CUDA小白 - NPP(3) 图像处理 Color and Sampling Conversion
cuda小白
原始API链接 NPP
GPU架构近些年也有不少的变化,具体的可以参考别的博主的介绍,都比较详细。还有一些cuda中的专有名词的含义,可以参考《详解CUDA的Context、Stream、Warp、SM、SP、Kernel、Block、Grid》
常见的NppStatus,可以看这里。
如有问题,请指出,谢谢
本节内容主要涉及到使用NPP进行一些图像色域变换等,类似功能的就不细说,仅针对一些常见的。由于Debayer,不同yuv之间的转换(Color Sampling Format Conversion),Gamma校正,Complement Color Key(一直不清楚这个啥)以及Color Processing(调色相关)的接触不对,后面就不介绍了,按需。
Color Model Conversion
当前模块主要涉及到的RGB,BGR,YUV,YUV420,YUV422,NV12,YCbCr,YCbCr422和YCbCr420之间的相互转换,以及批处理(分为同样ROI和不同ROI两个接口)的接口。其他还有一些未接触过的XYZ,LUV,Lab,YCC,CMYK_JPEG,HLS,HSV等与RGB或者BGR之间的转换。
本文就那比较简单的转换,以为RGB和YUV之间的相互转换为例子。
// 此处介绍的RGB和YUV都是三通道的,如果是packed的相互转换,则后缀是C3R,如果都是planar的,则后缀是P3R,反之则是P3C3R或者C3P3R。
// =========== RGB2YUV原理 ===========
// Npp32f nY = 0.299F * R + 0.587F * G + 0.114F * B;
// Npp32f nU = (0.492F * ((Npp32f)nB - nY)) + 128.0F;
// Npp32f nV = (0.877F * ((Npp32f)nR - nY)) + 128.0F;
// if (nV > 255.0F)
// nV = 255.0F;
NppStatus nppiRGBToYUV_8u_C3R(const Npp8u *pSrc,int nSrcStep,Npp8u *pDst,int nDstStep,NppiSize oSizeROI);// =========== RGB2YUV原理 ===========
// Npp32f nY = (Npp32f)Y;
// Npp32f nU = (Npp32f)U - 128.0F;
// Npp32f nV = (Npp32f)V - 128.0F;
// Npp32f nR = nY + 1.140F * nV;
// if (nR < 0.0F) nR = 0.0F;
// if (nR > 255.0F) nR = 255.0F;
// Npp32f nG = nY - 0.394F * nU - 0.581F * nV;
// if (nG < 0.0F) nG = 0.0F;
// if (nG > 255.0F) nG = 255.0F;
// Npp32f nB = nY + 2.032F * nU;
// if (nB < 0.0F) nB = 0.0F;
// if (nB > 255.0F) nB = 255.0F;
NppStatus nppiYUVToRGB_8u_C3R(const Npp8u *pSrc,int nSrcStep,Npp8u *pDst,int nDstStep,NppiSize oSizeROI);
code
#include <iostream>
#include <cuda_runtime.h>
#include <npp.h>
#include <opencv2/opencv.hpp>#define CUDA_FREE(ptr) { if (ptr != nullptr) { cudaFree(ptr); ptr = nullptr; } }int main() {std::string directory = "../";// =============== load image ===============cv::Mat image_dog = cv::imread(directory + "dog.png");int image_width = image_dog.cols;int image_height = image_dog.rows;int image_size = image_width * image_height * 3;// =============== device memory ===============uint8_t *in_ptr, *yuv, *out_ptr;cudaMalloc((void**)&in_ptr, image_size * sizeof(uint8_t));cudaMalloc((void**)&yuv, image_size * sizeof(uint8_t));cudaMalloc((void**)&out_ptr, image_size * sizeof(uint8_t));cudaMemcpy(in_ptr, image_dog.data, image_size, cudaMemcpyHostToDevice);NppiSize roi1, roi2;roi1.width = image_width;roi1.height = image_height;roi2.width = image_width / 2;roi2.height = image_height / 2;// =============== nppiRGBToYUV_8u_C3R ===============uint8_t *host_yuv = (uint8_t *)malloc(image_size);NppStatus status;status = nppiRGBToYUV_8u_C3R(in_ptr, image_width * 3, yuv, image_width * 3, roi1);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiRGBToYUV_8u_C3R failed, status = " << status << std::endl;return false;}cudaMemcpy(host_yuv, yuv, image_size, cudaMemcpyDeviceToHost);std::string out_yuv_file = directory + "yuv.bin";FILE *fp = fopen(out_yuv_file.c_str(), "wb");fwrite(host_yuv, image_size, 1, fp);fclose(fp);// =============== nppiYUVToRGB_8u_C3R ===============cv::Mat out_image = cv::Mat::zeros(image_height, image_width, CV_8UC3);status = nppiYUVToRGB_8u_C3R(yuv, image_width * 3, out_ptr, image_width * 3, roi2);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiYUVToRGB_8u_C3R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image.data, out_ptr, image_size, cudaMemcpyDeviceToHost);cv::imwrite(directory + "out_rgb.jpg", out_image);// freeCUDA_FREE(in_ptr)CUDA_FREE(yuv)CUDA_FREE(out_ptr)if (host_yuv != nullptr) { free(host_yuv); host_yuv = nullptr; }
}
make
cmake_minimum_required(VERSION 3.20)
project(test)find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})find_package(CUDA REQUIRED)
include_directories(${CUDA_INCLUDE_DIRS})
file(GLOB CUDA_LIBS "/usr/local/cuda/lib64/*.so")add_executable(test test.cpp)
target_link_libraries(test${OpenCV_LIBS}${CUDA_LIBS}
)
result
yuv的结果,使用7yuv工具查看

