ROS 2官方文档(基于humble版本)学习笔记(二)
ROS 2官方文档(基于humble版本)学习笔记(二)
- 理解节点(node)
- ros2 run
- ros2 node list
- 重映射(remap)
- ros2 node info
- 理解话题(topic)
- rqt_graph
- ros2 topic list
- ros2 topic echo
- ros2 topic info
- ros2 interface show
- ros2 topic pub
- ros2 topic hz
- Clean up
今天继续总结CLI 工具章的学习
理解节点(node)
ROS 2图是一个ROS 2元件同时处理数据的网络,如果将它们全部映射并可视化它们,则包括所有可执行文件以及它们之间的连接。
ROS中的每个节点(node)都应该只为了单个的、模块化的目的而设计的,例如控制车轮电动机或从激光测距仪发布传感器数据。每个节点都可以通过主题(topic),服务(service),动作(action)或参数(parameters)从其他节点发送和接收数据。在ROS 2中,一个可执行程序(c++或python程序)可以包含一个或多个节点(node)。
ros2 run
此命令启动一个包中的可执行程序:
ros2 run <package_name> <executable_name>
ros2 node list
此命令展示所有运行中的节点的名字。常用来查找你想要交互或跟踪的节点。
ros2 node list
重映射(remap)
此参数用来重新定义默认的节点属性(比如节点名,话题名,服务名)为用户指定的值。
ros2 node info
此命令用于获取节点更多信息。通常包括订阅消息者们(subscriber),发布消息者(publiser),服务(service)和动作(action)。
ros2 node info <node_name>
/turtlesim节点信息如下:
/turtlesimSubscribers:/parameter_events: rcl_interfaces/msg/ParameterEvent/turtle1/cmd_vel: geometry_msgs/msg/TwistPublishers:/parameter_events: rcl_interfaces/msg/ParameterEvent/rosout: rcl_interfaces/msg/Log/turtle1/color_sensor: turtlesim/msg/Color/turtle1/pose: turtlesim/msg/PoseService Servers:/clear: std_srvs/srv/Empty/kill: turtlesim/srv/Kill/reset: std_srvs/srv/Empty/spawn: turtlesim/srv/Spawn/turtle1/set_pen: turtlesim/srv/SetPen/turtle1/teleport_absolute: turtlesim/srv/TeleportAbsolute/turtle1/teleport_relative: turtlesim/srv/TeleportRelative/turtlesim/describe_parameters: rcl_interfaces/srv/DescribeParameters/turtlesim/get_parameter_types: rcl_interfaces/srv/GetParameterTypes/turtlesim/get_parameters: rcl_interfaces/srv/GetParameters/turtlesim/list_parameters: rcl_interfaces/srv/ListParameters/turtlesim/set_parameters: rcl_interfaces/srv/SetParameters/turtlesim/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomicallyService Clients:Action Servers:/turtle1/rotate_absolute: turtlesim/action/RotateAbsoluteAction Clients:/teleop_turtle节点信息如下:
/teleop_turtleSubscribers:/parameter_events: rcl_interfaces/msg/ParameterEventPublishers:/parameter_events: rcl_interfaces/msg/ParameterEvent/rosout: rcl_interfaces/msg/Log/turtle1/cmd_vel: geometry_msgs/msg/TwistService Servers:/teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters/teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes/teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters/teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters/teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters/teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomicallyService Clients:Action Servers:Action Clients:/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute理解话题(topic)
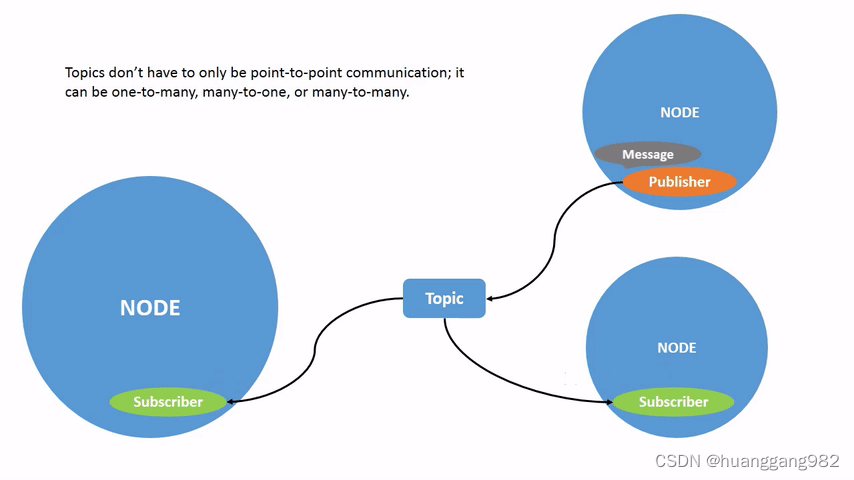
话题是ROS图的一个至关重要的元素,扮演着节点间用于交换信息的总线的角色。
rqt_graph
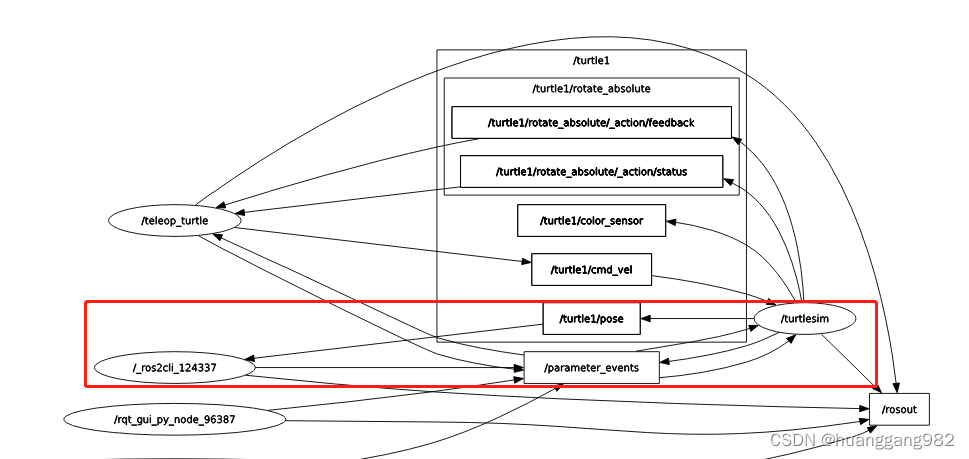
在一个终端执行rqt_graph或者执行rqt后选择菜单Plugins > Introspection > Node Graph
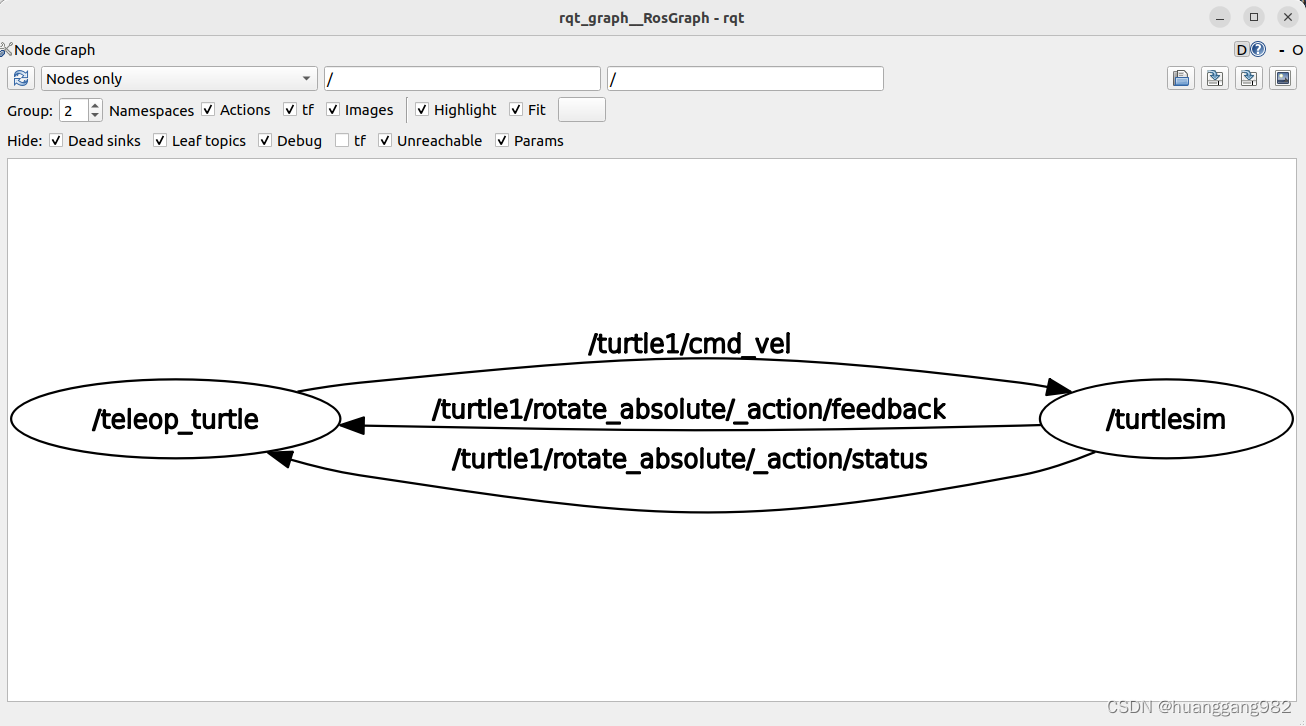
上图描述了/turtlesim节点和/teleop_turtle节点如何在一个话题上通信的。/teleop_turtle节点发布数据到/turtle1/cmd_vel话题,/turtlesim节点订阅这个话题来接收数据。
ros2 topic list
此命令用于显示当前活动的所有话题。加上-t参数会在[]中显示话题的类型。
hugo@vm-ubuntu1:~$ ros2 topic list -t
/parameter_events [rcl_interfaces/msg/ParameterEvent]
/rosout [rcl_interfaces/msg/Log]
/turtle1/cmd_vel [geometry_msgs/msg/Twist]
/turtle1/color_sensor [turtlesim/msg/Color]
/turtle1/pose [turtlesim/msg/Pose]ros2 topic echo
此命令用来查看正在被发布的话题数据。
如下图所示,刚开始没有输出任何数据,他在等待/teleop_turtle发布信息。在运行turtle_teleop_key的终端按键控制乌龟运动,这时echo的终端就会输出信息了。
ros2 topic echo <topic_name>

