【动手学深度学习】--21.锚框
锚框
学习视频:锚框【动手学深度学习v2】
官方笔记:锚框
1.锚框
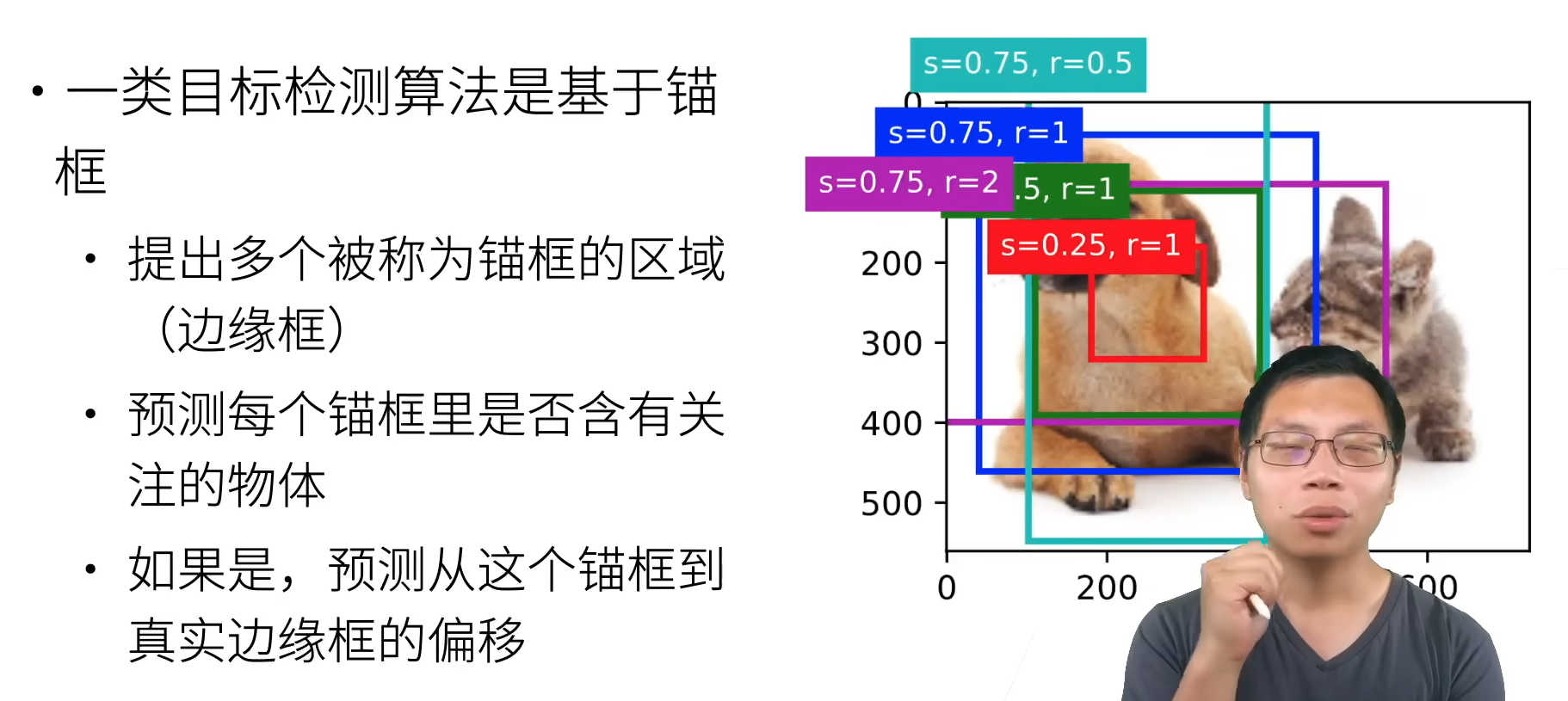
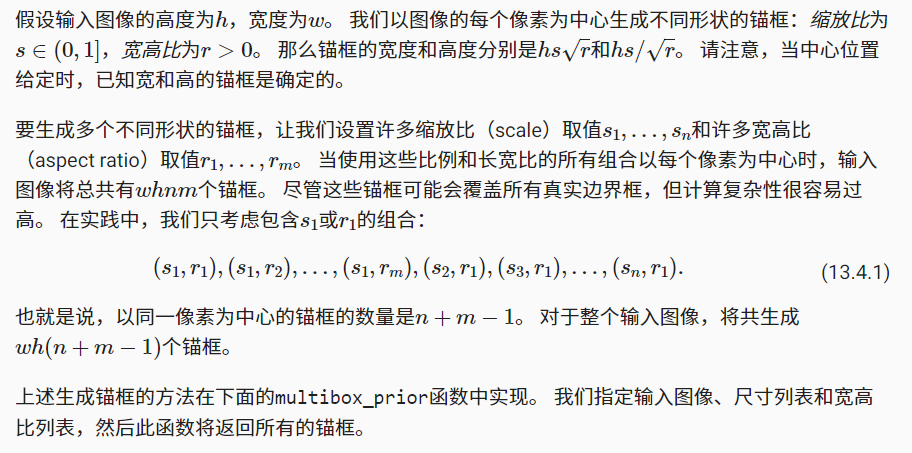
目标检测算法通常会在输入图像中采样大量的区域,然后判断这些区域中是否包含我们感兴趣的目标,并调整区域边界从而更准确地预测目标的真实边界框(ground-truth bounding box)。 不同的模型使用的区域采样方法可能不同。 这里我们介绍其中的一种方法:以每个像素为中心,生成多个缩放比和宽高比(aspect ratio)不同的边界框。 这些边界框被称为锚框(anchor box)
首先,让我们修改输出精度,以获得更简洁的输出
%matplotlib inline
import torch
from d2l import torch as d2ltorch.set_printoptions(2) # 精简输出精度
1.1生成多个锚框
#@save
def multibox_prior(data, sizes, ratios):"""生成以每个像素为中心具有不同形状的锚框"""in_height, in_width = data.shape[-2:]device, num_sizes, num_ratios = data.device, len(sizes), len(ratios)boxes_per_pixel = (num_sizes + num_ratios - 1)size_tensor = torch.tensor(sizes, device=device)ratio_tensor = torch.tensor(ratios, device=device)# 为了将锚点移动到像素的中心,需要设置偏移量。# 因为一个像素的高为1且宽为1,我们选择偏移我们的中心0.5offset_h, offset_w = 0.5, 0.5steps_h = 1.0 / in_height # 在y轴上缩放步长steps_w = 1.0 / in_width # 在x轴上缩放步长# 生成锚框的所有中心点center_h = (torch.arange(in_height, device=device) + offset_h) * steps_hcenter_w = (torch.arange(in_width, device=device) + offset_w) * steps_wshift_y, shift_x = torch.meshgrid(center_h, center_w, indexing='ij')shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1)# 生成“boxes_per_pixel”个高和宽,# 之后用于创建锚框的四角坐标(xmin,xmax,ymin,ymax)w = torch.cat((size_tensor * torch.sqrt(ratio_tensor[0]),sizes[0] * torch.sqrt(ratio_tensor[1:])))\* in_height / in_width # 处理矩形输入h = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),sizes[0] / torch.sqrt(ratio_tensor[1:])))# 