坐标系概念 四元数 欧拉角
1、四个概念:“地理”坐标系、“机体”坐标系、他们之间换算公式、换算公式用的系数。
地理坐标系:东、北、天,以下简称地理。在这个坐标系里有重力永远是(0,0,1g),地磁永远是(0,1,x)(地磁的垂直不关心)两个三维向量。
机体坐标系:以下简称机体,上面有陀螺、加计、电子罗盘传感器,三个三维向量。
换算公式:以下简称公式,公式就是描述机体姿态的表达方法,一般都是用以地理为基准,从地理换算到机体的公式,有四元数、欧拉角、方向余弦矩阵。
换算公式的系数:以下简称系数,四元数的q0123、欧拉角的ROLL/PITCH/YAW、余弦矩阵的9个数。系数就是描述机体姿态的表达方法的具体数值。
姿态,其实就是公式+系数的组合,一般经常用人容易理解的公式“欧拉角”表示,系数就是横滚xx度俯仰xx度航向xx度。
2、五个数据源:重力、地磁、陀螺、加计、电子罗盘,前两个来自地理,后三个来自机体。
3、陀螺向量:基于机体,也在机体上积分,因为地理上无参考数据源,所以很独立,直接在公式的老系数上积分,得到新系数。
狭义上的捷联惯导算法,就是指这个陀螺积分公式,也分为欧拉角、方向余弦矩阵、四元数,他们的积分算法有增量法、数值积分法(X阶龙格-库塔)等等
4、加计向量、重力向量:加计基于机体,重力基于地理,重力向量(0,0,1g)用公式换算到机体,与机体的加计向量算出误差。理论上应该没有误差,这误差逆向思维一下,其实就是换算公式的系数误差。所以这误差可用于纠正公式的系数(横滚、俯仰),也就是姿态。
5、电子罗盘向量、地磁向量:同上,只不过要砍掉地理上的垂直向量,因为无用。只留下地理水平面上的向量。误差可以用来纠正公式的系数(航向)。
6、就这样,系数不停地被陀螺积分更新,也不停地被误差修正,它和公式所代表的姿态也在不断更新。
如果积分和修正用四元数算法(因为运算量较少、无奇点误差),最后用欧拉角输出控制PID(因为角度比较直观),那就需要有个四元数系数到欧拉角系数的转换。常用的三种公式,它们之间都有转换算法。
//=====================================================================================================
// IMU.c
// S.O.H. Madgwick
// 25th September 2010
//=====================================================================================================
// Description:
//
// Quaternion implementation of the 'DCM filter' [Mayhony et al].
//
// User must define 'halfT' as the (sample period / 2), and the filter gains 'Kp' and 'Ki'.
//
// Global variables 'q0', 'q1', 'q2', 'q3' are the quaternion elements representing the estimated
// orientation. See my report for an overview of the use of quaternions in this application.
//
// User must call 'IMUupdate()' every sample period and parse calibrated gyroscope ('gx', 'gy', 'gz')
// and accelerometer ('ax', 'ay', 'ay') data. Gyroscope units are radians/second, accelerometer
// units are irrelevant as the vector is normalised.
//
//=====================================================================================================
//----------------------------------------------------------------------------------------------------
// Header files
#include "IMU.h"
#include <math.h>
//----------------------------------------------------------------------------------------------------
// Definitions
#define Kp 2.0f // proportional gain governs rate of convergence to accelerometer/magnetometer
#define Ki 0.005f // integral gain governs rate of convergence of gyroscope biases
#define halfT 0.5f // half the sample period
//---------------------------------------------------------------------------------------------------
// Variable definitions
float q0 = 1, q1 = 0, q2 = 0, q3 = 0; // quaternion elements representing the estimated orientation
float exInt = 0, eyInt = 0, ezInt = 0; // scaled integral error
//====================================================================================================
// Function
//====================================================================================================
void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az) {
float norm;
float vx, vy, vz;
float ex, ey, ez;
// normalise the measurements
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
把加计的三维向量转成单位向量。
// estimated direction of gravity