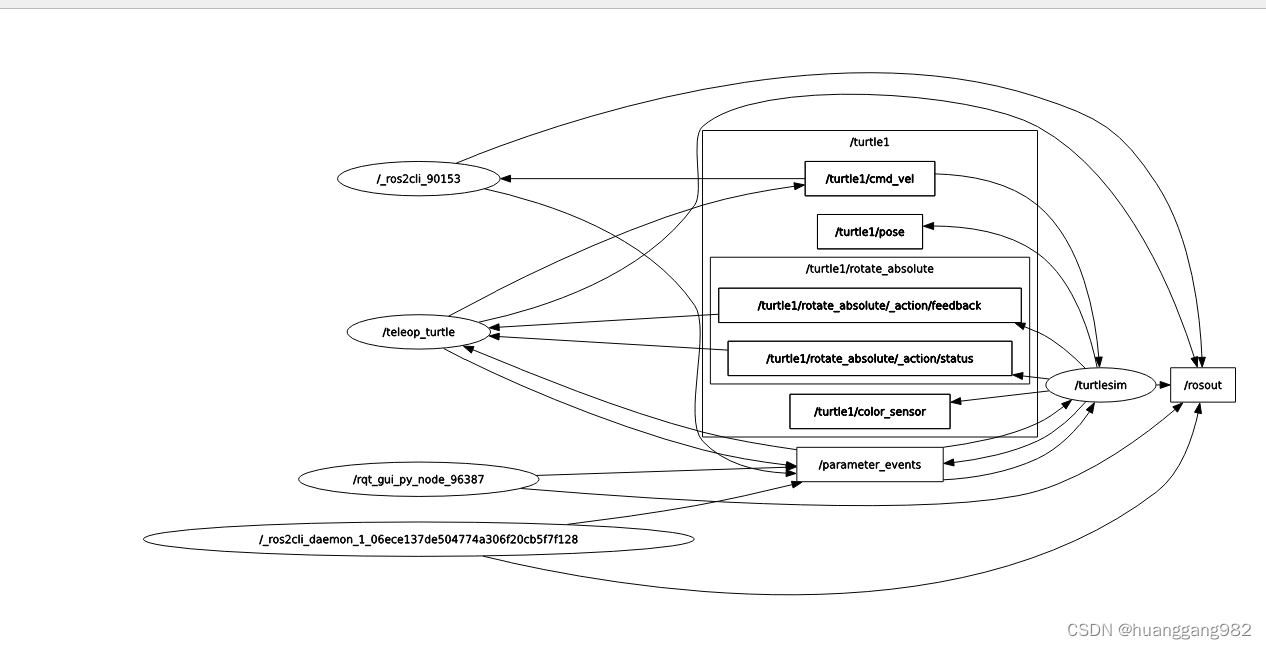
在rqt_graph界面去掉工具栏中Hide:Debug前面的勾,就可以看到以/_ros2cli_开头的一个节点就是刚才执行的echo命令。
ros2 topic info
此命令也可以显示话题的类型、订阅者数量和发布者数量。
hugo@vm-ubuntu1:~$ ros2 topic info /turtle1/cmd_vel
Type: geometry_msgs/msg/Twist
Publisher count: 1
Subscription count: 2ros2 interface show
此命令用于查看消息类型的具体定义。
hugo@vm-ubuntu1:~$ ros2 interface show geometry_msgs/msg/Twist
# This expresses velocity in free space broken into its linear and angular parts.Vector3 linearfloat64 xfloat64 yfloat64 z
Vector3 angularfloat64 xfloat64 yfloat64 zros2 topic pub
此命令用于直接发布一个话题消息。
–once 是可选参数,意思是”发布一个消息然后退出“。
ros2 topic pub <topic_name> <msg_type> '<args>'

