06- OpenCV查找图像轮廓 (OpenCV基础) (机器视觉)
知识重点
- 灰度图转换: gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- 二值化: 返回两个东西,一个阈值, 一个是二值化的图: thresh, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
- 查找轮廓: 返回两个结果,分别是轮廓和层级: contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE )
- 描绘轮廓: cv2.drawContours(img_copy, contours, -1, (0, 0, 255), 2) 索引取-1时描绘所有轮廓.
- 轮廓面积计算: area = cv2.contourArea(contours[1]) # print('area: ', area)
- 轮廓周长计算: perimeter = cv2.arcLength(contours[1], closed = False) # perimeter 周长
- 多边形逼近: approx = cv2.approxPolyDP(contours[0], 6, closed = True)
- 凸包计算: hull = cv2.convexHull(contours[0]) 凸包指的是完全包含原有轮廓,并且仅由轮廓上的点所构成的多边形。
- 最小外接矩形: rect = cv2.minAreaRect(contours[1])
- box = cv2.boxPoints(rect)
- box = np.round(box).astype('int64') # 注意坐标必须是整数的, 所以需要转化一下
- cv2.drawContours(img, [box], 0, (255, 0, 0), 2)
-
最大外接矩形: x, y, w, h = cv2.boundingRect(contours[1]) # 最大外接矩形参数, (x,y), (w, h)
-
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)
-
-
外接圆: (a, b), radius = cv2.minEnclosingCircle(contours[1]) # , 返回圆的中心点和半径
-
cv2.circle(img, (int(a), int(b)), int(radius), (0, 255, 0), 2)
-
7. 图像轮廓
7.1 什么是图像轮廓
图像轮廓是具有相同颜色或灰度的连续点的曲线. 轮廓在形状分析和物体的检测和识别中很有用。
轮廓的作用:
-
用于图形分析
-
物体的识别和检测
注意点:
-
为了检测的准确性,需要先对图像进行二值化或Canny操作。
-
画轮廓时会修改输入的图像, 如果之后想继续使用原始图像,应该将原始图像储存到其他变量中。
7.2 查找轮廓
-
findContours(image, mode, method[, contours[, hierarchy[, offset]]])
-
mode 查找轮廓的模式
-
RETR_EXTERNAL = 0, 表示只检测外围轮廓
-
RETR_LIST = 1, 检测的轮廓不建立等级关系, 即检测所有轮廓, 较为常用
-
RETR_CCOMP = 2, 每层最多两级, 从小到大, 从里到外.
-
RETR_TREE = 3, 按照树型存储轮廓, 从大到小, 从右到左.
-
-
import cv2
import numpy as np# 显示黑白,实际为彩图
img = cv2.imread('./contours1.jpeg')
# 先变成单通道的黑白图片
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化,返回两个东西,一个阈值, 一个是二值化的图
thresh, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)# 查找轮廓,新版本返回两个结果,分别是轮廓和层级
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# 画轮廓是会直接修改原图,如果保证原图不变,建议先拷贝
img_copy = img.copy()
cv2.drawContours(img_copy, contours, -1, (0, 0, 255), 2) # 索引轮廓cv2.imshow('img', img)
cv2.imshow('img_copy', img_copy)
cv2.waitKey(0)
cv2.destroyAllWindows()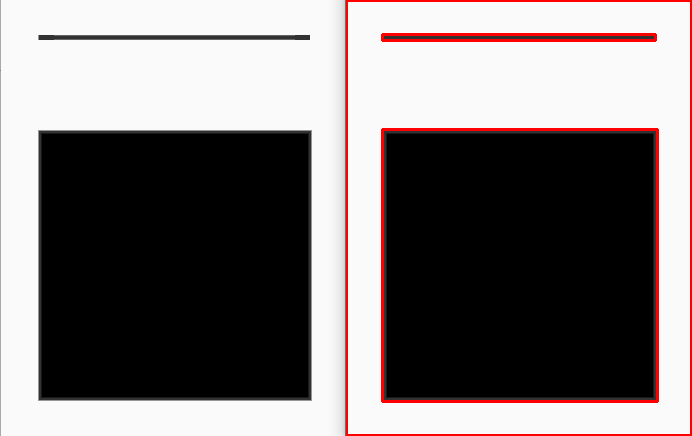
- method 轮廓近似方法也叫 ApproximationMode
-
CHAIN_APPROX_NONE 保存所有轮廓上的点
-
CHAIN_APPROX_SIMPLE, 只保存角点, 比如四边形, 只保留四边形的4个角, 存储信息少, 比较常用
-
-
返回 contours和hierachy 即轮廓和层级
7.3 绘制轮廓
-
drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset]]]]])
-
image 要绘制的轮廓图像
-
contours轮廓点
-
contourIdx 要绘制的轮廓的编号. -1 表示绘制所有轮廓
-
color 轮廓的颜色, 如 (0, 0, 255)表示红色
-
thickness 线宽, -1 表示全部填充
