【USRP】产品型号、参数、架构全解析系列 6:N320 / N321
一、USRP 简介
通用软件无线电外设( USRP ) 是由 Ettus Research 及其母公司National Instruments设计和销售的一系列软件定义无线电。USRP 产品系列由Matt Ettus领导的团队开发,被研究实验室、大学和业余爱好者广泛使用。
大多数 USRP 通过以太网线连接到主机,基于主机的软件使用该链路来控制 USRP 硬件并传输/接收数据。一些 USRP 型号还将主机的一般功能与嵌入式处理器集成在一起,允许 USRP 设备以独立方式运行。
USRP 系列专为易操作性而设计,并且许多产品都是开源硬件。部分 USRP 型号的电路板、原理图、元器件的BOM表都是可以免费下载的;
所有USRP产品均由开源UHD驱动程序控制,该驱动程序是免费的而且是开源软件。USRP 通常与GNU Radio软件套件一起使用来创建复杂的软件定义无线电系统。
官网链接:
Ettus Research
National Instruments
软件无线电是RF收发仪,支持先进无线应用的快速原型验证和部署。SDR可用于无线通信、部署信号智能系统或作为多通道测试台的构建块。
USRP支持的开发工具链:
- LabVIEW
- MATLAB
- Simulink
- GNU Radio
- Python
- C & Cpp
二、N320/321 系列

上文介绍了N210 系列的产品,这期继续介绍N系列的产品,那就是N320,这是一款性能非常强悍的产品,它是可以独立进行部署的,这样就可以脱离上位机而单独运行。因为通道很多,可实现相位相干 MIMO 测试台。
三、产品参数
3.1 N320

3.1.1 产品包装
包含有:
- N320 硬件
- 各个国家标准的电源插头
- 电源适配器
- 一根以太网线
- 一块万兆网光模块
- 一块microSD
- 一根usb线

