Linux系统点亮LED
目录
- 应用层操控硬件的两种方式
- sysfs 文件系统
- sysfs 与/sys
- 总结
- 标准接口与非标准接口
- LED 硬件控制方式
- 编写LED 应用程序
- 在开发板上测试
对于一款学习型开发板来说,永远都绕不开LED 这个小小的设备,基本上每块板子都至少会有一颗
LED 小灯,对于我们的ALPHA/Mini I.MX6U 开发板来说同样也是如此。
ALPHA/Mini I.MX6U 开发板(包括核心板和底板)上一共有3 颗LED 小灯,当仅有一颗LED 能够被用户所控制,其它两颗均作为电源指示灯而存在,用户对其不可控制;LED 通常是由GPIO 所控制的,本章我们来学习如何编写应用程序控制LED 灯的亮灭。
应用层操控硬件的两种方式
在Linux 系统下,一切皆文件!应用层如何操控底层硬件,同样也是通过文件I/O 的方式来实现,前面我们给大家介绍了设备文件,包括字符设备文件和块设备文件,为啥叫设备文件?大家有没有想过这个问题呢?其实设备文件便是各种硬件设备向应用层提供的一个接口,应用层通过对设备文件的I/O 操作来操控硬件设备,譬如LCD 显示屏、串口、按键、摄像头等等,所以设备文件其实是与硬件设备相互对应的。设备文件通常在/dev/目录下,我们也把/dev 目录下的文件称为设备节点。
设备节点并不是操控硬件设备的唯一途径,除此之外,我们还可以通过sysfs 文件系统对硬件设备进行操控,接下来将进行介绍!
sysfs 文件系统
简单的说,sysfs 是一个基于内存的文件系统,同devfs、proc 文件系统一样,称为虚拟文件系统;它的作用是将内核信息以文件的方式提供给应用层使用。7.7 小节中我们学习过proc 文件系统,应用层可以通过
proc文件系统得到系统信息和进程相关信息,与proc文件系统类似,sysfs 文件系统的主要功能便是对系统设备进行管理,它可以产生一个包含所有系统硬件层次的视图。
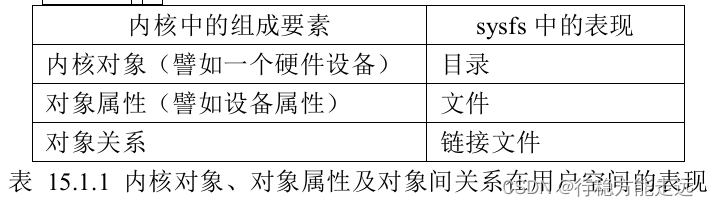
sysfs 文件系统把连接在系统上的设备和总线组织成为一个分级的文件、展示设备驱动模型中各组件的层次关系。sysfs 提供了一种机制,可以显式的描述内核对象、对象属性及对象间关系,用来导出内核对象
(kernel object,譬如一个硬件设备)的数据、属性到用户空间,以文件目录结构的形式为用户空间提供对这些数据、属性的访问支持。表15.1.1 描述了内核对象、对象属性及对象间关系在用户空间sysfs 中的的表现:
sysfs 与/sys
sysfs 文件系统挂载在/sys 目录下,启动ALPHA/Mini I.MX6U 开发板,进入Linux 系统(开发板出厂系统)之后,我们进入到/sys 目录下查看,如下所示:
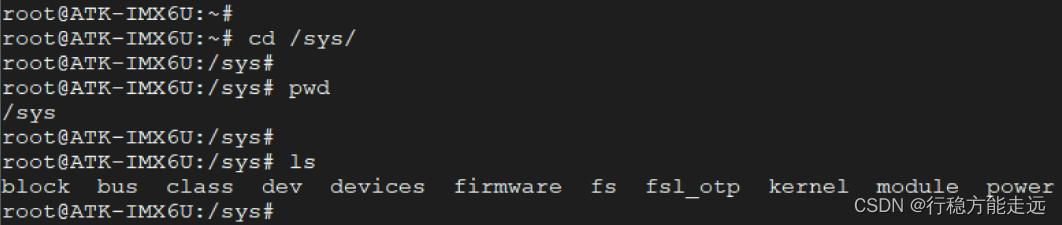
上图显示的便是sysfs 文件系统中的目录,包括block、bus、class、dev、devices、firmware、fs、kernel、