-
import cv2
import numpy as np# 显示黑白,实际为彩图
img = cv2.imread('./contours1.jpeg')
# 先变成单通道的黑白图片
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 二值化,返回两个东西,一个阈值, 一个是二值化的图
thresh, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)# 查找轮廓,新版本返回两个结果,分别是轮廓和层级
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)# 画轮廓是会直接修改原图,如果保证原图不变,建议先拷贝
img_copy = img.copy()
cv2.drawContours(img_copy, contours, 1, (0, 0, 255), 2) # 看1#的轮廓cv2.imshow('img', img)
cv2.imshow('img_copy', img_copy)
cv2.waitKey(0)
cv2.destroyAllWindows()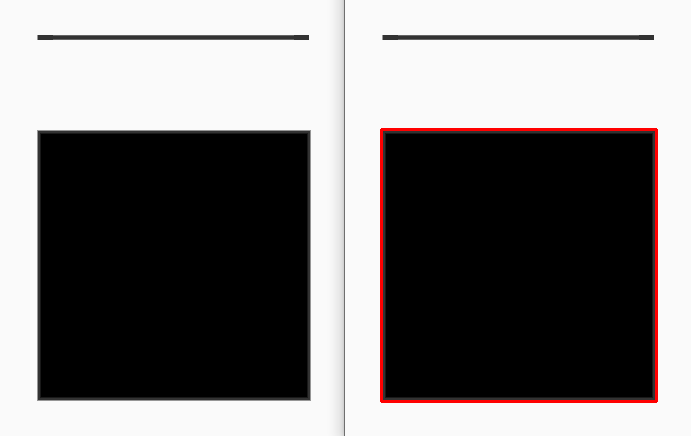
7.4 轮廓的面积和周长
轮廓面积是指每个轮廓中所有的像素点围成区域的面积,单位为像素。
轮廓面积是轮廓重要的统计特性之一,通过轮廓面积的大小可以进一步分析每个轮廓隐含的信息,例如通过轮廓面积区分物体大小识别不同的物体。在查找到轮廓后, 可能会有很多细小的轮廓, 我们可以通过轮廓的面积进行过滤.
-
contourArea(contour)
-
arcLength(curve, closed)
-
curve即轮廓
-
closed是否是闭合的轮廓
-
import cv2
import numpy as np# 显示黑白,实际为彩图
img = cv2.imread('./contours1.jpeg')# 先变成单通道的黑白图片
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化,返回两个东西,一个阈值, 一个是二值化的图
thresh, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# 查找轮廓,新版本返回两个结果,分别是轮廓和层级
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)# 画轮廓是会直接修改原图,如果保证原图不变,建议先拷贝
img_copy = img.copy()
cv2.drawContours(img_copy, contours, 1, (0, 0, 255), 2) # 索引轮廓# 计算轮廓面积
area = cv2.contourArea(contours[1])
print('area: ', area) # area: 74798.0
# 计算轮廓周长
perimeter = cv2.arcLength(contours[1], closed = False)
print('perimeter: ',perimeter) # perimeter: 821.656cv2.imshow('img', img)
cv2.imshow('img_copy', img_copy)
cv2.waitKey(0)
cv2.destroyAllWindows()
7.5 多边形逼近与凸包
findContours后的轮廓信息contours可能过于复杂不平滑,可以用approxPolyDP函数对该多边形曲线做适当近似,这就是轮廓的多边形逼近.apporxPolyDP就是以多边形去逼近轮廓,采用的是Douglas-Peucker算法(方法名中的DP),DP算法原理比较简单,核心就是不断找多边形最远的点加入形成新的多边形,直到最短距离小于指定的精度。
-
approxPolyDP(curve, epsilon, closed[, approxCurve])
-
curve 要近似逼近的轮廓
-
epsilon 即DP算法使用的阈值
-
closed 轮廓是否闭合
-
import cv2
import numpy as np# 显示黑白,实际为彩图
img = cv2.imread('./hand.png')
# print(img.shape)
# 先变成单通道的黑白图片
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 二值化,返回两个东西,一个阈值, 一个是二值化的图
thresh, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# 查找轮廓,新版本返回两个结果,分别是轮廓和层级
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)# 画轮廓是会直接修改原图,如果保证原图不变,建议先拷贝
img_copy = img.copy()
cv2.drawContours(img_copy, contours, 0, (0, 0, 255), 2) # 索引轮廓# 使用多边形逼近,近似模拟多边形的轮廓
approx = cv2.approxPolyDP(contours[0], 6, closed = True)
# approx 本质是一个类型的轮廓
# 画出多边形逼近的轮廓
cv2.drawContours(img_copy, [approx], 0, (0, 255, 0), 2) cv2.imshow('img_copy', img_copy)