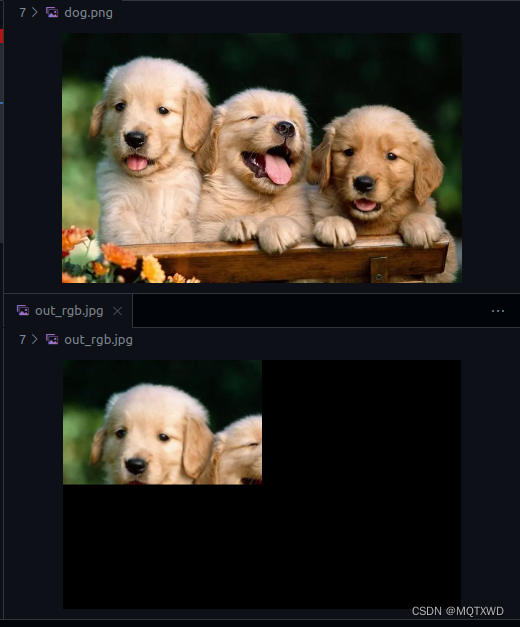
使用转换之后的yuv,再转回RGB,在限定ROI之后的结果:
注意点:
- 可以使用7yuv进行yuv图像的查看,7yuv,下载对应的版本即可,可以体验。
- 还有一个接口是基于JPEG的,主要介绍的是JPEG的Color Conversion,由于平时接触较少,这里暂时不介绍了,按需取《JPEG Color Conversion》.
ColorToGray Conversion
当前模块也主要分为三个大方向:RGBToGray,ColorToGray和GradientColorToGray。三个大方向都只选取一个比较常见的进行介绍:
// nGray = 0.299F * R + 0.587F * G + 0.114F * B;
NppStatus nppiRGBToGray_8u_C3C1R(const Npp8u *pSrc,int nSrcStep,Npp8u *pDst,int nDstStep,NppiSize oSizeROI);
// nGray = aCoeffs[0] * R + aCoeffs[1] * G + aCoeffs[2] * B;
NppStatus nppiColorToGray_8u_C3C1R(const Npp8u *pSrc,int nSrcStep,Npp8u *pDst,int nDstStep,NppiSize oSizeROI,const Npp32f aCoeffs[3]);
// NppiNorm { max(inf) / sum(L1) / square root of sum of squares(L2) }
NppStatus nppiGradientColorToGray_8u_C3C1R(const Npp8u *pSrc,int nSrcStep,Npp8u *pDst,int nDstStep,NppiSize oSizeROI,NppiNorm eNorm);
code
#include <iostream>
#include <cuda_runtime.h>
#include <npp.h>
#include <opencv2/opencv.hpp>#define CUDA_FREE(ptr) { if (ptr != nullptr) { cudaFree(ptr); ptr = nullptr; } }int main() {std::string directory = "../";// =============== load image ===============cv::Mat image_dog = cv::imread(directory + "dog.png");cv::cvtColor(image_dog, image_dog, CV_RGB2BGR);int image_width = image_dog.cols;int image_height = image_dog.rows;int image_size = image_width * image_height;// =============== device memory ===============uint8_t *in_ptr;cudaMalloc((void**)&in_ptr, image_size * 3 * sizeof(uint8_t));cudaMemcpy(in_ptr, image_dog.data, image_size * 3 * sizeof(uint8_t), cudaMemcpyHostToDevice);uint8_t *out_ptr1, *out_ptr2, *out_ptr3;cudaMalloc((void**)&out_ptr1, image_size * sizeof(uint8_t));cudaMalloc((void**)&out_ptr2, image_size * sizeof(uint8_t));cudaMalloc((void**)&out_ptr3, image_size * sizeof(uint8_t));NppiSize roi1, roi2;roi1.width = image_width;roi1.height = image_height;roi2.width = image_width / 2;roi2.height = image_height / 2;// =============== nppiRGBToGray_8u_C3C1R ===============cv::Mat out_image_gray = cv::Mat::zeros(image_height, image_width, CV_8UC1);NppStatus