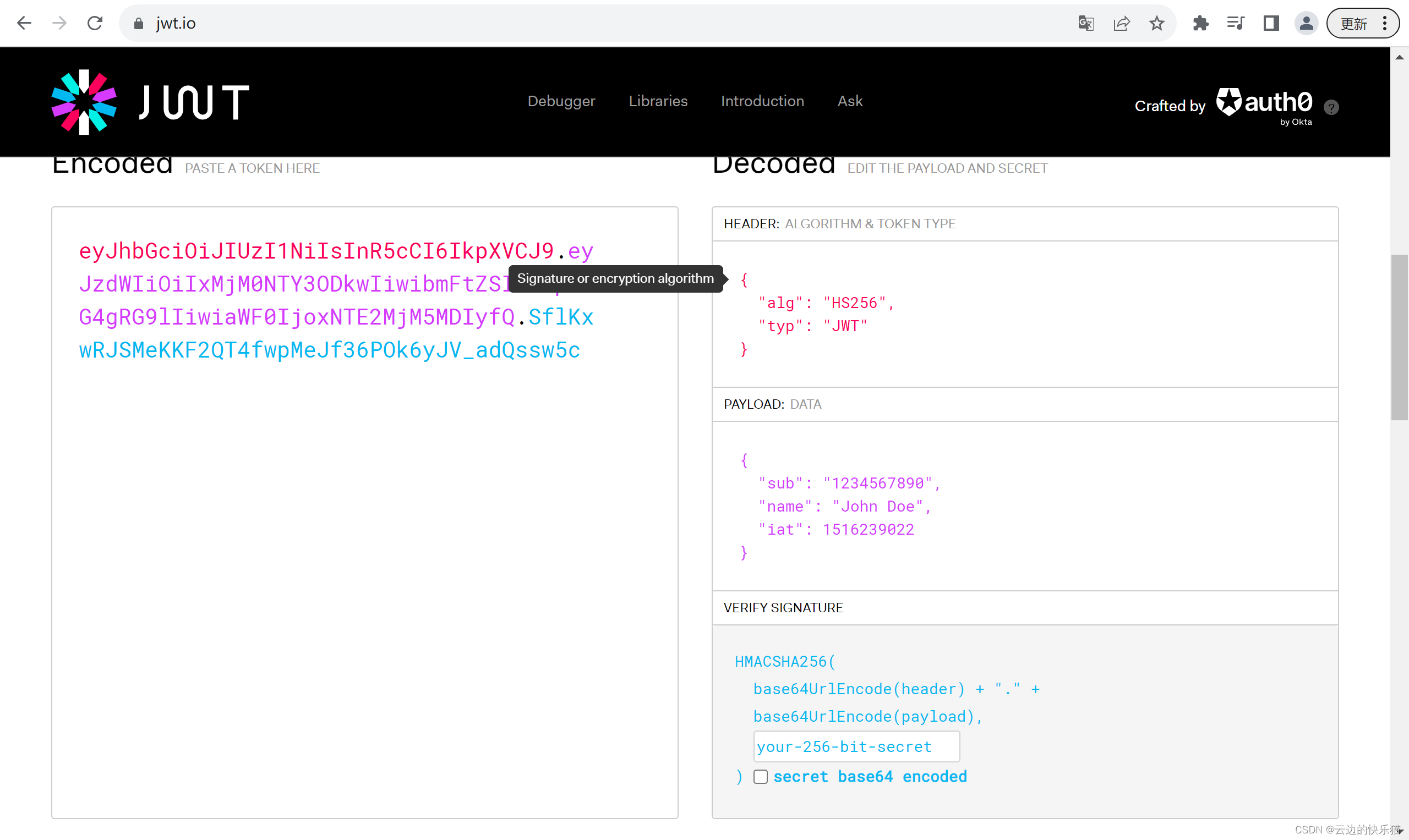
JWT令牌的介绍
目录 一、什么是JWT 二、JWT令牌和Cookie客户端、Session服务端对比 三、特点与注意事项 四、使用场景 优点: 五、结构组成 一、什么是JWT JWT(JSON Web Token)是一种用于在网络应用间传递信息的开放标准(RFC 7519&#x…...
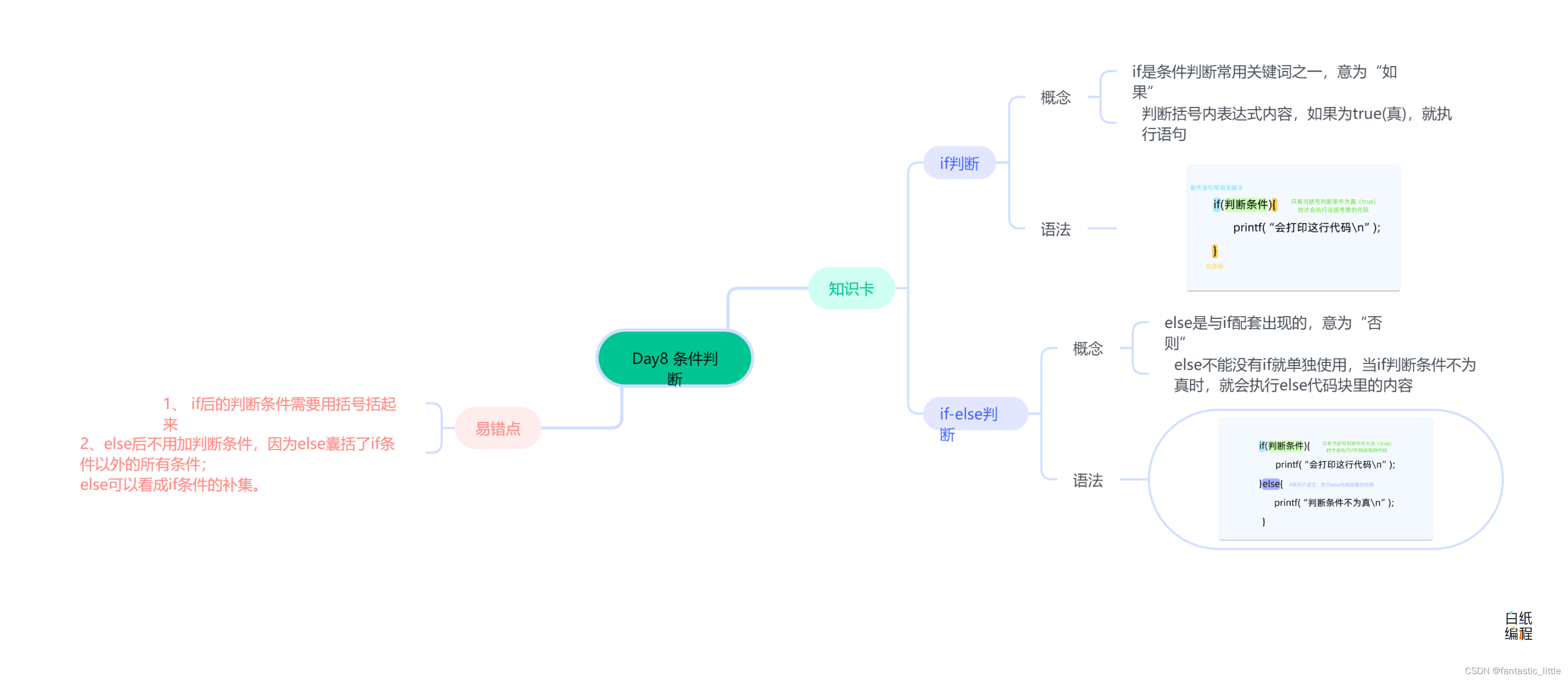
C语言入门 Day_9 条件判断
