13.4 目标检测锚框标注 非极大值抑制
锚框的形状计算公式
假设原图的高为H,宽为W
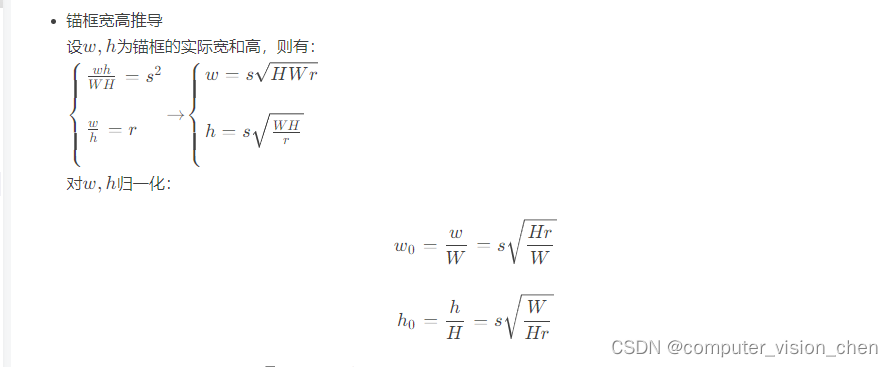
锚框形状详细公式推导

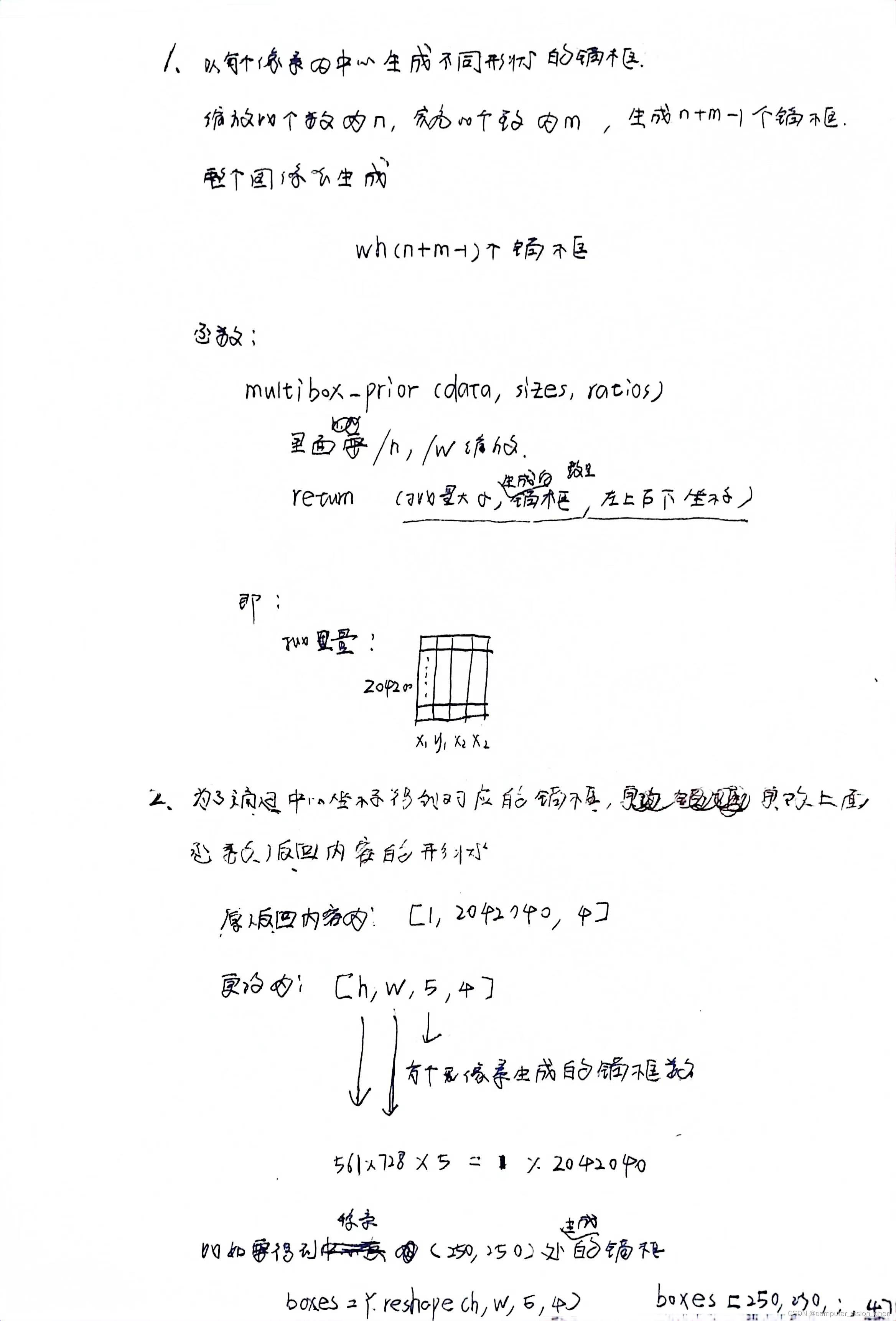
以每个像素为中心生成不同形状的锚框
# s是缩放比,ratio是宽高比
def multibox_prior(data, sizes, ratios):"""生成以每个像素为中心具有不同形状的锚框"""in_height,in_width = data.shape[-2:] # 取出最后两个元素,即h和wdevice,num_sizes,num_ratios = data.device,len(sizes),len(ratios)boxes_per_pixel = (num_sizes+num_ratios -1) # 以某个像素坐标为中心的锚框为n+m-1size_tensor = torch.tensor(sizes,device=device) # 将缩放比例列表sizes转为tensor, device参数指定设备ratio_tensor = torch.tensor(ratios,device=device)# 为了将锚点移动到像素的中心,需要设置偏移量。# 因为一个像素的高为1且宽为1,我们选择偏移我们的中心0.5offset_h, offset_w = 0.5, 0.5steps_h = 1.0 / in_height # 在y轴上缩放步⻓steps_w = 1.0 / in_width # 在x轴上缩放步⻓print(f'steps_h,steps_w = {steps_h,steps_w}')# 生成锚框的所有中心点center_h = (torch.arange(in_height, device=device) + offset_h) * steps_hcenter_w = (torch.arange(in_width, device=device) + offset_w) * steps_wprint(f'center_h,center_w={center_h,center_w}')#网格化中心点坐标shift_y,shift_x = torch.meshgrid(center_h,center_w)#reshape成一维,shift_y和shift_x坐标一一对应shift_y,shift_x = shift_y.reshape(-1),shift_x.reshape(-1)print(f'shift_y, shift_x={shift_y, shift_x}') ##norm=√(H/W),这个就是个标号,方便计算norm = torch.sqrt(torch.tensor(in_height)/torch.tensor(in_width))# 生成“boxes_per_pixel”个高和宽,#只考虑包含s1或r1的组合,因此S*r1 与s1*R合并即为n+m-1个锚框w = torch.cat((size_tensor * torch.sqrt(ratio_tensor[0]),size_tensor[0] * torch.sqrt(ratio_tensor[1:]))) * normh = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),size_tensor[0] / torch.sqrt(ratio_tensor[1:]))) / norm# 获得归一化后的锚框的w,h的一半,形成偏移量,为了让归一化后的锚框根据中心点 + 偏移量找到 左上角和右下角坐标anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(in_height * in_width, 1) / 2# 每个中心点都将有“boxes_per_pixel”个锚框,# 所以生成含所有锚框中心的网格,重复了“boxes_per_pixel”次out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],dim=1).repeat_interleave(boxes_per_pixel, dim=0)# 每个中心点都将有“boxes_per_pixel”个锚框,# 所以生成含所有锚框中心的网格,重复了“boxes_per_pixel”次out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],dim=1).repeat_interleave(boxes_per_pixel, dim=0)#(x_min,y_min,x_max,y_max) = 归一化后的锚框中心点 + 往左上角和右下角走的偏移量output = out_grid + anchor_manipulationsreturn output.unsqueeze(0)
# 将锚框变量Y的形状更改为(图像高度,图像宽度,以同一像素为中心的锚框的数量,4)
boxes = Y.reshape(h, w, 5, 4)# 此处的5由 缩放的数量n + 宽高比的数量m -1 而得
# 访问以(250,250)为中心的第一个锚框。它有四个元素:锚框左上⻆的(x, y)轴坐标和右下⻆的(x, y)轴坐标
boxes[250, 250, 0, :] # 输出的坐标是归一化后的,即归一化前的锚框 w/in_weight 和 h/in_height
img = d2l.plt.imread('../data/images/cat_and_dog.jpg')
h, w = img.shape[:2]
print(h, w)
X = torch.rand(size=(1, 3, h, w))