除以2来获得半高和半宽anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(in_height * in_width, 1) / 2# 每个中心点都将有“boxes_per_pixel”个锚框,# 所以生成含所有锚框中心的网格,重复了“boxes_per_pixel”次out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],dim=1).repeat_interleave(boxes_per_pixel, dim=0)output = out_grid + anchor_manipulationsreturn output.unsqueeze(0)
可以看到返回的锚框变量Y的形状是(批量大小,锚框的数量,4)。
img = d2l.plt.imread('../img/catdog.jpg')
h, w = img.shape[:2]print(h, w)
X = torch.rand(size=(1, 3, h, w))
Y = multibox_prior(X, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5])
Y.shape'''
561 728torch.Size([1, 2042040, 4])
'''
将锚框变量Y的形状更改为(图像高度,图像宽度,以同一像素为中心的锚框的数量,4)后,我们可以获得以指定像素的位置为中心的所有锚框。 在接下来的内容中,我们访问以(250,250)为中心的第一个锚框。 它有四个元素:锚框左上角的(x,y)轴坐标和右下角的(x,y)轴坐标。 输出中两个轴的坐标各分别除以了图像的宽度和高度。
boxes = Y.reshape(h, w, 5, 4)
boxes[250, 250, 0, :]'''
tensor([0.06, 0.07, 0.63, 0.82])
'''
为了显示以图像中以某个像素为中心的所有锚框,定义下面的show_bboxes函数来在图像上绘制多个边界框。
#@save
def show_bboxes(axes, bboxes, labels=None, colors=None):"""显示所有边界框"""def _make_list(obj, default_values=None):if obj is None:obj = default_valueselif not isinstance(obj, (list, tuple)):obj = [obj]return objlabels = _make_list(labels)colors = _make_list(colors, ['b', 'g', 'r', 'm', 'c'])for i, bbox in enumerate(bboxes):color = colors[i % len(colors)]rect = d2l.bbox_to_rect(bbox.detach().numpy(), color)axes.add_patch(rect)if labels and len(labels) > i:text_color = 'k' if color == 'w' else 'w'axes.text(rect.xy[0], rect.xy[1], labels[i],va='center', ha='center', fontsize=9, color=text_color,bbox=dict(facecolor=color, lw=0))