3.1.2 N320 前面板和后面板

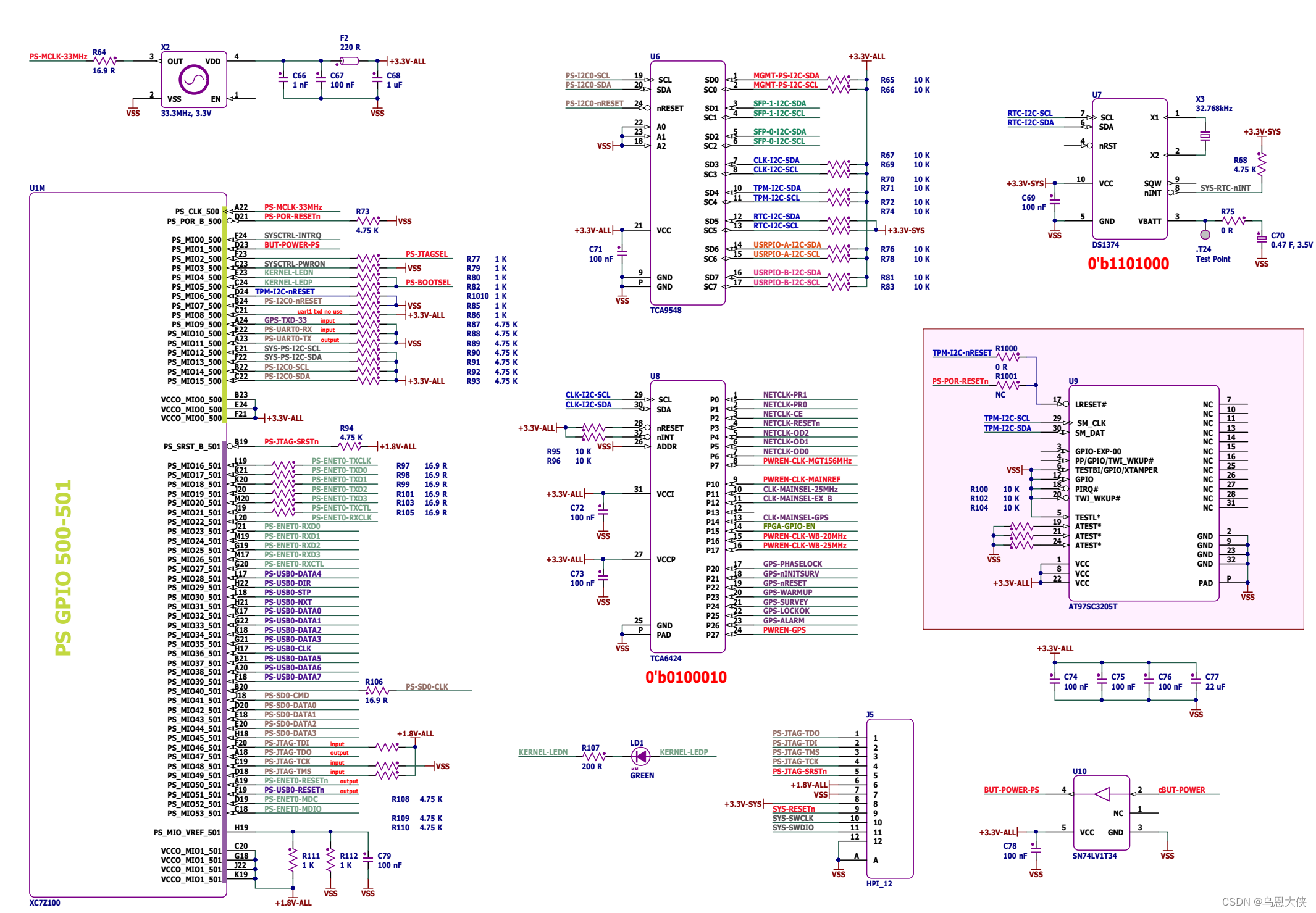
3.1.3 N320 母版的 原理图


3.1.4 N320 射频子板的 原理图


3.1.5 N320 性能指标参数(写招标文件的可以直接抄这段)
3.1.5.1 型号参数
| 项目 | 指标 | 备注 |
|---|---|---|
| 频率范围 | 3 MHz – 6 GHz | 一体机 |
| 收发通道 | 2 X 2 | 一体机 |
| 带宽范围 | 200M | 每通道 |
| 是否支持GPSDO | 内部已经包含有GPSDO了 | 时钟精度更加准确 |
| 主控芯片型号 | Xilinx Zynq-7100 FPGA SoC | 很强 |
| 射频前端 ADC | 14位 | 100 MS/s |
| 射频前端 DAC | 16位 | 400 MS/s |
| 可配置的主时钟频率 | 200, 245.76, 250 MS/s | 三个 |
| FPGA编程是否支持 | 用 Vivado 进行编程,LabVIEW FPGA不支持的哦 | |
| 支持外部时钟源 | PPS参考信号 和 10Mhz时钟信号 | 用CDA-2990 就可以让多台 时钟同步的、本身也可以输出源 |
| 10 MHz 参考时钟 | 输入 0 to 10 dBm | 注意范围 |
| PPS信号 | 输入 3.3 to 5Vpp | 注意范围 |
| 供电 | 12V-7A 60 - 75W | 电源 |
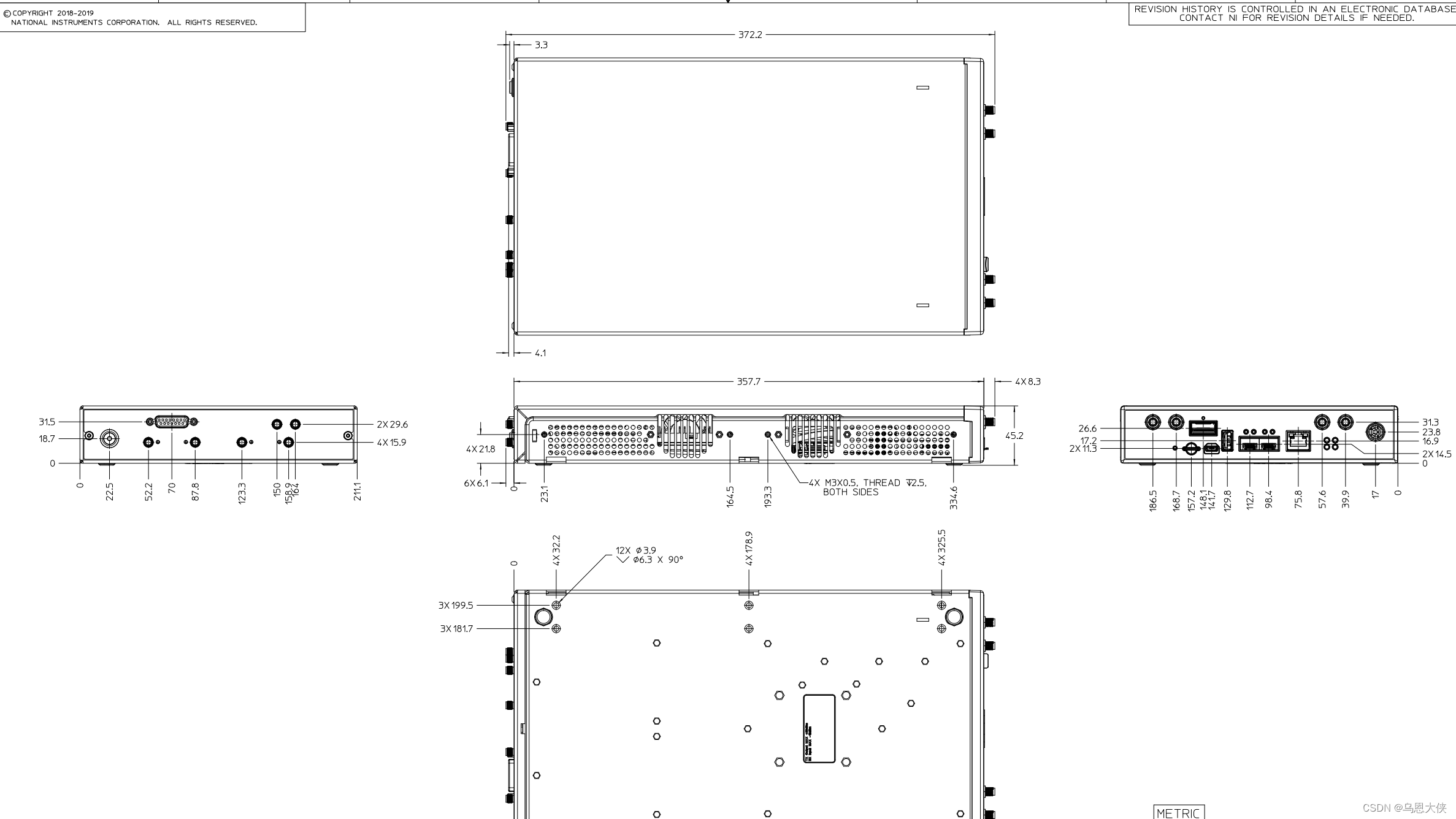
3.1.5.2 物理尺寸 外壳详细指南
| 项目 | 范围 |
|---|---|
| 长宽高 | 35.71 cm × 21.11 cm × 4.37 cm |
| 重量 | 3.13 kg |
3.1.5.3 环境要求
| 操作 | 温度 |
|---|---|
| 操作温度范围 | 0 to 50 °C |
| 贮存温度范围 | -40 to 70 °C |
| 湿度范围 | 10% to 90% |
3.1.6 N320 LED&端口 说明
3.1.6.1 N320 LED&端口 前面板

| LED灯 | 说明 |
|---|---|
| PWR | 电源指示灯 |
| RF 0:TX/RX SMA/LED | 说明数据正在传输中 |
| RF 0:RX2 SMA/LED | 说明数据正在传输中 |
| RF 1:TX/RX SMA/LED | 说明数据正在传输中 |
| RF 1:RX2 SMA/LED | 说明数据正在传输中 |
| LO IN:TX | TX LO 的输入端口。 支持的 LO 频率范围为 450 MHz 至 6 GHz。 不支持低于 450 MHz 的外部 LO 输入。 LO 输入信号电平应为 +5 dBm,但也可以在 +3 dBm 和 +7 dBm 之间。 |
| LO IN:RX | 子板 0 的 RX LO 输入端口。支持的 LO 频率范围为 450 MHz 至 6 GHz。 不支持低于 450 MHz 的外部 LO 输入。 LO 输入信号电平应为 +5 dBm,但也可以在 +3 dBm 和 +7 dBm 之间。 |
| GPIO | DB15 GPIO 接口。 |
GPIO
| 引脚 | 说明 |
|---|---|
| Pin 1 | +3.3V |
| Pin 2 | Data[0] |
| Pin 3 | Data[1] |
| Pin 4 | Data[2] |
| Pin 5 | Data[3] |
| Pin 6 | Data[4] |
| Pin 7 | Data[5] |
| Pin 8 | Data[6] |
| Pin 9 | Data[7] |
| Pin 10 | Data[8] |
| Pin 11 | Data[9] |
| Pin 12 | Data[10] |
| Pin 13 | Data[11] |
| Pin 14 | 0V |
| Pin 15 | 0V |
3.1.6.2 N320 LED&端口 后面板