# 返回的锚框变量Y的形状是(批量大小,锚框的数量,4 (表示锚框的左上角右下角坐标))。
Y = multibox_prior(X, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5])
Y.shape
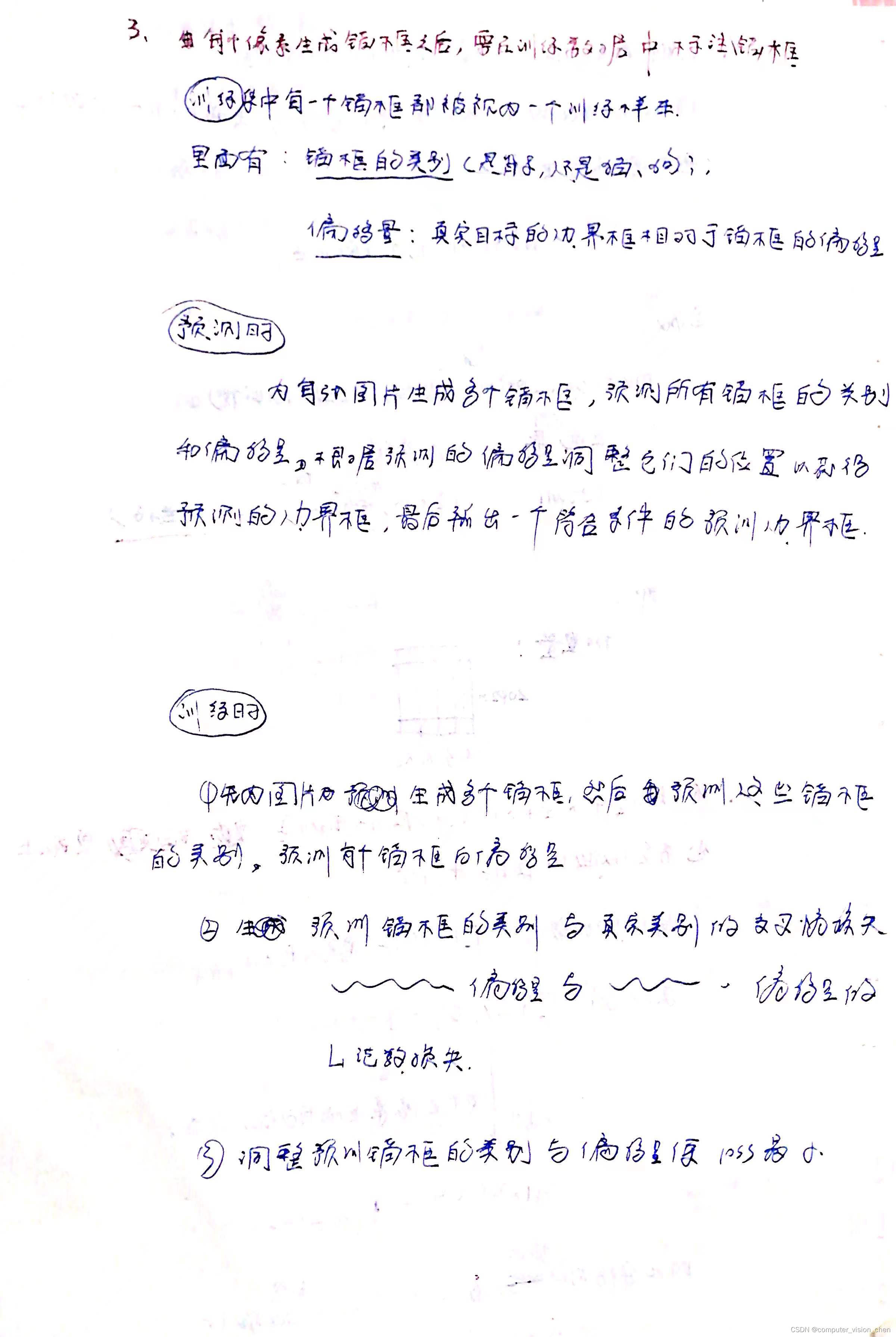
根据真实框来标注生成的锚框

# 计算IOU
def box_iou(boxes1,boxes2):''':param boxes1: shape = (boxes1的数量,4):param boxes2: shape = (boxes2的数量,4):param areas1: boxes1中每个框的面积 ,shape = (boxes1的数量):param areas2: boxes2中每个框的面积 ,shape = (boxes2的数量):return:'''# 定义一个Lambda函数,输入boxes,内容是计算得到框的面积box_area = lambda boxes:((boxes[:,2] - boxes[:,0]) * (boxes[:,3] - boxes[:,0]))# 计算面积areas1 = box_area(boxes1)areas2 = box_area(boxes2)# 计算交集 要把所有锚框的左上角坐标 与 真实框的所有左上角坐标 作比较,大的就是交集的左上角 ,加个None 可以让锚框与所有真实框作对比inter_upperlefts = torch.max(boxes1[:,None,:2],boxes2[:,:2])# 把所有锚框的右下角坐标 与 真实框的所有右下角坐标 作比较,小的就是交集的右下角坐标 ,加个None 可以让锚框与所有真实框作对比inter_lowerrights = torch.min(boxes1[:,None,2:],boxes2[:,2:])# 如果右下角-左上角有元素小于0,那就说明没有交集,clamp(min-0)会将每个元素与0比较,小于0的元素将会被替换成0inters = (inter_lowerrights - inter_upperlefts).clamp(min=0) # 得到w和hinter_areas = inters[:,:,0] * inters[:,:,1] # 每个样本的 w*h# 求锚框与真实框的并集# 将所有锚框与真实框相加,他们会多出来一个交集的面积,所以要减一个交集的面积union_areas = areas1[:,None] * areas2 - inter_areasreturn inter_areas/union_areas
# 每个真实框都要跟所有锚框计算iou,Iou数量等于,真实框数量 * 锚框的数量
def assign_anchor_to_bbox(ground_truth,anchors,devices,iou_threshold=0.5):# 得到锚框和真实框的个数num_anchors,num_gt_boxes = anchors.shape[0],ground_truth.shape[0]# jaccard是计算 所有锚框anchors和真实框ground_truth的交并比jaccard = box_iou(anchors,ground_truth)# torch.full(size,fill_value,dtype,device),如下代码生产成一个一位数组,长度为锚框的个数,值为-1anchors_bbox_map = torch.full((num_anchors,),-1,dtype=torch.long,device=devices)# 对行取最大值,得到每个真实框对应的最大IOU的锚框max_ious,indices = torch.max(jaccard,dim=1)# 返回张量中非0元素的索引,即Max_iou>设定的阈值,位于第i行和第j列的元素x_ij是锚框i和真实边界框j的IoUanc_i = torch.nonzero(max_ious>=iou_threshold).reshape(-1)box_j = indices[max_ious>=iou_threshold]anchors_bbox_map[anc_i] = box_jcol_discard = torch.full((num_anchors,), -1)row_discard = torch.full((num_gt_boxes,), -1)for _ in range(num_gt_boxes):max_idx = torch.argmax(jaccard)box_idx = (max_idx % num_gt_boxes).long()anc_idx = (max_idx / num_gt_boxes).long()anchors_bbox_map[anc_idx] = box_idxjaccard[:, box_idx] = col_discardjaccard[anc_idx, :] = row_discardreturn anchors_bbox_map
# 标注类别和偏移量
def offset_boxes(anchors, assigned_bb, eps=1e-6):"""对锚框偏移量的转换"""c_anc = d2l.box_corner_to_center(anchors)c_assigned_bb = d2l.box_corner_to_center(assigned_bb)offset_xy = 10 * (c_assigned_bb[:, :2] - c_anc[:, :2]) / c_anc[:, 2:]offset_wh = 5 * torch.log(eps + c_assigned_bb[:, 2:] / c_anc[:, 2:])offset = torch.cat([offset_xy, offset_wh], axis=1)return offset