modules、power 等,每个目录下又有许多文件或子目录,对这些目录的说明如所示:
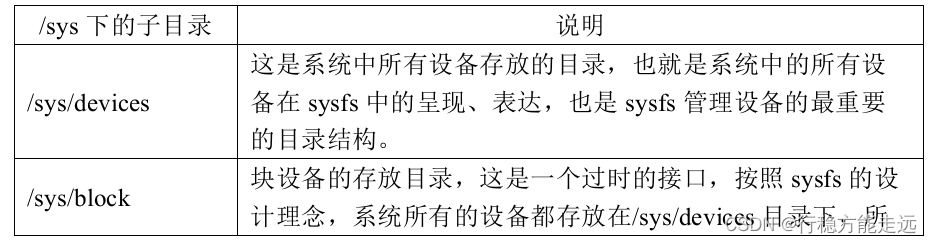
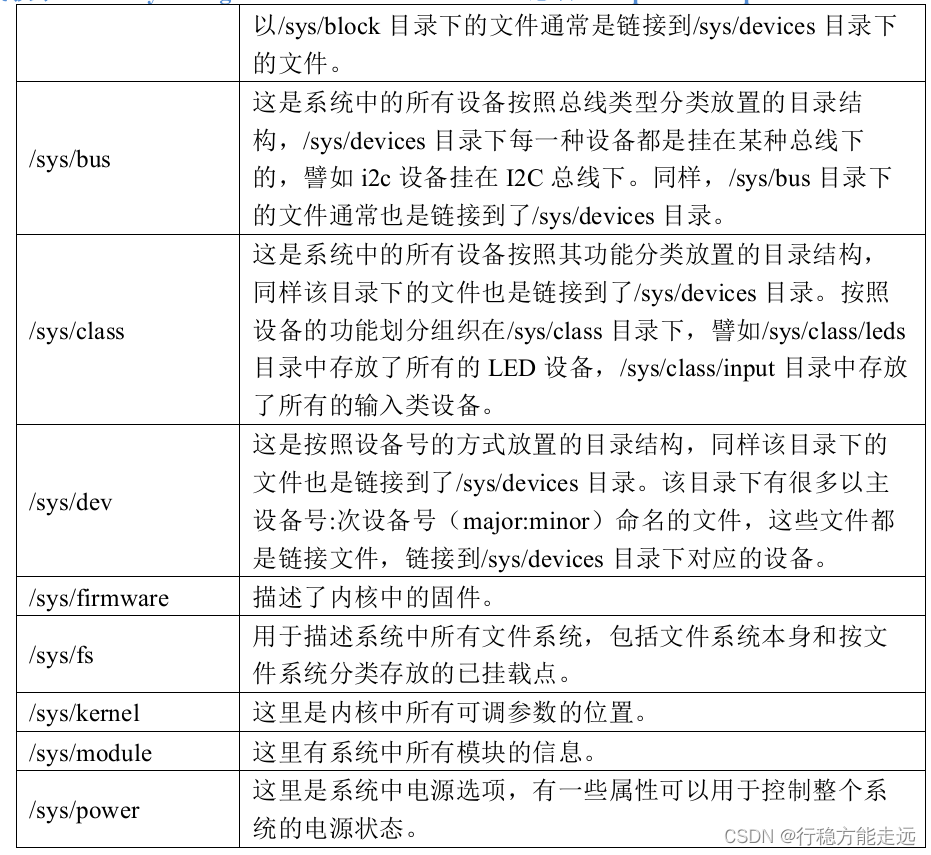
系统中所有的设备(对象)都会在/sys/devices 体现出来,是sysfs 文件系统中最重要的目录结构;而
/sys/bus、/sys/class、/sys/dev 分别将设备按照挂载的总线类型、功能分类以及设备号的形式将设备组织存放在这些目录中,这些目录下的文件都是链接到了/sys/devices 中。
设备的一些属性、数据通常会通过设备目录下的文件体现出来,也就是说设备的数据、属性会导出到用户空间,以文件形式为用户空间提供对这些数据、属性的访问支持,可以把这些文件称为属性文件;读这些属性文件就表示读取设备的属性信息,相反写属性文件就表示对设备的属性进行设置、以控制设备的状态。
总结
这里给大家进行一个总结,应用层想要对底层硬件进行操控,通常可以通过两种方式:
⚫ /dev/目录下的设备文件(设备节点);
⚫ /sys/目录下设备的属性文件。
具体使用哪种方式需要根据不同功能类型设备进行选择,有些设备只能通过设备节点进行操控,而有些设备只能通过sysfs 方式进行操控;当然跟设备驱动具体的实现方式有关,通常情况下,一般简单地设备会使用sysfs 方式操控,其设备驱动在实现时会将设备的一些属性导出到用户空间sysfs 文件系统,以属性文件的形式为用户空间提供对这些数据、属性的访问支持,譬如LED、GPIO 等。
但对于一些较复杂的设备通常会使用设备节点的方式,譬如LCD 等、触摸屏、摄像头等。
标准接口与非标准接口
Linux 内核中为了尽量降低驱动开发者难度以及接口标准化,就出现了设备驱动框架的概念;Linux 针对各种常见的设备进行分类,譬如LED 类设备、输入类设备、FrameBuffer 类设备、video 类设备、PWM 设备等等,并为每一种类型的设备设计了一套成熟的、标准的、典型的驱动实现的框架,这个就叫做设备驱动框架。设备驱动框架为驱动开发和应用层提供了一套统一的接口规范,譬如对LED 类设备来说,内核提供了LED 设备驱动框架,驱动工程师编写LED 驱动时,使用LED 驱动框架来开发自己的LED 驱动程序,这样做的好处就在于,能够对上层应用层提供统一、标准化的接口、同时又降低了驱动开发工程师的难度。
编写LED 驱动程序并不仅仅只能使用内核设计的LED 设备驱动框架,不用内核的LED 驱动框架也是可以开发出LED 驱动程序的,但如果你这样写,使用这个驱动程序注册的LED 那就不是标准设备了,因为该驱动程序向应用层提供的接口并不是统一、标准化接口。
除此之外,还有很多硬件外设,尤其是嵌入式系统中所使用到的这些硬件外设,它们可能并不属于Linux
系统所规划的设备分类当中的任何一种设备类型,譬如在Linux 系统中,有一种设备类型叫杂散/杂项类设备(misc device),大家可以想一想为啥叫杂散类设备,说明这种设备既不属于这种设备类型、又不属于另一种设备类型,无奈只能把它归为杂项类。