cv2.waitKey(0)
cv2.destroyAllWindows()
逼近多边形是轮廓的高度近似,但是有时候,我们希望使用一个多边形的凸包来简化它。凸包跟逼近多边形很像,只不过它是物体最外层的凸多边形。凸包指的是完全包含原有轮廓,并且仅由轮廓上的点所构成的多边形。凸包的每一处都是凸的,即在凸包内连接任意两点的直线都在凸包的内部。在凸包内,任意连续三个点的内角小于180°。
-
convexHull(points[, hull[, clockwise[, returnPoints]]])
-
points 即轮廓
-
colckwise 顺时针绘制
-
import cv2
import numpy as npimg = cv2.imread('./hand.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
therth, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
# 查找轮廓
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
cv2.drawContours(img, contours, 0, (0, 0, 255), 2)# 计算凸包
hull = cv2.convexHull(contours[0])
# 画出凸包
cv2.drawContours(img, [hull], 0, (255, 0, 0), 2)cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()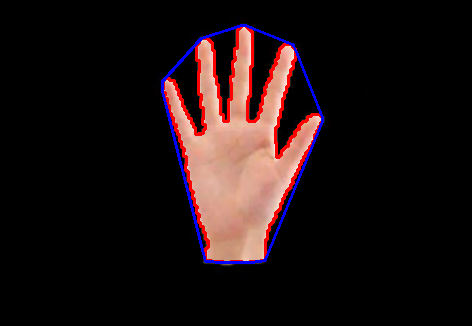
7.6 外接矩形及外接圆
外接矩形分为最小外接矩形和最大外接矩形.
下图中红色矩形是最小外接矩形, 绿色矩形为最大外接矩形.
-
minAreaRect(points) 最小外接矩阵
-
points 即为轮廓
-
返回元组, 内容是一个旋转矩形(RotatedRect)的参数: 矩形的起始坐标x,y, 矩形的宽度和高度, 矩形的选择角度.
-
-
boundingRect(points) 最大外接矩阵
-
points 即为轮廓a
-
-
cv2.minEnclosingCircle(points) 最小外接圆
import cv2
import numpy as npimg =cv2.imread('./hello.jpeg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
thersh, binary = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)# rect是一个Rotated Rect 旋转的矩形, 矩形的起始坐标(x,y), 矩形的长宽, 矩形旋转角度
rect = cv2.minAreaRect(contours[1])
# 其实就是帮我们把旋转矩阵的4个坐标点计算出来了.
# 注意坐标必须是整数的, 所以需要转化一下
box = cv2.boxPoints(rect)
# 四舍五入
box = np.round(box).astype('int64')
# 绘制最小外接矩形
cv2.drawContours(img, [box], 0, (255, 0, 0), 2)# 最大外接矩形, 返回最大外接矩形的参数, (x,y), (w, h)
x, y, w, h = cv2.boundingRect(contours[1])
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)# 外接圆, 返回圆的中心点和半径
(a, b), radius = cv2.minEnclosingCircle(contours[1])
# 画出圆
cv2.circle(img, (int(a), int(b)), int(radius), (0, 255, 0), 2)cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()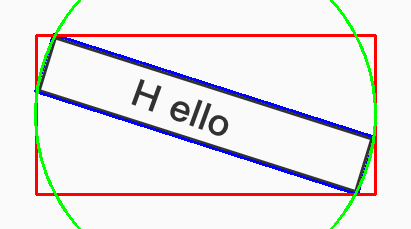
相关文章:
06- OpenCV查找图像轮廓 (OpenCV基础) (机器视觉)
知识重点 灰度图转换: gray cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)二值化: 返回两个东西,一个阈值, 一个是二值化的图: thresh, binary cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)查找轮廓: 返回两个结果,分别是轮廓和层级: c…...
OpenGL学习日记之模型绘制
自己编译运行过程中遇到的一些问题 下载Assimp已编译的lib(因为我们公司的电脑有很多权限和限制,也不能自己安装一些没有报备的软件,所以愁方便我就没有用cMake自己编译了)找到一位免费分享的博主的。 https://blog.csdn.net/lady_killer9/article/deta…...
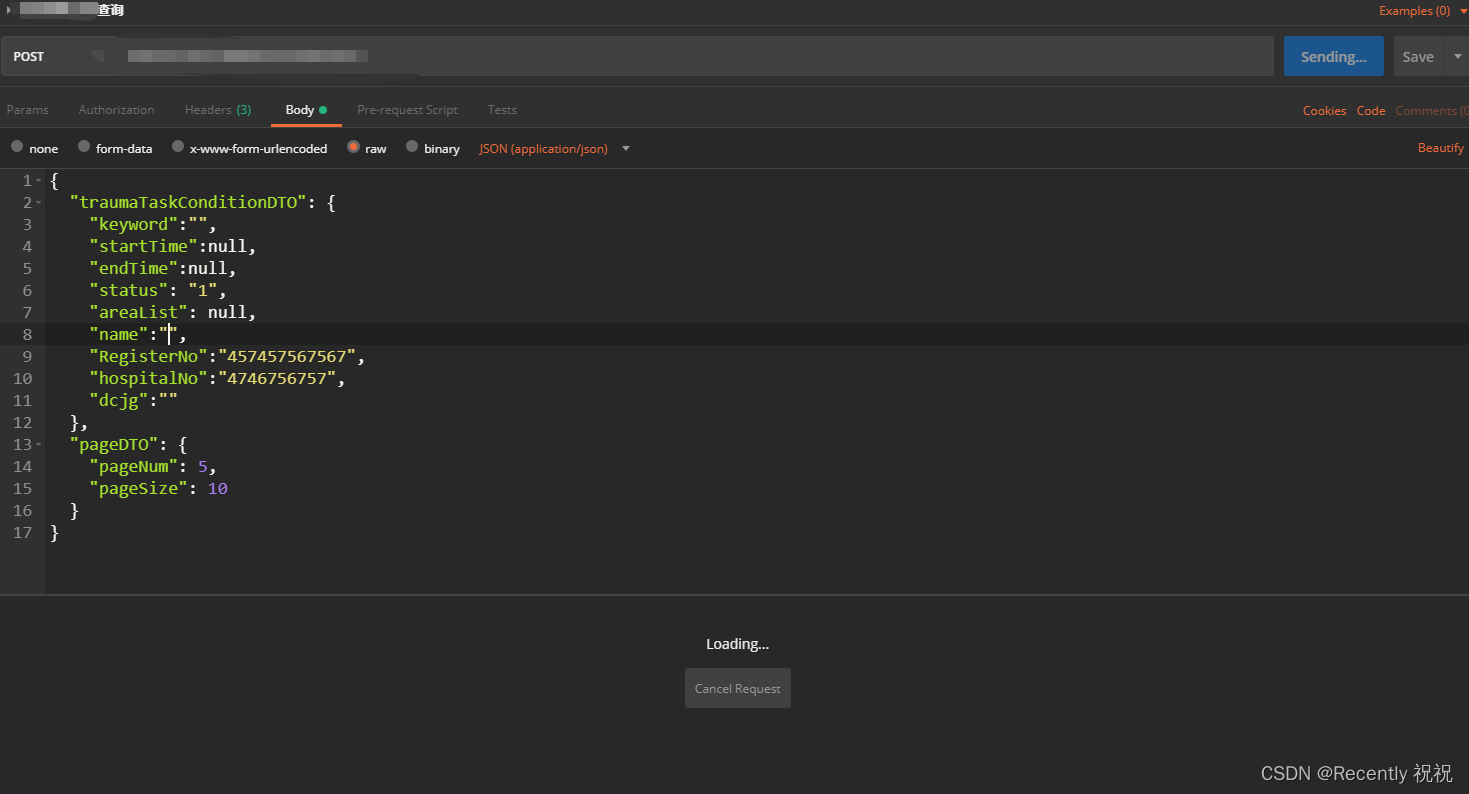
Springboot接口多个DTO入参的Postman上传方式
在Java中使用Spring Boot框架时,可以同时使用多个DTO作为方法参数。 TO(Data Transfer Object)是一个常见的设计模式,用于封装数据传输对象。它通常用于将数据从一个层传递到另一个层,例如将数据从服务层传递到控制器…...

