【论文笔记】Planning and Decision-Making for Autonomous Vehicles
文章目录
- Summary
- 1. INTRODUCTION
- 2. MOTION PLANNING AND CONTROL
- 2.1. Vehicle Dynamics and Control
- 2.2. Parallel Autonomy
- 2.3. Motion Planning for Autonomous Vehicles
- 3. INTEGRATED PERCEPTION AND PLANNING
- 3.1. From Classical Perception to Current Challenges in Neural Network–Based Perception Systems
- 3.2. End-to-End Planning
- 4. BEHAVIOR-AWARE MOTION PLANNING
- 4.1. Cooperation and Interaction
- 4.2. Game-Theoretic Approaches
- 4.3. Probabilistic Approaches
- 4.4. Partially Observable Markov Decision Processes
- 4.5. Learning-Based Approaches
- 5. VERIFICATION AND SYNTHESIS
- 6. FLEET MANAGEMENT
- 7. CONCLUSION
这是一篇MIT18年发布在《Annual Review of Control, Robotics, and Autonomous Systems》的文章。本着学习的精神对这篇文章进行阅读并记录相关笔记,可能会有纰漏,还请批评斧正。
Summary
本文主要讨论了自主驾驶车辆领域中规划和决策的最新趋势和挑战。涵盖了三种不同的方法:传统PipeLine式的规划、行为意识决策规划和端到端规划,并强调了智能感知和规划的整合以及基于机器学习的方法。同时,也讨论了验证和安全性方面的问题以及自主驾驶车队管理方面的挑战。
1. INTRODUCTION
人们在日常出行上需要花费大量的时间,同时交通事故也造成了人员的伤亡。然而,自动驾驶汽车极有潜力能够解决这些问题,自动驾驶汽车能够极大地方便人们的生活,提高生产力与效率,保证交通系统的安全性,但自动驾驶汽车的实现需要从车辆设计到控制、感知、规划、协调和人际互动等等方面的进步……
作者在这篇文章中主要关注以下问题:
- 车辆如何决定下一步去哪里;
- 车辆如何使用传感器提供的数据来做出短期和长期的决策;
- 与其他车辆的交互对决策规划系统的影响;
- 车辆如何从自身历史信息和人类驾驶信息中学习驾驶;
- 如何确保车辆控制和规划系统的正确性和安全性;
- 如何进行道路上的多车协同管理,以最有效的方式将人员和物资运送到目的地。
实现完全的自动驾驶还需面临技术、法律、社会等方面的挑战。作者介绍了DARPA挑战赛使得自动驾驶汽车能够在十分接近真实场景的环境中工作,但也指出无论是DARPA中的方案,还是现有(-2018)比较先进的方案,都只能在环境相对简单、低速的状况下进行。
自动驾驶汽车需要对复杂的、不可预测的动态环境进行及时的推理,即使在复杂的城市道路环境中,也需要达到人类驾驶员水平的安全性、可靠性。
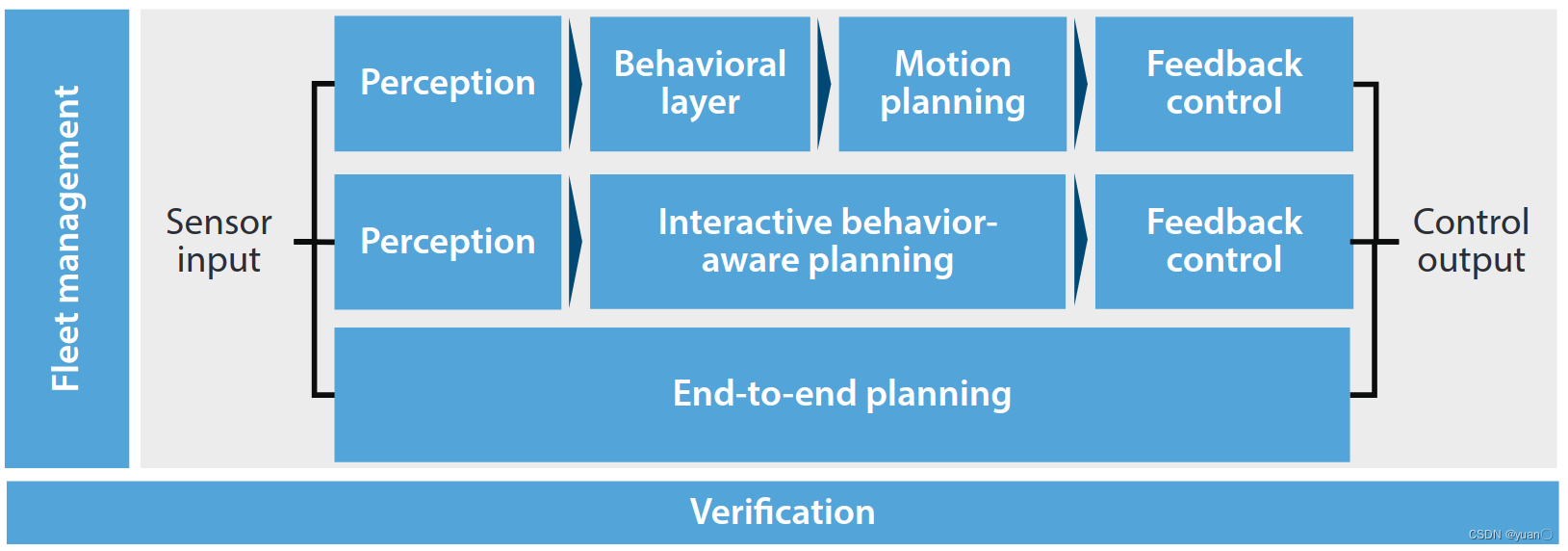
作者将现阶段的决策规划方法分为三种类型:
- sequential planning(传统的PipeLine式的planning)【第二章】
- end-to-end planning(端到端)【第三章】
- behavior-aware planning(行为意识决策规划)【第四章】
【第五章】主要是一些验证方法;【第六章】则是自动驾驶车辆编队运行的一些方法;【第七章】总结与展望。
2. MOTION PLANNING AND CONTROL
回顾一些传统的Control和Motion Planning的一些方法;还有parallel autonomy (人机共驾?);回顾现存决策规划的一些挑战。
2.1. Vehicle Dynamics and Control
对于一些低速的场景,使用运动学模型就足够,涉及到的控制方法有:PID、反馈线性化、MPC等等
对于高速或者驾驶行为比较激烈的场景,需要动力学模型的介入,涉及的方法有:非线性控制、MPC、反馈前馈控制。
作者还指出,不同的控制方法依赖于不同的车辆模型,并介绍了一些车辆模型识别的相关技术。这部分暂时还未接触过,不同的车辆应该有不同的高自由度模型以应对控制开发、仿真等需求。