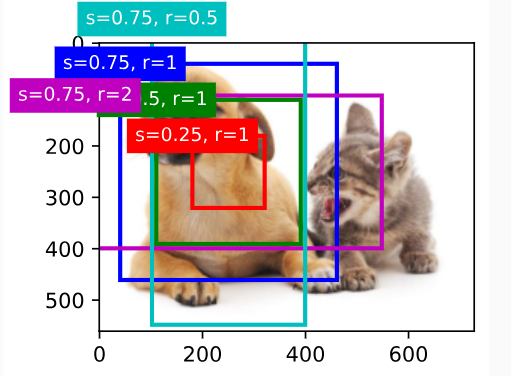
正如从上面代码中所看到的,变量boxes中x轴和y轴的坐标值已分别除以图像的宽度和高度。 绘制锚框时,我们需要恢复它们原始的坐标值。 因此,在下面定义了变量bbox_scale。 现在可以绘制出图像中所有以(250,250)为中心的锚框了。 如下所示,缩放比为0.75且宽高比为1的蓝色锚框很好地围绕着图像中的狗。
d2l.set_figsize()
bbox_scale = torch.tensor((w, h, w, h))
fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, boxes[250, 250, :, :] * bbox_scale,['s=0.75, r=1', 's=0.5, r=1', 's=0.25, r=1', 's=0.75, r=2','s=0.75, r=0.5'])
2.交并比
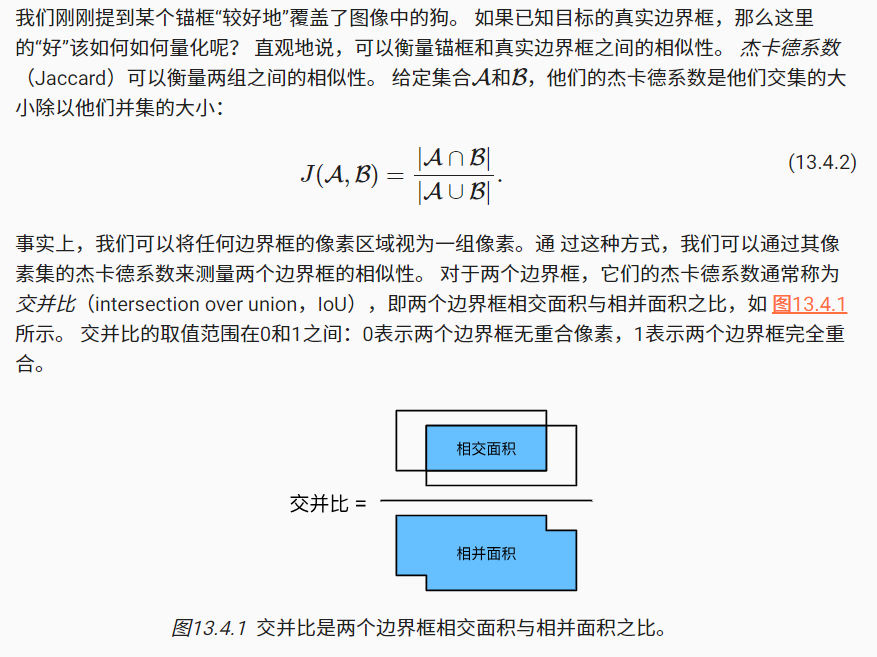
接下来部分将使用交并比来衡量锚框和真实边界框之间、以及不同锚框之间的相似度。 给定两个锚框或边界框的列表,以下box_iou函数将在这两个列表中计算它们成对的交并比。
#@save
def box_iou(boxes1, boxes2):"""计算两个锚框或边界框列表中成对的交并比"""box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) *(boxes[:, 3] - boxes[:, 1]))# boxes1,boxes2,areas1,areas2的形状:# boxes1:(boxes1的数量,4),# boxes2:(boxes2的数量,4),# areas1:(boxes1的数量,),# areas2:(boxes2的数量,)areas1 = box_area(boxes1)areas2 = box_area(boxes2)# inter_upperlefts,inter_lowerrights,inters的形状:# (boxes1的数量,boxes2的数量,2)inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)inter_areas = inters[:, :, 0] * inters[:, :, 1]union_areas = areas1[:, None] + areas2 - inter_areasreturn inter_areas / union_areas
3.在训练数据中标注锚框
在训练集中,我们将每个锚框视为一个训练样本。 为了训练目标检测模型,我们需要每个锚框的类别(class)和偏移量(offset)标签,其中前者是与锚框相关的对象的类别,后者是真实边界框相对于锚框的偏移量。 在预测时,我们为每个图像生成多个锚框,预测所有锚框的类别和偏移量,根据预测的偏移量调整它们的位置以获得预测的边界框,最后只输出符合特定条件的预测边界框。
