ubuntu20.04中ros2安装rosbridge及启动方式
ros2 启动rosbridge:
要启动ROS2中的rosbridge,需要先安装ROS2的rosbridge_suite软件包。使用以下命令安装:
sudo apt-get update
sudo apt-get install ros-<distro>-rosbridge-suite
将<distro>替换为正在使用的ROS2发行版的名称,我的开发板是foxy。
安装完成后,可以使用以下命令启动rosbridge:
ros2 launch rosbridge_server rosbridge_websocket_launch.xmlros2 run rosbridge_server rosbridge_websocket
这将启动rosbridge服务器并在WebSocket端口(默认为9090)上监听传入的连接请求。现在可以使用WebSocket客户端连接到rosbridge服务器,并使用ROS2消息进行通信。
ps:
在启动rosbridge的时候可能遇到报错:
cindy@ubuntu:~$ ros2 launch rosbridge_server rosbridge_websocket_launch.xml [INFO] [launch]: All log files can be found below /home/cindy/.ros/log/2023-08-25-11-04-02-495747-ubuntu-90823 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [rosbridge_websocket-1]: process started with pid [90825] [INFO] [rosapi_node-2]: process started with pid [90827] [rosbridge_websocket-1] Traceback (most recent call last): [rosbridge_websocket-1] File "/opt/ros/foxy/lib/rosbridge_server/rosbridge_websocket", line 45, in <module> [rosbridge_websocket-1] from rosbridge_library.capabilities.subscribe import Subscribe [rosbridge_websocket-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rosbridge_library/capabilities/subscribe.py", line 38, in <module> [rosbridge_websocket-1] from rosbridge_library.internal.pngcompression import encode as encode_png [rosbridge_websocket-1] File "/opt/ros/foxy/lib/python3.8/site-packages/rosbridge_library/internal/pngcompression.py", line 37, in <module> [rosbridge_websocket-1] from PIL import Image [rosbridge_websocket-1] ModuleNotFoundError: No module named 'PIL' [ERROR] [rosbridge_websocket-1]: process has died [pid 90825, exit code 1, cmd '/opt/ros/foxy/lib/rosbridge_server/rosbridge_websocket --ros-args -r __node:=rosbridge_websocket --params-file /tmp/launch_params_a52mg6ze --params-file /tmp/launch_params_4ik_ubfb --params-file /tmp/launch_params_hne3k2bh --params-file /tmp/launch_params_zjtdbmwi --params-file /tmp/launch_params__akyk0l9 --params-file /tmp/launch_params_rpbmxoz9 --params-file /tmp/launch_params_1_ygw841 --params-file /tmp/launch_params_xsxxbbd5 --params-file /tmp/launch_params_0v3jj0yl --params-file /tmp/launch_params_mqfiurda --params-file /tmp/launch_params_o70a8uof --params-file /tmp/launch_params_i7wcqg3t'].
这个错误提示是因为缺少PIL模块导致的。PIL是Python Imaging Library的缩写,它是Python的一个图像处理库,rosbridge_server需要用到它来进行图像压缩。需要安装PIL模块,可以使用以下命令来安装:
pip3 install pillow
安装完成后,再次尝试启动rosbridge_server,应该就不会再出现这个错误了。
相关文章:

ubuntu20.04中ros2安装rosbridge及启动方式
ros2 启动rosbridge: 要启动ROS2中的rosbridge,需要先安装ROS2的rosbridge_suite软件包。使用以下命令安装: sudo apt-get update sudo apt-get install ros-<distro>-rosbridge-suite将<distro>替换为正在使用的ROS2发行版的名…...

TCP之超时重传、流量控制和拥塞控制
一、超时重传 TCP超时重传是TCP协议中的一种机制,用于在发生丢包或数据包未及时确认的情况下,重新发送未确认的数据段。 当发送方发送一个数据段后,会启动一个定时器(称为超时计时器),等待接收方的确认。…...

git clone 报SSL证书问题
git命令下运行 git config --global http.sslVerify false 然后再进行重新clone代码...