2.2. Parallel Autonomy
作者首先介绍了常见自动驾驶控制系统的三种模式:
- series autonomy:由人类驾驶员发布指令给车辆进行具体执行。
- interleaved autonomy:人类驾驶员和控制系统交替控制。
- parallel autonomy:我理解为人机共驾,驾驶员和控制系统并行决策,提升在遇到危险时的安全性。parallel autonomy也是作者在这一节中主要介绍的。
作者指出,一种比较直观的方式合并驾驶员的输入以及控制系统的输出是将二者进行线性组合;另一种则是基于优化的方式,将驾驶员意图和系统目标的偏差最小化。基于优化的方式有一种典型的策略能够将优化问题简化——给定车辆速度 V V V,只对转向角进行优化。
2.3. Motion Planning for Autonomous Vehicles
作者先推荐了两篇运动控制方向的经典文章:
[1] Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions
[2] A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles
作者给出传统Motion Planning的三种解决方案:
- 输入空间离散化+碰撞检测,比较经典的就是Lattice Planner和road-aligned primitives,比较适用于高速场景,这种方式简洁高效?(对计算量应该有不小要求)。空间离散化一般可以对状态空间或者控制空间进行操作。
- 随机采样类的算法。例如RRT,PRM等等。算法计算量不小,非最优的。
- 基于约束优化和滚动优化的方法,多应用于路径跟踪控制。考虑了车辆模型(动力学/运动学),轨迹通常比较平滑。这类方法需要考虑如何将问题转化为凸空间问题进行求解。
自动驾驶车辆还需要考虑到交通规则的约束问题,在一些情况(例如,超过非法停放的车辆)下,还需对一些规则作出违反。对此,可以将交通规则作为cost function,也可以将其作为逻辑函数。Minimum-violation routing这个问题还需面临环境、车辆模型等等诸多不确定的因素,单纯的基于规则的方法可能难以覆盖全部的场景。
作者提到的一些方法需要对交通参与者行为轨迹进行预测,但作者也指出,复杂场景以及交通参与者之间交互所产生的影响也是目前研究的一个方向与挑战。
3. INTEGRATED PERCEPTION AND PLANNING
3.1. From Classical Perception to Current Challenges in Neural Network–Based Perception Systems
感知的概述,我不是这个方向的,暂时不做深入理解。
3.2. End-to-End Planning
传统的Framework,各模块是相互解耦的,通过接口进行连接。作者在这里提到一种通过训练感知模块的部分功能去整合规划模块的任务。比如用弱监督学习的方式利用历史驾驶数据集进行轨迹预测与输出;用语义分割的方式生成路径……
更进一步的端到端,也可以称为行为映射法(behavior reflex approach),在1989年就有人用神经网络开始做了(ALVINN, Autonomous Land Vehicle in a Neural Network)。随着GPU算力的快速增长,网络层数不断加深,参数不断增多,end-to-end的效果也慢慢显露出来。NVIDIA在2006的工作中,通过建立原始前视摄像头与转向控制命令之间的映射关系,同时通过图像旋转、移动等等操作以及增加纠正样本的方法,能够使车辆适应一些更为复杂的场景。接着,作者介绍了一些关于通过观察输入图像的哪些区域对网络的输出贡献最大的研究(比如车道内的位置和方向)。
对于端到端规划到什么程度,有研究规划到决策层(直行、转向等等),也有规划到控制层(执行层,方向盘转角等等)。比如Xu et al利用LSTM去做的通过视频直接分别去学离散的决策和连续的控制的工作。
作者还介绍了DAgger,不仅仅是监督学习,强化学习等领域也是端到端应用的重点。下面是AI对DAgger (Dataset Aggregation)的介绍。
DAgger (Dataset Aggregation)是一种迭代式的强化学习方法,用于解决模型在测试时可能遇到的分布偏移问题。在DAgger中,首先通过人工指导或其他方法训练一个初始的模型,并用该模型对环境进行交互(比如在游戏中进行游戏),并收集一批“专家演示数据”。然后,使用这些数据重新训练模型,并用新模型再次与环境交互,生成新一批数据。这个过程可以重复多次,直到模型的性能足够好以满足需求。