目标检测训练集带有真实边界框的位置及其包围物体类别的标签。 要标记任何生成的锚框,我们可以参考分配到的最接近此锚框的真实边界框的位置和类别标签
3.1 将真实边界框分配给锚框
具体算法为:
#@save
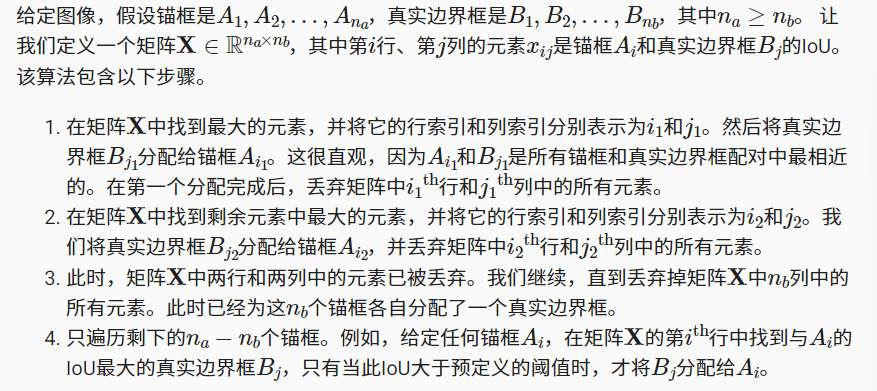
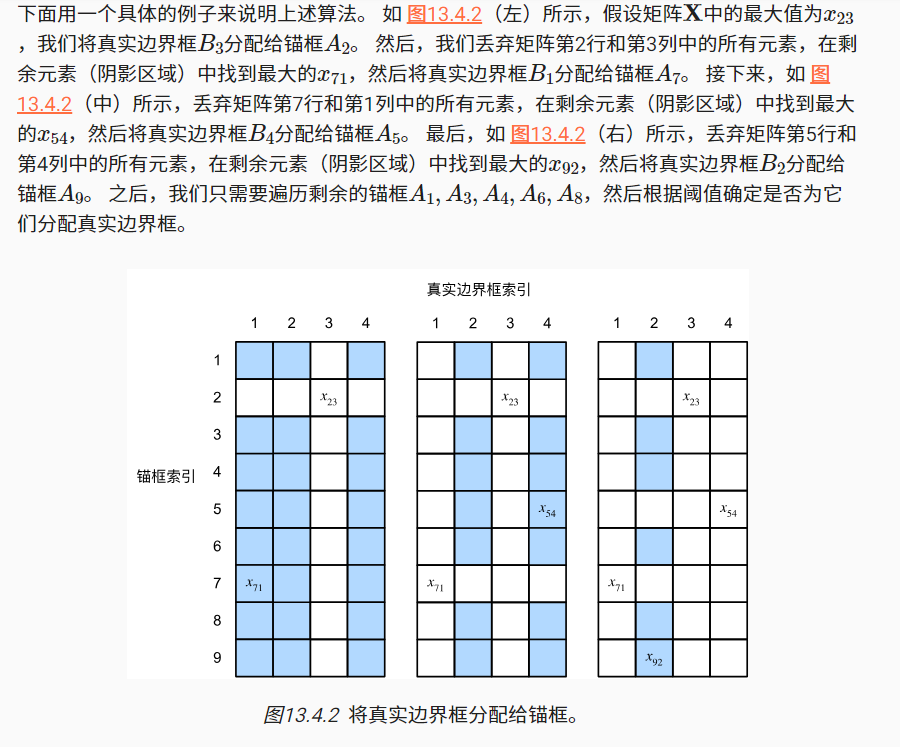
def assign_anchor_to_bbox(ground_truth, anchors, device, iou_threshold=0.5):"""将最接近的真实边界框分配给锚框"""num_anchors, num_gt_boxes = anchors.shape[0], ground_truth.shape[0]# 位于第i行和第j列的元素x_ij是锚框i和真实边界框j的IoUjaccard = box_iou(anchors, ground_truth)# 对于每个锚框,分配的真实边界框的张量anchors_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long,device=device)# 根据阈值,决定是否分配真实边界框max_ious, indices = torch.max(jaccard, dim=1)anc_i = torch.nonzero(max_ious >= iou_threshold).reshape(-1)box_j = indices[max_ious >= iou_threshold]anchors_bbox_map[anc_i] = box_jcol_discard = torch.full((num_anchors,), -1)row_discard = torch.full((num_gt_boxes,), -1)for _ in range(num_gt_boxes):max_idx = torch.argmax(jaccard)box_idx = (max_idx % num_gt_boxes).long()anc_idx = (max_idx / num_gt_boxes).long()anchors_bbox_map[anc_idx] = box_idxjaccard[:, box_idx] = col_discardjaccard[anc_idx, :] = row_discardreturn anchors_bbox_map
3.2标记类别和偏移量
#@save
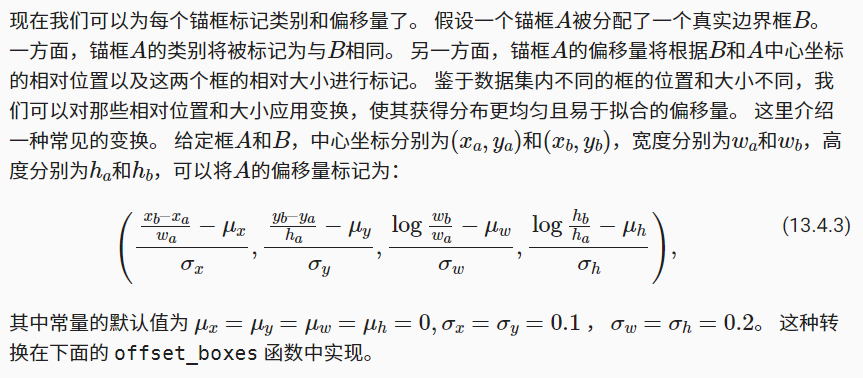
def offset_boxes(anchors, assigned_bb, eps=1e-6):"""对锚框偏移量的转换"""c_anc = d2l.box_corner_to_center(anchors)c_assigned_bb = d2l.box_corner_to_center(assigned_bb)offset_xy = 10 * (c_assigned_bb[:, :2] - c_anc[:, :2]) / c_anc[:, 2:]offset_wh = 5 * torch.log(eps + c_assigned_bb[:, 2:] / c_anc[:, 2:])offset = torch.cat([offset_xy, offset_wh], axis=1)return offset

