自动驾驶SLAM技术第四章习题2
在g2o的基础上改成ceres优化,高博都写好了其他的部分, 后面改ceres就很简单了. 这块我用的是ceres的自动求导,很方便,就是转化为模板仿函数的时候有点麻烦, 代码部分如下
ceres_type.h : ceres优化核心库的头文件
这个文件写的内容ceres优化的残差块. 把i, j时刻的状态都写成15维的数组, 顺序是r,p,v,bg,ba. 每个元素都是3维的, 所以r 部分涉及到R->r转换, sophus都实现好了.
/*** @file ceres_types.cc* @author Frank Zhang (tanhaozhang@connect.polyu.hk)* @brief * @version 0.1* @date 2023-08-15* * @copyright Copyright (c) 2023* */#ifndef SLAM_IN_AUTO_DRIVING_CH4_CERES_TYPE_H_
#define SLAM_IN_AUTO_DRIVING_CH4_CERES_TYPE_H_#include <glog/logging.h>#include "common/eigen_types.h"
#include "ceres/ceres.h"
#include "thirdparty/sophus/sophus/so3.hpp"
#include "ch4/imu_preintegration.h"namespace sad
{namespace ceres_optimization
{class PreintegrationCostFunctionCore {public:PreintegrationCostFunctionCore(std::shared_ptr<sad::IMUPreintegration> imu_preinit, const Eigen::Vector3d gravaty): preinit_(imu_preinit), dt_(imu_preinit->dt_), grav_(gravaty) {}template <typename T>bool operator()(const T* const i, const T* const j, T* residual) const {Eigen::Matrix<T, 3, 1> r_i(i[0], i[1], i[2]);Eigen::Matrix<T, 3, 1> r_j(j[0], j[1], j[2]);Eigen::Matrix<T, 3, 1> p_i(i[3], i[4], i[5]);Eigen::Matrix<T, 3, 1> p_j(j[3], j[4], j[5]);Eigen::Matrix<T, 3, 1> v_i(i[6], i[7], i[8]);Eigen::Matrix<T, 3, 1> v_j(j[6], j[7], j[8]);Eigen::Matrix<T, 3, 1> bg(i[9], i[10], i[11]);Eigen::Matrix<T, 3, 1> ba(i[12], i[13], i[14]);Sophus::SO3<double> dR = preinit_->GetDeltaRotation(preinit_->bg_);Eigen::Matrix<double, 3, 1> dvd = preinit_->GetDeltaVelocity(preinit_->bg_, preinit_->ba_);Eigen::Matrix<T, 3, 1> dv(T(dvd.x()), T(dvd.y()), T(dvd.z()));Eigen::Matrix<double, 3, 1> dpd = preinit_->GetDeltaPosition(preinit_->bg_, preinit_->ba_);Eigen::Matrix<T, 3, 1> dp(T(dpd.x()), T(dpd.y()), T(dpd.z()));Sophus::SO3<T, 0> R_i = Sophus::SO3<T, 0>::exp(r_i);Sophus::SO3<T, 0> R_j = Sophus::SO3<T, 0>::exp(r_j);Eigen::Matrix<T, 3, 1> grav(T(grav_.x()), T(grav_.y()), T(grav_.z()));Eigen::Matrix<T, 3, 1> er = (dR.inverse() * R_i.inverse() * R_j).log();Eigen::Matrix<T, 3, 3> RiT = R_i.matrix();Eigen::Matrix<T, 3, 1> ev = RiT * (v_j - v_i - grav * T(dt_)) - dv;Eigen::Matrix<T, 3, 1> ep = RiT * (p_j - p_i - v_i * T(dt_) - grav * T(dt_) * T(dt_) * T(0.5)) - dp;residual[0] = T(er[0]);residual[1] = T(er[1]);residual[2] = T(er[2]);residual[3] = T(ev[0]);residual[4] = T(ev[1]);residual[5] = T(ev[2]);residual[6] = T(ep[0]);residual[7] = T(ep[1]);residual[8] = T(ep[2]);return true;}private:const double dt_;std::shared_ptr<sad::IMUPreintegration> preinit_ = nullptr;const Eigen::Vector3d grav_;};ceres::CostFunction* CreatePreintegrationCostFunction(std::shared_ptr<sad::IMUPreintegration> imu_preinit, const