DAgger的主要思想是将专家模型的知识与网络自己的探索相结合,以便让网络自己学习如何在新场景中进行操作。由于新模型的行动可能与专家演示数据不同,因此每次重新训练的数据集都在专家演示数据上添加了网络行为,这样新数据集就会更加接近真实场景,从而提高模型的性能。
DAgger是一种强化学习领域中效果比较好的方法,已被广泛应用于机器人控制、自动驾驶、游戏智能等领域。
机器人移动路径规划中也有经常运用端到端。机器人在需要能够现实世界中能够解决突发的各类问题以及适应未知环境,但像ensemble, bootstrap, 和Monte Carlo dropout等等用于量化神经网络不确定性的方法对于未知环境可能无法提供准确的不确定度的估计。遇到这情况时,可以将E2E的方法退回到传统的方法之中。
强化学习需要用到仿真环境,最后作者介绍了一些关于基于仿真环境训练强化学习的一些策略。
4. BEHAVIOR-AWARE MOTION PLANNING
第二章的大部分方法需要对其他交通参与者未来的行为进行预测,然而当环境拥挤时,预测每一个动态物体的运动是不现实的。
DARPA城市赛中有不少关于tactical planning(战术层规划)的方案,比如状态机、决策树等等,但这些rule-based的方案难以估计未知的、复杂变化的场景。
作者写到自动驾驶汽车和交通参与者之间能够进行交互、互相推断各自意图,基于所见进行推断但不需要明确的通信。这和V2X或者车路协同等等方式有些不太一致,没有明确的信息,可能会产生更大的不确定性,会威胁到整个交通系统的安全。
4.1. Cooperation and Interaction
多智能体之间的交互是十分重要的。一个智能体依赖于其他智能体作出决策,在遇到环境复杂、不确定的情况下,很可能会产生“不确定爆炸(exploding uncertainty)”和“机器人冻结问题”(freezing-robot problem,简单理解就是机器人面对过多的选择而无法进行决策)。对此,有以下三种主要的解决方案:
- 更好的环境建模以及对未来预期的建模。但依然会存在Freezing-robot Problem。
- 相当于假设所有其他机器人都是可控的:这会让策略非常激进,同时会带来潜在的风险。
- 基于联合分布的方式:包括联合概率分布和联合代价(cost)分布。
下面是一篇关于协作式规划(cooperative planning)的综述,cooperative planning不考虑与其他车辆、基础设施通信的问题,即不考虑V2X。
Ulbrich S, Grossjohann S, Appelt C, Homeier K, Rieken J, Maurer M. 2015. Structuring cooperative behavior planning implementations for automated driving. In 2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), pp. 2159–65. New York: IEEE
4.2. Game-Theoretic Approaches
博弈论有一个前提:假设所有的agent都会以采取最优的策略进行决策。这类方法可以用类似于基于概率的方式去计算,比如最大似然估计和最大后验估计。
博弈论的方法和上一种方法的区别在于并非基于联合代价或分布进行的:在双方博弈中,自车首先计算一个动作,然后模拟其他车辆以最大化自身预期奖励,其结果可能是高度交互的而不是被动反应的。
但随着agent数量的增多,会使得博弈问题呈指数级增长。一种简答的解决方法是将动作空间进行离散化,然后去搜索所有的可能。比如采用决策树的方式,但决策树也会随着agent的增多,指数级增长。为了更快实现最优或近似最优,有采用Monte Carlo tree search的方式;为了减少计算复杂度,有只让车辆受到前车的影响,从而将问题的复杂简化到agent数量的二次方。
也有采用Stackelberg game的方法,考虑最坏的情况,从而使每个agent不完全依赖于其他所有agent。这种方式复杂度较低,与agent呈线性关系,但决策速度较慢,决策较为保守。
4.3. Probabilistic Approaches