因为一个计算机系统所能够连接、使用的外设实在太多了,不可能每一种外设都能够精准地分类到某一个设备类型中,通常把这些无法进行分类的外设就称为杂项设备,杂项设备驱动程序向应用层提供的接口通常都不是标准化接口、它是一种非标准接口,具体如何去操控这个设备通常只有驱动工程师知道。所以在嵌入式系统中,很多硬件外设的驱动程序都是定制的。
LED 硬件控制方式
ALPHA/Mini I.MX6U 开发板底板上有一颗可被用户控制的LED 灯,如下所示:
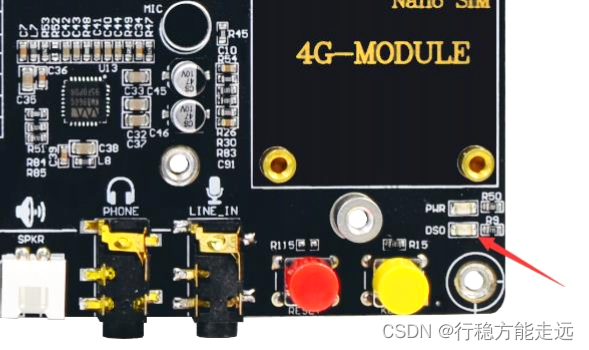
上图中箭头所指的LED 便是开发板上唯一一个可以被用户所控制的LED,另外一颗LED 则(名称为
PWR)是底板上的电源指示灯。
对于ALPHA/Mini I.MX6U 开发板出厂系统来说,此LED 设备使用的是Linux 内核标准LED 驱动框架注册而成,在/dev 目录下并没有其对应的设备节点,其实现使用sysfs 方式控制。进入到/sys/class/leds 目录下,如下所示:
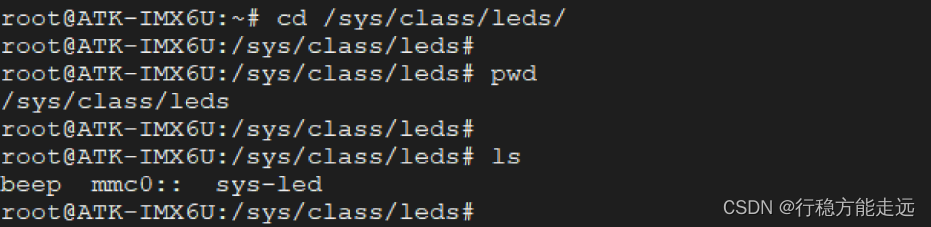
上小节介绍了/sys/class 目录,系统中的所有设备根据其功能分类组织到了/sys/class 目录下,所以
/sys/class/leds 目录下便存放了所有的LED 类设备。从上图可以看到该目录下有一个sys-led 文件夹,这个便是底板上的用户LED 设备文件夹,进入到该目录下,如下所示:
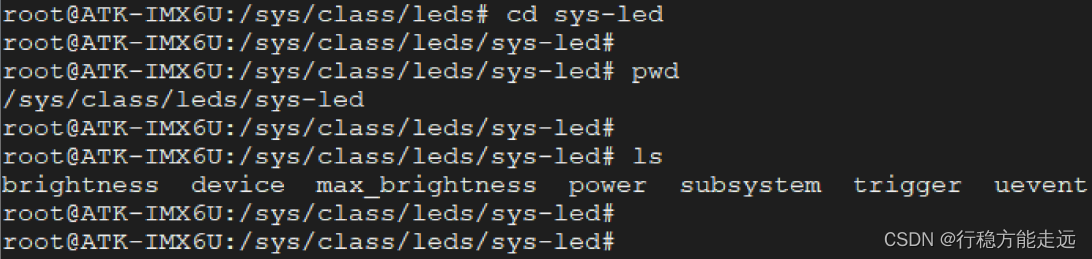
这里我们主要关注便是brightness、max_brightness 以及trigger 三个文件,这三个文件都是LED 设备的属性文件:
⚫ brightness:翻译过来就是亮度的意思,该属性文件可读可写;所以这个属性文件是用于设置LED
的亮度等级或者获取当前LED 的亮度等级,譬如brightness 等于0 表示LED 灭,brightness 为正整数表示LED 亮,其值越大、LED 越亮;对于PWM 控制的LED 来说,这通常是适用的,因为它存在亮度等级的问题,不同的亮度等级对应不同的占空比,自然LED 的亮度也是不同的;但对于GPIO
控制(控制GPIO 输出高低电平)的LED 来说,通常不存在亮度等级这样的说法,只有LED 亮(brightness 等于0)和LED 灭(brightness 为非0 值的正整数)两种状态,ALPHA/Mini I.MX6U
开发板上的这颗LED 就是如此,所以自然就不存在亮度等级一说,只有亮和灭两种亮度等级。
⚫ max_brightness:该属性文件只能被读取,不能写,用于获取LED 设备的最大亮度等级。
⚫ trigger:触发模式,该属性文件可读可写,读表示获取LED 当前的触发模式,写表示设置LED 的触发模式。不同的触发模式其触发条件不同,LED 设备会根据不同的触发条件自动控制其亮、灭状态,通过cat 命令查看该属性文件,可获取LED 支持的所有触发模式以及LED 当前被设置的触发模式:

方括号([heartbeat])括起来的表示当前LED 对应的触发模式,none 表示无触发,常用的触发模式包括
none(无触发)、mmc0(当对mmc0 设备发起读写操作的时候LED 会闪烁)、timer(LED 会有规律的一亮一灭,被定时器控制住)、heartbeat(心跳呼吸模式,LED 模仿人的心跳呼吸那样亮灭变化)。
通常系统启动之后,会将板子上的一颗LED 设置为heartbeat 触发模式,将其作为系统正常运行的指示灯,譬如ALPHA/Mini I.MX6U 开发板系统启动之后,底板上的用户LED 就会处于心跳呼吸模式,这个大家自己观察便可知道。
通过上面的介绍,已经知道如何去控制ALPHA/Mini I.MX6U 开发板底板上的用户LED 了,譬如通过
echo 命令进行控制:
echo timer > trigger //将LED 触发模式设置为timer
echo none > trigger //将LED 触发模式设置为none
echo 1 > brightness //点亮LED echo 0 > brightness//熄灭LED
大家可以自己动手使用echo 或cat 命令进行测试、控制LED 状态;除了使用echo 或cat 命令之后,同样我们编写应用程序,使用write()、read()函数对这些属性文件进行I/O 操作以达到控制LED 的效果。
Tips:命令cat 读取以及echo 写入到属性文件中的均是字符串,所以如果在应用程序中通过write()向属性文件写入数据,同样也要是字符串形式;同理,使用read()读取的数据也是字符串ASCII 编码的。
编写LED 应用程序
通过上一小节的介绍,我们已经知道了如何控制LED,接下来编写一个简单地示例代码演示如何控制
LED,测试代码如下所示:
本例程源码对应的路径为:开发板光盘->11、Linux C 应用编程例程源码->15_led->led.c。
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#define LED_TRIGGER "/sys/class/leds/sys-led/trigger"
#define LED_BRIGHTNESS "/sys/class/leds/sys-led/brightness"
#define USAGE() fprintf(stderr, "usage:\n" \" %s <on|off>\n" \" %s <trigger> <type>\n", argv[0], argv[0])
int main(int argc, char *argv[])
{int fd1, fd2;/* 校验传参*/if (2 > argc) {USAGE();exit(-1);}/* 打开文件*/fd1 = open(LED_TRIGGER, O_RDWR);if (0 > fd1) {perror("open error");exit(-1);}fd2 = open(LED_BRIGHTNESS, O_RDWR);if (0 > fd2) {perror("open error");exit(-1);}/* 根据传参控制LED */if (!strcmp(argv[1], "on")) {write(fd1, "none", 4); //先将触发模式设置为nonewrite(fd2, "1", 1); //点亮LED}else if (!strcmp(argv[1], "off")) {write(fd1, "none", 4); //先将触发模式设置为nonewrite(fd2, "0", 1); //LED 灭}else if (!strcmp(argv[1], "trigger")) {if (3 != argc) {USAGE();exit(-1);}if (0 > write(fd1, argv[2], strlen(argv[2])))perror("write error");}elseUSAGE();exit(0);
}
程序中定义了两个宏,LED_TRIGGER 和LED_BRIGHTNESS,分别对应/sys/class/leds/sys-led/trigger 和
/sys/class/leds/sys-led/brightness 属性文件,宏USAGE()用于打印程序的使用方法;程序首先会调用open()函数打开这两个属性文件,之后判断传入参数指向相应的动作,传入"on"表示点亮LED,先调用write()将"none"
写入到trigger 属性文件中,也就是设置为无触发,接着再向brightness 属性文件中写入"1"点亮LED;传入
"off"表示熄灭LED,同样也是先调用write()将"none"写入到trigger 属性文件设置LED 为无触发,接着再向
brightness 属性文件中写入"0"熄灭LED;传入"trigger"表示设置LED 的触发模式,则需要传入第二个参数,第二个参数表示需要设置的模式。
整个代码非常简单,接下来对测试代码进行编译,需要注意的时,由于我们是在ALPHA/Mini I.MX6U
开发板上运行程序,所以需要I.MX6U 平台对应的交叉编译工具来编译测试代码,这样编译得到的可执行文件才能在开发板上运行。
首先大家需要安装I.MX6U 硬件平台对应的交叉编译工具,如何安装呢?直接参考“开发板光盘资料
A-基础资料/【正点原子】I.MX6U 用户快速体验V1.7.3.pdf”文档中的第四章内容,根据文档的指示安装好交叉编译工具,当然如果你已经在Ubuntu 系统下安装过了,就不用再次安装了。
安装完成之后,在使用之前先对交叉编译工具的环境进行设置,使用source 执行安装目录下的
environment-setup-cortexa7hf-neon-poky-linux-gnueabi 脚本文件即可,如下所示:
source /opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
/opt/fsl-imx-x11/4.1.15-2.1.0 便是笔者在Ubuntu 系统下安装交叉编译工具时对应的安装目录,大家根据自己的情况设置正确的路径。处理完成之后,接下来我们便可以对示例代码15.3.1 进行编译了:
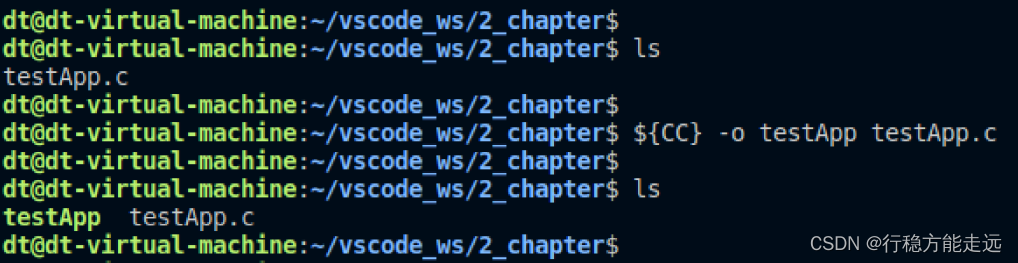
CC 变量其实就是交叉编译工具,如下所示:

所以CC 环境变量其实就是ARM 架构下的gcc 编译器—交叉编译工具arm-poky-linux-gnueabi-gcc,后面指定了一些选项,这些选项就不用管了;编译成功之后,会生成可在开发板上运行的可执行文件testApp,使用file 命令可以查看testApp 可执行文件的类型:
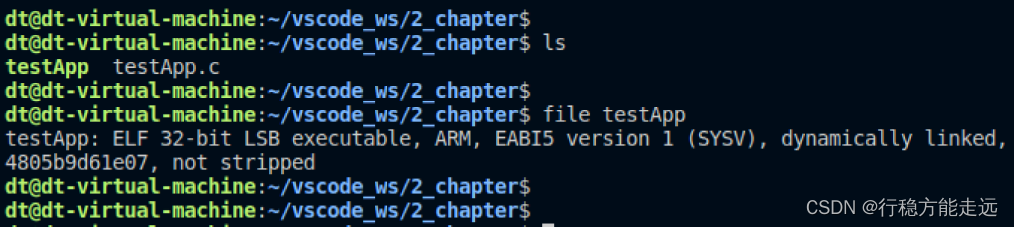
可以看出该文件是一个32 位ARM 架构下的可执行文件。
在开发板上测试
启动开发板进入Linux 系统,将上小节编译得到的可执行文件testApp 拷贝到开发板根文件系统中,譬如拷贝到开发板Linux 系统的家目录下,如下图所示:

拷贝方法很多,推荐大家使用scp 命令,这里就不再介绍了。
接下来执行testApp 程序测试:
./testApp on # 点亮LED
./testApp off # 熄灭LED
./testApp trigger heartbeat # 将LED 触发模式设置为heartbeat

查看LED 状态是否与程序执行的效果一致!
相关文章:
Linux系统点亮LED
目录应用层操控硬件的两种方式sysfs 文件系统sysfs 与/sys总结标准接口与非标准接口LED 硬件控制方式编写LED 应用程序在开发板上测试对于一款学习型开发板来说,永远都绕不开LED 这个小小的设备,基本上每块板子都至少会有一颗 LED 小灯,对于我…...
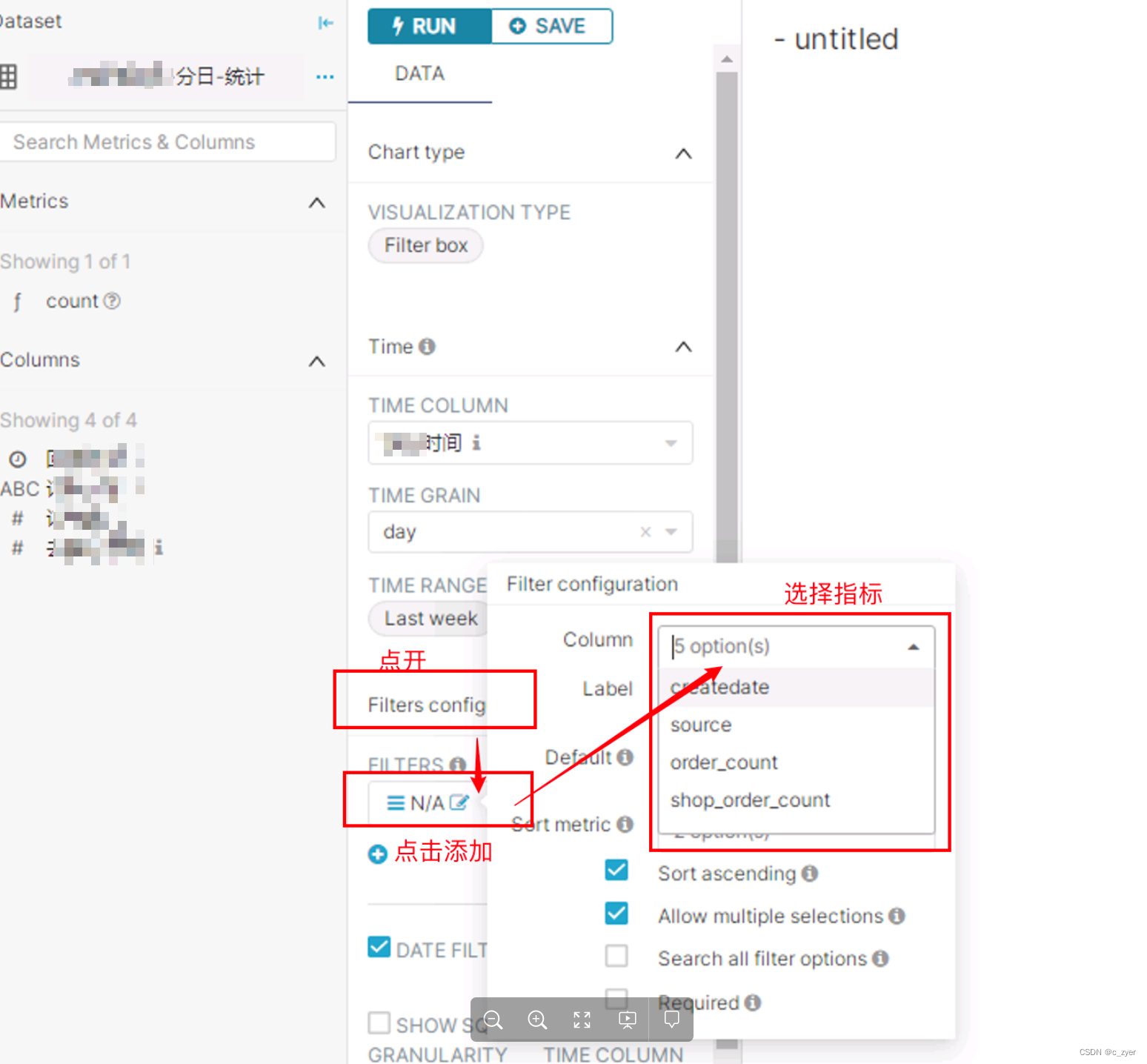
在superset中快速制作报表或仪表盘
在中小型企业,当下需要快速迭代、快速了解运营效果的业务,急需一款开源、好用、能快速迭代生产的报表系统。 老板很关心,BI工程师很关心,同时系统开发人员也同样关心,一个好的技术选型往往能够帮助公司减少很多成本&a…...
【可视化实战】Python 绘制出来的数据大屏真的太惊艳了
今天我们在进行一个Python数据可视化的实战练习,用到的模块叫做Panel,我们通过调用此模块来绘制动态可交互的图表以及数据大屏的制作。 而本地需要用到的数据集,可在kaggle上面获取 https://www.kaggle.com/datasets/rtatman/188-million-us…...
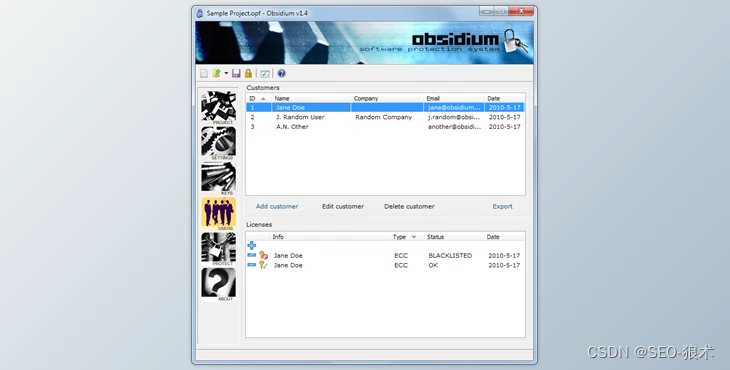
Obsidium一键编码作业,Obsidia惊人属性
Obsidium一键编码作业,Obsidia惊人属性 每个区域都包含几个可定制的功能,允许用户确定如何完全执行应用程序的安全性。Obsidia的功能区允许用户存储任何调整或一键编码作业。 Obsidia惊人属性: 代码虚拟化:代码虚拟化允许您转换程序代码的特定…...
约束优化:约束优化的三种序列无约束优化方法
文章目录约束优化:约束优化的三种序列无约束优化方法外点罚函数法L2-罚函数法:非精确算法对于等式约束对于不等式约束L1-罚函数法:精确算法内点罚函数法:障碍函数法等式约束优化问题的拉格朗日函数法:Uzawas Method fo…...
RocketMQ快速入门:消息发送、延迟消息、消费重试
一起学编程,让生活更随和! 如果你觉得是个同道中人,欢迎关注博主gzh:【随和的皮蛋桑】。 专注于Java基础、进阶、面试以及计算机基础知识分享🐳。偶尔认知思考、日常水文🐌。 目录1、RocketMQ消息结构1.1…...
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例 在通信IO点位数量足够的情况下,可以使用机器人的IO点传输位置数据,这里以传输机器人的实时位置为例进行说明。 基本流程如下图所示: 基本步骤可参考如下: 首先确认机器人控制柜已经安装了总线通信软件(例如…...