status;status = nppiRGBToGray_8u_C3C1R(in_ptr, image_width * 3, out_ptr1, image_width, roi1);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiRGBToGray_8u_C3C1R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image_gray.data, out_ptr1, image_size, cudaMemcpyDeviceToHost);cv::imwrite(directory + "rgb2gray.jpg", out_image_gray);// =============== nppiColorToGray_8u_C3C1R ===============float coeffs[3] = { 0.1f, 0.8f, 0.1f};status = nppiColorToGray_8u_C3C1R(in_ptr, image_width * 3, out_ptr2, image_width, roi1, coeffs);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiColorToGray_8u_C3C1R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image_gray.data, out_ptr2, image_size, cudaMemcpyDeviceToHost);cv::imwrite(directory + "color2rgb.jpg", out_image_gray);// =============== nppiGradientColorToGray_8u_C3C1R_Ctx ===============status = nppiGradientColorToGray_8u_C3C1R(in_ptr, image_width * 3, out_ptr3, image_width, roi1, nppiNormInf);if (status != NPP_SUCCESS) {std::cout << "[GPU] ERROR nppiGradientColorToGray_8u_C3C1R failed, status = " << status << std::endl;return false;}cudaMemcpy(out_image_gray.data, out_ptr3, image_size, cudaMemcpyDeviceToHost);cv::imwrite(directory + "gradient.jpg", out_image_gray);// freeCUDA_FREE(in_ptr)CUDA_FREE(out_ptr1)CUDA_FREE(out_ptr2)CUDA_FREE(out_ptr3)
}
make
cmake_minimum_required(VERSION 3.20)
project(test)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
find_package(CUDA REQUIRED)
include_directories(${CUDA_INCLUDE_DIRS})
file(GLOB CUDA_LIBS “/usr/local/cuda/lib64/*.so”)
add_executable(test test.cpp)
target_link_libraries(test
${OpenCV_LIBS}
${CUDA_LIBS}
)
result
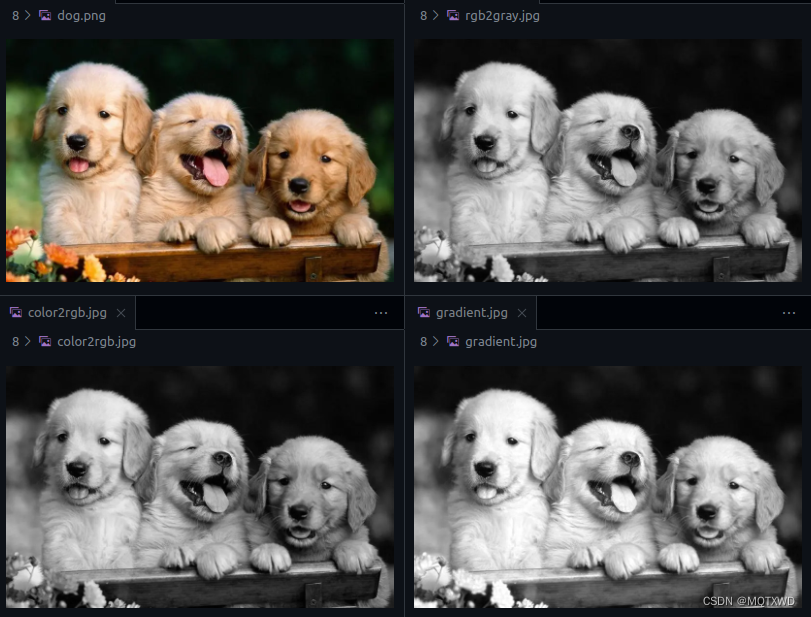
注意点:
- Color2Gray的接口与RGB2Gray的区别主要在于三个通道是不是比例关系。由于都是灰度图的,ColorGray的变化与直接rgb的转换结果差异性不易从肉眼看出来,但是通过不同的比例组合明显看出图像是有区别的。
相关文章:
CUDA小白 - NPP(3) 图像处理 Color and Sampling Conversion
cuda小白 原始API链接 NPP GPU架构近些年也有不少的变化,具体的可以参考别的博主的介绍,都比较详细。还有一些cuda中的专有名词的含义,可以参考《详解CUDA的Context、Stream、Warp、SM、SP、Kernel、Block、Grid》 常见的NppStatus…...