这一节主要讲了概率方法在自动驾驶领域中的应用。其中提到了一些具体的方法,比如Wei等人基于高速公路并道场景,使用MDP(Markov decision process)作为决策方法,搜索出可能的策略集,再依据cost fuction,选出最优的策略;还有使用离散流形来进行轨迹采样,智能驾驶模型来描述车流中单个车辆的纵向位置和速度的动力学,以及使用粒子滤波器来估计行为参数等。此外,还介绍了如何使用概率图模型来描述观测数据之间的依赖关系。这些方法的目标是提高自动驾驶车辆在复杂交通环境中的决策能力和安全性。
4.4. Partially Observable Markov Decision Processes
这一节介绍了部分可观察马尔可夫决策过程(Partially Observable Markov Decision Processes,POMDP)的概念和应用。在概率情况下,这个问题通常被建模为一个部分可观察的马尔可夫决策过程,其中其他代理的意图和重新规划程序并不是直接可观察的。POMDP通常离线进行,不仅仅计算当前状态的最优策略,而是计算每一个可能观测状态的最优策略。
POMDP问题是PSPACE完备的,也就意味着POMDP问题的解决需要花上大量的计算时间,这与决策模块所要求的100ms是冲突的。有些研究通过在预先规划的路径上规划所有车辆的运动,降低了给定问题的状态空间维数,简化问题。
PSPACE是计算机科学中的一个概念,代表着一类计算问题的复杂度。具体来说,PSPACE表示能够在多项式空间复杂度内解决的问题,即问题的解决所需的计算空间与问题规模的多项式成正比。这类问题通常涉及到对大量状态或组合的搜索和存储,如棋类游戏的解法、自动机的行为分析等。PSPACE问题的解决通常需要使用高级算法和数据结构。
有些研究在POMDP中整合了其他车辆的意图以及道路信息。POMDP也可不考虑交通参与者之间的交互,只考虑自车能达到的状态。作者还指出规划的视野一般小于10s,在高速公路或者城市道路场景中,实际所需的驾驶动作还是相对不多的,所以规划只需要达到一定精度就行,不用达到最优的状态。同时在抽象的轨迹上进行规划而不是具体的轨迹上进行规划,能够显著降低复杂度。
为POMDP找到合适的符号表示是困难的,因为它在很大程度上取决于具体的任务和情况。通常的方法是使用连续空间的等距离散化。一方面,这样的离散化通常过于粗糙,不能代表足够的细节来找到问题的解决方案。另一方面,它对不需要高精度的信息进行冗余编码。
4.5. Learning-Based Approaches
主要介绍了基于数据驱动的学习方法,该方法被应用于自动驾驶中的行为感知和运动规划。这些方法通常会将决策和规划分离开来,通过使用监督学习方法,如支持向量机、高斯混合模型(Gaussian mixture models)和人工神经网络,来训练模型。此外,反向强化学习技术(IRL)也被广泛用于学习专家驾驶员的决策和行为模式,并用于生成自动驾驶的决策和规划。最后,该节还介绍了一些新兴的学习方法,例如最大熵深度逆强化学习和对抗生成式模型学习,这些方法可以直接从原始输入数据中学习自动驾驶的行为模式。
5. VERIFICATION AND SYNTHESIS
暂略
6. FLEET MANAGEMENT
暂略
7. CONCLUSION
- 数据驱动的方式还是需要进一步的创新。
- 要保证自动驾驶汽车(算法)的可验证性、安全性和可解释性。
- 提升各类算法的泛化能力,以使自动驾驶汽车能够适应各类场景。
展望
- 复杂环境下的安全性、系统兼容性以及交互性
- 不确定环境下保证安全性能
- 极端场景下的适应能力
- 继续探索基于学习的方法
- 算法需要验证与评估
- 需要开发具有随机路线、在线性能和有限服务质量的大规模车队管理方法。
相关文章:
【论文笔记】Planning and Decision-Making for Autonomous Vehicles
文章目录 Summary1. INTRODUCTION2. MOTION PLANNING AND CONTROL2.1. Vehicle Dynamics and Control2.2. Parallel Autonomy2.3. Motion Planning for Autonomous Vehicles 3. INTEGRATED PERCEPTION AND PLANNING3.1. From Classical Perception to Current Challenges in Ne…...
视频云存储/安防监控EasyCVR视频汇聚平台接入GB国标设备时,无法显示通道信息该如何解决?
安防视频监控/视频集中存储/云存储/磁盘阵列EasyCVR平台可拓展性强、视频能力灵活、部署轻快,可支持的主流标准协议有国标GB28181、RTSP/Onvif、RTMP等,以及支持厂家私有协议与SDK接入,包括海康Ehome、海大宇等设备的SDK等。平台既具备传统安…...