| LED灯 | 说明 |
|---|---|
| GPS ANT | GPS 天线连接 |
| REF IN | 参考时钟输入,使用外部 10 MHz 参考时钟,方波将提供最佳相位噪声性能,但正弦波也是可以接受的。 参考时钟的功率电平不能超过+10 dBm。 |
| PPS/TRIG IN | PPS信号输入端口,使用PPS信号进行时间戳同步需要具有以下5Vpp幅度的方波信号。 |
| TRIG OUT | 导出参考时钟的输出端口 |
| PWR | USRP N320 系列电源连接器 |
| RESET | 重置设备的输入按钮 |
| MicroSD | 用于 OE Linux 文件系统的 MicroSD 卡 |
| 控制台 JTAG | Micro USB 连接器,用于板载 USB-JTAG 编程器以及 TTY 登录控制台 |
| USB 2.0 | 连接 ARM CPU 的主机 USB 连接器 |
| SFP+ | 用于以太网接口的 1/10Gb SFP+ 端口 |
| QSFP+ | 用于以太网接口的 QSFP+ 端口(2 个 10Gb 通道) |
| 10/1000/1000 | 连接 ARM CPU 的 10/100/1000 Mb 以太网接口 |
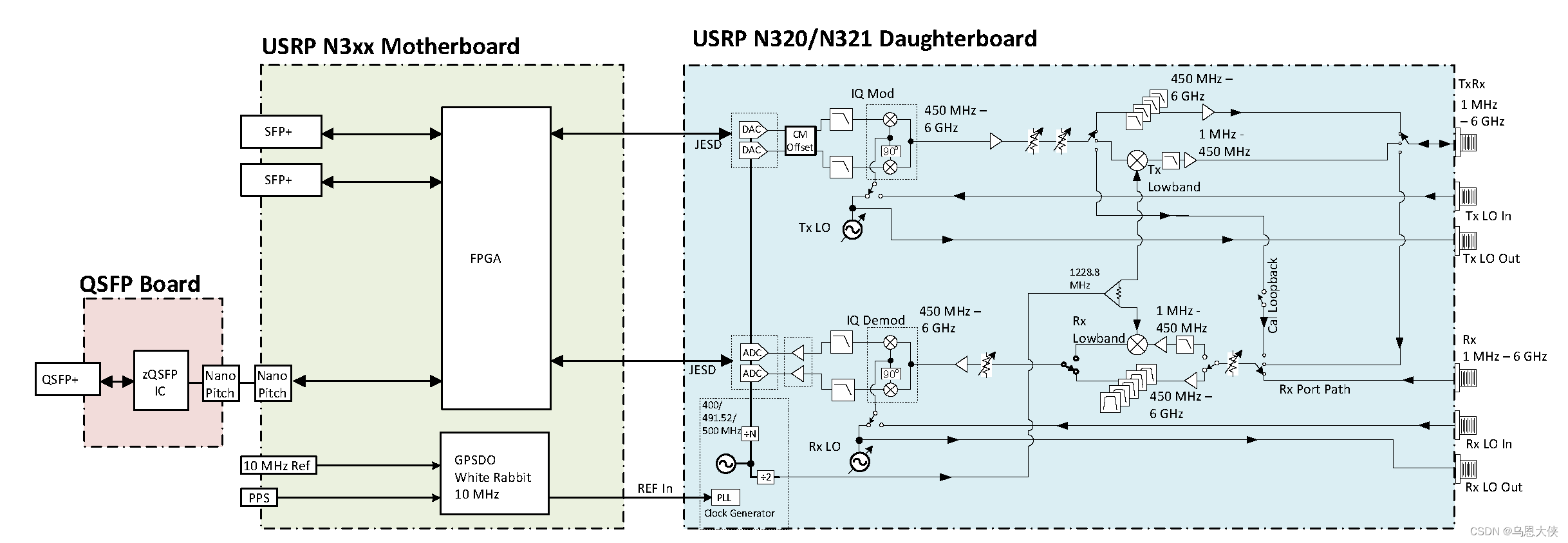
3.1. N320 系统架构图
3.2 N321

3.2.1 产品包装
包含有:
- N320 硬件
- 各个国家标准的电源插头
- 电源适配器
- 一根以太网线
- 一块万兆网光模块
- 一块microSD
- 一根usb线