vx = 2*(q1*q3 - q0*q2);
vy = 2*(q0*q1 + q2*q3);
vz = q0*q0 - q1*q1 - q2*q2 + q3*q3;
这是把四元数换算成《方向余弦矩阵》中的第三列的三个元素。
根据余弦矩阵和欧拉角的定义,地理坐标系的重力向量,转到机体坐标系,正好是这三个元素。
所以这里的vx\y\z,其实就是当前的欧拉角(即四元数)的机体坐标参照系上,换算出来的重力单位向量。
// error is sum of cross product between reference direction of field and direction measured by sensor
ex = (ay*vz - az*vy);
ey = (az*vx - ax*vz);
ez = (ax*vy - ay*vx);
axyz是机体坐标参照系上,加速度计测出来的重力向量,也就是实际测出来的重力向量。
axyz是测量得到的重力向量,vxyz是陀螺积分后的姿态来推算出的重力向量,它们都是机体坐标参照系上的重力向量。
那它们之间的误差向量,就是陀螺积分后的姿态和加计测出来的姿态之间的误差。
向量间的误差,可以用向量叉积(也叫向量外积、叉乘)来表示,exyz就是两个重力向量的叉积。
这个叉积向量仍旧是位于机体坐标系上的,而陀螺积分误差也是在机体坐标系,而且叉积的大小与陀螺积分误差成正比,正好拿来纠正陀螺。(你可以自己拿东西想象一下)由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对机体坐标系的纠正。
// integral error scaled integral gain
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
// adjusted gyroscope measurements
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
用叉积误差来做PI修正陀螺零偏
// integrate quaternion rate and normalise
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
四元数微分方程
// normalise quaternion
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm;
q1 = q1 / norm;
q2 = q2 / norm;
q3 = q3 / norm;
四元数规范化
}
//====================================================================================================
// END OF CODE
//====================================================================================================
//=====================================================================================================
// AHRS.c
// S.O.H. Madgwick
// 25th August 2010
//=====================================================================================================
// Description:
//
// Quaternion implementation of the 'DCM filter' [Mayhony et al]. Incorporates the magnetic distortion
// compensation algorithms from my filter [Madgwick] which eliminates the need for a reference
// direction of flux (bx bz) to be predefined and limits the effect of magnetic distortions to yaw
// axis only.
//
// User must define 'halfT' as the (sample period / 2), and the filter gains 'Kp' and 'Ki'.
//
// Global variables 'q0', 'q1', 'q2', 'q3' are the quaternion elements representing the estimated
// orientation. See my report for an overview of the use of quaternions in this application.
//
// User must call 'AHRSupdate()' every sample period and parse calibrated gyroscope ('gx', 'gy', 'gz'),
// accelerometer ('ax', 'ay', 'ay') and magnetometer ('mx', 'my', 'mz') data. Gyroscope units are
// radians/second, accelerometer and magnetometer units are irrelevant as the vector is normalised.
//
//=====================================================================================================
//----------------------------------------------------------------------------------------------------
// Header files
#include "AHRS.h"
#include <math.h>
//----------------------------------------------------------------------------------------------------
// Definitions
#define Kp 2.0f // proportional gain governs rate of convergence to accelerometer/magnetometer
#define Ki 0.005f // integral gain governs rate of convergence of gyroscope biases