目录 前言: 1.if判断 2.else判断 3.易错点 4.思维导图 前言: 我们知道比较运算和逻辑运算都会得到一个布尔型的数据,要么为真(true),要么为假(false)。 今天我们来学习真和假在…...
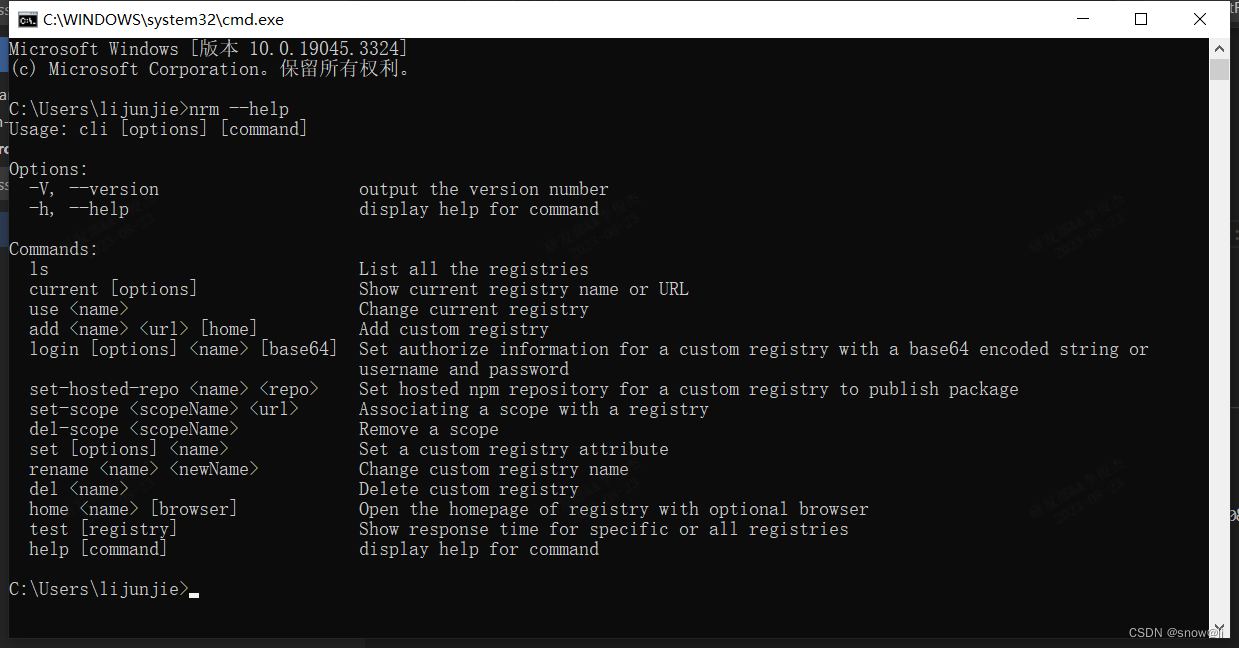
Nodejs-nrm:快速切换npm源 / npm官方源和其他自定义源之间切换
一、理解 Nodejs nrm Nodejs nrm 是一个管理 npm 源的工具。由于 npm 在国内的速度较慢,很多开发者会使用淘宝的 npm 镜像源,但是也会遇到一些问题,例如某些包在淘宝镜像源中不存在,或者淘宝镜像源本身也会有问题。 Nodejs nrm …...