3.2.2 N321 性能指标参数(写招标文件的可以直接抄这段)
3.2.2.1 型号参数
| 项目 | 指标 | 备注 |
|---|---|---|
| 频率范围 | 3 MHz – 6 GHz | 一体机 |
| 收发通道 | 2 X 2 | 一体机 |
| 带宽范围 | 200M | 每通道 |
| 是否支持GPSDO | 内部已经包含有GPSDO了 | 时钟精度更加准确 |
| 主控芯片型号 | Xilinx Zynq-7100 FPGA SoC | 很强 |
| 射频前端 ADC | 14位 | 100 MS/s |
| 射频前端 DAC | 16位 | 400 MS/s |
| 可配置的主时钟频率 | 200, 245.76, 250 MS/s | 三个 |
| FPGA编程是否支持 | 用 Vivado 进行编程,LabVIEW FPGA不支持的哦 | |
| 支持外部时钟源 | PPS参考信号 和 10Mhz时钟信号 | 用CDA-2990 就可以让多台 时钟同步的、本身也可以输出源 |
| 10 MHz 参考时钟 | 输入 0 to 10 dBm | 注意范围 |
| PPS信号 | 输入 3.3 to 5Vpp | 注意范围 |
| 供电 | 12V-7A 60 - 75W | 电源 |
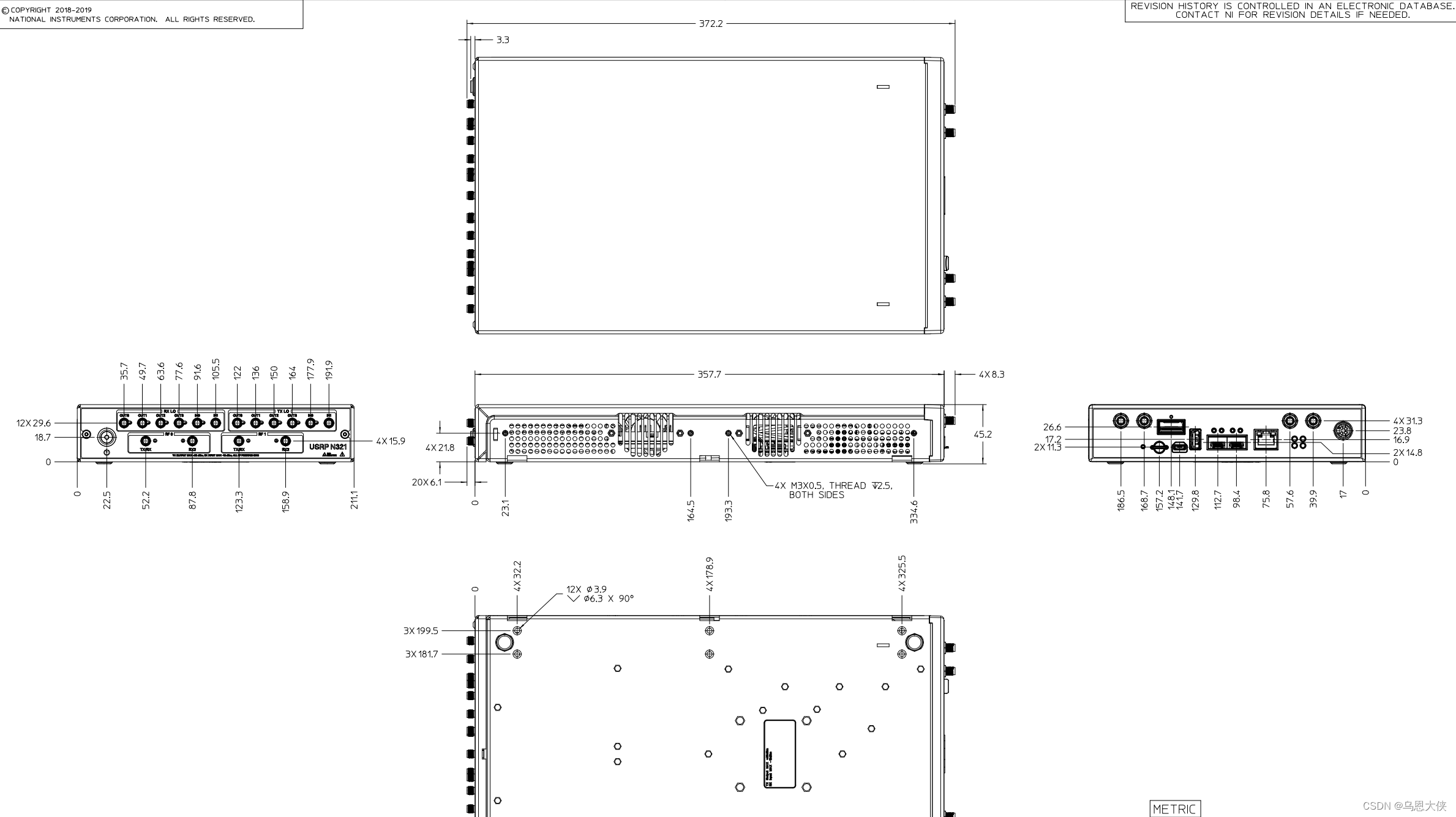
3.2.2.2 物理尺寸 外壳详细指南
| 项目 | 范围 |
|---|---|
| 长宽高 | 35.71 cm × 21.11 cm × 4.37 cm |
| 重量 | 3.13 kg |
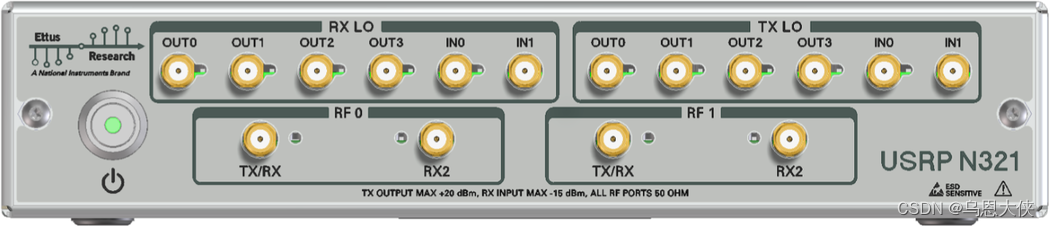
3.2.3 N321 LED&端口 说明
| LED灯 | 说明 |
|---|---|
| PWR | 电源指示灯 |
| RF 0:TX/RX SMA/LED | 说明数据正在传输中 |
| RF 0:RX2 SMA/LED | 说明数据正在传输中 |
| RF 1:TX/RX SMA/LED | 说明数据正在传输中 |
| RF 1:RX2 SMA/LED | 说明数据正在传输中 |
| TX LO:IN0 | TX LO 输入端口。 支持的 LO 频率范围为 450 MHz 至 6 GHz。 不支持低于 450 MHz 的外部 LO 输入。 LO 输入信号电平应为 +5 dBm,但也可以在 +3 dBm 和 +7 dBm 之间。 |
| TX LO:IN1 | TX LO 输入端口。 支持的 LO 频率范围为 450 MHz 至 6 GHz。 不支持低于 450 MHz 的外部 LO 输入。 LO 输入信号电平应为 +5 dBm,但也可以在 +3 dBm 和 +7 dBm 之间。 |
| TX LO:OUT0-3 | 1:4 分配器的 TX LO 输出 |
| RX LO:IN0 | 子板 0 的 RX LO 输入端口。支持的 LO 频率范围为 450 MHz 至 6 GHz。 不支持低于 450 MHz 的外部 LO 输入。 LO 输入信号电平应为 +5 dBm,但也可以在 +3 dBm 和 +7 dBm 之间。 |
| RX LO:IN1 | 子板 0 的 RX LO 输入端口。支持的 LO 频率范围为 450 MHz 至 6 GHz。 不支持低于 450 MHz 的外部 LO 输入。 LO 输入信号电平应为 +5 dBm,但也可以在 +3 dBm 和 +7 dBm 之间。 |
| RX LO:OUT0-3 | 1:4 分配器的 RX LO 输出 |