Eigen::Vector3d gravaty) {return new ceres::AutoDiffCostFunction<PreintegrationCostFunctionCore, 9, 15, 15>(new PreintegrationCostFunctionCore(imu_preinit, gravaty));}class BiasCostFunctionCore {public:BiasCostFunctionCore(){}template <typename T>bool operator() (const T* const i, const T* const j, T* residual) const{Eigen::Matrix<T, 3, 1> bg_i(i[9], i[10], i[11]);Eigen::Matrix<T, 3, 1> bg_j(j[9], j[10], j[11]);Eigen::Matrix<T, 3, 1> ba_i(i[12], i[13], i[14]);Eigen::Matrix<T, 3, 1> ba_j(j[12], j[13], j[14]);Eigen::Matrix<T, 3, 1> d_ba = ba_j - ba_i;Eigen::Matrix<T, 3, 1> d_bg = bg_j - bg_i;residual[0] = T(d_ba[0]);residual[1] = T(d_ba[1]);residual[2] = T(d_ba[2]);residual[3] = T(d_bg[0]);residual[4] = T(d_bg[1]);residual[5] = T(d_bg[2]);return true;}};ceres::CostFunction* CreateBiasCostFunction() {return new ceres::AutoDiffCostFunction<BiasCostFunctionCore, 6, 15, 15>(new BiasCostFunctionCore());}class PriorCostFunctionCore {public:PriorCostFunctionCore(const std::shared_ptr<sad::NavStated> prior) : prior_(prior) {}template <typename T>bool operator()(const T* const i, T* residual) const {Eigen::Vector3d prior_r_d = prior_->R_.log();Eigen::Vector3d prior_p_d = prior_->p_;Eigen::Vector3d prior_v_d = prior_->v_;Eigen::Vector3d prior_bg_d = prior_->bg_;Eigen::Vector3d prior_ba_d = prior_->ba_;Eigen::Matrix<double, 15, 1> prior_M;prior_M << prior_r_d, prior_p_d, prior_v_d, prior_bg_d, prior_ba_d;for (int temp = 0; temp < prior_M.size(); temp++){residual[temp] = T(prior_M[temp]) - i[temp];}return true;}private:const std::shared_ptr<sad::NavStated> prior_;};ceres::CostFunction* CreatePriorCostFunction(const std::shared_ptr<sad::NavStated> prior) {return new ceres::AutoDiffCostFunction<PriorCostFunctionCore, 15, 15>(new PriorCostFunctionCore(prior));}class GnssCostFunctionCore {public:GnssCostFunctionCore(const Sophus::SE3d gnss_states) : gnss_states_(gnss_states){}template <typename T>bool operator() (const T* const i, T* residual) const{Eigen::Matrix<T, 3, 1> r_i(i[0], i[1], i[2]);Sophus::SO3<T, 0> R_i = Sophus::SO3<T, 0>::exp(r_i);Eigen::Matrix<T, 3, 1> t_i(i[3], i[4], i[5]);Eigen::Matrix<T, 3, 1> e_r = (gnss_states_.so3().inverse() * R_i).log();Eigen::Matrix<T, 3, 1> e_t = t_i - gnss_states_.translation();residual[0] = T(e_r[0]);residual[1] = T(e_r[1]);residual[2] = T(e_r[2]);residual[3] = T(e_t[0]);residual[4] = T(e_t[1]);residual[5] = T(e_t[2]);return true;}private:const Sophus::SE3d gnss_states_;};static ceres::CostFunction* CreateGnssCostFunction(const Sophus::SE3d gnss_states){return new