#@save
def multibox_target(anchors, labels):"""使用真实边界框标记锚框"""batch_size, anchors = labels.shape[0], anchors.squeeze(0)batch_offset, batch_mask, batch_class_labels = [], [], []device, num_anchors = anchors.device, anchors.shape[0]for i in range(batch_size):label = labels[i, :, :]anchors_bbox_map = assign_anchor_to_bbox(label[:, 1:], anchors, device)bbox_mask = ((anchors_bbox_map >= 0).float().unsqueeze(-1)).repeat(1, 4)# 将类标签和分配的边界框坐标初始化为零class_labels = torch.zeros(num_anchors, dtype=torch.long,device=device)assigned_bb = torch.zeros((num_anchors, 4), dtype=torch.float32,device=device)# 使用真实边界框来标记锚框的类别。# 如果一个锚框没有被分配,标记其为背景(值为零)indices_true = torch.nonzero(anchors_bbox_map >= 0)bb_idx = anchors_bbox_map[indices_true]class_labels[indices_true] = label[bb_idx, 0].long() + 1assigned_bb[indices_true] = label[bb_idx, 1:]# 偏移量转换offset = offset_boxes(anchors, assigned_bb) * bbox_maskbatch_offset.append(offset.reshape(-1))batch_mask.append(bbox_mask.reshape(-1))batch_class_labels.append(class_labels)bbox_offset = torch.stack(batch_offset)bbox_mask = torch.stack(batch_mask)class_labels = torch.stack(batch_class_labels)return (bbox_offset, bbox_mask, class_labels)
3.3举例
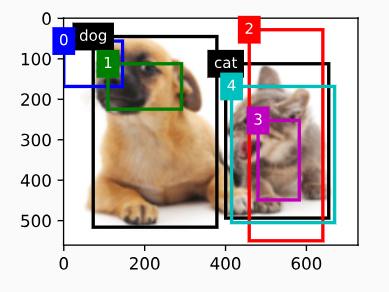
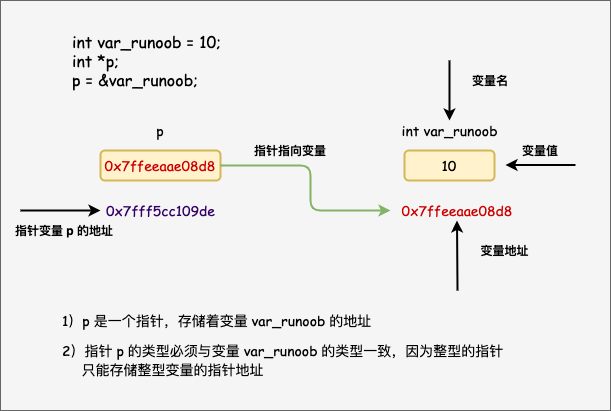
下面通过一个具体的例子来说明锚框标签。 我们已经为加载图像中的狗和猫定义了真实边界框,其中第一个元素是类别(0代表狗,1代表猫),其余四个元素是左上角和右下角的(x,y)轴坐标(范围介于0和1之间)。我们还构建了五个锚框,用左上角和右下角的坐标进行标记:A0,…A4(索引从0开始),然后我们在图像中绘制这些真实边界框和锚框
ground_truth = torch.tensor([[0, 0.1, 0.08, 0.52, 0.92],[1, 0.55, 0.2, 0.9, 0.88]])
anchors = torch.tensor([[0, 0.1, 0.2, 0.3], [0.15, 0.2, 0.4, 0.4],[0.63, 0.05, 0.88, 0.98], [0.66, 0.45, 0.8, 0.8],[0.57, 0.3, 0.92, 0.9]])fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, ground_truth[:, 1:] * bbox_scale, ['dog', 'cat'], 'k')
show_bboxes(fig.axes, anchors * bbox_scale, ['0', '1', '2', '3', '4']);
使用上面定义的multibox_target函数,我们可以根据狗和猫的真实边界框,标注这些锚框的分类和偏移量。 在这个例子中,背景、狗和猫的类索引分别为0、1和2。 下面我们为锚框和真实边界框样本添加一个维度
labels = multibox_target(anchors.unsqueeze(dim=0),ground_truth.unsqueeze(dim=0))
返回的结果中有三个元素,都是张量格式。第三个元素包含标记的输入锚框的类别。
labels[2]'''
tensor([[0, 1, 2, 0, 2]])
'''
返回的第二个元素是掩码(mask)变量,形状为(批量大小,锚框数的四倍)。 掩码变量中的元素与每个锚框的4个偏移量一一对应。 由于我们不关心对背景的检测,负类的偏移量不应影响目标函数。 通过元素乘法,掩码变量中的零将在计算目标函数之前过滤掉负类偏移量。
labels[1]'''
tensor([[0., 0., 0., 0., 1., 1., 1., 1., 1., 1., 1., 1., 0., 0., 0., 0., 1., 1.,1., 1.]])
'''
返回的第一个元素包含了为每个锚框标记的四个偏移值。 请注意,负类锚框的偏移量被标记为零
labels[0]
'''
tensor([[-0.00e+00, -0.00e+00, -0.00e+00, -0.00e+00, 1.40e+00, 1.00e+01,2.59e+00, 7.18e+00, -1.20e+00, 2.69e-01, 1.68e+00, -1.57e+00,-0.00e+00, -0.00e+00, -0.00e+00, -0.00e+00, -5.71e-01, -1.00e+00,4.17e-06, 6.26e-01]])
'''
4.使用非极大值抑制预测边界框
在预测时,我们先为图像生成多个锚框,再为这些锚框一一预测类别和偏移量。 一个预测好的边界框则根据其中某个带有预测偏移量的锚框而生成。 下面我们实现了offset_inverse函数,该函数将锚框和偏移量预测作为输入,并应用逆偏移变换来返回预测的边界框坐标。
#@save
def offset_inverse(anchors, offset_preds):"""根据带有预测偏移量的锚框来预测边界框"""anc = d2l.box_corner_to_center(anchors)pred_bbox_xy = (offset_preds[:, :2] * anc[:, 2:] / 10) + anc[:, :2]pred_bbox_wh = torch.exp(offset_preds[:, 2:] / 5) * anc[:, 2:]pred_bbox = torch.cat((pred_bbox_xy, pred_bbox_wh), axis=1)predicted_bbox = d2l.box_center_to_corner(pred_bbox)return predicted_bbox