| LED灯 | 说明 |
|---|---|
| GPS ANT | GPS 天线连接 |
| REF IN | 参考时钟输入,使用外部 10 MHz 参考时钟,方波将提供最佳相位噪声性能,但正弦波也是可以接受的。 参考时钟的功率电平不能超过+10 dBm。 |
| PPS/TRIG IN | PPS信号输入端口,使用PPS信号进行时间戳同步需要具有以下5Vpp幅度的方波信号。 |
| TRIG OUT | 导出参考时钟的输出端口 |
| PWR | USRP N320 系列电源连接器 |
| RESET | 重置设备的输入按钮 |
| MicroSD | 用于 OE Linux 文件系统的 MicroSD 卡 |
| 控制台 JTAG | Micro USB 连接器,用于板载 USB-JTAG 编程器以及 TTY 登录控制台 |
| USB 2.0 | 连接 ARM CPU 的主机 USB 连接器 |
| SFP+ | 用于以太网接口的 1/10Gb SFP+ 端口 |
| QSFP+ | 用于以太网接口的 QSFP+ 端口(2 个 10Gb 通道) |
| 10/1000/1000 | 连接 ARM CPU 的 10/100/1000 Mb 以太网接口 |
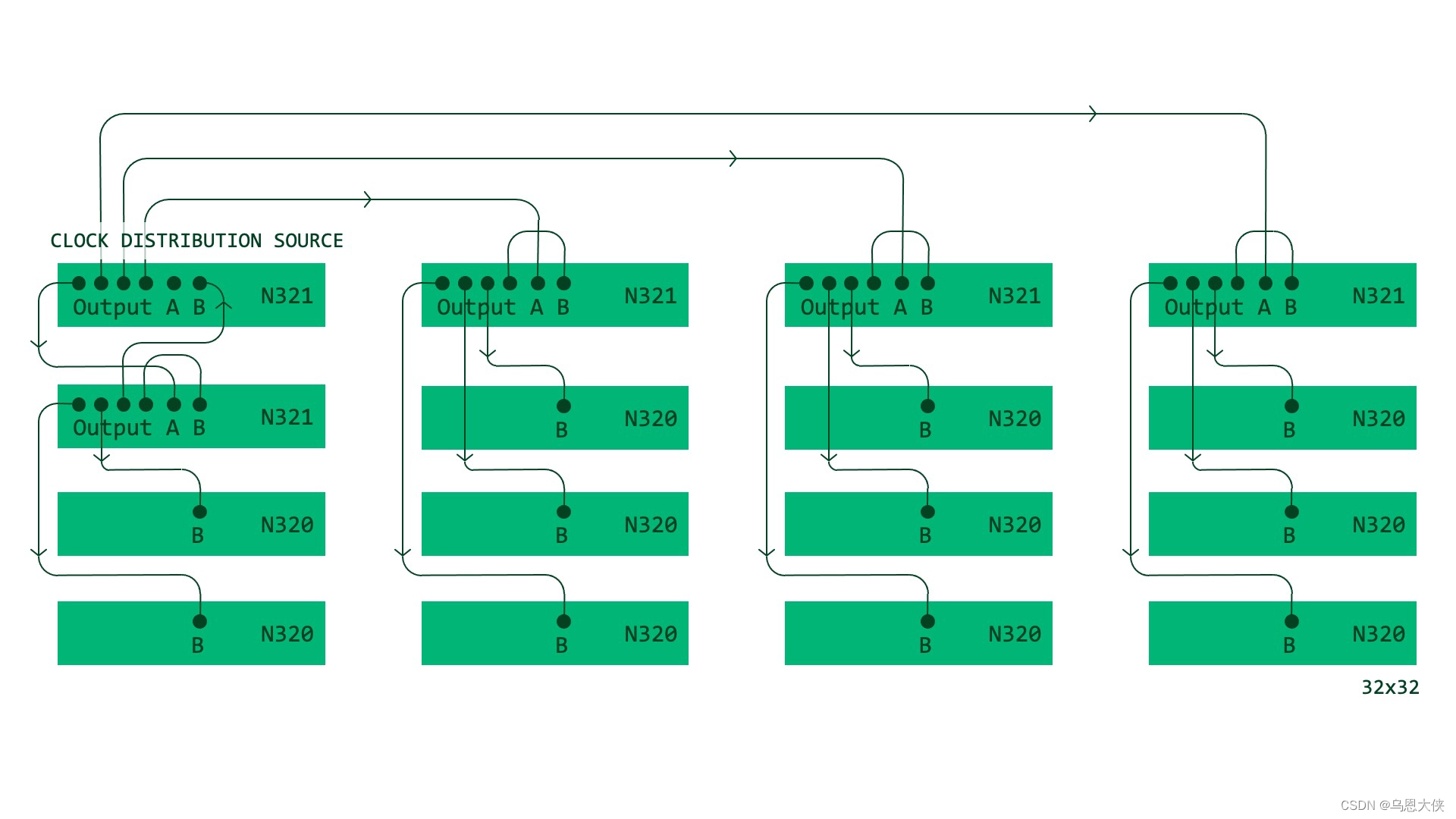
3.2.4 N321 多台级联 多通道同步
许多应用需要具有不同同步级别的多输入多输出(MIMO)配置。一些MIMO系统只需要共享时钟来用于ADC和DAC;而其他系统则需要每个通道被锁定到一个通用时钟和本地振荡器以实现全相位相干运行。
常见的MIMO应用适用于使用空间多路复用的通信。因为这只需要时钟同步,大多数USRP有一个外部的10 MHz参考时钟就足够了。 有一款这样的系统是由布里斯托大学和隆德大学合作打造的,他们使用基于SDR的大规模MIMO系统打破了无线频谱效率的世界纪录。 在此应用中使用的大规模MIMO原型验证系统是由使用板载FPGA的NI USRP软件无线电设备组成的。
当需要全相位相干运行时,您有两种可以考虑的选择。如果您需要最多四个通道的仅接收操作,具有两个TwinRx子板的Ettus Research USRP X310可以设置为共享LO并以相位相干的方式运行。如果需要超过四个通道,则可以考虑一下图7中所示的Ettus Research USRP N320和N321。USRP N321配备了内置LO分布硬件,允许最高128 x 128相位相干运行:图8显示了一个32 x 32配置示例。
全系列 检索列表
【USRP】产品型号、参数、架构全解析系列 1:B200 / B210 / B200mini / B205mini
【USRP】产品型号、参数、架构全解析系列 2:E310 / E312 / E313
【USRP】产品型号、参数、架构全解析系列 3:E320
【USRP】产品型号、参数、架构全解析系列 4:N200 / N210
【USRP】产品型号、参数、架构全解析系列 5:N300 / N310
【USRP】产品型号、参数、架构全解析系列 6:N320 / N321
【USRP】产品型号、参数、架构全解析系列 7:X300 / X310
【USRP】产品型号、参数、架构全解析系列 8:USRP-2974
【USRP】产品型号、参数、架构全解析系列 9:X410
【USRP】产品型号、参数、架构全解析系列 10:X440
USRP 调制解调系列连载
【USRP】调制解调系列1:AM、FM解调
【USRP】调制解调系列2:2ASK、4ASK,基于labview的实现
【USRP】调制解调系列3:2FSK、4FSK、8FSK,基于labview的实现
【USRP】调制解调系列4:BPSK、QPSK、8PSK、OQPSK、Pi/4DQPSK,基于labview的实现
【USRP】调制解调系列5:16QAM、32QAM、64QAM、256QAM、1024QAM、基于labview的实现
【USRP】调制解调系列6:16APSK、32APSK 、基于labview的实现
【USRP】调制解调系列7:GMSK、MSK、基于labview的实现
USRP 仪器 连载系列
【USRP】集成化仪器系列1 :信号源,基于labview实现
【USRP】集成化仪器系列2 :示波器,基于labview实现
【USRP】集成化仪器系列3 :频谱仪,基于labview实现
相关文章:
【USRP】产品型号、参数、架构全解析系列 6:N320 / N321
一、USRP 简介 通用软件无线电外设( USRP ) 是由 Ettus Research 及其母公司National Instruments设计和销售的一系列软件定义无线电。USRP 产品系列由Matt Ettus领导的团队开发,被研究实验室、大学和业余爱好者广泛使用。 大多数 USRP 通过以太网线连接到主机&am…...