软考各科目考核内容详细介绍,看这里
新手在准备报考软考时,都会遇到这样的一个问题——科目这么多,我适合考什么?要想知道自己适合报什么科目,就需要了解每个科目是什么,考什么等一系列的问题。 接下来,就为大家介绍一下软考的各个科目&#…...
连续时间信号与离散时间信号
前言 《信号与系统》是一门很难的课,也是许多学校考研要考的专业课,由于每周只有两节课,所以每次上完都要及时的去复习,这里参考的教材是奥本海姆著作,刘海棠译,北京:电子工业出版社࿰…...
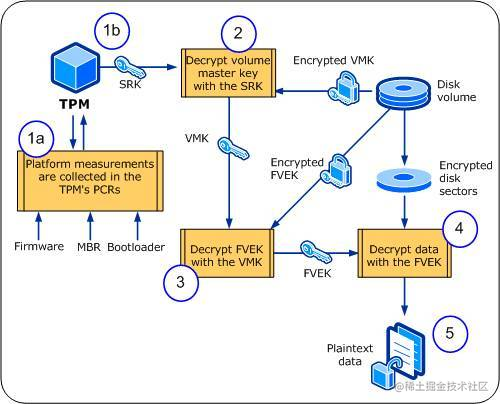
TPM密钥管理、使用
前面讲过证书相关内容,除了在软件方面有所应用外,在硬件方面也有很多应用。本次讲一下TPM相关的内容。 一、TPM介绍 1.1背景 TCG基于硬件安全的架构是为应对1990s后期日益增多的复杂恶意软件攻击应用而生的。当时以及现在,抵御PC客户端网络…...
return和finally执行顺序、运行时异常与一般异常异同、error和exception区别、Java异常处理机制原理与应用
文章目录1.try {}里有一个return语句,那么紧跟在这个try后的finally{}里的code会不会被执行,什么时候被执行,在return前还是后?2.运行时异常与一般异常有何异同?3.java 程序中的错误有三种类型分别是什么4.error和exception有什么…...
我为什么放弃WinUI3
基于WinUI3开发HiNote已经有一个多月的时间了,算是做出来一个简单能用的C端软件。 基于个人的经历,说说其中的开发体验。 UI设计语言 无论是否抄袭苹果,WinUI3给人的感觉都是眼前一亮的。简洁美观,现代化,毛玻璃的美…...