#define halfT 0.5f // half the sample period
//---------------------------------------------------------------------------------------------------
// Variable definitions
float q0 = 1, q1 = 0, q2 = 0, q3 = 0; // quaternion elements representing the estimated orientation
float exInt = 0, eyInt = 0, ezInt = 0; // scaled integral error
//====================================================================================================
// Function
//====================================================================================================
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz) {
float norm;
float hx, hy, hz, bx, bz;
float vx, vy, vz, wx, wy, wz;
float ex, ey, ez;
// auxiliary variables to reduce number of repeated operations
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
float q0q3 = q0*q3;
float q1q1 = q1*q1;
float q1q2 = q1*q2;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
// normalise the measurements
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
norm = sqrt(mx*mx + my*my + mz*mz);
mx = mx / norm;
my = my / norm;
mz = mz / norm;
从机体坐标系的电子罗盘测到的矢量转成地理坐标系下的磁场矢量hxyz(测量值)
// compute reference direction of flux
hx = 2*mx*(0.5 - q2q2 - q3q3) + 2*my*(q1q2 - q0q3) + 2*mz*(q1q3 + q0q2);
hy = 2*mx*(q1q2 + q0q3) + 2*my*(0.5 - q1q1 - q3q3) + 2*mz*(q2q3 - q0q1);
hz = 2*mx*(q1q3 - q0q2) + 2*my*(q2q3 + q0q1) + 2*mz*(0.5 - q1q1 - q2q2);
计算地理坐标系下的磁场矢量bxyz(参考值)。
因为地理地磁水平夹角,我们已知是0度(抛去磁偏角的因素,固定向北),所以by=0,bx=某值
但地理参考地磁矢量在垂直面上也有分量bz,地球上每个地方都是不一样的。
我们无法得知,也就无法用来融合(有更适合做垂直方向修正融合的加速度计),所以直接从测量值hz上复制过来,bz=hz。
磁场水平分量,参考值和测量值的大小应该是一致的(bx*bx) + (by*by)) = ((hx*hx) + (hy*hy))。
因为by=0,所以就简化成(bx*bx) = ((hx*hx) + (hy*hy))。可算出bx。
bx = sqrt((hx*hx) + (hy*hy));
bz = hz;
// estimated direction of gravity and flux (v and w)
vx = 2*(q1q3 - q0q2);
vy = 2*(q0q1 + q2q3);
vz = q0q0 - q1q1 - q2q2 + q3q3;
我们把地理坐标系上的磁场矢量bxyz,转到机体上来wxyz。
因为by=0,所以所有涉及到by的部分都被省略了。
类似上面重力vxyz的推算,因为重力g的gz=1,gx=gy=0,所以上面涉及到gxgy的部分也被省略了
你可以看看两个公式:wxyz的公式,把bx换成gx(0),把bz换成gz(1),就变成了vxyz的公式了(其中q0q0+q1q1+q2q2+q3q3=1)。
wx = 2*bx*(0.5 - q2q2 - q3q3) + 2*bz*(q1q3 - q0q2);
wy = 2*bx*(q1q2 - q0q3) + 2*bz*(q0q1 + q2q3);
wz = 2*bx*(q0q2 + q1q3) + 2*bz*(0.5 - q1q1 - q2q2);
现在把加速度的测量矢量和参考矢量做叉积,把磁场的测量矢量和参考矢量也做叉积。都拿来来修正陀螺。
// error is sum of cross product between reference direction of fields and direction measured by sensors
ex = (ay*vz - az*vy) + (my*wz - mz*wy);
ey = (az*vx - ax*vz) + (mz*wx - mx*wz);
ez = (ax*vy - ay*vx) + (mx*wy - my*wx);
// integral error scaled integral gain
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
// adjusted gyroscope measurements
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
// integrate quaternion rate and normalise
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
// normalise quaternion
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm;
q1 = q1 / norm;
q2 = q2 / norm;
q3 = q3 / norm;
}
//====================================================================================================
// END OF CODE
//====================================================================================================
相关文章:

坐标系概念 四元数 欧拉角
1、四个概念:“地理”坐标系、“机体”坐标系、他们之间换算公式、换算公式用的系数。地理坐标系:东、北、天,以下简称地理。在这个坐标系里有重力永远是(0,0,1g),地磁永远是(0,1,x)…...

从0开始写Vue项目-SpringBoot整合Mybatis-plus实现登录、注册功能
1.从0开始写Vue项目-环境和项目搭建_慕言要努力的博客-CSDN博客 2. 从0开始写Vue项目-Vue2集成Element-ui和后台主体框架搭建_慕言要努力的博客-CSDN博客 3. 从0开始写Vue项目-Vue页面主体布局和登录、注册页面_慕言要努力的博客-CSDN博客 一、前言 在之前我们以及搭建好了基…...
K8s中gRpc通信负载均衡失效
上篇文章在做 整合K8sSpringCloudK8sSpringBootgRpc 时,发现K8s中使用gRpc通信,负载均衡功能失效查了下gRpc的最佳实践,找到这里Load balancingSome load balancers dont work effectively with gRPC. L4 (transport) load balancers operate…...

第三届区块链服务网络(BSN)全球合作伙伴大会在杭州成功举办
为持续推动分布式技术和产业创新发展,2023年2月17日,由杭州市人民政府指导,杭州市拱墅区人民政府、国家信息中心主办,中国移动通信集团有限公司、区块链服务网络(BSN)发展联盟承办,中国移动通信…...
人工智能基础部分13-LSTM网络:预测上证指数走势
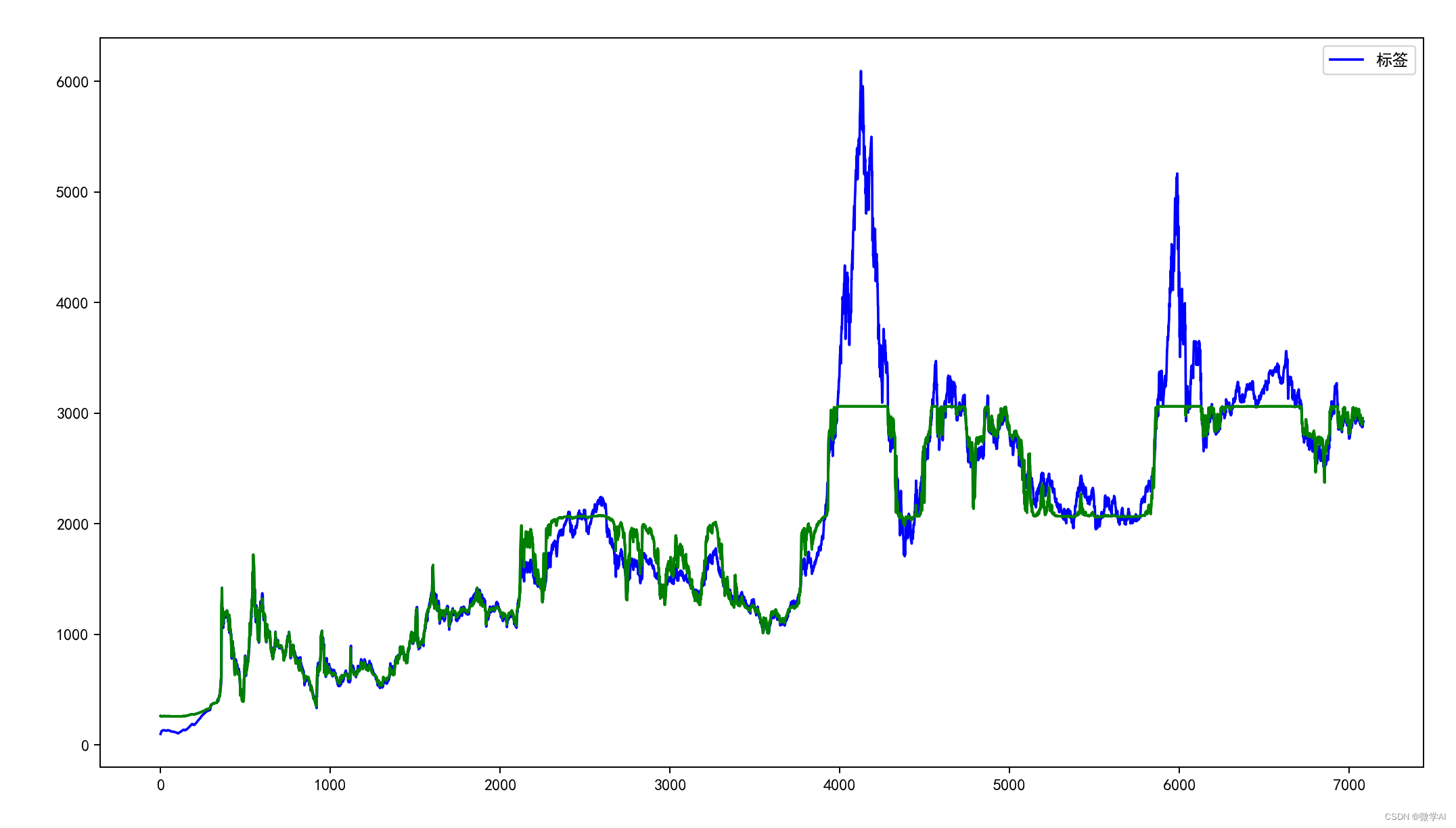
大家好,我是微学AI,今天给大家介绍一下LSTM网络,主要运用于解决序列问题。 一、LSTM网络简单介绍 LSTM又称为:长短期记忆网络,它是一种特殊的 RNN。LSTM网络主要是为了解决长序列训练过程中的梯度消失和梯度爆炸问题…...