数据驱动洞察:各种词频分析技术挖掘热点数据
一、引言 随着信息时代的发展,人们的关注点日益复杂多样。社交媒体、新闻网站和论坛等平台上涌现了大量的信息,这使得热点分析成为了解社会热点话题和舆情动向的重要手段。词频统计是热点分析的基础,本文将分别介绍基于ElasticSearch、基于S…...

ES6-简介、语法
ES6 ES6简介 ECMAScript 6(简称ES6)是于2015年6月正式发布的JavaScript语言的标准,正式名为ECMAScript 2015(ES2015)。它的目标是使得JavaScript语言可以用来编写复杂的大型应用程序,成为企业级开发语…...

诚迈科技子公司智达诚远与Unity中国达成合作,打造智能座舱新时代
2023 年 8 月 23 日,全球领先的实时 3D 引擎 Unity 在华合资公司 Unity 中国举办发布会,正式对外发布 Unity 引擎中国版——团结引擎,并带来专为次世代汽车智能座舱打造的团结引擎车机版。发布会上,诚迈科技副总裁、诚迈科技子公司…...
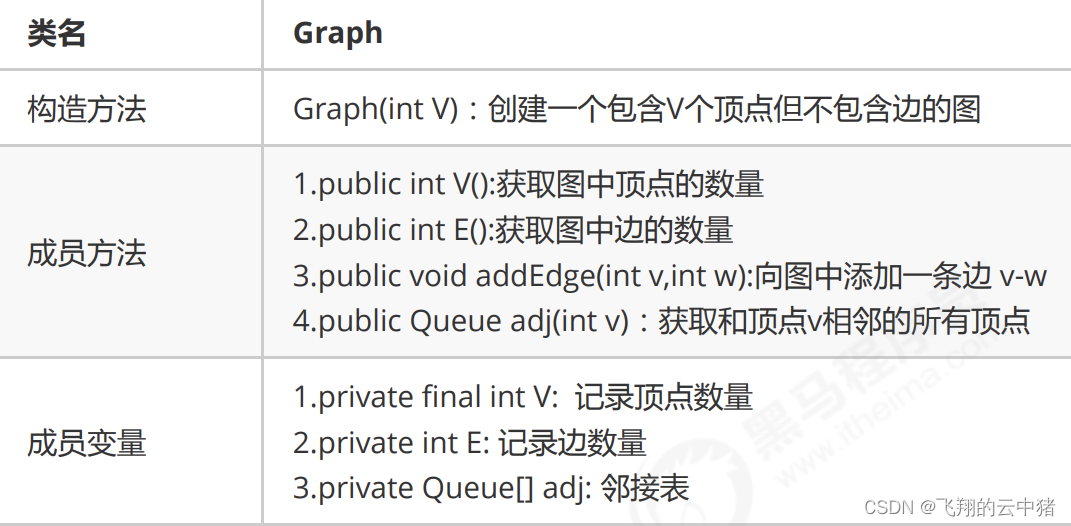
算法与数据结构(十)--图的入门
一.图的定义和分类 定义:图是由一组顶点和一组能够将两个顶点连接的边组成的。 特殊的图: 1.自环:即一条连接一个顶点和其自身的边; 2.平行边:连接同一对顶点的两条边; 图的分类: 按照连接两个顶点的边的…...