ceres::AutoDiffCostFunction<GnssCostFunctionCore, 6, 15> (new GnssCostFunctionCore(gnss_states));}class OdomCostFunctionCore {public:OdomCostFunctionCore(const Eigen::Vector3d odom_speed_states) : odom_speed_states_(odom_speed_states) {}template <typename T>bool operator() (const T* const j, T* residual ) const {Eigen::Matrix<T, 3, 1> vj(j[6], j[7], j[8]);residual[0] = T(vj[0] - odom_speed_states_[0]);residual[1] = T(vj[1] - odom_speed_states_[1]);residual[2] = T(vj[2] - odom_speed_states_[2]);return true;}private:const Eigen::Vector3d odom_speed_states_;};static ceres::CostFunction* CreatOdomCostFunction(const Eigen::Vector3d odom_speed_states) {return new ceres::AutoDiffCostFunction<OdomCostFunctionCore, 3, 15> (new OdomCostFunctionCore(odom_speed_states));}} // namespace ceres_optimization} //namespace sad#endif
上面代码分别实现了预积分, bias, 先验, GNSS, odom的残差以及其工厂函数. 不得不说啊, ceres自动求导用起来真简单.
gins_pre_integ.cc: 实现ceres预积分优化
这一部分调用上面头文件构造的工厂函数实现残差计算, ceres优化与更新. 这里只粘贴一下不同的地方
else {LOG_FIRST_N(INFO, 1) << "Using Ceres to Solve!";ceres::Problem problem;Eigen::Vector3d last_r_vec = last_frame_->R_.log();Eigen::Vector3d current_r_vec = this_frame_->R_.log();double last_state[15] = {last_r_vec.x(), last_r_vec.y(), last_r_vec.z(), last_frame_->p_.x(),last_frame_->p_.y(), last_frame_->p_.z(), last_frame_->v_.x(), last_frame_->v_.y(), last_frame_->v_.z(), last_frame_->bg_.x(), last_frame_->bg_.y(), last_frame_->bg_.z(), last_frame_->ba_.x(), last_frame_->ba_.y(), last_frame_->ba_.z()};double current_state[15] = {current_r_vec.x(), current_r_vec.y(), current_r_vec.z(),this_frame_->p_.x(), this_frame_->p_.y(), this_frame_->p_.z(),this_frame_->v_.x(), this_frame_->v_.y(), this_frame_->v_.z(),this_frame_->bg_.x(), this_frame_->bg_.y(), this_frame_->bg_.z(),this_frame_->ba_.x(), this_frame_->ba_.y(), this_frame_->ba_.z()};//预积分problem.AddResidualBlock(ceres_optimization::CreatePreintegrationCostFunction(pre_integ_, options_.gravity_), nullptr, last_state, current_state);// 两个零偏problem.AddResidualBlock(ceres_optimization::CreateBiasCostFunction(), nullptr, last_state, current_state);//GNSSproblem.AddResidualBlock(ceres_optimization::CreateGnssCostFunction(last_gnss_.utm_pose_), nullptr, last_state);problem.AddResidualBlock(ceres_optimization::CreateGnssCostFunction(this_gnss_.utm_pose_), nullptr,current_state);//先验problem.AddResidualBlock(ceres_optimization::CreatePriorCostFunction(last_frame_), nullptr, last_state);//ODOMVec3d vel_world = Vec3d::Zero();Vec3d vel_odom = Vec3d::Zero();if (last_odom_set_) {// velocity obsdouble velo_l = options_.wheel_radius_ * last_odom_.left_pulse_ /options_.circle_pulse_ * 2 * M_PI /options_.odom_span_;double velo_r = options_.wheel_radius_ * last_odom_.right_pulse_ /options_.circle_pulse_ * 2 * M_PI /options_.odom_span_;double average_vel = 0.5 * (velo_l + velo_r);vel_odom = Vec3d(average_vel, 0.0, 0.0);vel_world = this_frame_->R_ * vel_odom;problem.AddResidualBlock(ceres_optimization::CreatOdomCostFunction(vel_world), nullptr, current_state);// 重置odom数据到达标志位,等待最新的odom数据last_odom_set_ = false;}ceres::Solver::Options options;options.linear_solver_type = ceres::SPARSE_NORMAL_CHOLESKY;options.max_num_iterations = 20;options.num_threads = 4;options.minimizer_progress_to_stdout = false;ceres::Solver::Summary summary;ceres::Solve(options, &problem, &summary);Eigen::Vector3d last_r(last_state[0], last_state[1], last_state[2]);last_frame_->R_ = Sophus::SO3d::exp(last_r);Eigen::Vector3d last_t(last_state[3], last_state[4], last_state[5]);last_frame_->p_ = last_t;Eigen::Vector3d last_v(last_state[6], last_state[7], last_state[8]);last_frame_->v_ = last_v;Eigen::Vector3d last_bg(last_state[9], last_state[10], last_state[11]);last_frame_->bg_ = last_bg;Eigen::Vector3d last_ba(last_state[12], last_state[13], last_state[14]);last_frame_->ba_ = last_ba;Eigen::Vector3d current_r(current_state[0], current_state[1], current_state[2]);this_frame_->R_ = Sophus::SO3d::exp(current_r);Eigen::Vector3d current_t(current_state[3], current_state[4], current_state[5]);this_frame_->p_ = current_t;Eigen::Vector3d current_v(current_state[6], current_state[7], current_state[8]);this_frame_->v_ = current_v;Eigen::Vector3d current_bg(current_state[9], current_state[10], current_state[11]);this_frame_->bg_ = current_bg;Eigen::Vector3d current_ba(current_state[12], current_state[13], current_state[14]);this_frame_->ba_ = current_ba;}// 重置integoptions_.preinteg_options_.init_bg_ = this_frame_->bg_;options_.preinteg_options_.init_ba_ = this_frame_->ba_;pre_integ_ = std::make_shared<IMUPreintegration>(options_.preinteg_options_);
}
上面部分代码为了使用autodiff做了好多不必要的数据处理, 如果有更好的解题思路欢迎留言.
上面代码分为以下几步: 1. 初始处理 2. 添加残差 3. ceres优化 4. 更新
效果如下
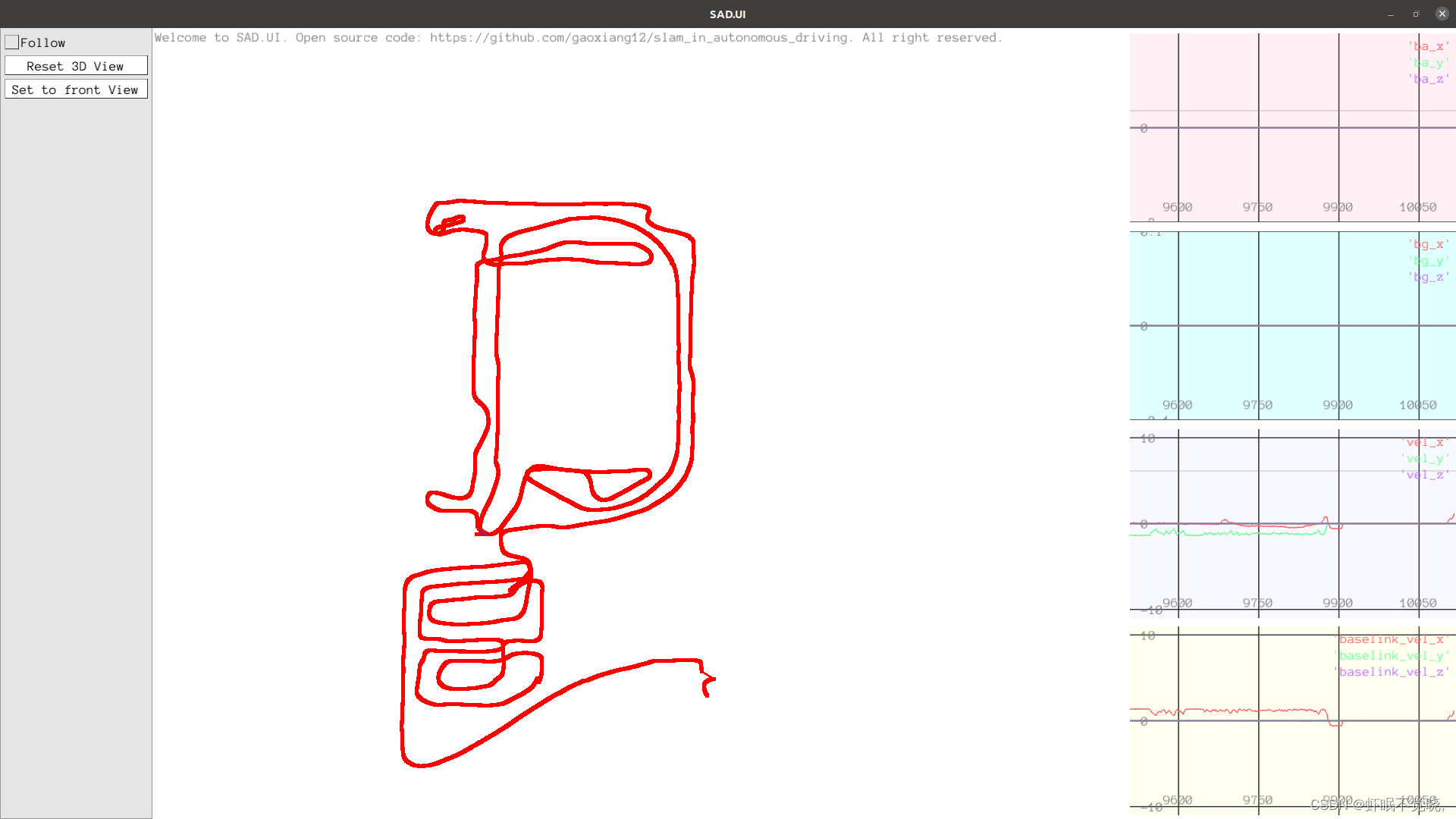
感觉还行, 没有评价精度
问题
没有评价精度是不是比g2o好一些
没有评价算力是不是比g2o小一些
没有实现解析求导, 正在搞
相关文章:
自动驾驶SLAM技术第四章习题2
在g2o的基础上改成ceres优化,高博都写好了其他的部分, 后面改ceres就很简单了. 这块我用的是ceres的自动求导,很方便,就是转化为模板仿函数的时候有点麻烦, 代码部分如下 ceres_type.h : ceres优化核心库的头文件 这个文件写的内…...
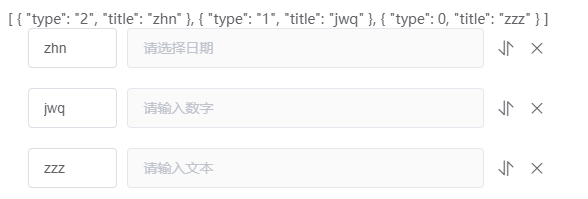
vue拖拽div盒子实现上下拖动互换
vue拖拽div盒子实现上下拖动互换 <div v-for"(item, index) in formList" :key"index" draggable"true"dragstart"handleDragStart($event, item)"dragenter"handleDragEnter($event, item)"dragover.prevent"han…...