内网穿透/组网/设备上云平台EasyNTS上云网关的安装操作指南
EasyNTS上云网关的主要作用是解决异地视频共享/组网/上云的需求,网页对域名进行添加映射时,添加成功后会生成一个外网访问地址,在浏览器中输入外网访问地址,即可查看内网应用。无需开放端口,EasyNTS上云网关平台会向Ea…...
易点天下基于 StarRocks 全面构建实时离线一体的湖仓方案
作者:易点天下数据平台团队易点天下是一家技术驱动发展的企业国际化智能营销服务公司,致力于为客户提供全球营销推广服务,通过效果营销、品牌塑造、垂直行业解决方案等一体化服务,帮助企业在全球范围内高效地获取用户、提升品牌知…...
Tomcat的类加载机制
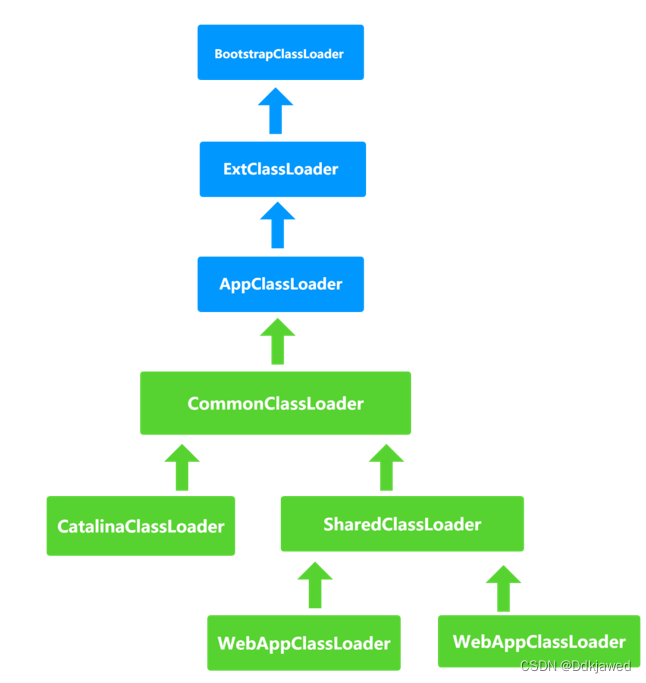
不遵循双亲委托 在JVM中并不是一次性地把所有的文件都加载到,而是按需加载,加载机制采用 双亲委托原则,如下图所示: BootStrapClassLoader 引导类加载器ExtClassLoader 扩展类加载器AppClassLoader 应用类加载器CustomClassLoad…...

【shell 编程大全】数组,逻辑判断以及循环
数组,逻辑判断以及循环1. 概述 大家好,我又来了。今天呢我们继续学习shell相关的知识。还是老样子我们先回顾下上一次【脚本交互 以及表达式】学习到的知识 登录shell 关联配置文件什么是子shellumask 修改默认权限read 基础表达式 简单计算表达式expr 计…...