git中,add到暂存区,commit且push之后,暂存区域里还有内容吗
在Git中,使用git add命令将更改添加到暂存区后,提交这些更改并将其推送(push)到远程仓库后,暂存区中的内容会被清空。 具体的流程如下: 使用git add命令将更改添加到暂存区。这样,暂存区将保存…...

java中用SXSSFWorkbook把多个字段的list数据和单个实体dto导出到excel如何导出到多个sheet页详细实例?
要使用SXSSFWorkbook将多个字段的List数据和单个实体DTO导出到多个Sheet页,你可以按照以下步骤进行操作: 创建一个SXSSFWorkbook对象作为工作簿。针对每个字段的List数据,创建一个新的Sheet页,并将数据写入该Sheet页。创建一个新…...
ES基础操作
1.创建索引 在 Postman 中,向 ES 服务器发 PUT 请求 : http://127.0.0.1:9200/shopping 后台日志 重复发送 PUT 请求添加索引 : http://127.0.0.1:9200/shopping ,会返回错误信息 : 2.获取单个索引相关信息 在 Postman 中&#…...

PCIE超高速实时运动控制卡在六面外观视觉检测上的应用
市场应用背景 XPCIE1028超高速实时运动控制卡在六面外观检测高速视觉筛选中的应用,结合正运动技术提供的专用筛选机调试软件,可实现15000pcs/分钟的IO触发检测速度,只需简单参数设置,搭配图像采集硬件和视觉处理软件,…...
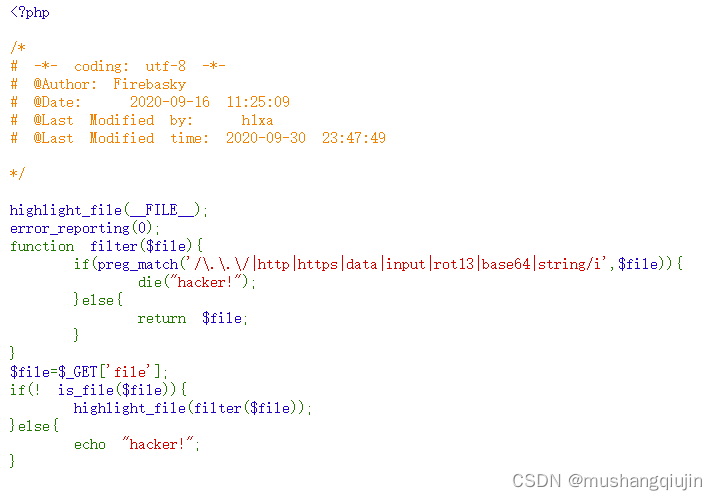
ctfshow web入门 php特性 web108-web112
1.web108 strrev() 反转字符串 <?php echo strrev("Hello world!"); // 输出 "!dlrow olleH" ?> ereg 存在空字符截断(只会匹配%00前面的字符),这个函数匹配到为true,没有匹配到为false,877为0x36d的十进制数值 payload: …...