[蓝桥杯 2015 省 B] 移动距离
蓝桥杯 2015 年省赛 B 组 H 题题目描述X 星球居民小区的楼房全是一样的,并且按矩阵样式排列。其楼房的编号为 1,2,3,⋯ 。当排满一行时,从下一行相邻的楼往反方向排号。比如:当小区排号宽度为 6 时,开始情形如下:我们的…...
Pandas库入门仅需10分钟
数据处理的时候经常性需要整理出表格,在这里介绍pandas常见使用,目录如下: 数据结构导入导出文件对数据进行操作 – 增加数据(创建数据) – 删除数据 – 改动数据 – 查找数据 – 常用操作(转置࿰…...

python的socket通信中,如何设置可以让两台主机通过外网访问?
要让两台主机通过外网进行Socket通信,需要在网络设置和代码实现两个方面进行相应的配置。下面是具体的步骤: 确认网络环境:首先要确保两台主机都能够通过外网访问。可以通过ping命令或者telnet命令来测试两台主机之间是否可以互相访问。 确定…...
)
检测数据的方法(回顾)
检测数据类型的4种方法typeofinstanceofconstructor{}.toString.call() 检测数据类型的4种方法 typeof 定义 用来检测数据类型的运算符 返回一个字符串,表示操作值的数据类型(7种) number,string,boolean,object,u…...
比特数据结构与算法(第三章_上)栈的概念和实现(力扣:20. 有效的括号)
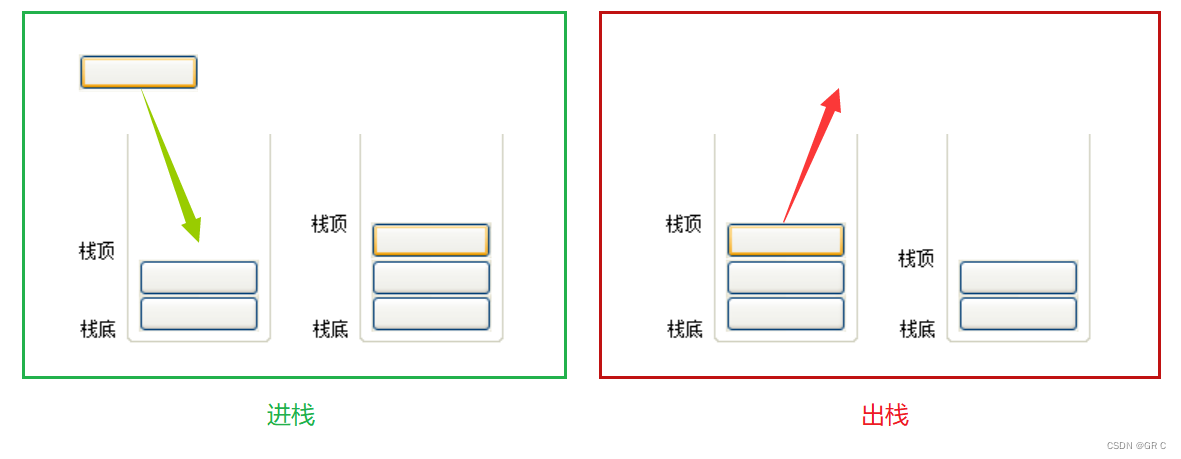
一、栈(stack)栈的概念:① 栈是一种特殊的线性表,它只允许在固定的一端进行插入和删除元素的操作。② 进行数据插入的删除和操作的一端,称为栈顶 。另一端则称为 栈底 。③ 栈中的元素遵守后进先出的原则,即…...
JVM13 类的生命周期
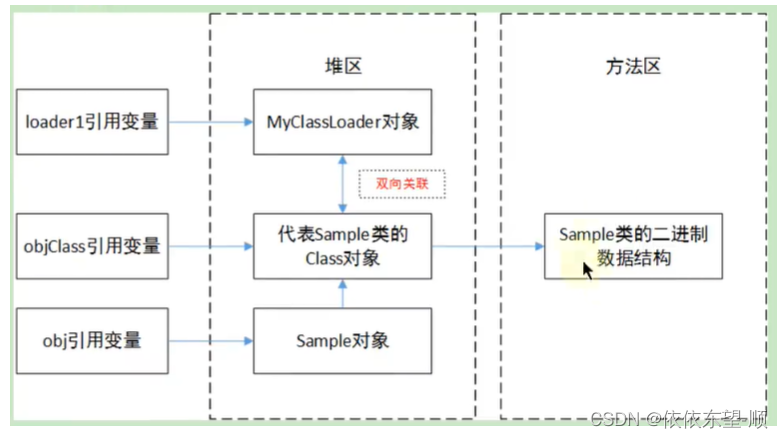
1. 概述 在 Java 中数据类型分为基本数据类型和引用数据类型。基本数据类型由虚拟机预先定义,引用数据类型则需要进行类的加载。 按照 Java 虚拟机规范,从 class 文件到加载到内存中的类,到类卸载出内存为止,它的整个生命周期包…...
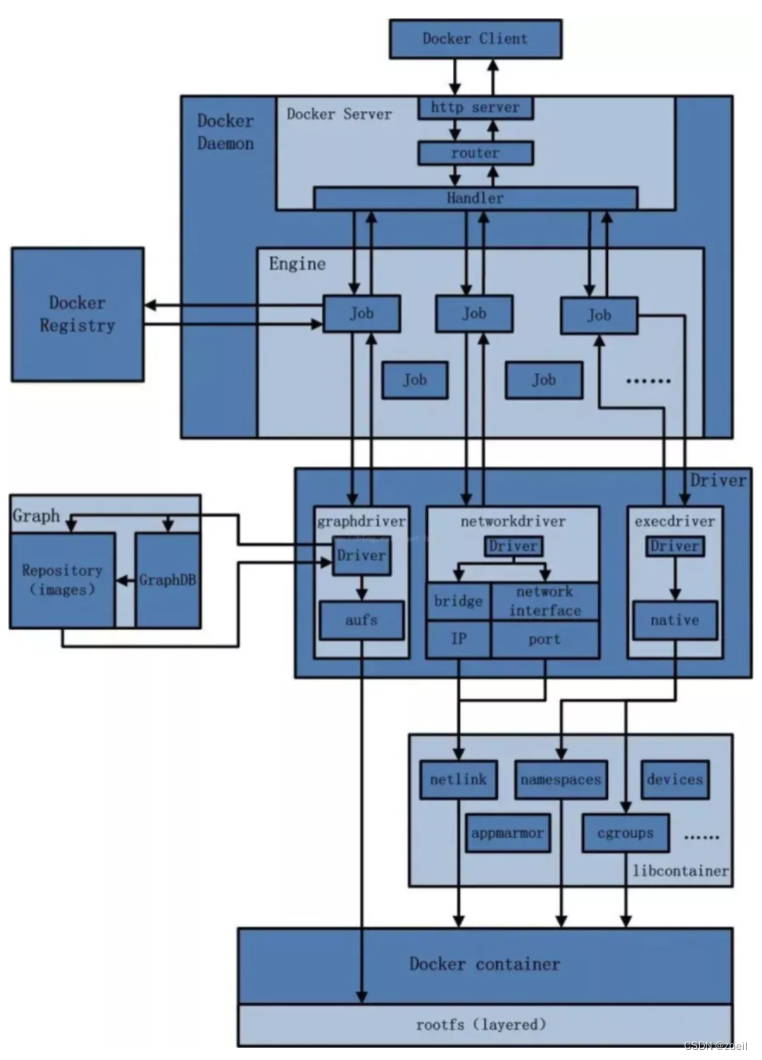
Docker网络模式解析
目录 前言 一、常用基本命令 (一)查看网络 (二)创建网络 (三)查看网络源数据 (四)删除网络 二、网络模式 (一)总体介绍 (二)…...

游山城重庆
山城楼梯多,路都是上坡。 为了赶早上8点从成都到重庆的动车,凌晨5点半就爬起床来,由于昨天喝了咖啡,所以我将尽3点才睡觉,这意味着我只睡了2个多小时。起来简单休息之后,和朋友协商好时间就一起出门了。 …...

Vuex的创建和简单使用
Vuex 1.简介 1.1简介 1.框框里面才是Vuex state:状态数据action:处理异步mutations:处理同步,视图可以同步进行渲染1.2项目创建 1.vue create 名称 2.运行后 3.下载vuex。采用的是基于vue2的版本。 npm install vuex3 --save 4.vu…...

Arduino IDE搭建Heltec开发板开发环境
Arduino IDE搭建Heltec开发板开发环境Heltec开发板开发环境下载与搭建Arduino IDE下载与安装搭建Heltec开发板的开发环境添加package URL方法通过Git的方法安装离线安装Heltec开发板开发环境下载与搭建 Arduino IDE下载与安装 Heltec的ESP系列和大部分的LoRa系列开发板都是用A…...

Using the GNU Compiler Collection 目录翻译
文章目录Introduction1 Programming Languages Supported by GCC2 Language Standards Supported by GCC2.1 C Language3 GCC Command Options3.1 Option Summary4 C Implementation-Defined Behavior6 Extensions to the C Language Family9 Binary Compatibility其他工具10 g…...