Spring Boot 排除配置类的引用的方法
Spring Boot 提供的自动配置非常强大,某些情况下,自动配置的功能可能不符合我们的需求,需要我们自定义配置,这个时候就需要排除/禁用 Spring Boot 某些类的自动化配置了。 比如:数据源、邮件,这些都是提供…...
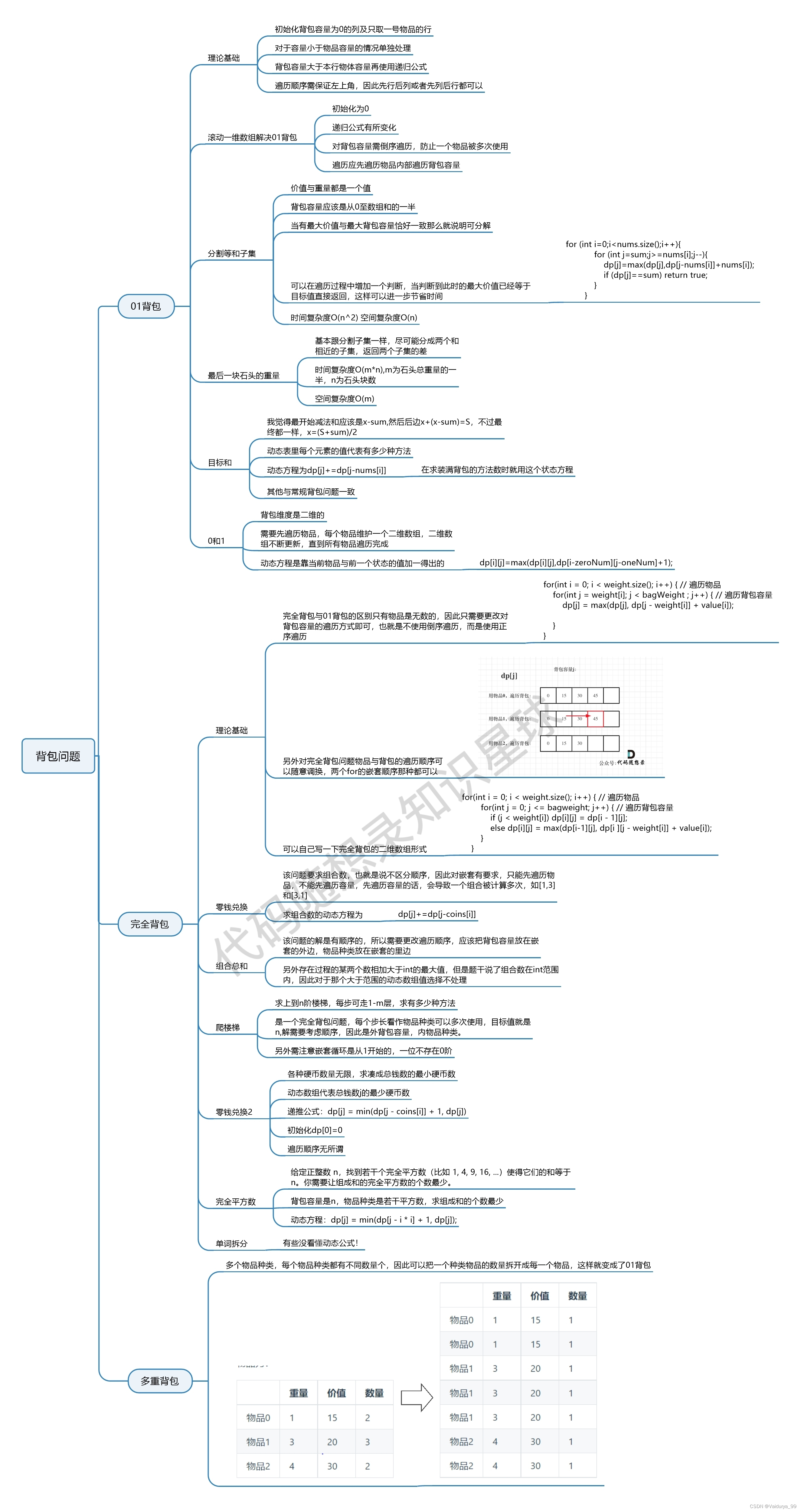
代码随想录打卡—day46—【DP】— 8.29 背包END
1 139. 单词拆分 139. 单词拆分 做了很久...估计2h 一开始我的思路卡死了 看题解之后的思路的详解见注释, 我的写法和carl 答案在一些微小的细节上略有不同,我的更好理解,但他的解法更简单。 我写的过程中,需要注意下标和字符…...