Android硬件通信之 串口通信
一,串口介绍 1.1 串口简介 串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方式的扩展接口; 串行接口(SerialInterface)是指数据一位一位地顺序…...

高防服务器面对DDOS攻击的威胁有何必要性
高防服务器面对DDOS攻击的威胁有何必要性?分布式拒绝服务(DDoS)攻击是一种常见而危险的网络攻击形式,它可以使目标网络服务器过载,导致服务不可用。本文将深入探讨DDoS攻击的威胁,以及高防服务器在抵御这种…...

VBA中如何将if写到一行
在VBA中,可以使用以下两种方式来编写一行if语句: 使用三元运算符: Dim result As String result "Yes" If True Else "No"在这个例子中,如果条件为真,则result变量的值为"Yes"&#…...

性能测试,python 内存分析工具 -memray
Memray是一个由彭博社开发的、开源内存剖析器;开源一个多月,已经收获了超8.4k的star,是名副其实的明星项目。今天我们就给大家来推荐这款python内存分析神器。 Memray可以跟踪python代码、本机扩展模块和python解释器本身中内存分配…...
Jmeter(二十八):beanshell的使用
Beanshell 是一种轻量级的 Java 脚本,纯 Java 编写的,能够动态的执行标准 java 语法及一些扩展脚本语法,类似于 javaScript,在工作中可能用的多的就是: Beanshell 取样器:跟Http取样器并列Beanshell前置处理器:一般放在Http请求下,在请求前处理一些数据Beanshell后置处…...
数学建模:层次分析法
🔆 文章首发于我的个人博客:欢迎大佬们来逛逛 层次分析法 步骤描述 将问题条理化,层次化,构建出一个有层次的结构模型。层次分为三类:目标层,准则(指标)层,方案层。比…...
POI-TL制作word
本文相当于笔记,主要根据官方文档Poi-tl Documentation和poi-tl的使用(最全详解)_JavaSupeMan的博客-CSDN博客文章进行学习(上班够用) Data AllArgsConstructor NoArgsConstructor ToString EqualsAndHashCode public …...

大数据Flink(七十一):SQL的时间属性
文章目录 SQL的时间属性 一、Flink三种时间属性简介...
51单片机项目(7)——基于51单片机的温湿度测量仿真
本次做的设计,是利用DHT11传感器,测量环境的温度以及湿度,同时具备温度报警的功能:利用两个按键,设置温度阈值的加和减,当所测温度大于温度阈值的时候,蜂鸣器就会响起,进行报警提示。…...

按钮控件之1---QPushButton 标准按钮/普通按钮控件
1、父类QAbstractButton 2、QPushButton按钮,是Qt常用的控件之一,提供普通的按钮功能。 通过信号槽机制接收触发信号并执行对应动作。3、创建QPushButton 它有三个构造函数: // 空对象 QPushButton(QWidget *parent nullptr); // 指定QPus…...

Ae 效果:CC Light Rays
生成/CC Light Rays Generate/CC Light Rays CC Light Rays(CC 光线)可以创建从光源发出并能穿过图层内容的光线效果。常用于制作光线透过门窗或云层的场景,或者用于创建神奇或梦幻的氛围感。 本效果会被限制在源图层的大小范围之内。 ◆ ◆…...