以下nms函数按降序对置信度进行排序并返回其索引。
#@save
def nms(boxes, scores, iou_threshold):"""对预测边界框的置信度进行排序"""B = torch.argsort(scores, dim=-1, descending=True)keep = [] # 保留预测边界框的指标while B.numel() > 0:i = B[0]keep.append(i)if B.numel() == 1: breakiou = box_iou(boxes[i, :].reshape(-1, 4),boxes[B[1:], :].reshape(-1, 4)).reshape(-1)inds = torch.nonzero(iou <= iou_threshold).reshape(-1)B = B[inds + 1]return torch.tensor(keep, device=boxes.device)
我们定义以下multibox_detection函数来将非极大值抑制应用于预测边界框。 这里的实现有点复杂,请不要担心。我们将在实现之后,马上用一个具体的例子来展示它是如何工作的。
#@save
def multibox_detection(cls_probs, offset_preds, anchors, nms_threshold=0.5,pos_threshold=0.009999999):"""使用非极大值抑制来预测边界框"""device, batch_size = cls_probs.device, cls_probs.shape[0]anchors = anchors.squeeze(0)num_classes, num_anchors = cls_probs.shape[1], cls_probs.shape[2]out = []for i in range(batch_size):cls_prob, offset_pred = cls_probs[i], offset_preds[i].reshape(-1, 4)conf, class_id = torch.max(cls_prob[1:], 0)predicted_bb = offset_inverse(anchors, offset_pred)keep = nms(predicted_bb, conf, nms_threshold)# 找到所有的non_keep索引,并将类设置为背景all_idx = torch.arange(num_anchors, dtype=torch.long, device=device)combined = torch.cat((keep, all_idx))uniques, counts = combined.unique(return_counts=True)non_keep = uniques[counts == 1]all_id_sorted = torch.cat((keep, non_keep))class_id[non_keep] = -1class_id = class_id[all_id_sorted]conf, predicted_bb = conf[all_id_sorted], predicted_bb[all_id_sorted]# pos_threshold是一个用于非背景预测的阈值below_min_idx = (conf < pos_threshold)class_id[below_min_idx] = -1conf[below_min_idx] = 1 - conf[below_min_idx]pred_info = torch.cat((class_id.unsqueeze(1),conf.unsqueeze(1),predicted_bb), dim=1)out.append(pred_info)return torch.stack(out)
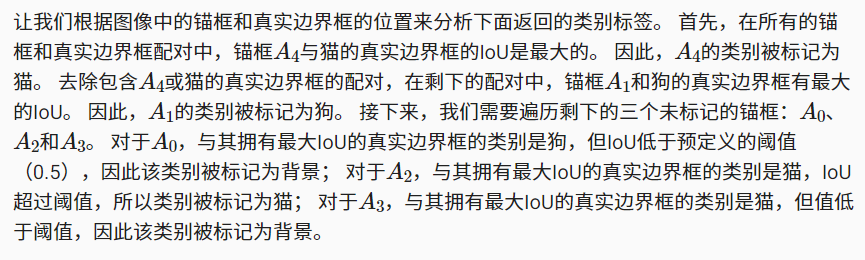
现在让我们将上述算法应用到一个带有四个锚框的具体示例中。 为简单起见,我们假设预测的偏移量都是零,这意味着预测的边界框即是锚框。 对于背景、狗和猫其中的每个类,我们还定义了它的预测概率。
anchors = torch.tensor([[0.1, 0.08, 0.52, 0.92], [0.08, 0.2, 0.56, 0.95],[0.15, 0.3, 0.62, 0.91], [0.55, 0.2, 0.9, 0.88]])
offset_preds = torch.tensor([0] * anchors.numel())
cls_probs = torch.tensor([[0] * 4, # 背景的预测概率[0.9, 0.8, 0.7, 0.1], # 狗的预测概率[0.1, 0.2, 0.3, 0.9]]) # 猫的预测概率
我们可以在图像上绘制这些预测边界框和置信度。
fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, anchors * bbox_scale,['dog=0.9', 'dog=0.8', 'dog=0.7', 'cat=0.9'])
现在我们可以调用multibox_detection函数来执行非极大值抑制,其中阈值设置为0.5。 请注意,我们在示例的张量输入中添加了维度。
我们可以看到返回结果的形状是(批量大小,锚框的数量,6)。 最内层维度中的六个元素提供了同一预测边界框的输出信息。 第一个元素是预测的类索引,从0开始(0代表狗,1代表猫),值-1表示背景或在非极大值抑制中被移除了。 第二个元素是预测的边界框的置信度。 其余四个元素分别是预测边界框左上角和右下角的(x,y)轴坐标(范围介于0和1之间)
output = multibox_detection(cls_probs.unsqueeze(dim=0),offset_preds.unsqueeze(dim=0),anchors.unsqueeze(dim=0),nms_threshold=0.5)
output'''
tensor([[[ 0.00, 0.90, 0.10, 0.08, 0.52, 0.92],[ 1.00, 0.90, 0.55, 0.20, 0.90, 0.88],[-1.00, 0.80, 0.08, 0.20, 0.56, 0.95],[-1.00, 0.70, 0.15, 0.30, 0.62, 0.91]]])
'''
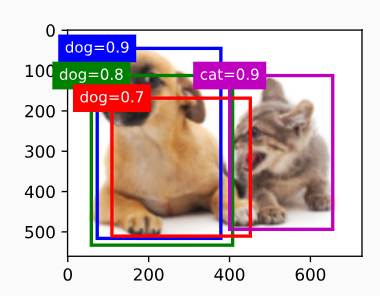
删除-1类别(背景)的预测边界框后,我们可以输出由非极大值抑制保存的最终预测边界框。
fig = d2l.plt.imshow(img)
for i in output[0].detach().numpy():if i[0] == -1:continuelabel = ('dog=', 'cat=')[int(i[0])] + str(i[1])show_bboxes(fig.axes, [torch.tensor(i[2:]) * bbox_scale], label)
实践中,在执行非极大值抑制前,我们甚至可以将置信度较低的预测边界框移除,从而减少此算法中的计算量。 我们也可以对非极大值抑制的输出结果进行后处理。例如,只保留置信度更高的结果作为最终输出。
总结:
- 一类目标检测算法基于锚框来预测
- 首先生成大量锚框,并赋予标号,每个锚框作为一个样本进行训练
- 在预测时,使用NMS来去掉冗余的预测
相关文章:
【动手学深度学习】--21.锚框
锚框 学习视频:锚框【动手学深度学习v2】 官方笔记:锚框 1.锚框 目标检测算法通常会在输入图像中采样大量的区域,然后判断这些区域中是否包含我们感兴趣的目标,并调整区域边界从而更准确地预测目标的真实边界框(gro…...
C语言学习笔记(完整版)
文章目录 算法算法的基本概念算法的特征算法的优劣 描述算法三种基本结构流程图N-S流程图伪代码 常量和变量了解数据类型常量整形常量实型常量字符型常量转义字符符号常量 变量整形变量实型变量字符型变量 表达式与运算符赋值运算符和赋值表达式变量赋初值强制类型转换 算术运算…...