Visual Studio 2022 右键单击项目没有出现View | View Class Diagram(Visual Studio 无法使用类设计器)
文章目录 问题描述原因.NET Core项目.NET Framework项目 问题描述 当我们在Solution Explorer窗口右键单击项目时,快捷菜单中没有出现“查看”,或者出现了“查看”,但是“查看”里没有View Class Diagram。 原因 首先你要确保你安装了类设…...

EFCore常见用法
EFCore官方文档置顶,看这个就行。下面的内容只是总结,算是备忘录。 一、创建和删除 //1、创建数据库和表 db.Database.EnsureCreated();//将创建数据库(如果不存在)并初始化数据库架构。 如果存在任何表 (包括另一 DbContext 类)…...
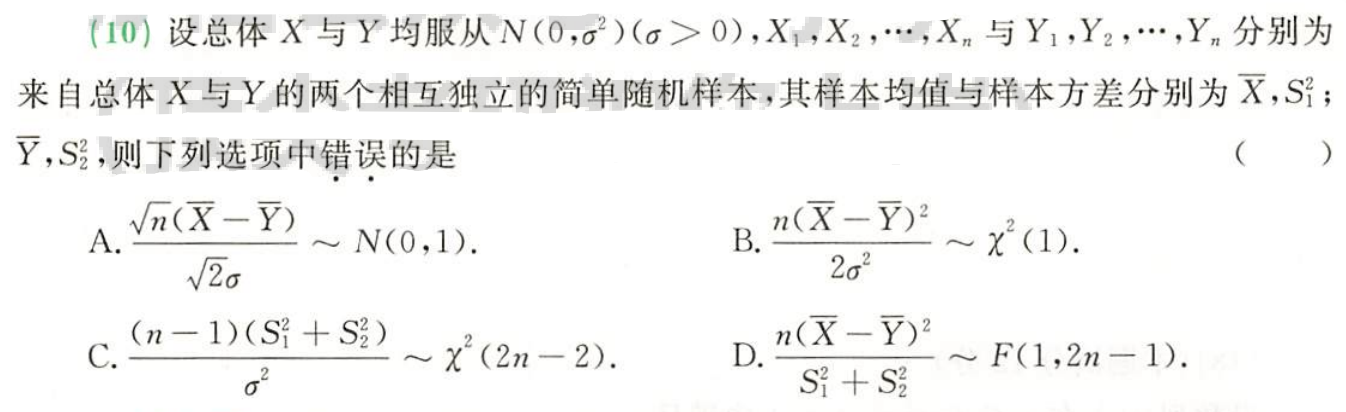
概率论与数理统计:第六章:数理统计
文章目录 Ch6. 数理统计(一) 总体与样本(二) 统计量 (5个)2.5个常用统计量3.矩的概念 (三) 抽样分布 (3个)0.上α分位点1.χ分布2.t分布3.F分布 (四) 抽样分布定理1.单个正态总体2.两个正态总体 Ch6. 数理统计 (一) 总体与样本 1.概念: (1)总体 (2)样本 简单随机…...
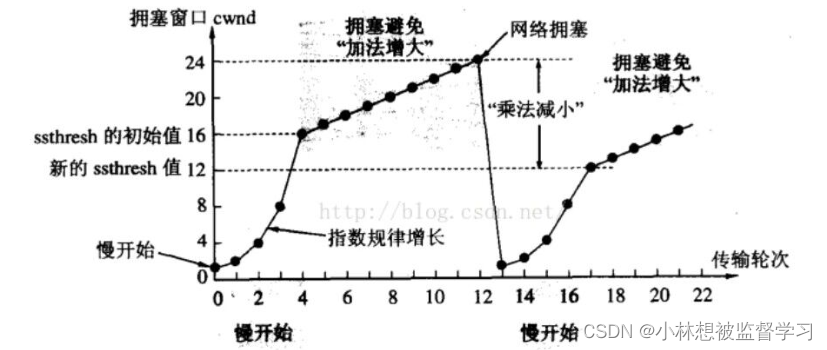
拥塞控制(TCP限制窗口大小的机制)
拥塞控制机制可以使滑动窗口在保证可靠性的前提下,提高传输效率 关于滑动窗口的属性以及部分机制推荐看TCP中窗口和滑动窗口的含义以及流量控制 拥塞控制出现的原因 看了上面推荐的博客我们已经知道了,由于接收方接收数据的能力有限,所以要通…...