lua学习-3 循环和流程控制
这里写目录标题 判断for 循环数值遍历泛型遍历遍历数组遍历对象ipairs 和 pairs的异同 while 循环repeat循环goto基础用法注意事项 判断 for 循环 数值遍历 for exp1,exp2,exp3 do//todoend上述代码是指:从exp1 到exp2 以exp3为步长进行循环并执行todo代码&#…...
3、监测数据采集物联网应用开发步骤(3)
监测数据采集物联网应用开发步骤(2) 系统整体结构搭建 新建项目 输入项目名称:MonitorData 所谓兵马未动粮草先行,按下图创建好对应的模块备用: com.plugins 业务插件模块 com.zxy.adminlog 日志或文本文…...

MySQL用户管理及用户权限
目录 数据库用户管理 新建用户 查看用户 重命名用户rename 删除用户drop 修改用户密码 找回root密码 数据库用户授权 授予权限 查看用户权限 撤销用户权限 数据库用户管理 新建用户 CREATE USER 用户名来源地址 [IDENTIFIED BY [PASSWORD] 密码];用户名:…...
Yolov8-pose关键点检测:模型轻量化创新 | PConv结合c2f | CVPR2023 FasterNet
💡💡💡本文解决什么问题:新的partial convolution(PConv),通过同时减少冗余计算和内存访问可以更有效地提取空间特征。 PConv| GFLOPs从9.6降低至8.5,参数量从6482kb降低至6134kb, mAP50从0.921提升至0.925 Yolov8-Pose关键点检测专栏介绍:https://blog.csdn.n…...