Next.js功能开关实践:用happykit/flags实现灰度发布与A/B测试
1. 项目概述:为什么我们需要一个功能开关系统?在软件开发,尤其是现代Web应用和微服务架构的迭代过程中,我们经常面临一个经典困境:新功能开发完成后,是直接全量发布给所有用户,还是先小范围灰度…...

CREO 6.0装配实战:别再乱拖零件了,手把手教你用‘移动’和‘角度偏移’精准定位
CREO 6.0装配实战:从零件乱飞到精准定位的进阶技巧 刚接触CREO装配模块的新手设计师,最常遇到的挫败感莫过于:明明在脑海中构思好了零件位置,实际操作时却总是出现零件"乱飞"、"定位不准"的情况。这种体验就像…...

告别手动配网!用IEEE 1905.1协议实现Wi-Fi AP自动配置的保姆级流程拆解
告别手动配网!用IEEE 1905.1协议实现Wi-Fi AP自动配置的保姆级流程拆解 想象一下,当你需要为三层别墅部署全屋Wi-Fi覆盖,或是为小型办公室搭建多AP无线网络时,传统方式需要逐个登录每个AP的后台,重复输入SSID、密码、…...

IP核验证责任共担模型:从授权方到被授权方的实践策略
1. IP核验证的责任边界:一场持续多年的行业对话在SoC设计领域,IP核的集成与验证从来都不是一个轻松的话题。随着芯片设计复杂度的指数级增长,一个现代SoC中可能集成了数十甚至上百个来自不同供应商的IP核,从处理器、内存控制器到各…...

Java集成OpenAI全攻略:从SDK选型到企业级应用实战
1. 项目概述与核心价值最近在折腾一个内部的知识库问答机器人,后端服务用Java写的,自然就想找个好用的OpenAI SDK来对接。市面上Java的客户端库不少,但要么封装得过于简单,很多高级功能没有,要么就是更新不及时&#x…...

热潮下的冷思考:从OpenClaw“龙虾”困境看AI Agent的理性选择与国产平替
2026年初,开源AI智能体项目OpenClaw(俗称“小龙虾”)以一种近乎野蛮的方式闯入大众视野。两天内GitHub星标突破17万,线下排队安装,甚至催生了“代装龙虾”的灰色产业。然而,这场技术狂欢的B面,却…...

FastGithub终极提速方案:3步让GitHub访问速度翻倍
FastGithub终极提速方案:3步让GitHub访问速度翻倍 【免费下载链接】FastGithub github定制版的dns服务,解析访问github最快的ip 项目地址: https://gitcode.com/gh_mirrors/fa/FastGithub 对于开发者而言,GitHub访问缓慢已经成为日常开…...

常闭式防火门,关严才是安全门|90% 的火灾隐患源于忽视它
常闭式防火门,关严才是真正的安全门!现实里 90% 的消防火灾隐患,都源于常闭式防火门长期敞开、随意封堵、私自固定不关。很多人觉得开门方便通行、搬货省事,却忽略了它的核心作用:防火隔烟、阻隔火势、延缓蔓延、守护疏…...

小熊猫Dev-C++:5个理由让你爱上这款轻量级C++开发工具
小熊猫Dev-C:5个理由让你爱上这款轻量级C开发工具 【免费下载链接】Dev-CPP A greatly improved Dev-Cpp 项目地址: https://gitcode.com/gh_mirrors/dev/Dev-CPP 在C编程的世界里,寻找一个既功能强大又简单易用的开发环境常常让初学者望而却步。…...

【AI智能体】OpenClaw 本地 数字员工 Windows 快速搭建方法
OpenClaw(小龙虾)是一款备受开发者关注的开源本地 AI 智能体,凭借本地运行、零代码操作、自动执行电脑任务等特点快速普及。它不只是对话 AI,更是能够直接操控系统的自动化工具,可根据自然语言指令完成任务拆解、工具调…...