2023年全国最新安全员精选真题及答案2
百分百题库提供安全员考试试题、建筑安全员考试预测题、建筑安全员ABC考试真题、安全员证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 21.(单选题)静作用压路机在施工过程,要求实际含水量…...
计算机408考研先导课---C语言难点
以下为小编在重温C语言时,容易犯错的一些点,希望列出来对大家有一定帮助! 一、整型变量数的范围 类型说明符长度(字节)数的范围int4/2(有些为4字节,有些为2字节)-32768~32767short2…...

K8S 部署 Redis-Cluster 集群
本文使用 bitnami 镜像部署 redis-cluster 官方文档:https://github.com/bitnami/charts/tree/main/bitnami/redis-cluster 添加 bitnami 仓库 helm repo add bitnami https://charts.bitnami.com/bitnami自定义 values.yaml storageClass:集群的存储…...

[oeasy]python0089_大型机的衰落_Dec小型机崛起_PDP_VAX网络
编码进化 回忆上次内容 上次 回顾了 计算机存储单位的演变 最小的读写单位 是 bit 8-bit 固定下来 成为了字节(Byte) 位数容量8-bit1Byte1024Byte1 KB1024 KB1 MB1024 MB1 GB1024 GB1 TB 存储字符时 第1位 是 标志位后7位 是 ascii具体的值 可以用 1Byte 存储 计算机之间 …...
Apache Shiro与Spring Security对比
Apache Shiro VS Spring Security 1.Spring Security 官方文档:https://spring.io/projects/spring-security#overview介绍: Spring Security是一个能够为基于Spring的企业应用系统提供声明式的安全访问控制解决方案的安全框架。它提供了一组可以在Spr…...