Apifox 常用 JS 脚本
前置脚本常用 1、时间戳生成(秒级): // 1、生成秒级时间戳到全局变量中 //let timestamp parseInt(new Date().getTime() / 1000) //pm.globals.set(timestamp, timestamp) // 2、生成秒级时间戳到全局变量中 pm.globals.set(timestamp, p…...

防止SQL注入的四种方案
一、什么是SQL注入? SQL注入即是指web应用程序对用户输入数据的合法性没有判断或过滤不严,攻击者可以在web应用程序中事先定义好的查询语句的结尾上添加额外的SQL语句,在管理员不知情的情况下实现非法操作,以此来实现欺骗数据库服…...

java单元测试
版本区别 特性Junit 4Junit 5在当前类的所有测试方法之前执行。注解在静态方法上。此方法可以包含一些初始化代码。BeforeClassBeforeAll在当前类中的所有测试方法之后执行。注解在静态方法上。此方法可以包含一些清理代码。AfterClassAfterAll在每个测试方法之前执行。注解在…...

【LeetCode】双指针求解和为s的两个数字
Problem: 剑指 Offer 57. 和为s的两个数字 文章目录 题目解析算法思路分析复杂度Code 题目解析 首先来讲解一下本题的思路 我们看到本题的意思很简单,就是去这个nums这个数组中进行寻找,如果找到了两个数相加之和为target的话,那构成一个结果…...

opencv识别一张图片的多个红框,并截取红框的内容
需求 需要获取图片的红框的内容,实体的图片我就不放了 获取红框 先截取获得图片的多个轮廓 import cv2 import numpy as np # 加载图像并转换为灰度图像 image cv2.imread(image6.jpg) gray cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 应用高斯模糊以减…...

数据库-事务
介绍: 事务是一组操作的集合,它是一个不可分割的工作单位,事物会把所有的操作作为一个整体一起向系统 提交或撤销操作请求,即这些操作要么同时成功,要么同时失败 操作:事务控制 开启事务:start…...

MySQL 使用开源审计插件
文章目录 前言1. 审计插件下载2. 审计插件参数2.1 server_audit_events2.2 server_audit_excl_users2.3 server_audit_output_type2.4 server_audit_file_path2.5 server_audit_file_rotate_now2.6 server_audit_file_rotate_size2.7 server_audit_file_rotations2.8 server_au…...
)
Python入门教程 | Python3 集合(Set)
Python3 集合(Set) 集合(set)是一个无序的不重复元素序列。 集合中的元素不会重复,并且可以进行交集、并集、差集等常见的集合操作。 可以使用大括号 { } 创建集合,元素之间用逗号 , 分隔, 或…...
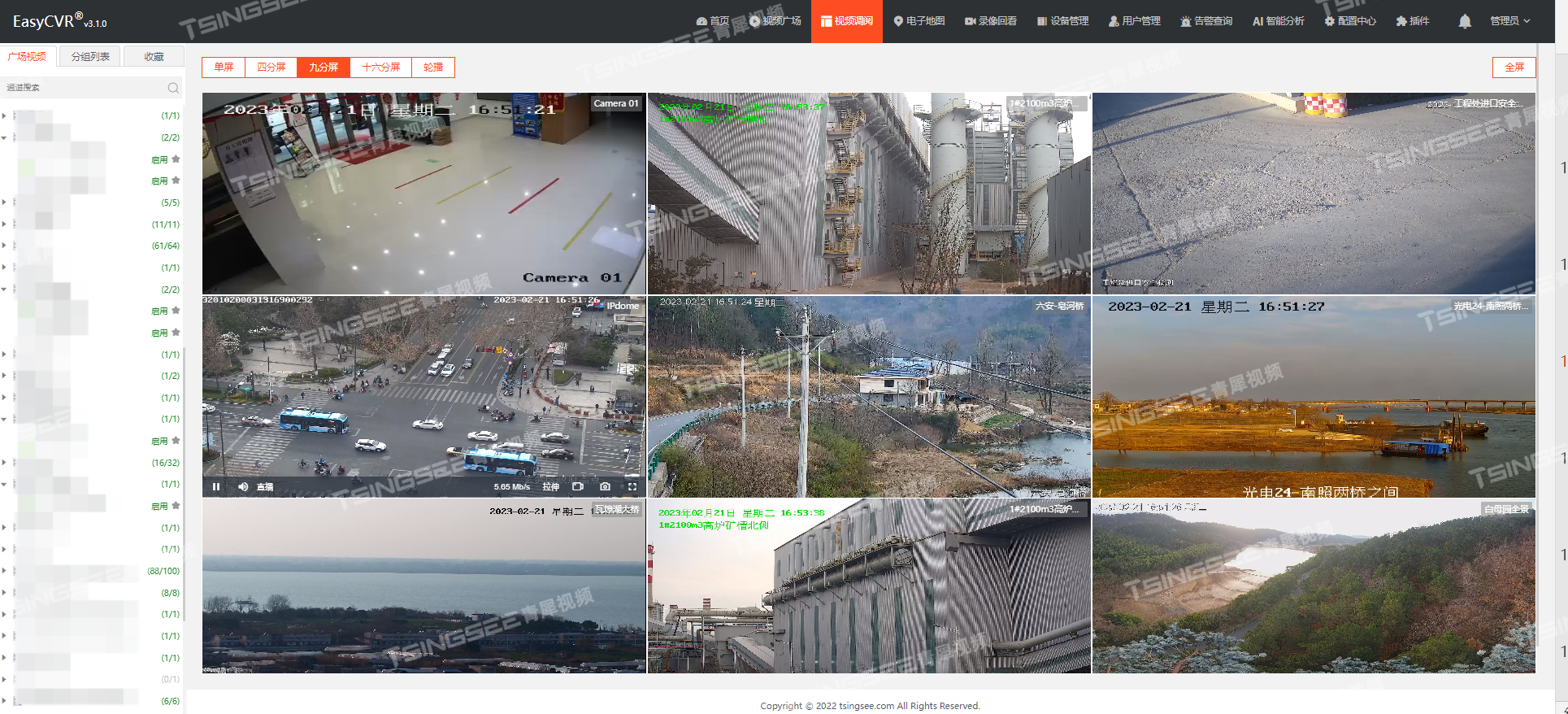
视频汇聚/视频云存储/视频监控管理平台EasyCVR安全检查的相关问题及解决方法2.0
开源EasyDarwin视频监控TSINGSEE青犀视频平台EasyCVR能在复杂的网络环境中,将分散的各类视频资源进行统一汇聚、整合、集中管理,在视频监控播放上,TSINGSEE青犀视频安防监控汇聚平台可支持1、4、9、16个画面窗口播放,可同时播放多…...