Android13 Bluetooth更新
目录 Android 13 版本说明 LE Audio 代码更新 Android 12代码路径 Android 13代码路径 Android 13 版本说明 里面对蓝牙更新的描述较少,一出提到蓝牙的一...
手工测试混了5年,年底接到了被裁员的消息....
大家都比较看好软件测试行业,只是因为表面上看起来:钱多事少加班少。其实这个都是针对个人运气好的童人才会有此待遇。在不同的阶段做好不同阶段的事情,才有可能离这个目标更近,作为一枚软件测试人员,也许下面才是我们…...
Umi框架
什么是 umi umi 是由 dva 的开发者 云谦 编写的一个新的 React 开发框架。umi 既是一个框架也是一个工具,可以将它简单的理解为一个专注性能的类 next.js 前端框架,并通过约定、自动生成和解析代码等方式来辅助开发,减少开发者的代码量。 u…...
教你学git
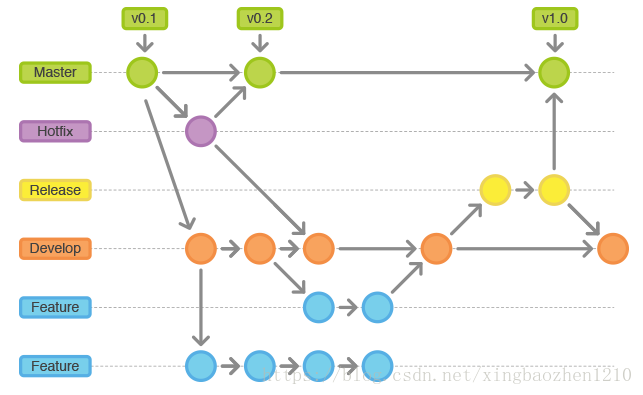
前言 git是一种用于多人合作写项目。详细说明如下 文章目录前言什么是版本控制?什么是 Git?它就属于人工版本控制器版本控制工具常见版本控制工具怎么工作的?git 文件生命周期状态区域安装配置-- global检查配置创建仓库工作流与基本操作查看…...
【工作笔记】syslog,kern.log大量写入invalid cookie错误信息问题
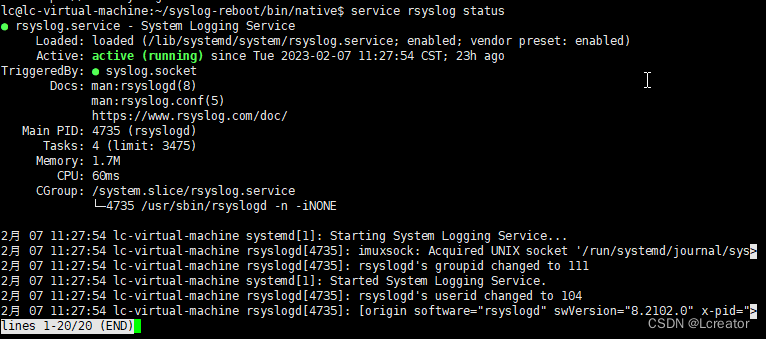
任务描述 错误出现出现过四五次,应该是诊断单元tf卡读写出问题导致下面这条告警一直高频写入到/var/log/下的syslog、kern.log、messages中 Nov 23 06:25:12 embest kernel: omap_hsmmc 48060000.mmc: [omap_hsmmc_pre_dma_transfer] invalid cookie: data->hos…...