校园供水系统智能管理
import pandas as pd data1pd.read_excel("C://Users//JJH//Desktop//E//附件_一季度.xlsx") data2pd.read_excel("C://Users//JJH//Desktop//E//附件_二季度.xlsx") data3pd.read_excel("C://Users//JJH//Desktop//E//附件_三季度.xlsx") data4…...

Flask-SocketIO和Flask-Login联合开发socketio权限系统
设置 Flask, Flask-SocketIO, Flask-Login: 首先,确保安装了必要的库: pip install Flask Flask-SocketIO Flask-Login基础设置: from flask import Flask, render_template, redirect, url_for, request from flask_socketio import SocketIO, emit from flask_…...

航空电子设备中的TSN通讯架构—直升机
前言 以太网正在迅速取代传统网络,成为航空电子设备和任务系统的核心高速网络。本文提出了以太网时间敏感网络(TSN)在航空电子设备上应用的技术优势问题。在实际应用中,TSN已成为一个具有丰富的机制和协议的工具箱,可满足与时间和可靠性相关…...

elment-ui中使用el-steps案例
el-steps案例 样式 代码 <div class"active-box"><div class"active-title">请完善</div><el-steps :active"active" finish-status"success" align-center><el-step title"第一步" /><…...

FPGA解析串口指令控制spi flash完成连续写、读、擦除数据
前言 最近在收拾抽屉时找到一个某宝的spi flash模块,如下图所示,我就想用能不能串口来读写flash,大致过程就是,串口向fpga发送一条指令,fpga解析出指令控制flah,这个指令协议目前就是: 55 AA …...

msvcp120.dll丢失的解决方法,分享三种快速修复的方法
今天,我将和大家分享一个关于电脑问题的解决方法——msvcp120.dll丢失的解决方法。希望对大家有所帮助。 首先,让我们来了解一下msvcp120.dll文件。msvcp120.dll是Microsoft Visual C 2010 Redistributable Package的一个组件,它包含了一些运…...
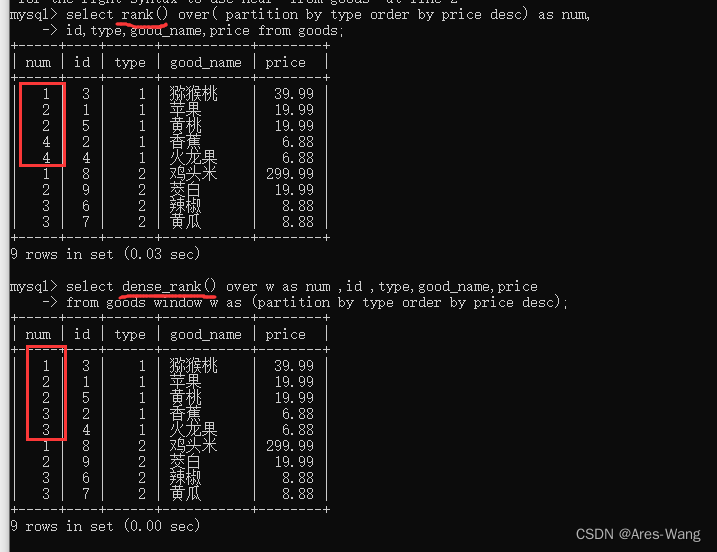
mysql 8.0 窗口函数 之 序号函数 与 sql server 序号函数 一样
sql server 序号函数 序号函数 ROW_NUMBER() 顺序排序RANK() 并列排序,会跳过重复的序号,比如序号为1,1,3DENSE_RANK() 并列排序,不会跳过重复的序号,比如 序号为 1,1,2 语法结构…...
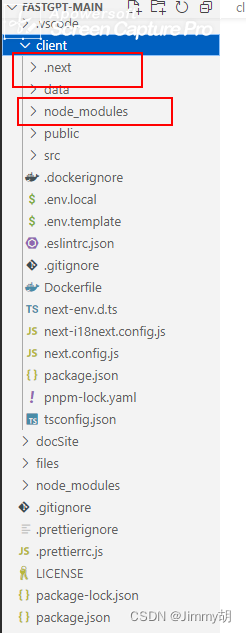
fastgpt构建镜像
1.把client目录复制到服务器 .next和node_modules文件夹不用上传到服务器 在服务器目录运行 docker build -t fastgpt:1.0.3 . 构建服务 再运行 docker ps 就可以看到容器了...

Git笔记--分支常用命令
目录 1--git branch -v 2--git branch 3--git checkout 4--git merge 1--git branch -v git branch -v git branch -v 用于查看分支版本; 2--git branch git branch xxxxx # xxxxx表示分支名 git branch 用于创建分支; 3--git checkout git check…...

常见设计模式学习+面试总结
一 设计模式简介 二 面试总结 1 什么是单例模式?都有哪些地方用到单例? 内存中只会创建且仅创建一次对象的设计模式,保证一个类只有一个实例,并且提供一个访问该全局访问点。 应用场景: 网站的计数器,一般…...