23春招-mysql事务相关高频面试题
1、什么是事务 对于一个事务,要么事务内的sql全部执行,要么都不执行 2、 事务的特性ACID 原子性 整个事务中所有的操作要么全部提交成功,要么全部失败会滚。 一致性 数据库总是从一个一致性状态转换到另一个一致性状态。假如有三个sql语句…...

天线理论知识1——基础概念介绍
基础概念介绍 文章目录 基础概念介绍前言一、主要参数二、天线的种类三、天线的测量前言 天线是用于发射和接收电磁波设备。其功能可以概括为转换自由空间中的电磁波和设备中的导行波。 一、主要参数 天线设计中要考虑的参数较多,包括 方向性函数:距离天线 r r r处的远区…...

【云原生之Docker实战】使用Docker部署StackEdit在线Markdown编辑器
【云原生之Docker实战】使用Docker部署StackEdit在线Markdown编辑器 一、StackEdit介绍1.StackEdit简介2.StackEdit中文版简介3.StackEdit中文版功能二、检查本地Docker环境1.检查系统版本2.检查系统Docker版本3.检查docker compose版本三、下载StackEdit镜像四、部署StackEdit…...
特征工程:特征构造以及时间序列特征构造
数据和特征决定了机器学习的上限,而模型和算法只是逼近这个上限而已。由此可见,特征工程在机器学习中占有相当重要的地位。在实际应用当中,可以说特征工程是机器学习成功的关键。 那特征工程是什么? 特征工程是利用数据领域的相关…...