【C++】多线程
多任务处理有两种形式,即:多进程和多线程。 基于进程的多任务处理是程序的并发执行。基于线程的多任务处理是同一程序的片段的并发执行 文章目录1. 多线程介绍2. Windows多线程1. 多线程介绍 每一个进程(可执行程序)都有一个主线…...
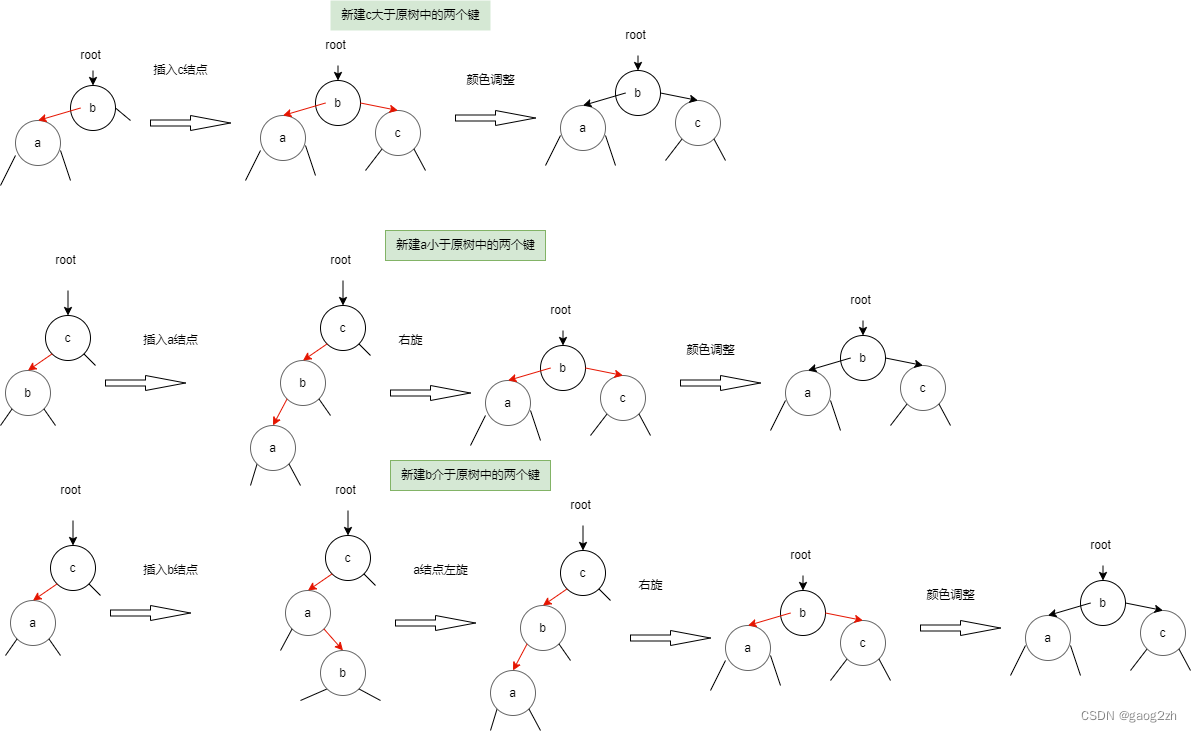
0202插入删除-算法第四版红黑树-红黑树-数据结构和算法(Java)
文章目录4 插入4.1 序4.2 向单个2-结点插入新键4.3 向树底部的2-结点插入新键4.4 向一棵双键树(3-结点)中插入新键4.5 颜色调整4.6 根结点总是黑色4.7 向树底部的3-结点插入新键4.8 将红链接在树中向上传递4.9 实现5 删除5.1 删除最小键5.2 删除6 有序性…...

vue 生成二维码插件 vue-qr使用方法
一、安装 npm install vue-qr --save二、引入 import VueQr from vue-qrcomponents:{VueQr,},三、使用 <vue-qr:text"dyQrcode":size"170":logoSrc"logo":margin"6":logoScale"0.2"></vue-qr>四、属性说明 …...
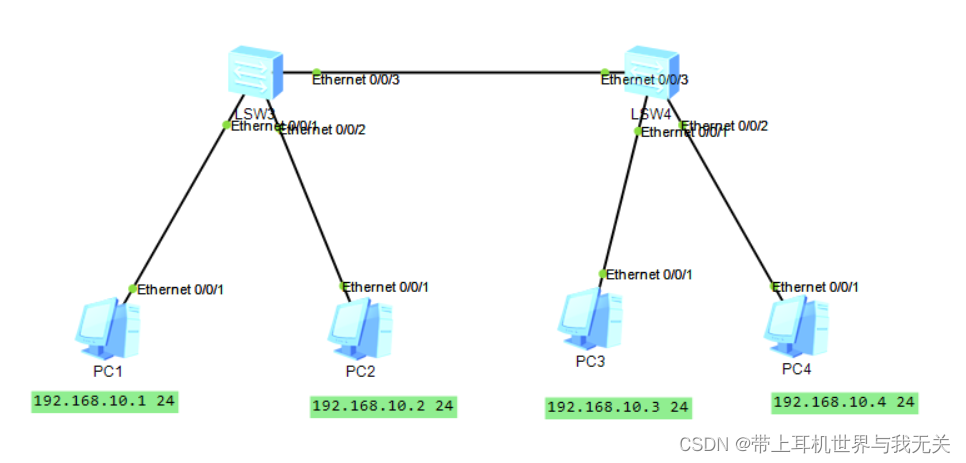
网络工程课(二)
ensp配置vlan 一、配置计算机ip地址和子网掩码 二、配置交换机LSW1 system-view [Huawei]sysname SW1 [SW1]vlan batch 10 20 [SW1]interface Ethernet0/0/1 [SW1-Ethernet0/0/1]port link-type access 将接口设为access接口 [SW1-Ethernet0/0/1]port default vlan 10 [SW1-E…...
: 梯度累加)
Pytorch并行计算(三): 梯度累加
梯度累加 梯度累加(Gradient Accmulation)是一种增大训练时batch size的技巧。当batch size在一张卡放不下时,可以将很大的batch size分解为一个个小的mini batch,分别计算每一个mini batch的梯度,然后将其累加起来优…...
最小覆盖子串(滑动窗口解法))
蓝桥杯入门即劝退(十八)最小覆盖子串(滑动窗口解法)
欢迎关注点赞评论,共同学习,共同进步! ------持续更新蓝桥杯入门系列算法实例-------- 如果你也喜欢Java和算法,欢迎订阅专栏共同学习交流! 你的点赞、关注、评论、是我创作的动力! -------希望我的文章…...