–rate 1参数表示以1Hz的稳定频率发布命令。效果如下图:

可以使用如下命令查看乌龟的位置信息,可以看出是由turtlesim发布,echo命令订阅的。
ros2 topic echo /turtle1/pose
ros2 topic hz
此命令用来查看正在发布数据的频率。
ros2 topic hz /turtle1/pose
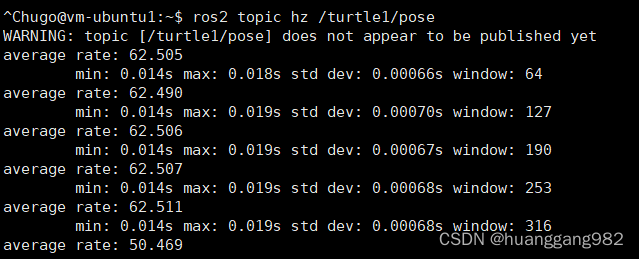
可以在一个终端执行刚才的发布/turtle1/cmd_vel,在另一个终端打印发布频率。

Clean up
在每个命令行窗口执行Ctrl+C终结他们。
相关文章:
ROS 2官方文档(基于humble版本)学习笔记(二)
ROS 2官方文档(基于humble版本)学习笔记(二) 理解节点(node)ros2 runros2 node list重映射(remap)ros2 node info 理解话题(topic)rqt_graphros2 topic listr…...

excel中公式结合实际的数据提取出公式计算的分支
要在Excel中使用公式结合实际数据提取分支信息,您可以使用一些文本函数和条件函数来实现这个目标。以下是一个示例,假设您有一个包含银行交易描述的列A,想要从中提取分支信息: 假设交易描述的格式是"分行名称-交易类型"…...