数据可视化是什么?有什么工具?
一、什么是数据可视化? 数据可视化是一种通过图表、图形、地图和其他视觉元素将数据呈现给用户的方式。它是将复杂的数据转化为易于理解和解释的视觉形式的过程。数据可视化旨在帮助用户发现数据中的模式、趋势和关联,并从中获得洞察力。 数据可视化的…...
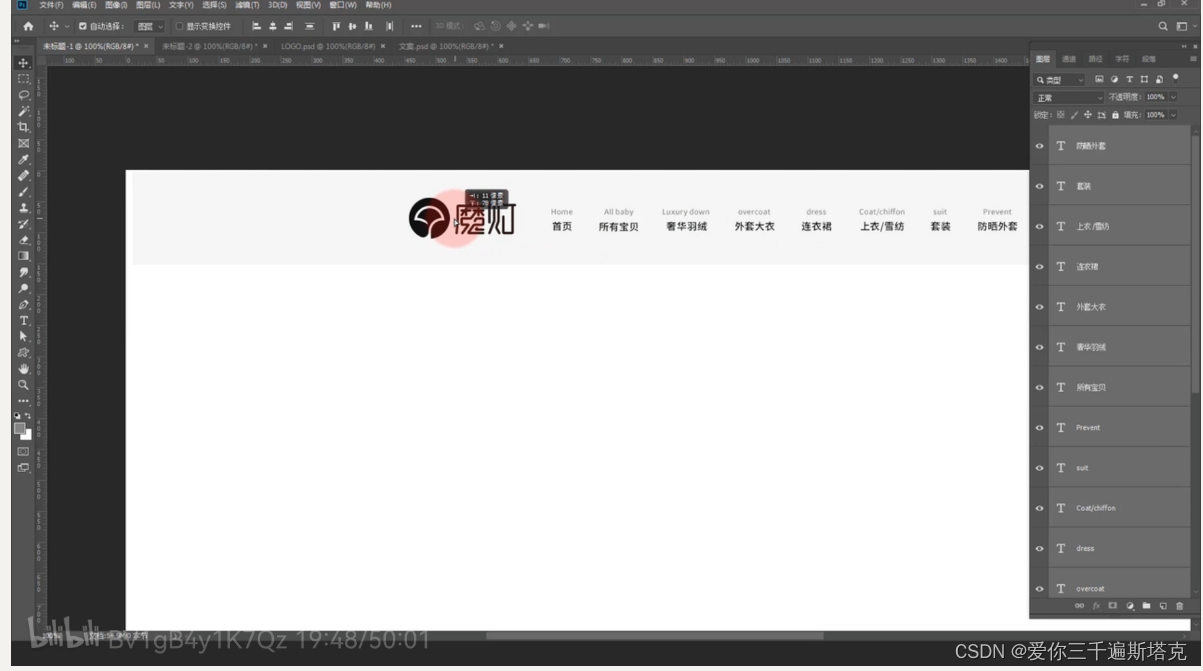
PC端版面设计之尾部设计
1、莫拉王子,底部就放了一个返回顶部 2 麻辣王子就放了一个认证--放了产地和得到的奖 3 阿芙:就是精油 4阿芙放的是品牌故事 5 这里可以做微博粉丝群体 6 基本返回底部是一个标配,点一下就可以反悔了 7 加一下旺旺店铺 8 BetyBoop的底部 9 底部 10 返回底…...
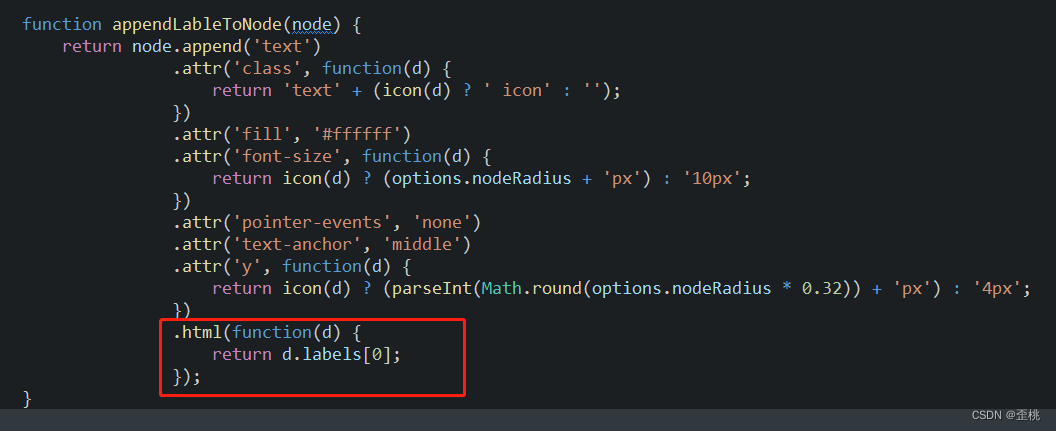
neo4jd3拓扑节点显示为节点标签(自定义节点显示)
需求描述:如下图所示,我的拓扑图中有需要不同类型的标签节点,我希望每个节点中显示的是节点的标签 在官方示例中,我们可以看到,节点里面是可以显示图标的,现在我们想将下面的图标换成我们自定义的内容 那…...
网络安全(黑客)了解学习路线
谈起黑客,可能各位都会想到:盗号,其实不尽然;黑客是一群喜爱研究技术的群体,在黑客圈中,一般分为三大圈:娱乐圈 技术圈 职业圈。 娱乐圈:主要是初中生和高中生较多,玩网恋…...
【CSS】CSS 特性 ( CSS 优先级 | 优先级引入 | 选择器基本权重 )
一、CSS 优先级 1、优先级引入 定义 CSS 样式时 , 可能出现 多个 类型相同的 规则 定义在 同一个元素上 , 如果 CSS 选择器 相同 , 执行 CSS 层叠性 , 根据 就近原则 选择执行的样式 , 如 : 出现两个 div 标签选择器 , 都设置 color 文本颜色 ; <style>div {color: re…...