【Unity3D赛车游戏】【四】在Unity中添加阿克曼转向,下压力,质心会让汽车更稳定
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:Uni…...

Python爬虫requests判断请求超时并重新post/get发送请求
在使用Python爬虫中,你可以使用requestsimport requests #Python爬虫requests判断请求超时并重新post发送请求,proxies为代理 def send_request_post(url, data, headers , proxies , max_retries3, timeout5):retries 0while retries < max_retries…...

CSS中如何实现多列布局?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 多列布局(Multi-column Layout)⭐ column-count⭐ column-width⭐ column-gap⭐ column-rule⭐ column-span⭐ 示例⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧…...

【C++】string简单实用详解
本片要分享的内容是有关于string的知识,在这之前得介绍一下什么是STL; 目录 1.STL简单介绍 2. string简单介绍 3.string简单使用 3.1.string的定义 3.2.字符串的拼接 3.3.string的遍历 3.3.1.循环遍历 3.3.2.迭代器遍历 4.string的函数构造 1.…...
opencv 进阶16-基于FAST特征和BRIEF描述符的ORB(图像匹配)
在计算机视觉领域,从图像中提取和匹配特征的能力对于对象识别、图像拼接和相机定位等任务至关重要。实现这一目标的一种流行方法是 ORB(Oriented FAST and Rotated Brief)特征检测器和描述符。ORB 由 Ethan Rublee 等人开发,结合了…...
Unity 类Scene窗口相机控制
类Scene窗口相机控制 🍔效果 🍔效果 传送门👈...
juc基础(三)
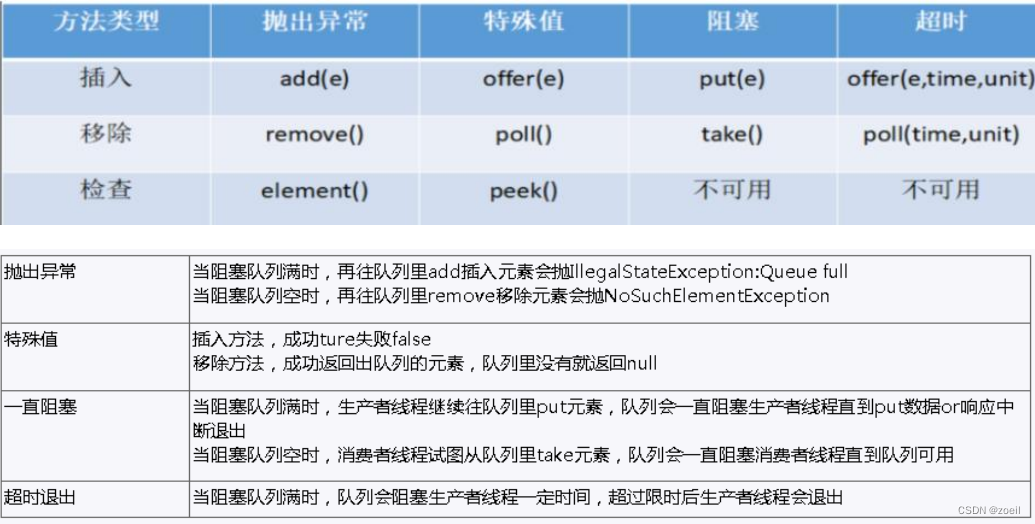
目录 一、读写锁 1、读写锁介绍 2、ReentrantReadWriteLock 3、例子 4、小结 二、阻塞队列 1、BlockingQueue 简介 2、BlockingQueue 核心方法 3、案例 4、常见的 BlockingQueue (1)ArrayBlockingQueue(常用) (2)Li…...
c语言函数指针和指针函数的区别,以及回调函数的使用。
函数指针是什么,函数指针本质也是指针,不过是指向函数的指针,存储的是函数的地址。 指针函数是什么,指针函数其实就是返回值是指针的函数,本质是函数。 函数指针是如何定义的呢,如下 void (*pfun)(int a,int b) 这…...

什么是服务端渲染?前后端分离的优点和缺点?
一.概念 服务端渲染简单点就是服务端直接返回给客户端一个完整的页面,也就是一个完整的html页面,这个页面上已经有数据了。说到这里你可能会觉得后端怎么写页面啊,而且服务端返回页面不是加载更慢吗?错了,因为我们现在…...

【Java】优化重复冗余代码的8种方式
文章目录 前言1. 抽取公用方法2. 抽工具类3. 反射4.泛型5. 继承与多态6.使用设计模式7.自定义注解(或者说AOP面向切面)8.函数式接口和Lambda表达式 前言 日常开发中,我们经常会遇到一些重复代码。大家都知道重复代码不好,它主要有这些缺点:可…...
rabbitmq卸载重新安装3.8版本
卸载之前的版本的rabbitmq 卸载rabbitmq 卸载前先停止rabbitmq服务 /usr/lib/rabbitmq/bin/rabbitmqctl stop查看rabbitmq安装的相关列表 yum list | grep rabbitmq卸载rabbitmq相关内容 yum -y remove rabbitmq-server.noarch 卸载erlang 查看erlang安装的相关列表 …...
MyBatis分页思想和特殊字符
目录 一、MyBatis分页思想 1.1 使用场景 1.2 代码演示 二、MyBatis特殊字符 2.1代码演示 一、MyBatis分页思想 1.1 使用场景 Mybatis分页应用场景: MyBatis是一个Java持久层框架,它提供了一种将SQL查询和结果映射到Java对象的简单方式。分页是MyBa…...
设计模式大白话——命令模式
命令模式 一、概述二、经典举例三、代码示例(Go)四、总结 一、概述 顾名思义,命令模式其实和现实生活中直接下命令的动作类似,怎么理解这个命令是理解命令模式的关键!!!直接说结论是很不负责…...
[线程/C++(11)]线程池
文章目录 一、C实现线程池1. 头文件2. 测试部分 二、C11实现线程池1. 头文件2. 测试部分 一、C实现线程池 1. 头文件 #define _CRT_SECURE_NO_WARNINGS #pragma once #include<iostream> #include<string.h> #include<string> #include<pthread.h> #…...
VR防地质灾害安全教育:增强自然灾害知识,提高自我保护意识
VR防地质灾害安全教育系统是一种虚拟仿真技术,可以通过虚拟现实技术模拟地震、泥石流、滑坡等地质灾害的发生和应对过程,帮助人们提高应对突发自然灾害的能力。这种系统的优势在于可以增强自然灾害知识,提高自我保护意识,锻炼人们…...