sql解决取多个截至每个月的数据
问题:需要查询1月、1-2月、1-3月… 1-12月,分区间的累计数据,在同一个sql语句里面实现。 多个分开查询效率不高,并且数据手动合并麻烦。 with t1 as ( SELECT *,CASE WHEN insutype 390 THEN 居民 ELSE 职工 END 人员类别,SUBST…...
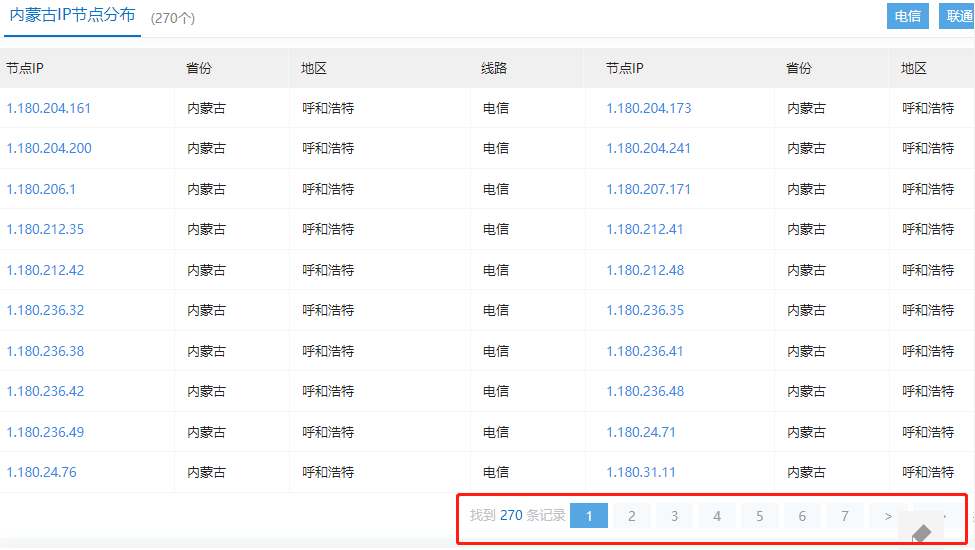
数据采集:selenium 获取 CDN 厂家各省市节点 IP
写在前面 工作需要遇到,简单整理理解不足小伙伴帮忙指正 对每个人而言,真正的职责只有一个:找到自我。然后在心中坚守其一生,全心全意,永不停息。所有其它的路都是不完整的,是人的逃避方式,是对…...
【el-tree】树形组件图标的自定义
饿了么树形组件的图标自定义 默认样式: 可以看到el-tree组件左侧自带展开与收起图标,咱们可以把它隐藏:: .groupList {::v-deep .el-tree-node { .el-icon-caret-right {display: none;} } } 我的全部代码 <div class"groupList"><el…...
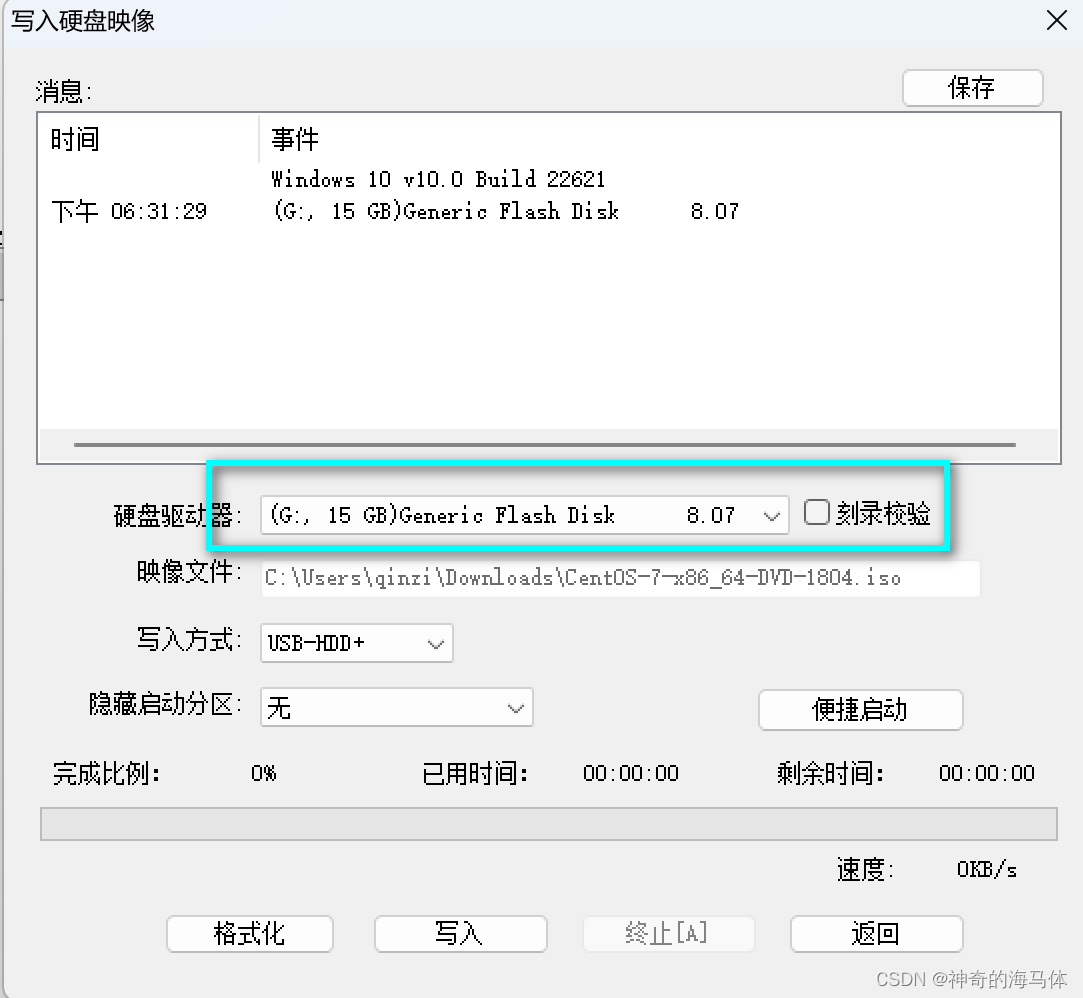
UltralSO软碟通制作Linux系统盘
第一步: 下载镜像 阿里云下载地址:https://mirrors.aliyun.com/centos-vault/ 按照需求选择系统版本,我这要求安装CentOS7.5的系统,我以CentOS7.5为例 第二步: 下载UltralSO软件 官网下载地址:https://cn.…...