智能检索新范式,让AIAgent自主决策,提升RAG效率100%!
市面上的 RAG 系统,不管叫什么名字,本质上只有两种做法: 第一种,一次性检索。把用户的 query 向量化,从语料库里捞出 Top-K 个文档片段,拼成一个大 prompt 塞给模型。GraphRAG、HippoRAG、LightRAG 都属于…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...

开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南
开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南 【免费下载链接】Tkinter-Designer An easy and fast way to create a Python GUI 🐍 项目地址: https://gitcode.com/gh_mirrors/tk/Tkinter-Designer 在Python GUI开发…...

PCB虚焊/走线断裂/焊盘脱落工程师易漏判
PCB 故障中,30% 并非元件损坏,而是 PCB 本身的隐性故障—— 虚焊、走线断裂、焊盘脱落、过孔开路。这类故障外观隐蔽、时好时坏、排查难度大,很多工程师反复更换元件仍无法解决,最终误判为 “板报废”。一、PCB 隐性故障核心成因…...

OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案
OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否拥有一台性能尚可但已被…...

DIY四路自动音频源切换器:从信号检测到继电器隔离的完整设计
1. 项目概述与核心需求解析作为一个喜欢在工作室里捣鼓各种音频设备的玩家,我经常遇到一个挺烦人的问题:我的功放只有一组输入,但我想接的设备却有好几个——台式电脑、平板、蓝牙接收模块,还有一台树莓派。每次想切换音源&#x…...

终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词
终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否厌倦了在听歌时手动搜索歌词…...

告别枯燥理论!用Unity脚本生命周期与预制体玩转一个“会变身的敌人”
用Unity打造会变身的敌人:脚本生命周期与预制体的实战应用在游戏开发中,敌人AI的行为设计往往是新手开发者最感兴趣也最容易感到困惑的部分。Unity的脚本生命周期和预制体系统为这类需求提供了强大支持,但教科书式的讲解常常让学习者陷入枯燥…...
)
从单体到事件驱动的生死跃迁:DeepSeek架构委员会认证的6阶段迁移路线图(含风险热力图与回滚触发阈值表)
更多请点击: https://codechina.net 第一章:从单体到事件驱动的生死跃迁:DeepSeek架构委员会认证的6阶段迁移路线图(含风险热力图与回滚触发阈值表) 向事件驱动架构(EDA)演进不是功能迭代&…...

树莓派Zero离线语音交互实战:TTS与STT引擎部署与优化
1. 项目概述:为什么选择树莓派 Zero 来实现语音功能?如果你玩过 Arduino、ESP32 这类微控制器,也接触过树莓派 4B 这样的单板电脑,那你大概能理解那种“选择困难症”:微控制器实时性强、功耗低,但算力有限&…...