聊聊mybatis-plus的SafetyEncryptProcessor
序 本文主要研究一下mybatis-plus的SafetyEncryptProcessor SafetyEncryptProcessor mybatis-plus-boot-starter/src/main/java/com/baomidou/mybatisplus/autoconfigure/SafetyEncryptProcessor.java public class SafetyEncryptProcessor implements EnvironmentPostProc…...
可视化点云的工具汇总】)
【PCL (Point Cloud Library)可视化点云的工具汇总】
PCL (Point Cloud Library)可视化点云的工具 PCL (Point Cloud Library) 提供了一系列的工具和类用于点云的可视化。以下是其中的一些主要工具和功能: pcl::visualization::CloudViewer: 如前所述,这是一个简单易用的可视化工具,主要用于基本的点云显示。pcl::visualizatio…...
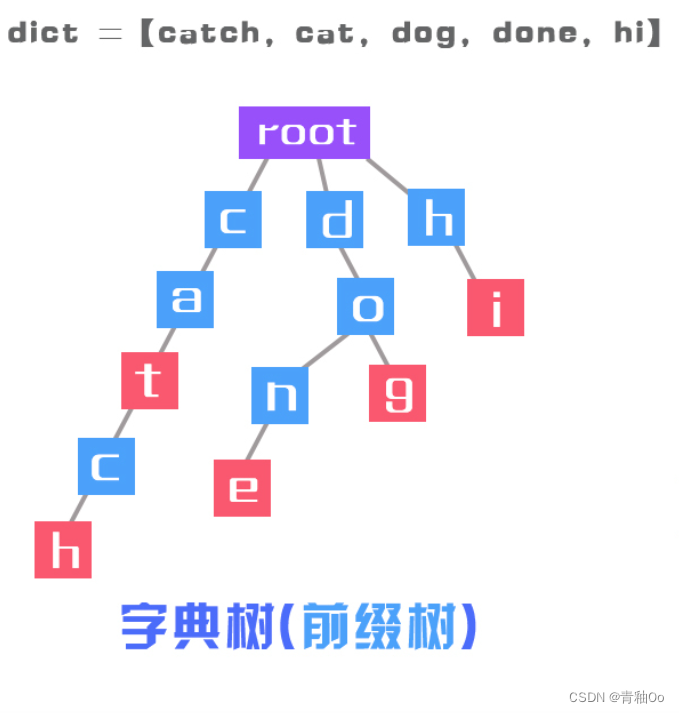
实现 Trie (前缀树)
题目链接 实现 Trie (前缀树) 题目描述 注意点 word 和 prefix 仅由小写英文字母组成 解答思路 首先要理解前缀树是什么,参照该篇文章【图解算法】模板变式——带你彻底搞懂字典树(Trie树)在了解前缀树是什么后,设计前缀树就会更加容易,…...
ElasticSearch基础知识汇总
文章目录 前言一、认识ElasticSearch1.正向索引和倒排索引2. MySql与ElasticSearc3.IK分词器 二、ES索引库操作1.mapping映射属性2.索引库的CRUD 三、ES文档库操作 前言 Elasticsearch是一个基于Lucene的搜索服务器。它提供了一个分布式多用户能力的全文搜索引擎,基…...

服务器数据库中了locked勒索病毒怎么办,locked勒索病毒恢复工具
最近一段时间网络上的locked勒索病毒非常嚣张,自从6月份以来,很多企业的计算机服务器数据库遭到了locked勒索病毒的攻击,起初locked勒索病毒攻击用友畅捷通T用户,后来七月份开始攻击金蝶云星空客户,导致企业的财务系统…...

没有 JavaScript 计时器的自动播放轮播 - CSS 动画
先看效果: 再看代码(查看更多): <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>计时器</title><style>* {padding: 0;margin: 0;box-siz…...
《Flink学习笔记》——第三章 Flink的部署模式
不同的应用场景,有时候对集群资源的分配和占用有不同的需求。所以Flink为各种场景提供了不同的部署模式。 3.1 部署模式(作业角度/通用分类) 根据集群的生命周期、资源的分配方式、main方法到底在哪里执行——客户端还是Client还是JobManage…...

网络安全(黑客技术)0基础学习手册
目录梗概 一、自学网络安全学习的误区和陷阱 二、学习网络安全的一些前期准备 三、网络安全学习路线 四、学习资料的推荐 想自学网络安全(黑客技术)首先你得了解什么是网络安全!什么是黑客! 网络安全可以基于攻击和防御视角来…...
腾讯云服务器价格表大全_轻量服务器_CVM云服务器报价明细
腾讯云服务器租用费用表:轻量应用服务器2核2G4M带宽112元一年,540元三年、2核4G5M带宽218元一年,2核4G5M带宽756元三年、云服务器CVM S5实例2核2G配置280.8元一年、GPU服务器GN10Xp实例145元7天,腾讯云服务器网长期更新腾讯云轻量…...
vue中bus的使用和涉及到的问题
创建一个js文件 import Vue from "Vue" export default new Vue 我们可以直接在要使用的页面中引用使用 import bus from /assets/js/eventBus.js;bus.$emit("info", "123") // 使用bus.$on("info", (val) > { // 接收console.l…...