3D模型优化实战:LowPoly、纹理烘焙及格式转换
在快节奏的游戏和虚拟/增强现实 (VR/AR) 世界中,3D 模型的优化在提供引人入胜的体验方面发挥着关键作用。 这门学科不仅仅是创造令人着迷的图形结构; 这是视觉质量和游戏流畅性之间的平衡问题,确保细致而流畅的游戏环境。 通过低多边形建模等…...

genome comparison commend 2 MCMCtree
仅本人练习使用!!后续会逐渐修改!! mcmctree估算物种分歧时间 - 简书 https://www.cnblogs.com/bio-mary/p/12818888.html 估算系统树分歧时间 —— paml.mcmctree,r8s | 生信技工 http://www.chenlianfu.com/?p2948 4. 使用PAM…...

Linux安装JenkinsCLI
项目简介安装目录 mkdir -p /opt/jenkinscli && cd /opt/jenkinscli JenkinsCLI下载 wget http://<your-jenkins-server>/jnlpJars/jenkins-cli.jar # <your-jenkins-server> 替换为你的 Jenkins 服务器地址 JenkinsCLI授权 Dashboard-->Configure Glob…...
Midjourney学习(一)prompt的基础
prompt目录 sd和mj的比较prompt组成风格表现风格时代描述表情色彩情绪环境 sd和mj的比较 自从去年9月份开始,sd就变得非常或火,跟它一起的还有一个midjourney。 他们就像是程序界的两种模式,sd是开源的,有更多的可能性更可控。但是…...
12 权重衰退
过拟合的应对方法——weight_decay 权重衰退是最广泛使用的正则化方法之一。 模型容量受参数个数和参数范围影响,通过L2正则项限制w的取值范围,权重w每次更新乘以小于1的数,w的数值范围不会太大,从而降低模型复杂度,…...

简化测试流程,提供卓越服务:TestComplete+Salesforce满足不断发展的企业的需求
2015年,一群前Salesforce员工发现了病毒防护市场中的一个空白:Salesforce不会对文档进行威胁扫描。为了填补这一空白,他们创建了一个平台,并以该平台作为中心帮助公司保护所有的企业云SaaS系统,使其免受威胁。这个平台…...
kafka 命令脚本说明以及在java中使用
一、命令行使用 1.1、topic 命令 1、关于topic,这里用window 来示例 bin\windows\kafka-topics.bat2、创建 first topic,五个分区,1个副本 bin\windows\kafka-topics.bat --bootstrap-server localhost:9092 --create --partitions 5 --replication-factor 1 -…...

Qt应用开发(基础篇)——文件选择对话框 QFileDialog
一、前言 QFileDialog类继承于QDialog,提供了一个允许用户选择文件或目录的对话框。 对话框窗口 QDialog QFileDialog文件选择对话框允许用户在当前文件系统中选择一个或者多个文件或者文件路径,使用静态函数创建是很简便的方式,比如…...