使用 OpenCV for Android 进行图像特征检测
android 开发人员,可能熟悉使用activities, fragments, intents以及最重要的一系列开源依赖库。但是,注入需要本机功能的依赖关系(如计算机视觉框架)并不像在 gradle 文件中直接添加实现语句那样简单!今天,将专注于使用 OpenCV 库…...
chatGPT笔记
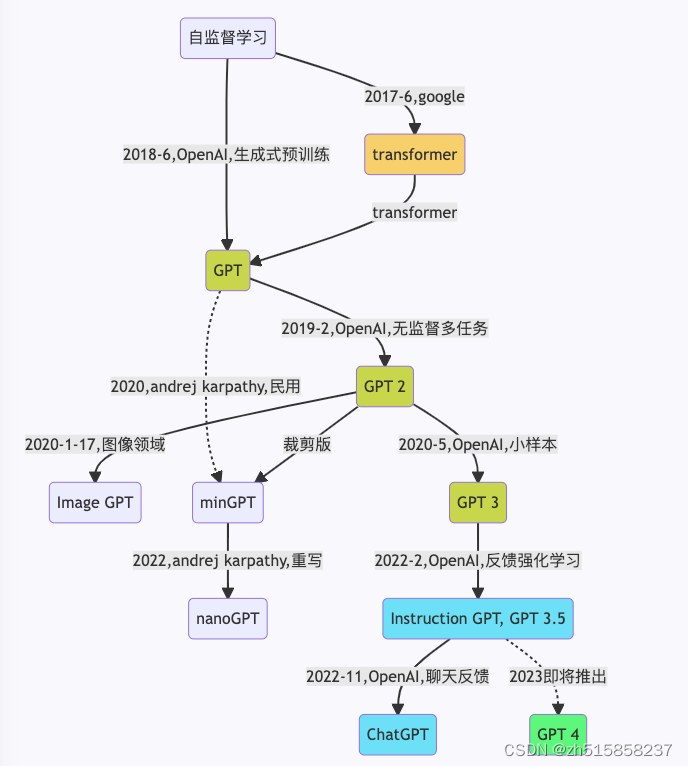
文章目录 一、GPT之技术演进时间线二、chatGPT中的语言模型instructGPT跟传统语言LM模型最大不同点是什么?三、instructGPT跟GPT-3的网络结构是否一样四、GPT和BERT有啥区别五、chatGPT的训练过程是怎样的?六、GPT3在算数方面的能力七、GPT相比于bert的优点是什么八、元学习(…...

反向传播:责任追溯大法——梯度如何“回流“
反向传播:责任追溯大法——梯度如何"回流"(Version B) 📚 《从零到一造大脑:AI架构入门之旅》专栏 专栏定位:面向中学生、大学生和 AI 初学者的科普专栏,用大白话和生活化比喻带你从零理解人工智能 本系列共 42 篇,分为八大模块: 📖 模块一【AI 基础概念…...

OpenClaw调试技巧:Qwen3.5-9B任务失败的回溯与日志分析
OpenClaw调试技巧:Qwen3.5-9B任务失败的回溯与日志分析 1. 为什么需要系统化的调试方法 上周我让OpenClaw帮我整理桌面上的100多份PDF文件,结果它把所有的会议纪要都归类到了"技术文档"文件夹。这个看似简单的任务背后,暴露了自动…...

NXOpen 遍历部件并对每个部件加属性
NXOpen 遍历部件并对每个部件加属性 // Mandatory UF Includes #include <uf.h> #include <uf_object_types.h> // Internal Includes #include <NXOpen/ListingWindow.hxx> #include <NXOpen/NXMessageBox.hxx> #include <NXOpen/UI.hxx> //…...

nix 项目贡献指南:从代码提交到发布的完整流程
nix 项目贡献指南:从代码提交到发布的完整流程 【免费下载链接】nix Rust friendly bindings to *nix APIs 项目地址: https://gitcode.com/gh_mirrors/nix/nix nix 是一个为 Rust 开发者提供友好的 *nix 系统 API 绑定的开源项目。本指南将带你了解从发现问…...

如何解决Cats类型推导难题:SI-2712修复与部分统一完整指南
如何解决Cats类型推导难题:SI-2712修复与部分统一完整指南 【免费下载链接】cats Lightweight, modular, and extensible library for functional programming. 项目地址: https://gitcode.com/gh_mirrors/ca/cats Cats是一个轻量级、模块化且可扩展的函数式…...

OpenClaw+Phi-3-mini-128k-instruct:自动化代码审查系统
OpenClawPhi-3-mini-128k-instruct:自动化代码审查系统 1. 为什么需要个人级代码审查助手 作为独立开发者,我经常陷入这样的困境:在GitHub上提交PR后,要么苦等同事review,要么自己反复检查代码质量。传统CI工具只能做…...

像素语言·跨维传送门参数详解:Hunyuan-MT-7B引擎温度/长度/对齐策略调优指南
像素语言跨维传送门参数详解:Hunyuan-MT-7B引擎温度/长度/对齐策略调优指南 1. 工具概览与核心价值 像素语言跨维传送门(Pixel Language Portal)是基于Tencent Hunyuan-MT-7B引擎构建的创新翻译工具,它将传统翻译体验重构为16-bit像素冒险风格。不同于…...
)
【2024大厂AI基础设施面试压轴题】:手写Cuvil自定义Op注册+自动融合Pass(附可运行验证代码)
第一章:Cuvil 编译器在 Python AI 推理中的应用 面试题汇总Cuvil 是一款面向 AI 推理场景的轻量级领域专用编译器(DSL Compiler),专为优化 Python 中基于 PyTorch/TensorFlow 模型的部署而设计。它通过静态图重写、算子融合与硬件…...

SDMatte+在影视后期应用:绿幕替代方案探索、道具透明化处理与VFX资产快速提取
SDMatte在影视后期应用:绿幕替代方案探索、道具透明化处理与VFX资产快速提取 1. 影视后期中的抠图挑战 在影视后期制作中,高质量的抠图技术是视觉特效(VFX)的基础。传统绿幕拍摄虽然成熟,但存在诸多限制: 需要专门的拍摄场地和…...

LTE CDRX配置优化与日志解析实战
1. LTE CDRX功能基础与核心参数解析 CDRX(Connected Mode DRX)是LTE网络中终端设备在连接状态下实现节能的关键技术。想象一下你的手机就像个熬夜加班的程序员,如果一直盯着电脑屏幕(持续监听网络信号),电量…...