Flink的简要概述
以下是Flink的各种架构的简要概述: 1. Flink概述:Apache Flink是一个开源的流处理和批处理框架,具有高性能、容错性和数据一致性保证。它支持事件驱动的流处理和批量处理,并提供了丰富的API和工具来处理实时数据流和大规模数据集…...
)
别再手动数脉冲了!用STM32定时器编码器模式搞定增量编码器(附CubeMX配置)
STM32硬件编码器模式实战:精准捕获增量编码器信号的工程指南 在电机控制、机器人关节定位和精密测量系统中,增量式编码器作为核心反馈元件,其信号处理质量直接影响整个系统的控制精度。传统的中断计数方式在高速脉冲场景下往往捉襟见肘&#…...

单元幕墙组装检验标准
单元幕墙组装检验标准 1 范围 本标准规定了沈阳远大企业集团单元幕墙组装的检验项目、检验方法、检验工具、质量评定方法。 本标准适用于单元幕墙板块的组装检验。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款,凡是注日期的引用文件,其随后所…...

AI智能体开发新范式:用TDD工程化方法构建可靠LLM应用
1. 项目概述:当AI智能体遇上测试驱动开发最近在GitHub上看到一个挺有意思的项目,叫agent-skill-tdd。光看名字,就能嗅到一股“新老结合”的味道——一边是当下火热的AI智能体(Agent),另一边是软件工程领域经…...
)
不止于测温:用MAX31855和K型热电偶搭建一个低成本高精度温度监控系统(附STM32源码)
从热电偶到云端:基于MAX31855的高精度温度监测系统全栈开发指南 在工业自动化、实验室监测甚至家庭酿造等场景中,温度数据的精确采集与实时监控往往成为项目成败的关键。传统温度传感器虽然简单易用,但在高温、腐蚀性环境或需要极高精度的场合…...

3大核心优势:为什么GanttProject能让你秒懂项目管理
3大核心优势:为什么GanttProject能让你秒懂项目管理 【免费下载链接】ganttproject Official GanttProject repository. 项目地址: https://gitcode.com/gh_mirrors/ga/ganttproject 你是否曾经面对复杂的项目计划感到无从下手?GanttProject这款免…...

水介导软模板 COF|MS 模拟细节全拆解
#MaterialsStudio #COF 模拟 #Nature 子刊 #科研干货 #分子模拟🔥Nature 子刊 COF 重磅突破!四川大学团队首次用软模板法做出有序分级孔 COF里面的 Materials Studio 模拟部分写得超规范新手做 COF 晶体模拟直接抄作业👇✅ 模拟工具与核心方法…...

微信网页版访问技术突破:基于请求伪装的多浏览器兼容解决方案
微信网页版访问技术突破:基于请求伪装的多浏览器兼容解决方案 【免费下载链接】wechat-need-web 让微信网页版可用 / Allow the use of WeChat via webpage access 项目地址: https://gitcode.com/gh_mirrors/we/wechat-need-web 微信网页版访问限制一直是开…...

Linux入门篇之RK3588基于Buildroot系统下安装交叉编译器
一、交叉编译器 交叉编译器是一种能够在一种计算机平台上生成另一种平台可执行代码的编译器。例如,在x86架构的PC上编译出运行于ARM架构嵌入式设备的程序。与本地编译器不同,交叉编译器的编译环境和运行环境是分离的。 二、为什么需要交叉编译器&#…...

Taotoken用量看板如何让我们清晰掌握各模型消耗与团队使用习惯
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken用量看板如何让我们清晰掌握各模型消耗与团队使用习惯 作为团队管理者,在引入大模型能力支持业务开发时&#…...

3分钟掌握Illustrator批量替换神器:ReplaceItems.jsx终极效率指南
3分钟掌握Illustrator批量替换神器:ReplaceItems.jsx终极效率指南 【免费下载链接】illustrator-scripts Adobe Illustrator scripts 项目地址: https://gitcode.com/gh_mirrors/il/illustrator-scripts 还在为Illustrator中重复的替换操作烦恼吗?…...