图像OCR转文字,验证码识别技术太疯狂-UI软件自动化
现在用PYTHON识别图片文字,PaddleOCR,Tesseract,Opencv等很多开源技术。知识大爆炸年代,几年不学习就跟不上时代了。 以前早的时候一个验证码图片上有4个不同颜色字符,带一些杂点,我写点代码按颜色最多的进行提取&…...
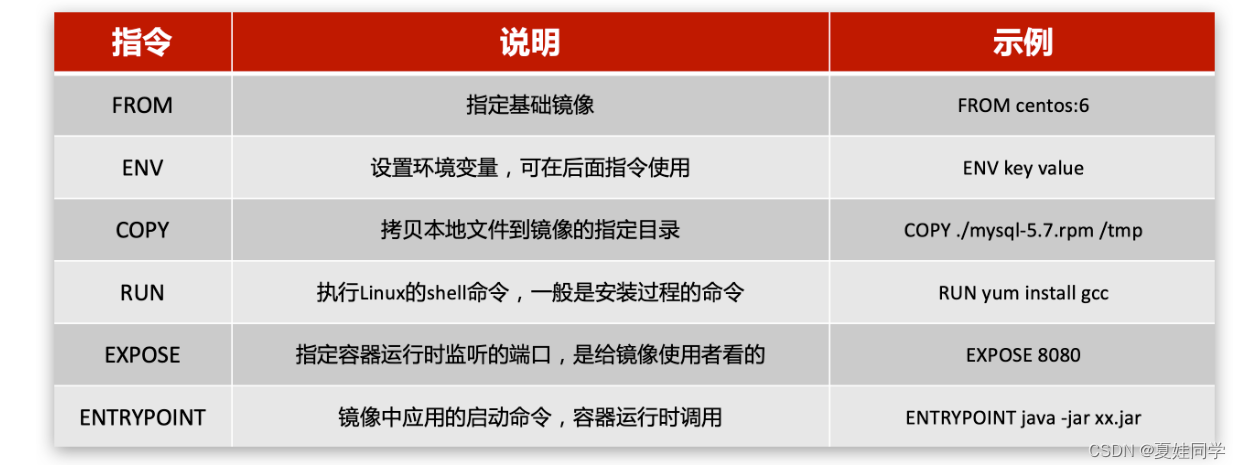
Docker:自定义镜像
(总结自b站黑马程序员课程) 环环相扣,跳过部分章节和知识点是不可取的。 一、镜像结构 镜像是分层结构,每一层称为一个Layer。 ①BaseImage层:包含基本的系统函数库、环境变量、文件系统。 ②Entrypoint࿱…...
错误处理及其它)
【Nginx22】Nginx学习:FastCGI模块(四)错误处理及其它
Nginx学习:FastCGI模块(四)错误处理及其它 FastCGI 最后一篇,我们将学习完剩下的所有配置指令。在这里,错误处理还是单独拿出来成为一个小节了,而剩下的内容都放到其它中进行学习。不要感觉是其它的就没用了…...

轮毂电机单位换算-米每秒/转每分
先前写了一篇度/S和RPM的关系 这次补全一点 假设轮毂电机直径20CM 0.2M 周长为0.628M 0.2*3.14 轮子转一圈走0.628M 1RPM的单位是转/分 换成转/S 就除以60 也就是轮子转一圈的速度0.628/60 m/S 0.010467m/S 所以换算如下: 1RPM0.010467 m/S 那么1m/S1/(0.010467) RPM95.5RPM 如…...

博流RISC-V芯片BL616开发环境搭建
文章目录 1、工具安装2、代码下载3、环境变量配置4、下载交叉编译器5、编译与下载运行6、使用ninja编译 本文分别介绍博流RISC-V芯片 BL616 在 Windows和Linux 下开发环境搭建,本文同时适用BL618,BL602,BL702,BL808系列芯片。 1、…...
Weblogic漏洞(三)之 Weblogic 弱口令、任意文件读取漏洞
Weblogic 弱口令、任意文件读取漏洞 环境安装 此次我们实验的靶场,是vnlhub中的Weblogic漏洞中的weak_password靶场,我们 cd 到weak_password,然后输入以下命令启动靶场环境: docker-compose up -d输入以下的命令可以查看当前启…...
15 mysql tiny/meidum/long blob/text 的数据存储
前言 这里主要是 由于之前的一个 datetime 存储的时间 导致的问题的衍生出来的探究 探究的主要内容为 int 类类型的存储, 浮点类类型的存储, char 类类型的存储, blob 类类型的存储, enum/json/set/bit 类类型的存储 本文主要 的相关内容是 tiny/medium/long blob/text 类…...
【方案】基于视频与AI智能分析技术的城市轨道交通视频监控建设方案
一、背景分析 地铁作为重要的公共场所交通枢纽,流动性非常高、人员大量聚集,轨道交通需要利用视频监控系统来实现全程、全方位的安全防范,这也是保证地铁行车组织和安全的重要手段。调度员和车站值班员通过系统监管列车运行、客流情况、变电…...

mysql8 修改数据存储位置
1、停止MySQL服务 systemctl stop mysqld2、复制现有的数据库目录到新的位置 默认情况下,MySQL的数据库目录位于/var/lib/mysql。假设您想将数据库目录更改为/home/mysql,您可以使用以下命令来复制数据库目录 cp -R /var/lib/mysql /home/mysql3、修改…...