【C++模拟实现】反向迭代器的实现
【C模拟实现】反向迭代器的实现 目录 【C模拟实现】反向迭代器的实现反向迭代器的代码示例反向迭代器的模拟实现要点引入iterator模版参数rbegin()和rend()的实现 作者:爱写代码的刚子 时间:2023.9.5 前言:本篇博客主要介绍反向迭代器的实现&…...

Kubernetes技术--k8s核心技术持久化存储
有时候需要在集群中进行一些重要的数据进行持久化存储,然后需要的时候再进行挂载,那么下面我们一起来看看如何实现数据的持久化存储操作。 1.nfs网络存储 -1.找一台服务器做nfs的服务端,安装nfs。(这里我们直接在master上实现)。 这里应该找再单独的搭建一个node节点做持…...
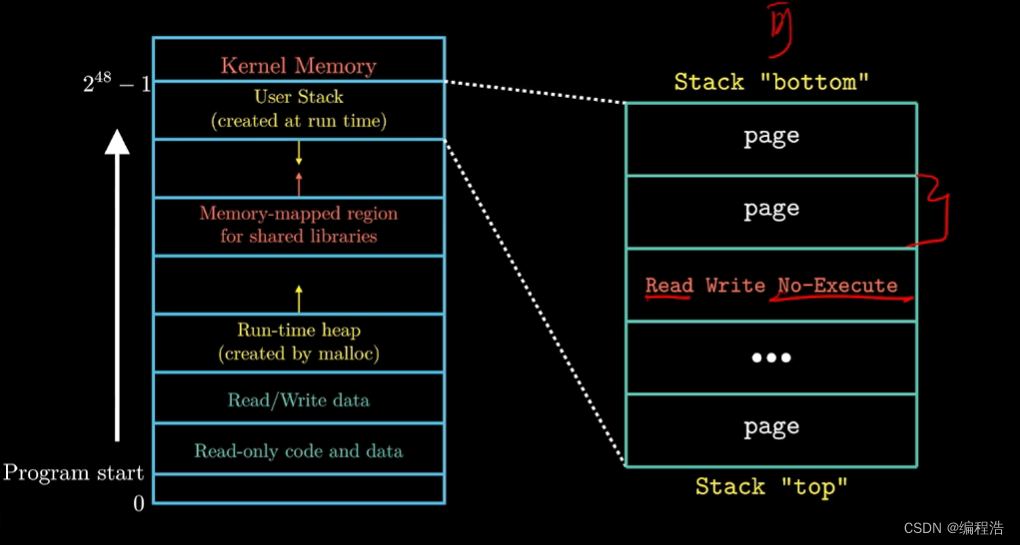
【80天学习完《深入理解计算机系统》】第十四天 复习第三章
专注 效率 记忆 预习 笔记 复习 做题 欢迎观看我的博客,如有问题交流,欢迎评论区留言,一定尽快回复!(大家可以去看我的专栏,是所有文章的目录) 文章字体风格: 红色文字表示&#…...

库中是如何实现string类的?
🎈个人主页:🎈 :✨✨✨初阶牛✨✨✨ 🐻推荐专栏1: 🍔🍟🌯C语言初阶 🐻推荐专栏2: 🍔🍟🌯C语言进阶 🔑个人信条: 🌵知行合一 …...

无涯教程-JavaScript - WORKDAY.INTL函数
描述 WORKDAY.INTL函数返回带有自定义周末参数的指定工作日数之前或之后的日期的序列号。周末参数指示哪些和多少天是周末。周末和指定为假期的任何日子均不视为工作日。 语法 WORKDAY.INTL (start_date, days, [weekend], [holidays])争论 Argument描述Required/OptionalS…...
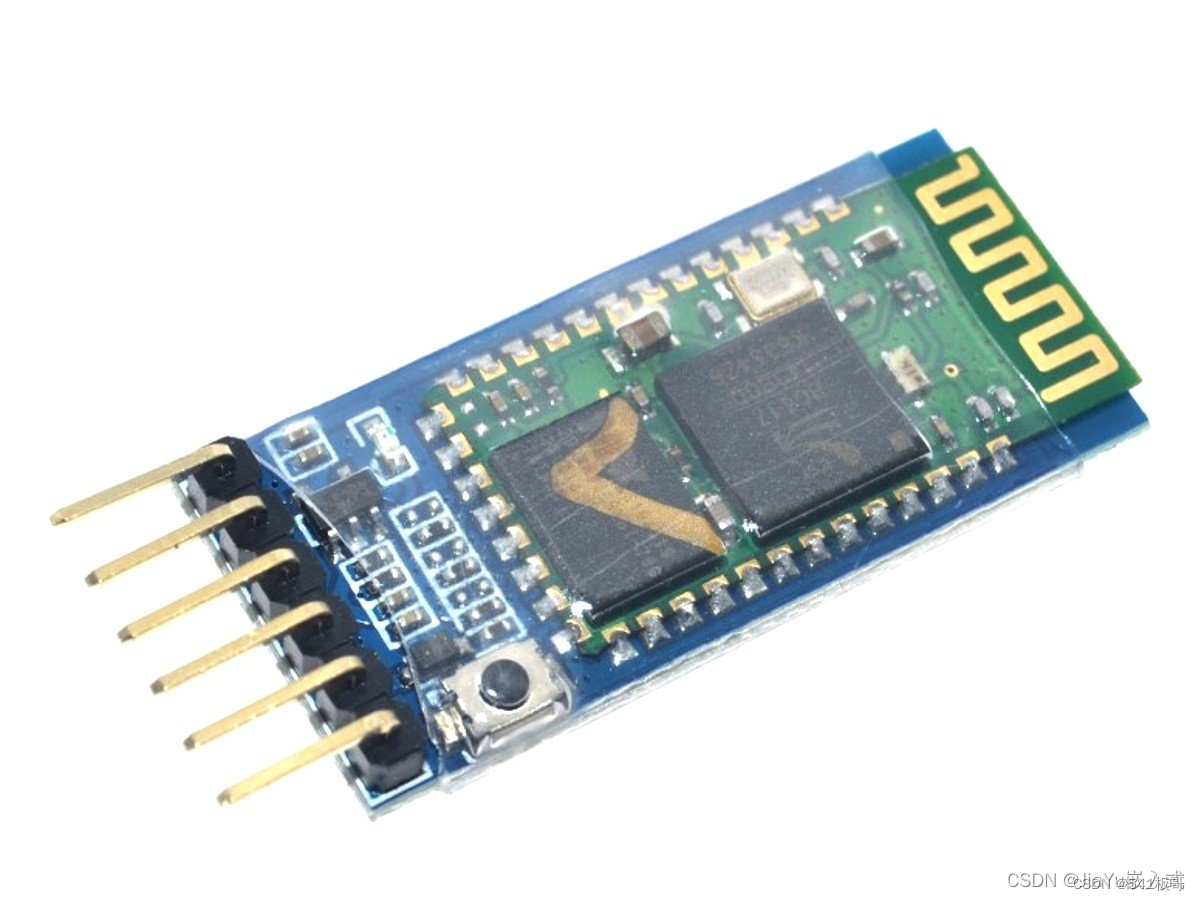
STM32--蓝牙
本文主要介绍基于STM32F103C8T6和蓝牙模块实现的交互控制 简介 蓝牙(Bluetooth)是一种用于无线通信的技术标准,允许设备在短距离内进行数据交换和通信。它是由爱立信(Ericsson)公司在1994年推出的,以取代…...