MPI之通信模式(标准,缓存,同步,就绪)
MPI缓冲区 由MPI自行维护的一块内存区域,也可由用户(MPI_Bsend)自行维护;发送方 维护一块发送缓冲区; 接收方 维护一块接收缓冲区。 数据收发过程: 当发送端将数据拷贝到自身的数据缓冲区后(注意这里是拷贝,即数据到…...
面试官:说一下 MyBatis 的一级缓存和二级缓存 ?
目录 1. MyBatis 的缓存机制 2. 为什么不默认开启 MyBatis 的二级缓存 3. MyBatis 如何开启二级缓存 4. MyBatis 有哪些缓存清除策略 1. MyBatis 的缓存机制 MyBayis 中包含两级缓存:一级缓存和二级缓存 1. 一级缓存是 SqlSession 级别的,是 MyBati…...

Ajax与jQuery
目录 Ajax是一种异步无刷新的技术 Ajax的优点: 可以无需刷新页面与服务器端进行通信允许根据用户事件来更新部分页面内容 Ajax的缺点: 没有浏览历史,不能回退存在跨域问题(同源)SEO(搜索引擎优化&#x…...
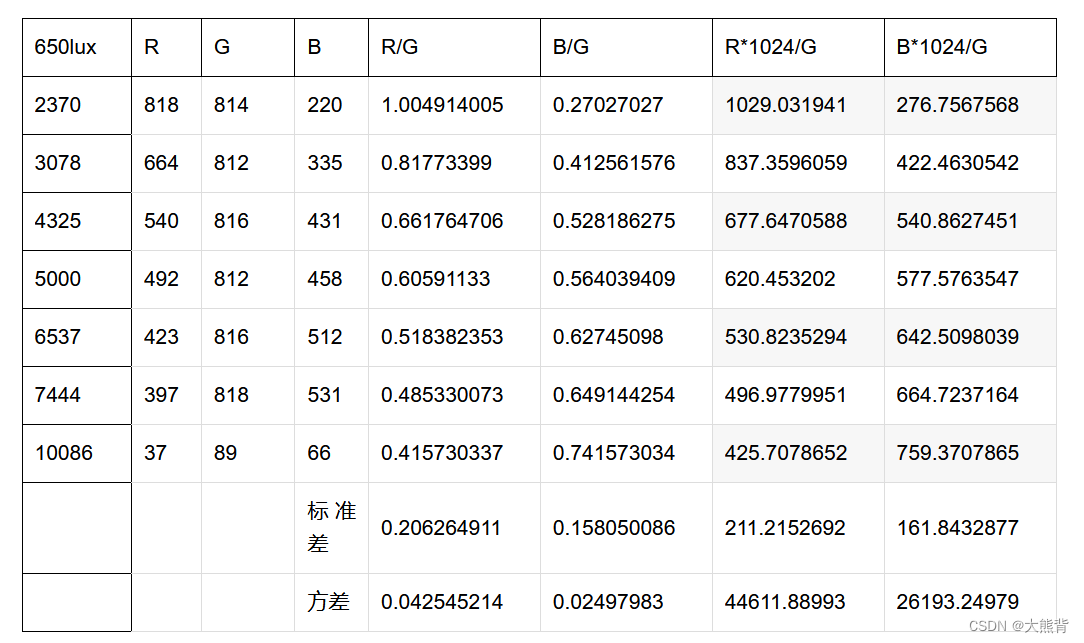
色温曲线坐标轴的选取:G/R、G/B还是R/G、B/G ?
海思色温曲线坐标 Mstar色温曲线坐标 高通色温曲线坐标 联咏色温曲线坐标 查看各家白平衡调试界面,比如海思、Mstart、高通等调试资料,白平衡模块都是以R/G B/G作为坐标系的两个坐标轴,也有方案是以G/R G/B作为坐标系的两个坐标轴。 以G/R G…...

maven部署
一、下载Maven 地址:Maven – Download Apache Maven 二、解压缩,设置环境变量 tar -xvf apache-maven-3.8.8-bin.tar.gz export MAVEN_HOME/opt/apache-maven-3.8.8 export PATH$MAVEN_HOME/bin:$PATH echo $MAVEN_HOME echo $PATH mvn -v...

docker进阶作业
一、使用mysql:5.6和 owncloud 镜像,构建一个个人网盘。 安装Docker:确保已在CentOS 7.5上安装了Docker。 拉取MySQL 5.6镜像:使用以下命令从Docker Hub上拉取MySQL 5.6镜像。 docker pull mysql:5.6 运行MySQL容器:使用以下命令…...
HTML+JavaScript+CSS DIY 分隔条splitter
一、需求分析 现在电脑的屏幕越来越大,为了利用好宽屏,我们在设计系统UI时喜欢在左侧放个菜单或选项面板,在右边显示与菜单或选项对应的内容,两者之间用分隔条splitter来间隔,并可以通过拖动分隔条splitter来动态调研…...