深度解构:指纹浏览器底层隔离与Python高并发RPA,如何重塑电商矩阵自动化架构?
大家好,我是林焱,一名专注电商底层业务逻辑与 RPA 自动化架构定制的独立开发者。 在 CSDN 的各个技术板块中,关于爬虫与反爬虫、并发调度、以及客户端架构的讨论一直是热点。而将这些技术综合应用到极致的领域之一,就是当下极度内…...

Wireshark解密不止于IPSec:一份TLS/SSL、HTTPS、SSH等常见加密协议的解密指南
Wireshark解密不止于IPSec:一份TLS/SSL、HTTPS、SSH等常见加密协议的解密指南 当你面对一个加密的网络流量时,是否曾感到无从下手?无论是调试HTTPS API调用、分析SSH连接问题,还是研究QUIC协议的行为,加密流量总是像一…...

ComfyUI-VideoHelperSuite VHS_VideoCombine节点缺失问题深度分析与解决方案
ComfyUI-VideoHelperSuite VHS_VideoCombine节点缺失问题深度分析与解决方案 【免费下载链接】ComfyUI-VideoHelperSuite Nodes related to video workflows 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-VideoHelperSuite 技术问题深度分析 问题现象与影响范…...

地表温度反演进阶:对比单窗算法与大气校正法,用ENVI/ERDAS分析Landsat 7 ETM+数据哪个更准?
地表温度反演技术深度对比:单窗算法与大气校正法的实战解析 遥感技术在地表温度反演领域的应用已经发展出多种成熟算法,其中单窗算法和大气校正法(RTE)是最为常用的两种方法。对于中高级遥感用户而言,理解这两种算法的…...

Prompt工程实战:从CRISPE框架到垂直应用,解锁AI模型高效协作
1. 项目概述与核心价值 如果你正在寻找一套能真正“榨干”ChatGPT、Midjourney、Stable Diffusion等主流AI模型潜力的中文提示词(Prompt)集合,那么你找对地方了。 langgptai/wonderful-prompts 这个开源项目,正是由《ChatGPT中文…...

大语言模型越狱攻防全景:从对抗攻击到安全防御实践
1. 项目概述与核心价值如果你正在研究或部署大语言模型,那么“越狱”这个词你一定不陌生。它指的是通过各种技术手段,诱导或迫使一个经过安全对齐的模型,输出其原本被禁止生成的内容,比如有害信息、隐私数据或违反其使用政策的回答…...

Easydict:基于Raycast的智能翻译与查词插件,提升开发效率
1. 项目概述:一个为效率而生的翻译与查词工具如果你和我一样,是个常年和外语资料打交道的程序员、学生或研究者,那么“查词”和“翻译”这两件事,大概率是你工作流里最频繁、也最容易被中断的环节。传统的操作路径是什么ÿ…...
首次公开)
为什么顶尖SRE团队已停用Ctrl+F搜索Stack Overflow?Perplexity智能查询协议(P-SOQ v2.1)首次公开
更多请点击: https://intelliparadigm.com 第一章:为什么顶尖SRE团队已停用CtrlF搜索Stack Overflow?Perplexity智能查询协议(P-SOQ v2.1)首次公开 搜索范式的根本性迁移 传统 SRE 工作流中,工程师依赖关…...

从仿真到PCB:基于74LS系列芯片的十字路口交通灯系统实战设计
1. 项目背景与设计目标 十字路口交通灯控制系统是数字电路课程的经典实践项目。记得我第一次接触这个课题时,既兴奋又忐忑——兴奋的是终于能把课本上的与非门、触发器应用到真实场景,忐忑的是从仿真到实物可能存在的各种"坑"。这个基于74LS系…...

告别网络盲区:用RTL8811CU让旧笔记本变身Linux双频WiFi网卡/AP二合一网关
旧硬件新生:用RTL8811CU打造Linux双频无线网关实战指南 每次升级笔记本后,那些陪伴我们多年的旧设备往往被束之高阁。作为一名网络技术爱好者,我发现这些"退役"笔记本其实蕴藏着巨大的再利用价值——特别是当它们遇到RTL8811CU这样…...