'''如果一个锚框没有被分配真实边界框,将锚框的类别标记为背景。背景类别的锚框通常被称为负类锚框,其余的被称为正类锚框。我们使用真实边界框(labels参数)实现以下multibox_target函数,来标记锚框的类别和偏移量(anchors参数)。此函数将背景类别的索引设置为零,然后将新类别的整数索引递增一。
'''
def multibox_target(anchors, labels):"""使用真实边界框标记锚框"""batch_size, anchors = labels.shape[0], anchors.squeeze(0)batch_offset, batch_mask, batch_class_labels = [], [], []device, num_anchors = anchors.device, anchors.shape[0]for i in range(batch_size):label = labels[i, :, :]anchors_bbox_map = assign_anchor_to_bbox(label[:, 1:], anchors, device)bbox_mask = ((anchors_bbox_map >= 0).float().unsqueeze(-1)).repeat(1, 4)# 将类标签和分配的边界框坐标初始化为零class_labels = torch.zeros(num_anchors, dtype=torch.long,device=device)assigned_bb = torch.zeros((num_anchors, 4), dtype=torch.float32,device=device)# 使用真实边界框来标记锚框的类别。# 如果一个锚框没有被分配,标记其为背景(值为零)indices_true = torch.nonzero(anchors_bbox_map >= 0)bb_idx = anchors_bbox_map[indices_true]class_labels[indices_true] = label[bb_idx, 0].long() + 1assigned_bb[indices_true] = label[bb_idx, 1:]# 使用真实边界框来标记锚框的类别。# 如果一个锚框没有被分配,标记其为背景(值为零)indices_true = torch.nonzero(anchors_bbox_map >= 0)bb_idx = anchors_bbox_map[indices_true]class_labels[indices_true] = label[bb_idx, 0].long() + 1assigned_bb[indices_true] = label[bb_idx, 1:]# 偏移量转换offset = offset_boxes(anchors, assigned_bb) * bbox_maskbatch_offset.append(offset.reshape(-1))batch_mask.append(bbox_mask.reshape(-1))batch_class_labels.append(class_labels)bbox_offset = torch.stack(batch_offset)bbox_mask = torch.stack(batch_mask)class_labels = torch.stack(batch_class_labels)return (bbox_offset, bbox_mask, class_labels)
# 第一个元素表示类别,0代表狗,1代表猫。其余四个元素是左下角坐标和右上角坐标(归一化后的介于0-1之间),归一化的方法是,x坐标 / 宽,y坐标/高
ground_truth = torch.tensor([[0, 0.1, 0.08, 0.52, 0.92],[1, 0.55, 0.2, 0.9, 0.88]])
# 锚框
anchors = torch.tensor([[0, 0.1, 0.2, 0.3], [0.15, 0.2, 0.4, 0.4],[0.63, 0.05, 0.88, 0.98], [0.66, 0.45, 0.8, 0.8],[0.57, 0.3, 0.92, 0.9]])
bbox_scale = torch.tensor((w, h, w, h))
# img = d2l.plt.imread('../data/images/cat_dog.png')
img = d2l.plt.imread('../data/images/cat_and_dog.jpg')
fig = d2l.plt.imshow(img)
# 画出真实框 :(坐标轴,归一化*bbox_scale得到原图规模的坐标,标签,颜色)
show_bboxes(fig.axes,ground_truth[:,1:] * bbox_scale,['dog','cat'],'k') # k最后画出来是黑色
# 画出设置的锚框,把锚框类别标记为0-4
show_bboxes(fig.axes, anchors * bbox_scale, ['0', '1', '2', '3', '4']);
'''labels[0]:labels[1]:掩码,形状为(批量大小,锚框数的4倍),对应每个锚框的4个偏移量(负类掩码为0),通过元素乘法,将负类的偏移量过滤掉labels[2]:锚框对应的标签
'''
labels = multibox_target(anchors.unsqueeze(dim=0),ground_truth.unsqueeze(dim=0))
非极大值抑制
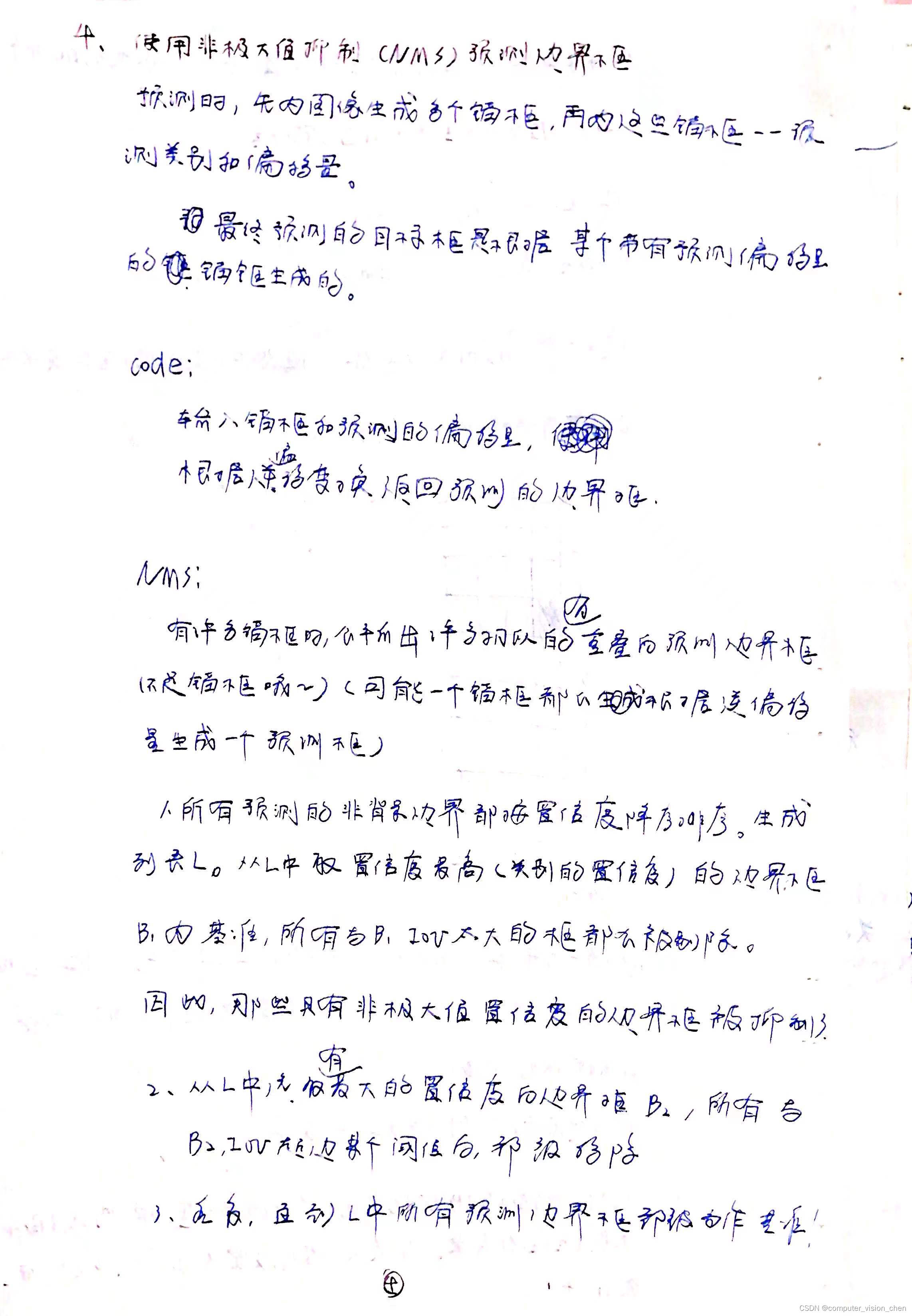