Oracle-day5:新增、复制建表、表结构、表数据、删除
目录 一、insert新增数据 二、复制建表 三、表结构修改 四、查看表结构、表数据处理 五、修改表数据 六、删除语句 八、练习题 一、insert新增数据 /* ---------- 一、DML 数据操作语言-------- -- 1、增加数据 insert 语法:insert into 表名 (列1,列2,…...

医疗AI公平性评估:从数据复杂性到系统任意性的三支柱分析框架
1. 项目概述:当医疗AI遇上公平性拷问在医疗健康领域,机器学习模型正从实验室的“概念验证”阶段,大步迈向临床决策支持的“实战”前线。无论是预测糖尿病风险,还是辅助诊断心脏病,这些算法模型的核心承诺是:…...

基于决策树与贝叶斯DNS的宏观机制转换利率模型
1. 项目概述与核心价值如果你在固收研究或者宏观交易领域待过一段时间,肯定会遇到一个让人头疼的问题:那些经典的收益率曲线模型,比如动态Nelson-Siegel模型,在样本内拟合得挺好,但一到样本外预测或者解释某些特殊时期…...

智谱清言 LeetCode 2573. 找出对应 LCP 矩阵的字符串 Python3实现
LeetCode 2573. 找出对应 LCP 矩阵的字符串 思路分析 LCP 矩阵定义:lcp[i][j] 表示字符串 s 从位置 i 和位置 j 开始的最长公共前缀长度。 核心观察:LCP 矩阵具有递推性质: 若 lcp[i][j] > 0,则 lcp[i1][j1] lcp[i][j] - 1&am…...

神经网络辅助可变形匹配滤波器在光通信中的应用
1. 神经网络辅助可变形匹配滤波器技术解析在光通信系统中,匹配滤波器作为信号检测的关键组件,其性能直接影响整个通信链路的可靠性。传统固定匹配滤波器基于理想信道假设设计,当面对实际系统中的带宽限制、大气湍流等复杂信道条件时ÿ…...

从零读懂RDMA流控机制:为什么RC需要“信用”
我们在之前的文章里讲过,RDMA RC(可靠连接)模式像一条点对点的专用通道:发送端发数据,接收端确认,丢了包硬件重传。一切看起来很简单,但有一个关键问题没解决: 发送端怎么知道接收端“吃得下”自己发过去的数据? 如果发送端不管不顾地疯狂发,而接收端处理不过来,数据…...

《离别的最后》的内容入口:收尾场景如何被记住
从内容传播角度看,《离别的最后》的入口在“最后”这个收束动作。它不是笼统告别,而是写到一段关系、一个阶段或一次转身即将落下尾音的时刻。这首歌不适合被写成普通伤感推荐。更准确的角度,是把它放在收尾场景里:删掉草稿、收起…...

proj-agones:知识点:helm
helm install之后的log be like:(base) savilahaobogon ~ % helm install prometheus prometheus-community/kube-prometheus-stack -n monitoring --create-namespace NAME: prometheus LAST DEPLOYED: Wed May 20 14:54:39 2026 NAMESPACE: monitoring STATUS: de…...

MDK Middleware网络组件的嵌入式安全防护解析
1. MDK Middleware网络组件的安全特性解析在嵌入式系统开发中,网络安全往往是最容易被忽视却又至关重要的环节。作为Keil MDK开发环境的核心组件,Middleware Network为Cortex-M系列微控制器提供了轻量级TCP/IP协议栈实现。不同于桌面级操作系统自带的网络…...

OpCore Simplify:一键生成OpenCore EFI的终极解决方案
OpCore Simplify:一键生成OpenCore EFI的终极解决方案 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为黑苹果配置的复杂流程头疼吗&…...

影刀RPA跨境店群自动化:分布式环境调度与高并发资源隔离架构实战
定了。在这场旷日持久的跨境电商反爬风控拉锯战中,我们终于用一套基于 Python 深度协同的分布式微服务调度架构,重塑了跨境千店矩阵的自动化底座。 这几天,科技圈被“DeepSeek V4 首发华为昇腾芯片,国产 AI 开始打破英伟达 CUDA …...