java 实现原型模式
原型模式(Prototype Pattern)是一种创建型设计模式,它允许创建对象的副本,而无需暴露对象的创建细节。在Java中,原型模式通常通过克隆对象来实现。要实现原型模式,需要满足以下条件: 被克隆的对…...
maven本地安装jar包install-file,解决没有pom的问题
背景: 公司因为权限问题,没有所有的代码,内部maven还在搭建,所以需要拿到同事的jar包,本地install: mvn install:install-file -DgroupIdcom..framework -DartifactIdcloud-api -Dversion1.0.0-SNAPSHOT …...
【C++学习笔记】5、变量作用域
文章目录 【 1、局部变量 】【 2、全局变量 】【 3、局部变量和全局变量的初始化 】 作用域是程序的一个区域,一般来说有三个地方可以定义变量: 在函数或一个代码块内部声明的变量,称为局部变量。 在函数参数的定义中声明的变量,称…...

Python中的装饰器
迷途小书童的 Note 读完需要 5分钟 速读仅需 2 分钟 装饰器是一个非常有用而又常被误解的功能,可以让我们在不修改函数或类的源代码情况下给它们提供扩展功能。本文将通过具体示例带你深入理解 Python 装饰器的用法。 1 装饰器基础 装饰器本质上是一个函数ÿ…...

mRNA疫苗序列生物信息学分析:从密码子优化到免疫原性预测
1. 项目概述:解码两大mRNA疫苗的“核心蓝图”作为一名在生物信息学和基因组学领域摸爬滚打了十多年的“老码农”,我见过太多令人兴奋的数据集,但当我第一次在GitHub上看到这个名为“Assemblies-of-putative-SARS-CoV2-spike-encoding-mRNA-se…...

LLM Notebooks:从零构建RAG问答系统的实践指南
1. 项目概述:一个面向大语言模型实践的“笔记本”仓库最近在GitHub上闲逛,发现了一个挺有意思的仓库,叫qianniuspace/llm_notebooks。光看名字,llm_notebooks,大语言模型笔记本,这指向性就非常明确了。这大…...

LVGUI字体瘦身实战:如何为你的IoT设备定制一个超小的中文字体库
LGVUI字体瘦身实战:为IoT设备定制超小中文字体库的工程化解决方案 在嵌入式物联网设备开发中,每一KB的Flash和RAM都弥足珍贵。当你的智能温控器需要显示"当前温度:25℃"或者电子秤要呈现"净重:0.5kg"时&#…...

Free-NTFS-for-Mac深度剖析:打破macOS与Windows文件系统壁垒的完整解决方案
Free-NTFS-for-Mac深度剖析:打破macOS与Windows文件系统壁垒的完整解决方案 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mountin…...

qmcdump:专业解决QQ音乐加密音频格式兼容性问题
qmcdump:专业解决QQ音乐加密音频格式兼容性问题 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 在数字音乐时…...

Emacs AI编程助手:ai-code-interface.el深度集成指南
1. 项目概述:一个为Emacs注入AI灵魂的代码接口如果你是一位Emacs的深度用户,同时又对AI辅助编程抱有极大的热情,那么你很可能已经厌倦了在浏览器、终端和编辑器之间反复横跳的割裂体验。tninja/ai-code-interface.el这个项目,正是…...

本地化AI代码助手LLMDog:模块化框架与开源模型集成实践
1. 项目概述:一个为开发者设计的本地化AI代码助手最近在GitHub上闲逛,发现了一个挺有意思的项目叫“LLMDog”,作者是doganarif。乍一看这个名字,可能会联想到“AI狗”或者某种宠物,但它的全称其实是“Large Language M…...

基于树莓派与QT Py的本地化物联网红外遥控器DIY指南
1. 项目概述与核心价值想没想过,把家里那堆遥控器——电视的、机顶盒的、空调的、音响的——统统集成到一个你手机能打开的网页里?而且这个控制中心完全在你家局域网里运行,不依赖任何云服务,不用担心厂商倒闭后设备变砖。今天分享…...

LC正弦波振荡器原理、设计与调试:从巴克豪森判据到电路实战
1. 从直流到交流:正弦波振荡器的核心价值与分类在电子电路的世界里,我们常常需要将稳定的直流电源,转换成特定频率和幅度的交流信号。这个看似“无中生有”的过程,正是正弦波振荡器的核心使命。无论是你手机里的无线通信模块、收音…...

从二维到三维:DIY LED视频立方体构建全攻略
1. 项目概述:从平面到立体的视觉革命几年前,当我第一次成功点亮一整面由32x32 RGB LED面板组成的视频墙时,那种由1024个像素点共同编织出的动态画面所带来的震撼,至今记忆犹新。但作为一个热衷于将技术推向边界的创作者࿰…...