Mybatis多对多查询案例!
在MyBatis中执行多对多查询需要使用两个主要表和一个连接表(通常称为关联表)来演示。在这个示例中,我们将使用一个示例数据库模型,其中有三个表:students、courses 和 student_courses,它们之间建立了多对多…...
Android OpenCV(七十五): 看看刚”转正“的条形码识别
前言 2021年,我们写过一篇《OpenCV 条码识别 Android 平台实践》,当时的条形码识别模块位于 opencv_contrib 仓库,但是 OpenCV 4.8.0 版本开始, 条形码识别模块已移动到 OpenCV 主仓库,至此我们无需自行编译即可轻松地调用条形码识别能力。 Bar code detector and decoder…...
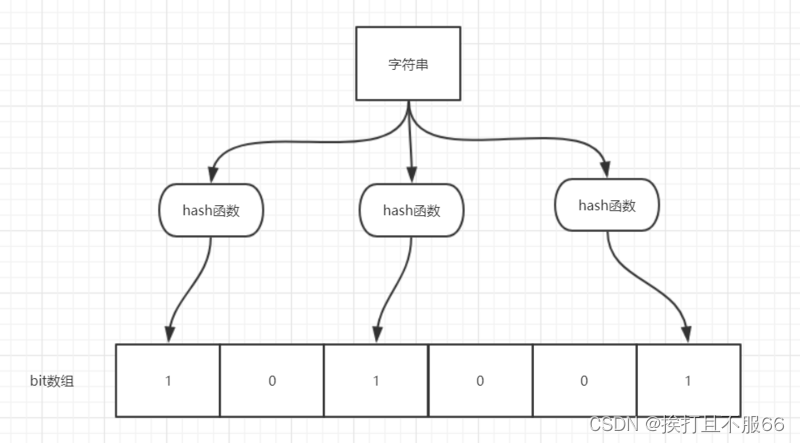
数据结构——布隆计算器
文章目录 1.什么是布隆过滤器?2.布隆过滤器的原理介绍3.布隆过滤器使用场景4.通过 Java 编程手动实现布隆过滤器5.利用Google开源的 Guava中自带的布隆过滤器6.Redis 中的布隆过滤器6.1介绍6.2使用Docker安装6.3常用命令一览6.4实际使用 1.什么是布隆过滤器…...

微信QQ防撤回终极指南:RevokeMsgPatcher技术深度解析
微信QQ防撤回终极指南:RevokeMsgPatcher技术深度解析 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gitcode.com…...

反向Shell隐藏技术深度解析:从进程伪装到网络隐匿的攻防实践
1. 项目概述:从“隐藏”到“隐匿”的攻防博弈在网络安全领域,反向Shell是一种经典且常见的远程控制手段。简单来说,它让被控端主动连接控制端,从而绕过防火墙等入站限制。然而,一个明晃晃的、持续存在的网络连接或进程…...

如何零成本获取全球金融数据?开源工具AKShare终极指南
如何零成本获取全球金融数据?开源工具AKShare终极指南 【免费下载链接】akshare AKShare is an elegant and simple financial data interface library for Python, built for human beings! 开源财经数据接口库 项目地址: https://gitcode.com/gh_mirrors/aks/ak…...
)
OpenClaw 接入 DeepSeek 模型完整配置教程(2026 最新版)
OpenClaw 接入 DeepSeek 模型完整配置教程 一、前置准备 已安装并正常运行 OpenClaw Windows 客户端;OpenClaw 顶部 Gateway 状态保持在线;电脑网络正常,可稳定访问 DeepSeek 开放平台;准备可接收验证码的手机号或微信账号&…...

Diablo Edit2完全指南:暗黑破坏神2存档修改器终极使用教程
Diablo Edit2完全指南:暗黑破坏神2存档修改器终极使用教程 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 你是否曾经在暗黑破坏神2中花费数小时刷装备却一无所获?或者想要…...

如何一键清理Windows冗余驱动:Driver Store Explorer完全指南
如何一键清理Windows冗余驱动:Driver Store Explorer完全指南 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer 你是否发现C盘空间不知不觉就满了?Windows系统在C:…...

【2026】记录在windows编译llama.cpp步骤,AMD CPU本地部署千问3.5本地大模型,内存占用低
前言 我的电脑是AMD的32G内存,没有GPU,偏要玩一玩千问3.5本地大语言模型,github上下载的llama安装包,无法使用,只有自己编译试试了。注意我是编译CPU版本的,你有GPU这篇别看了。 以下是我的CPU型号: 1.…...

快速解密QQ音乐加密文件:qmc-decoder完整指南
快速解密QQ音乐加密文件:qmc-decoder完整指南 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder 还在为QQ音乐下载的.qmc、.qmc3、.qmcflac格式文件无法在其他播放…...

3分钟掌握MPC Video Renderer:免费开启Windows高清视频播放新体验
3分钟掌握MPC Video Renderer:免费开启Windows高清视频播放新体验 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer 你是否厌倦了Windows系统上平淡无奇的视频播放效…...

Windows安卓子系统终极指南:5步打造完美移动应用体验
Windows安卓子系统终极指南:5步打造完美移动应用体验 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA 想在Windows电脑上流畅运行手机应用吗&…...