'''在预测时,我们先为图像生成多个锚框,再为这些锚框一一预测类别和偏移量。一个预测好的边界框则根据其中某个带有预测偏移量的锚框而生成。下面我们实现了offset_inverse函数,该函数将锚框和偏移量预测作为输入,并应用逆偏移变换来返回预测的边界框坐标。输入: 锚框 和 偏移量预测输出:根据锚框的原始坐标和预测的偏移量 计算出的 预测的边界框坐标
'''
def offset_inverse(anchors, offset_preds):"""根据带有预测偏移量的锚框来预测边界框"""anc = d2l.box_corner_to_center(anchors)pred_bbox_xy = (offset_preds[:, :2] * anc[:, 2:] / 10) + anc[:, :2]pred_bbox_wh = torch.exp(offset_preds[:, 2:] / 5) * anc[:, 2:]pred_bbox = torch.cat((pred_bbox_xy, pred_bbox_wh), axis=1)predicted_bbox = d2l.box_center_to_corner(pred_bbox)return predicted_bbox
'''按降序对置信度进行排序并返回其索引'''
#@save
def nms(boxes, scores, iou_threshold):"""对预测边界框的置信度进行排序"""B = torch.argsort(scores, dim=-1, descending=True)keep = []# 保留预测边界框的指标while B.numel() > 0:i = B[0]keep.append(i)if B.numel() == 1: breakiou = box_iou(boxes[i, :].reshape(-1, 4),boxes[B[1:], :].reshape(-1, 4)).reshape(-1)inds = torch.nonzero(iou <= iou_threshold).reshape(-1)B = B[inds + 1]return torch.tensor(keep, device=boxes.device)
def multibox_detection(cls_probs, offset_preds, anchors, nms_threshold=0.5,pos_threshold=0.009999999):"""使用非极大值抑制来预测边界框"""device, batch_size = cls_probs.device, cls_probs.shape[0]anchors = anchors.squeeze(0)num_classes, num_anchors = cls_probs.shape[1], cls_probs.shape[2]out = []for i in range(batch_size):cls_prob, offset_pred = cls_probs[i], offset_preds[i].reshape(-1, 4)conf, class_id = torch.max(cls_prob[1:], 0)'''调用offset_inverse'''predicted_bb = offset_inverse(anchors, offset_pred)'''调用nms'''keep = nms(predicted_bb, conf, nms_threshold)# 找到所有的non_keep索引,并将类设置为背景all_idx = torch.arange(num_anchors, dtype=torch.long, device=device)combined = torch.cat((keep, all_idx))uniques, counts = combined.unique(return_counts=True)non_keep = uniques[counts == 1]all_id_sorted = torch.cat((keep, non_keep))class_id[non_keep] = -1class_id = class_id[all_id_sorted]conf, predicted_bb = conf[all_id_sorted], predicted_bb[all_id_sorted]# pos_threshold是一个用于非背景预测的阈值below_min_idx = (conf < pos_threshold)class_id[below_min_idx] = -1conf[below_min_idx] = 1 - conf[below_min_idx]pred_info = torch.cat((class_id.unsqueeze(1),conf.unsqueeze(1),predicted_bb), dim=1)out.append(pred_info)return torch.stack(out)
相关文章:
13.4 目标检测锚框标注 非极大值抑制
锚框的形状计算公式 假设原图的高为H,宽为W 锚框形状详细公式推导 以每个像素为中心生成不同形状的锚框 # s是缩放比,ratio是宽高比 def multibox_prior(data, sizes, ratios):"""生成以每个像素为中心具有不同形状的锚框"""in_he…...
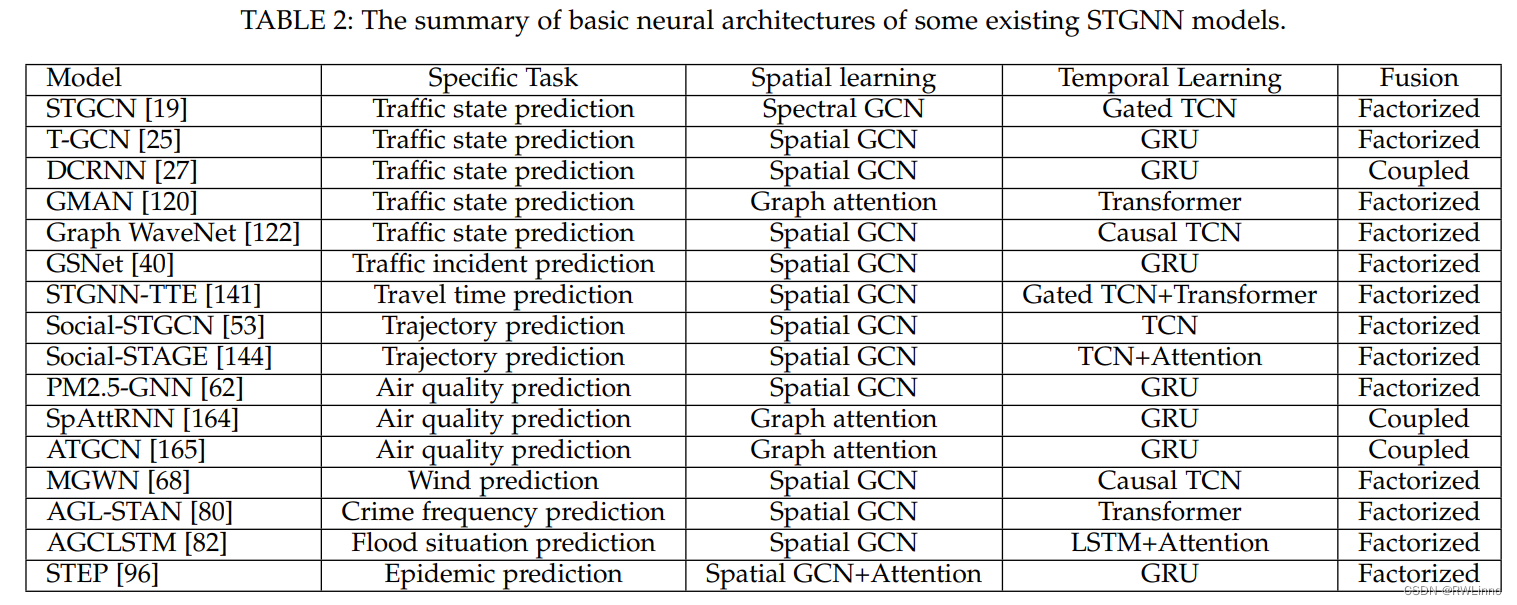
【论文笔记】最近看的时空数据挖掘综述整理8.27
Deep Learning for Spatio-Temporal Data Mining: A Survey 被引用次数:392 [Submitted on 11 Jun 2019 (v1), last revised 24 Jun 2019 (this version, v2)] 主要内容: 该论文是一篇关于深度学习在时空数据挖掘中的应用的综述。论文首先介绍了时空数…...