Qt QSlider样式
滑块控件QSlider,如果设置的垂直样式,其进度颜色和剩余颜色,刚好和横向样式的颜色相反的,不确定这个是否是Qt的BUG,Qt456都是这个现象 QSlider::groove:horizontal{ height:8px; background:#FF0000; }QSlider::add-p…...

5个实战技巧:Unlock-Music浏览器端音乐解密技术深度解析
5个实战技巧:Unlock-Music浏览器端音乐解密技术深度解析 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: htt…...

Windows右键菜单终极管理指南:ContextMenuManager让你的电脑更高效
Windows右键菜单终极管理指南:ContextMenuManager让你的电脑更高效 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager Windows右键菜单是日常操作中不可…...
)
NotebookLM实验结果可信吗?(P值阈值设定与多重检验校正全拆解)
更多请点击: https://codechina.net 第一章:NotebookLM实验结果可信吗?(P值阈值设定与多重检验校正全拆解) NotebookLM 作为基于文档的AI实验助手,其内置的“实验模式”常用于自动比对不同提示策略或模型配…...

Zot存储清理策略终极指南:自动化管理镜像生命周期
Zot存储清理策略终极指南:自动化管理镜像生命周期 【免费下载链接】zot zot - A scale-out production-ready vendor-neutral OCI-native container image/artifact registry (purely based on OCI Distribution Specification) 项目地址: https://gitcode.com/Gi…...

混合基FFT,matlab实现
参考数字信号处理教程第四版(程佩青著)第四章FFT这里直接给出matlab函数,性能不保证最优注意,此函数只能处理混合基fft,即输入信号x的长度不能是素数,不能是2次幂整数function X mixedRadixFFT(x)% multiB…...

工控行业IO信号Web监控平台原理及技术实现方案
本文从实际使用角度出发,意在解决行业系统中的IO信号监控痛点。一台设备的 IO 信号点动辄成百上千——从简单的门锁状态、急停按钮,到复杂的真空压力模拟量、主轴转速等。这些信号的实时监控直接关系到设备稼动率(OEE)和良品率&am…...

RDP Wrapper终极指南:Windows家庭版开启多用户远程桌面的完整解决方案
RDP Wrapper终极指南:Windows家庭版开启多用户远程桌面的完整解决方案 【免费下载链接】rdpwrap RDP Wrapper Library 项目地址: https://gitcode.com/gh_mirrors/rd/rdpwrap RDP Wrapper Library是一款让Windows家庭版支持多用户远程桌面连接的革命性工具&a…...

从BJT到CMOS:运放偏置电流的前世今生,以及它对高阻抗传感器电路设计的实际影响
从BJT到CMOS:运放偏置电流的前世今生,以及它对高阻抗传感器电路设计的实际影响 在精密测量领域,运算放大器的偏置电流就像一位隐形的"电流小偷",悄无声息地影响着测量精度。想象一下,当你试图测量一个微弱的…...

QMCDecode:3步解锁QQ音乐加密音频,让音乐真正属于你!
QMCDecode:3步解锁QQ音乐加密音频,让音乐真正属于你! 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载…...

OpenClaw入门教程:从零部署到第一个智能体
OpenClaw OpenClaw(原 Moltbot)是一个开源的 AI 智能体(Agent)框架,旨在通过连接大语言模型(LLM)与外部工具(如浏览器、API、办公软件),实现自动化任务执行。…...