Linux Shell 搜索命令 grep
grep 是一个强大的文本搜索工具,用于在文件或标准输入中查找匹配指定模式的行。 它的基本语法是: grep [options] pattern [file...]其中,pattern 是要搜索的模式,可以是普通字符串或使用正则表达式表示的模式。file 是要被搜索…...
【C进阶】指针(一)
大家好,我是深鱼~ 【前言】: 指针的主题,在初阶指针章节已经接触过了,我们知道了指针的概念: 1.指针就是个变量,用来存放地址,地址的唯一标识一块内存空间(指针变量)&a…...
bug复刻,解决方案---在改变div层级关系时,导致传参失败
问题描述: 在优化页面时,为了实现网页顶部遮挡效果(内容滚动,顶部导航栏不随着一起滚动,并且覆盖),做法是将内容都放在一个div里面,为这个新的div设置样式,margin-top w…...
)
2023年Java核心技术面试第九篇(篇篇万字精讲)
目录 十七 . 并发相关基础概念 17.1 线程安全 17.2 保证线程安全的两个方法 17.2.1 封装 17.2.2 不可变 17.2.2.1 final 和 immutable解释 17.3 线程安全的基本特性 17.3.1 原子性(Atomicity) 17.3.2 可见性(Visibility) 17.3.3 有…...