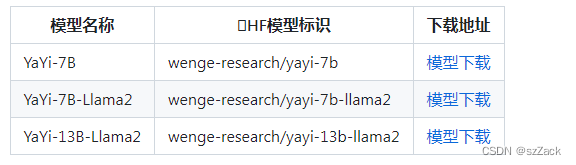
【大模型】基于 LlaMA2 的高 star 的 GitHub 开源项目汇总
【大模型】基于 LlaMA2 的高 star 的 GitHub 开源项目汇总 Llama2 简介开源项目汇总NO1. FlagAlpha/Llama2-ChineseNO2. hiyouga/LLaMA-Efficient-TuningNO3. yangjianxin1/FireflyNO4. LinkSoul-AI/Chinese-Llama-2-7bNO5. wenge-research/YaYiNO6. michael-wzhu/Chinese-LlaM…...
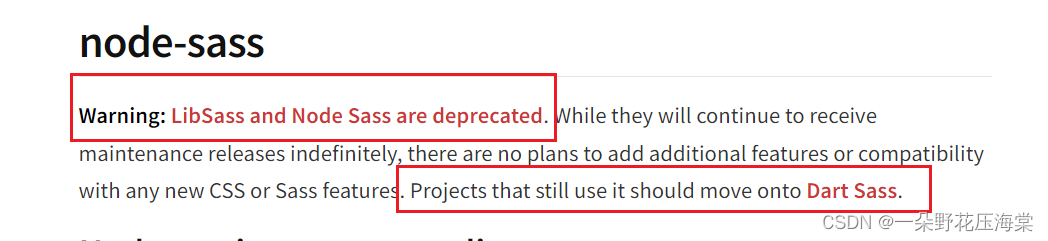
解决elementUI打包上线后icon图标偶尔乱码的问题
解决vue-elementUI打包后icon图标偶尔乱码的问题 一、背景二、现象三、原因四、处理方法方式1:使用css-unicode-loader方式2:升高 sass版本到1.39.0方式3:替换element-ui的样式文件方式4:更换打包压缩方式知识扩展:方式…...
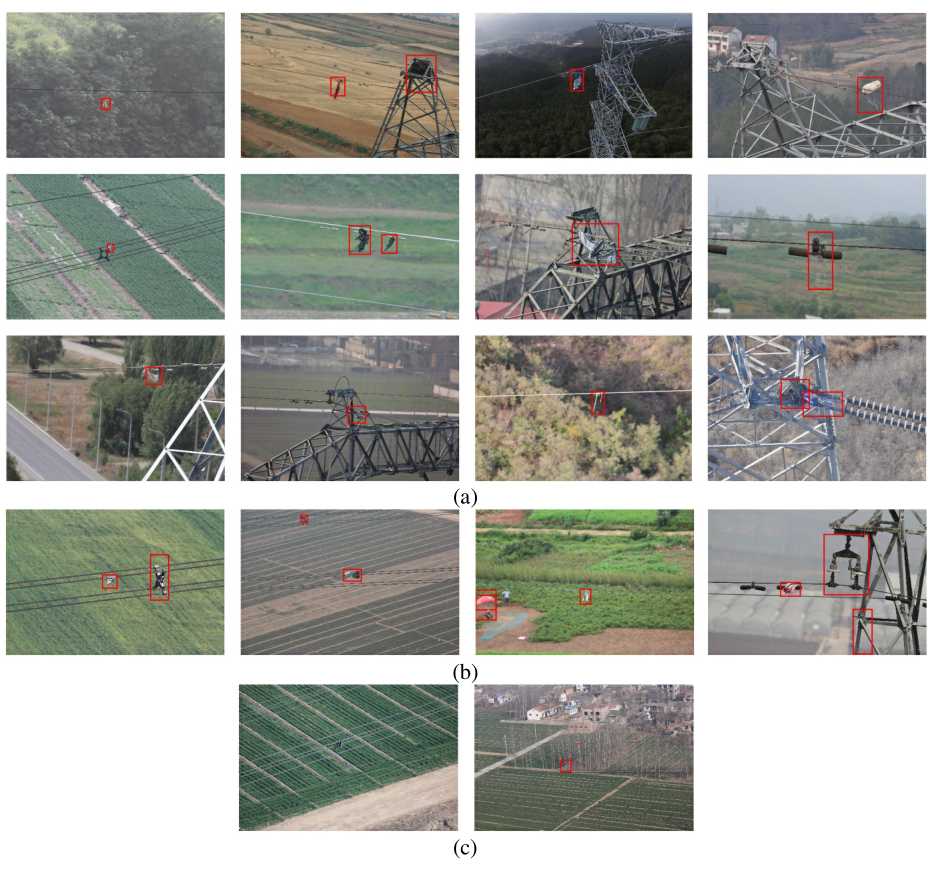
yolov3加上迁移学习和适度的数据增强形成的网络应用在输电线异物检测
Neural Detection of Foreign Objects for Transmission Lines in Power Systems Abstract. 输电线路为电能从一个地方输送到另一个地方提供了一条路径,确保输电线路的正常运行是向城市和企业供电的先决条件。主要威胁来自外来物,可能导致电力传输中断。…...

香橙派OrangePi zero H2+ 驱动移远EC200A
1 系统内核: Linux orangepizero 5.4.65-sunxi #2.2.2 SMP Tue Aug 15 17:45:28 CST 2023 armv7l armv7l armv7l GNU/Linux 1.1 下载内核头安装 下载:orangepi800 内核头rk3399链接https://download.csdn.net/download/weixin_37613240/87635781 1.1.1…...
)
写一个java中如何用JSch来连接sftp的类并做测试?(亲测)
当使用JSch连接SFTP服务器的类,并进行测试时,可以按照以下步骤操作: 添加JSch库的依赖项。在你的项目中添加JSch库的Maven依赖项(如前面所述)或下载JAR文件并将其包含在项目中。 <dependency> <groupId&…...