单master部署简要步骤
准备多台服务器,选定一台为master例如设置ip为192.168.0.10,host: k8s.master,其他分别为 k8s.s11 192.168.0.11k8s.s12 192.168.0.12....hostname可以使用命令配置hostname k8s.masterip解析可以在hosts文件中写入,如果有内部dns解析可以在内…...
基础算法 --- 前缀和与差分)
【算法基础】(一)基础算法 --- 前缀和与差分
✨个人主页:bit me ✨当前专栏:算法基础 🔥专栏简介:该专栏主要更新一些基础算法题,有参加蓝桥杯等算法题竞赛或者正在刷题的铁汁们可以关注一下,互相监督打卡学习 🌹 🌹 dz…...

c++提高篇——stack容器
一、stack容器的基本概念 stack是一种先进后出(FILO)的数据结构,它只有一个出口。栈中只有顶端的元素才可以被外界使用。因此该容器不能有遍历行为。基本的结构如下: stack容器有些像手枪子弹的弹夹,其数据的出入栈可以以弹夹为参考。 二、…...

DeepSeek代码质量评估实战手册:7步完成从混沌到可度量的质变跃迁
更多请点击: https://kaifayun.com 第一章:DeepSeek代码质量评估的底层逻辑与核心价值 DeepSeek代码质量评估并非简单地统计行数或检测语法错误,而是基于多维语义理解构建的推理系统。其底层逻辑融合了静态分析、符号执行与大语言模型生成式…...

基于LM22678的树莓派硬盘专用电源设计:解决供电不稳与电流冲击
1. 项目概述:为什么我们需要一个“专用”电源?如果你正在用树莓派搭配一块机械硬盘搭建一个家庭服务器或者个人云存储,可能已经遇到了一个不大不小的麻烦:供电不稳。树莓派官方推荐的5V/3A电源,单独带树莓派4B跑满负载…...

从分立逻辑到单片机:基于ATmega8的MIDI通道分析仪设计与实现
1. 项目概述:从分立逻辑到单片机的MIDI通道分析仪进化史二十年前,当我在《Elektor》杂志上发表第一版MIDI通道分析仪时,整个数字音乐世界还处于一个相当“硬核”的阶段。那个版本的设计,用今天的话来说,简直就是一场“…...

2026 文章代码高亮方案选型
将基于 Prism.js 或 Highlight.js 的传统高亮方案与基于 Shiki 的现代化高亮方案进行对比,其核心区别在于底层解析原理的不同(正则表达式 vs. TextMate 语法树)。 以下是两种方案的底层原理、各自优缺点、核心对比矩阵以及适用场景的详细分析…...
:3类高危使用场景+2个监管红线预警)
Claude SWOT分析(内部风控文档流出版):3类高危使用场景+2个监管红线预警
更多请点击: https://intelliparadigm.com 第一章:Claude SWOT分析(内部风控文档流出版):3类高危使用场景2个监管红线预警 高危使用场景识别 在企业级AI应用中,Claude模型若未经严格风控适配,…...

LaTeX公式一键转Word:3步告别数学公式编辑烦恼
LaTeX公式一键转Word:3步告别数学公式编辑烦恼 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 还在为Word文档中的数学公式编辑而抓狂…...

DIY四路自动音频源切换器:从信号检测到继电器隔离的完整设计
1. 项目概述与核心需求解析作为一个喜欢在工作室里捣鼓各种音频设备的玩家,我经常遇到一个挺烦人的问题:我的功放只有一组输入,但我想接的设备却有好几个——台式电脑、平板、蓝牙接收模块,还有一台树莓派。每次想切换音源&#x…...

告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南
告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南第一次点击"打包项目"按钮时,进度条仿佛被冻结的场景,每个UE5开发者都经历过。尤其当项目规模达到数十GB时,等待时间可能超过一小时——这背后隐藏着引擎底…...

对比按量计费与Token Plan套餐的实际成本差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比按量计费与Token Plan套餐的实际成本差异 在构建和运营基于大模型的应用时,成本控制是一个核心的工程考量。Taotok…...

C语言预处理指令全解析
第六章 预处理命令在c语言中,所有# 开头的指令,被称为预处理指令。gcc 编译预处理 所有的预处理指令,都要在这步处理完汇编编译连接#include包含头文件。 全局变量的声明,函数的声明, 自定义构造类型声明, …...