解码Python JSON:从基础到高级,掌握使用的精髓
摘要: JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,在Python中通过json模块可以方便地处理JSON数据。本文将从JSON的基础概念讲解开始,逐步深入介绍json模块的各种功能和用法,带您从入门到…...

Qt --- 自定义工具类 持续更新... ...
QSettings使用 .h文件 #ifndef UTIL_H #define UTIL_H#include <QSettings>class Util {public:// 配置文件读写 {{static bool writeInit(QString path, QString user_key, QString user_value);static bool readInit(QString path, QString user_key, QString &u…...

GO语言圣经 第二章习题
练习2.1 向tempconv包添加类型、常量和函数用来处理Kelvin绝对温度的转换,Kelvin 绝对零度是−273.15C,Kelvin绝对温度1K和摄氏度1C的单位间隔是一样的。 conv.go package tempconv// CToF converts a Celsius temperature to Fahrenheit. func CToF(c …...

Java 语言实现线性查找算法
【引言】 线性查找算法是一种简单且直观的查找算法。它从数组的第一个元素开始逐个比较,直到找到目标元素,或者遍历完整个数组。本文将使用Java语言实现线性查找算法,并详细讲解其思想和代码实现。 【算法思想】 线性查找的核心思想是逐个比…...

CANN-昇腾NPU梯度累积-显存不够时怎么模拟大batch训练
大模型训练的最佳 batch size 通常在 1M-4M tokens。8 卡 Atlas 800I A2 的总显存 512GB,batch size 能开到 50 万 tokens 左右——不够。梯度累积让你用小 batch 跑多次前向,累积梯度后一次性更新,等效于大 batch 训练。 梯度累积的原理 标准…...

【AI Agent医疗落地实战指南】:20年三甲医院IT总监亲授5大不可绕过的合规雷区与3步部署法
更多请点击: https://intelliparadigm.com 第一章:AI Agent医疗落地的战略价值与时代必然性 当全球医疗系统持续面临医生资源紧张、基层诊疗能力不均、慢性病管理低效与患者依从性不足等结构性挑战时,AI Agent已不再仅是技术演进的选项&…...

Unity启动Logo跳过指南:三步实现多平台秒开启动
1. 为什么Unity启动Logo不是“装饰”,而是必须被正视的交付环节你刚打包完一个Unity游戏,兴冲冲地发给测试同事,对方点开exe——先是一片黑屏,接着弹出那个熟悉的、带渐变动画的Unity Logo,再过3秒才进主菜单。测试发来…...

3步掌握暗黑2存档编辑:从游戏小白到修改高手的完整教程
3步掌握暗黑2存档编辑:从游戏小白到修改高手的完整教程 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor 你是否曾在暗黑破坏神2中花费数百小时刷装备却一无所获?是否因为角色build配置不当而不得不重新练级…...

手写LoRA:从矩阵低秩分解到PyTorch参数化实现
1. 项目概述:为什么今天你必须真正搞懂 LoRA,而不是只看个热闹我带过三届校招算法工程师,也帮五家中小企业的技术团队落地过大模型应用。每次聊到模型微调,总有人一上来就问:“老师,我这台3090能不能跑Llam…...

Postman接口测试实战:48小时掌握状态码、JSON与断言
1. 这不是又一篇“点点点就完事”的接口测试入门“接口测试小白入门”——光是看到这七个字,我手边的咖啡杯就晃了三下。过去三年,我带过27个刚转行进测试岗的新人,其中21个在入职第一周就卡在“Postman怎么发请求”这一步;还有4个…...

生成式AI初学者本地部署实操指南:从报错诊断到模型运行
1. 这不是又一篇“AI科普文”,而是一份写给真实初学者的实操手记Generative AI: A Beginner’s Viewpoint Part 2——这个标题乍看像课程续集,但如果你正站在ChatGPT第一次弹出对话框的那一刻、刚下载完Stable Diffusion却卡在WebUI启动界面、或对着Jupy…...

茉莉花插件:5分钟掌握Zotero中文文献管理终极方案
茉莉花插件:5分钟掌握Zotero中文文献管理终极方案 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum 还在为中文文献管理…...

如何高效使用B站视频下载工具:DownKyi专业用户的全面技巧指南
如何高效使用B站视频下载工具:DownKyi专业用户的全面技巧指南 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等…...

3分钟部署OpenClaw最新版v2026.4.26指南,可视化小白可用操作简单
装OpenClaw这件事,说难不难,但真要踩到坑里也挺耽误时间的。今天把我踩过的几个坑整理出来,给大家省点排查时间。 下载地址:https://top.wokk.cn,有详细版本说明可以先看一下。 坑1:PowerShell执行策略拦路…...