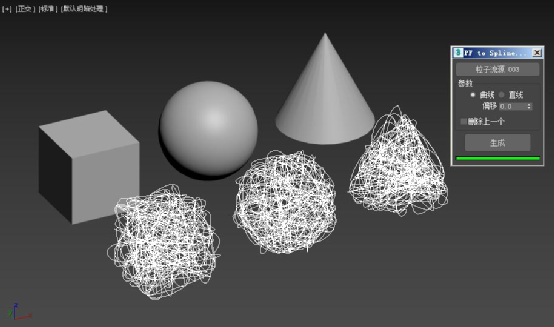
【沐风老师】如何在3dMax中将3D物体转化为样条线构成的对象?
在3dMax中如何把三维物体转化为由样条线构成的对象?通常这样的场景会出现在科研绘图或一些艺术创作当中,下面给大家详细讲解一种3dmax三维物体转样条线的方法。 第一部分:用粒子填充3D对象: 1.创建一个三维对象(本例…...

2023国赛数学建模思路 - 案例:随机森林
文章目录 1 什么是随机森林?2 随机深林构造流程3 随机森林的优缺点3.1 优点3.2 缺点 4 随机深林算法实现 建模资料 ## 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 什么是随机森林ÿ…...
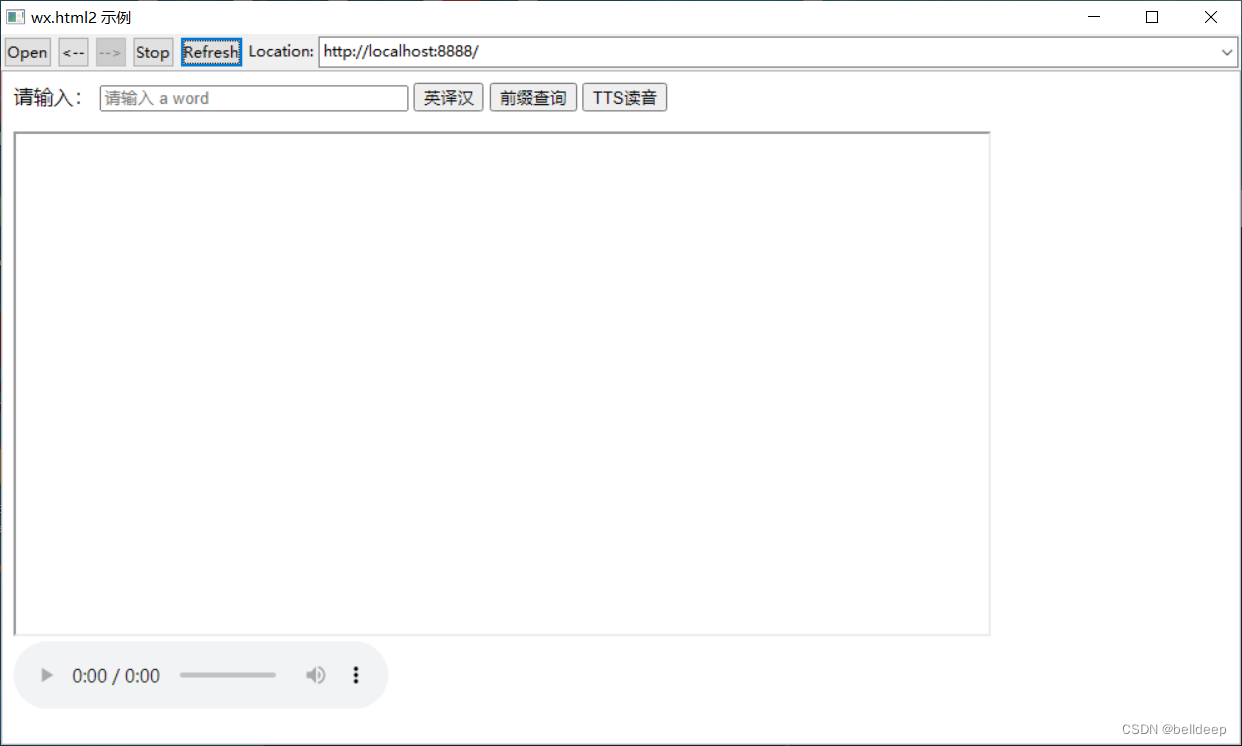
wxpython:wx.html2 是好用的 WebView 组件
wxpython : wx.html2 是好用的 WebView 组件。 pip install wxpython4.2 wxPython-4.2.0-cp37-cp37m-win_amd64.whl (18.0 MB) Successfully installed wxpython-4.2.0 cd \Python37\Scripts wxdemo.exe 取得 wxPython-demo-4.2.0.tar.gz wxdocs.exe 取得 wxPython-docs-4.…...
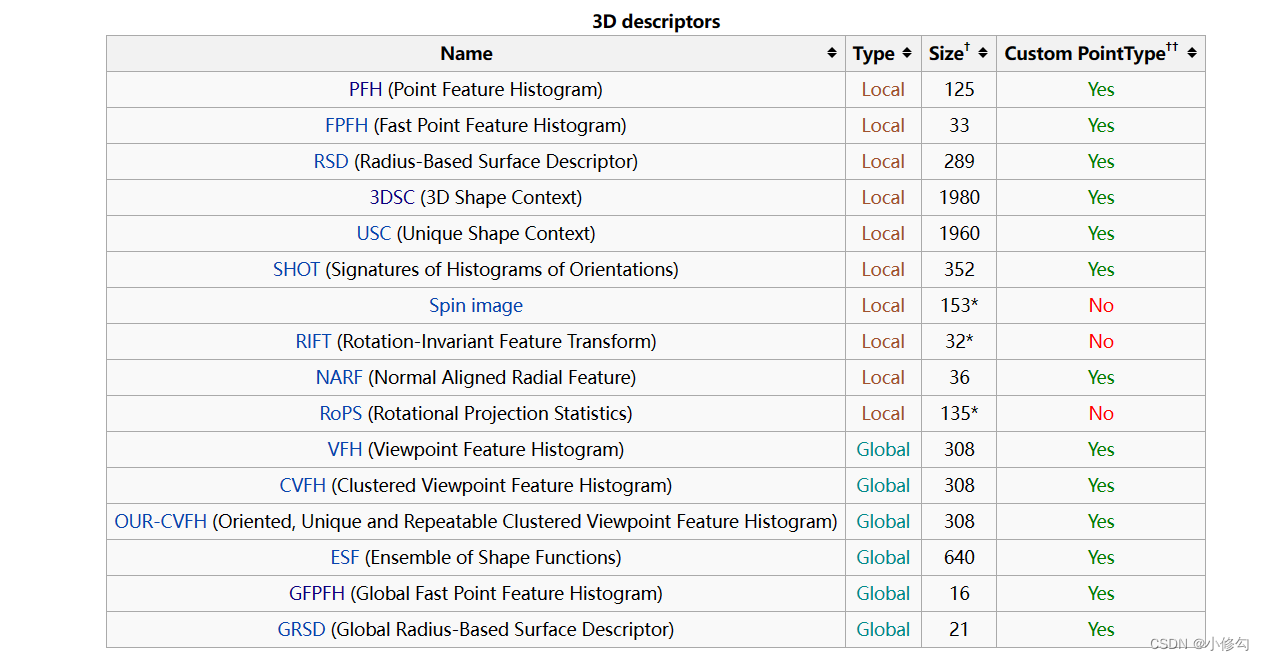
《QT+PCL 第五章》点云特征-PFH
QT增加点云特征PFH 代码用法代码 #include <pcl/io/pcd_io.h> #include <pcl/features/normal_3d.h> #include <pcl/features/pfh.h>int main...
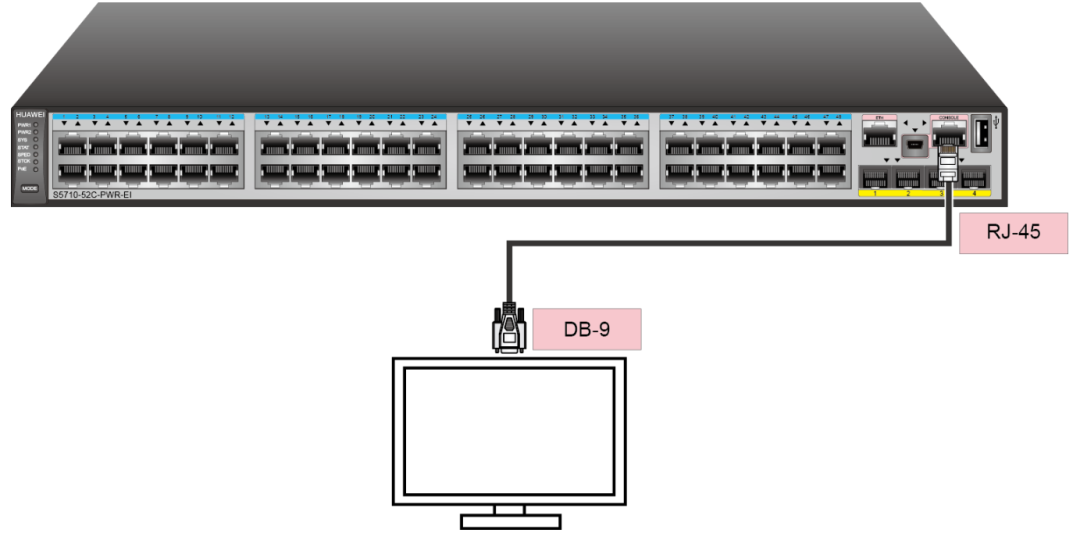
【分享】小型园区组网场景
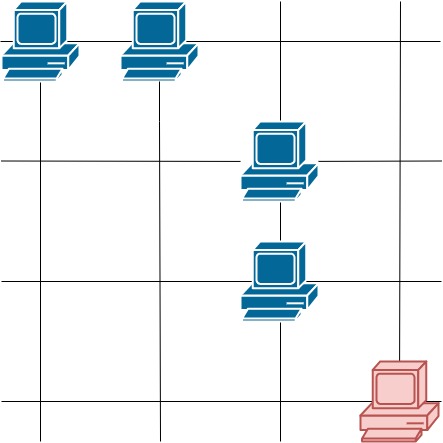
小型园区组网图 在小型园区中,S2700&S3700通常部署在网络的接入层,S5700&S6700通常部署在网络的核心,出口路由器一般选用AR系列路由器。 接入交换机与核心交换机通过Eth-Trunk组网保证可靠性。 每个部门业务划分到一个VLAN中&#…...
LeetCode 1267. 统计参与通信的服务器
【LetMeFly】1267.统计参与通信的服务器 力扣题目链接:https://leetcode.cn/problems/count-servers-that-communicate/ 这里有一幅服务器分布图,服务器的位置标识在 m * n 的整数矩阵网格 grid 中,1 表示单元格上有服务器,0 表…...
)
169. 多数元素(哈希表)
169. 多数元素 给定一个大小为 n 的数组 nums ,返回其中的多数元素。多数元素是指在数组中出现次数 大于 ⌊ n/2 ⌋ 的元素。 你可以假设数组是非空的,并且给定的数组总是存在多数元素。 class Solution { public:int majorityElement(vector<int&…...
微服务集成spring cloud sentinel
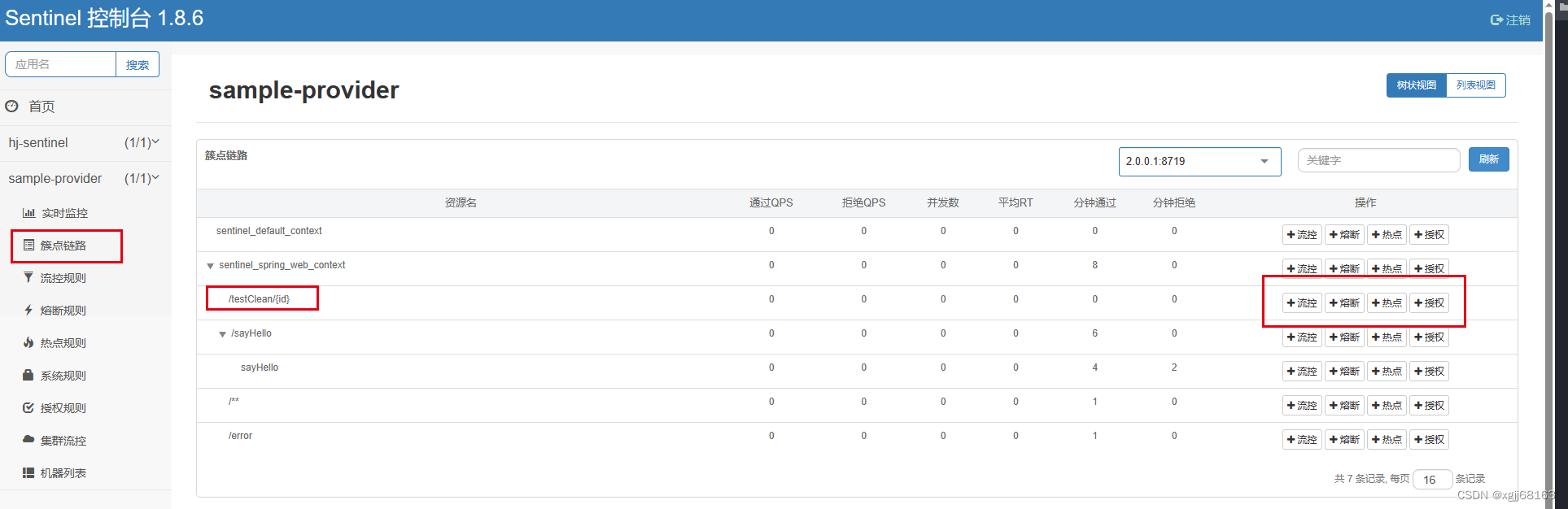
目录 1. sentinel使用场景 2. sentinel组成 3. sentinel dashboard搭建 4. sentinel客户端详细使用 4.1 引入依赖 4.2 application.properties增加dashboard注册地址 4.3 手动增加限流配置类 4.4 rest接口及service类 4.5 通过dashboard动态配置限流规则 1. sentinel使…...
2023年最新版Windows环境下|Java8(jdk1.8)安装教程
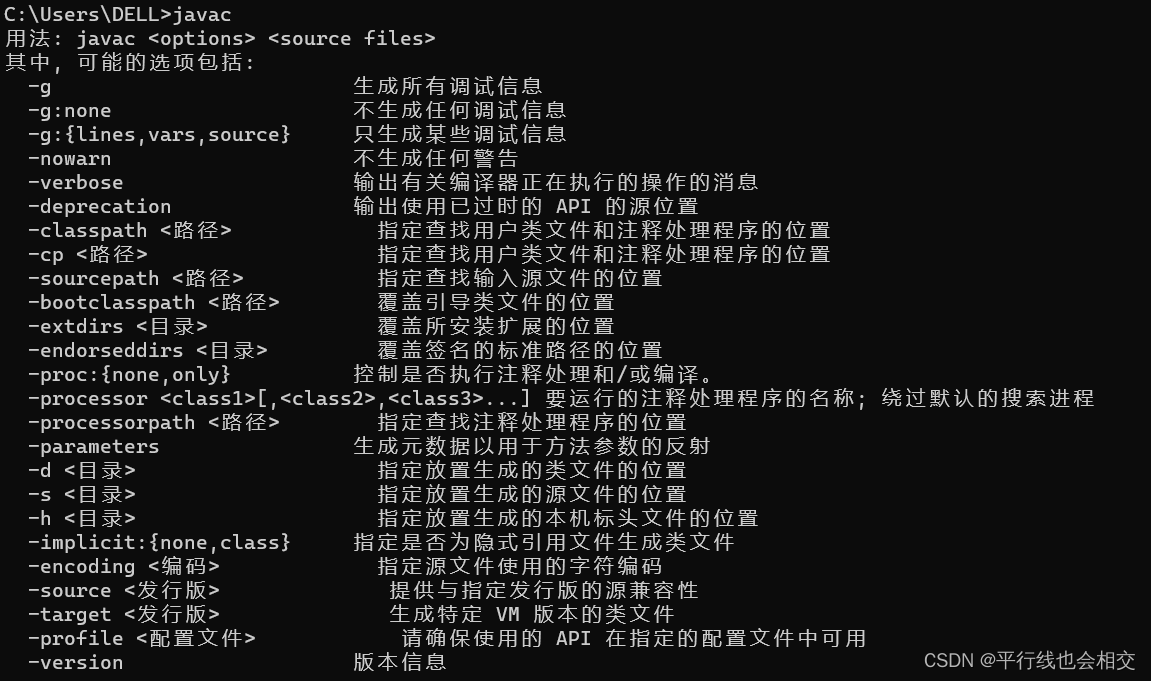
个人主页:平行线也会相交 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 平行线也会相交 原创 收录于专栏【JavaSE_primary】 jdk1.8的下载和使用总共分为3个步骤: jdk1.8的下载、jdk1.8的安装、配置环境变量。 目录 一、jdk1.8下载…...

linux -- jdk 的安装
jdk 的安装 jdk包下载 链接: https://pan.baidu.com/s/1wa1TJGtCPKQqeCGDZWaP6g 密码: 8el6 安装及验证 ## jdk包上传次目录 /usr/local/software cd /usr/local/software tar -zxvf /usr/local/software/jdk-8u212-linux-x64.tar.gz -C /usr/local cd /usr/local mv jdk1…...
网络安全—黑客技术(学习笔记)
1.网络安全是什么 网络安全可以基于攻击和防御视角来分类,我们经常听到的 “红队”、“渗透测试” 等就是研究攻击技术,而“蓝队”、“安全运营”、“安全运维”则研究防御技术。 2.网络安全市场 一、是市场需求量高; 二、则是发展相对成熟…...
Java入职第十一天,深入了解静态代理和动态代理(jdk、cglib)
一、代理模式 一个类代表另一个类去完成扩展功能,在主体类的基础上,新增一个代理类,扩展主体类功能,不影响主体,完成额外功能。比如买车票,可以去代理点买,不用去火车站,主要包括静态代理和动态代理两种模式。 代理类中包含了主体类 二、静态代理 无法根据业务扩展,…...

Snappy算法:高速压缩和解压缩技术的顶尖玩家
文章首发地址 Snappy是一种快速压缩和解压缩数据的算法。它是由Google开发的,旨在提供高速的压缩和解压缩速度,同时保持较高的压缩比。 Snappy算法的设计目标是追求速度而不是最高的压缩率。相比于其他压缩算法(如Gzip或LZ77)&am…...

如何用bsf创建第一个3D场景:从零开始的完整教程
如何用bsf创建第一个3D场景:从零开始的完整教程 【免费下载链接】B3DFramework Modern C library for the development of real-time graphical applications 项目地址: https://gitcode.com/gh_mirrors/bs/B3DFramework bsf(B3DFramework&#x…...

Agentic Workflow实战:多智能体分治架构设计与落地
1. 项目概述:这不是“写个脚本”,而是重新设计人与AI协作的神经回路“Getting Started With Agentic Workflows”——这个标题乍看像一份入门指南,但如果你真把它当成“教你怎么装个Python包”,那接下来三个月你大概率会卡在第三步…...

Unity 2D开发核心原理:坐标系统、物理引擎与资源契约
1. 为什么“Unity 2D 游戏开发教程(二)”不是续集,而是分水岭 很多人点开这个标题,下意识以为是“上一讲的延续”,就像看剧追更一样等着主角升级打怪。但实际在Unity 2D开发的真实工作流里,“第二讲”从来不…...
)
用 5 款全栈电商微系统打通你的前后端核心逻辑链路(附级联 Prompt)
各位大前端、全栈开发以及正在寻求技术进阶的同仁们,大家好。在日常的技术社区里,我们经常能看到各种流于表面的前端 UI 静态页或者几行代码拼凑的后端 CRUD 示例。但真正能在一个全栈工程师的履历中起到定海神针作用的,往往是那些功能内敛、…...

星火动漫 × 火山引擎:用Seedance重构创作链路加速释放AI漫剧生产力
20 天能做什么?在传统动漫制作的管线里,这点时间或许只够画完一套分镜稿。但就是在这短短 20 天内,一部名为《西游:五指山上贴瓷砖》的漫剧不仅完成了全流程制作,更一路杀出重围,连续多日霸榜。若按常规路径…...
)
Git从入门到工作流:GitLab私有仓库最佳实践(SSH免密、.DS_Store全局忽略)
本文将带你从零开始配置GitLab私有仓库,涵盖SSH密钥免密登录、本地仓库初始化与推送、以及macOS下.DS_Store文件的全局忽略与清理。每一步都有命令和解释,适合新手和想规范Git工作流的开发者。 一、注册GitLab账号并创建私有仓库 1. 注册账号 访问 Git…...

百考通智能降重——为原创保驾护航 ��️
在毕业季的焦虑中,“降重”常被误解为一场与查重系统的文字游击战: 换同义词、调语序、加废话…… 但真正的问题从来不是“字重复”,而是表达缺乏原创性。 当你的论文充斥着“研究表明”“可以发现”“具有重要意义”这类千篇一律的学术套话…...

yolo26 语义分割特征融合:全网首发--使用 ERM 模块改进 Neck 多尺度特征融合能力 ✨
1. 工程简介 🚀 本工程基于 Ultralytics 框架扩展,面向语义分割与 YOLO 系列模型改进实验。核心特点是通过切换 yaml 配置文件,即可快速完成不同网络结构的训练、对比与验证,无需为每个模型单独编写训练脚本。 当前已支持的主要模型家族 🧩 语义分割模型:UNet、UNet+…...
)
告别手动排版!用EndNote 20的Word插件搞定论文参考文献(附中科大培训同款期刊格式下载)
科研写作效率革命:EndNote 20与Word协同实战指南 当论文第三稿被导师要求调整章节顺序时,你是否经历过手动重新编号200条参考文献的绝望?这种场景在科研群体中几乎成为集体记忆痛点——据Nature最新调研显示,87%的研究者曾因文献…...

华为OD机试真题 新系统 2026-05-20 PythonJS 实现【等距二进制判断】
目录 题目 思路 Code 题目 对于一个二进制数,我们定义相邻两个 1 之间的 0 的数量为它们两个之间的距离,如 1001011,相邻两个 1 之间的距离从左到右分别为 2、1、0。 现在如果一个整数转化为二进制数满足如下条件: 1. 包含不少于 3 个 1 2. 所有相邻数字 1 之间的距离都…...