嵌入式Linux驱动开发(LCD屏幕专题)(三)
1. 硬件相关的操作
LCD驱动程序的核心就是:
- 分配fb_info
- 设置fb_info
- 注册fb_info
- 硬件相关的设置
硬件相关的设置又可以分为3部分:
- 引脚设置
- 时钟设置
- LCD控制器设置
2. 在设备树里指定LCD参数
framebuffer-mylcd {compatible = "100ask,lcd_drv";pinctrl-names = "default";pinctrl-0 = <&mylcd_pinctrl>;backlight-gpios = <&gpio1 8 GPIO_ACTIVE_HIGH>;clocks = <&clks IMX6UL_CLK_LCDIF_PIX>,<&clks IMX6UL_CLK_LCDIF_APB>;clock-names = "pix", "axi";display = <&display0>;display0: display {bits-per-pixel = <24>;bus-width = <24>;display-timings {native-mode = <&timing0>;timing0: timing0_1024x768 {clock-frequency = <50000000>;hactive = <1024>;vactive = <600>;hfront-porch = <160>;hback-porch = <140>;hsync-len = <20>;vback-porch = <20>;vfront-porch = <12>;vsync-len = <3>;hsync-active = <0>;vsync-active = <0>;de-active = <1>;pixelclk-active = <0>;};};}; };
3. 编程
3.1 从设备树获得参数
时序参数、引脚极性等信息,都被保存在一个display_timing结构体里:
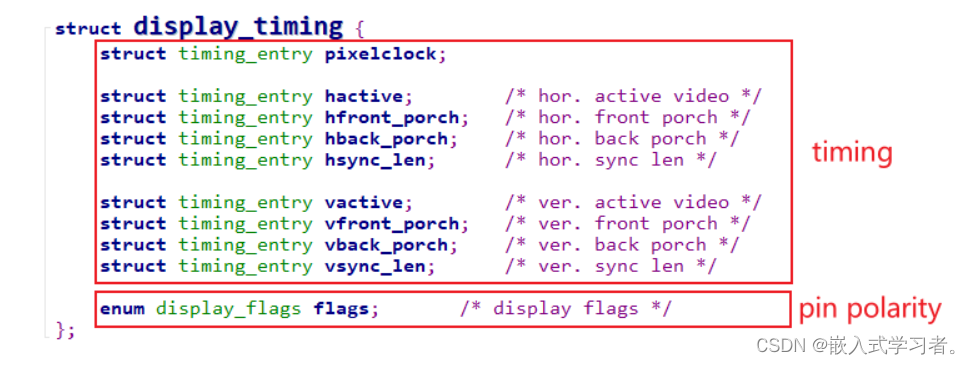
参考内核文件:
drivers\video\of_display_timing.cdrivers\video\fbdev\mxsfb.c
3.2 使用参数配置LCD控制器
根据芯片手册,一个一个设置寄存器:
- Framebuffer地址设置
- Framebuffer中数据格式设置
- LCD时序参数设置
- LCD引脚极性设置
4.上机实验
1. 要做的事情
-
去除内核自带的驱动程序
-
加入我们编写的驱动程序、设备树文件
-
重新编译内核、设备树
-
上机测试:使用编译出来的内核、设备树启动板子
2. 去除内核自带的驱动程序
修改内核文件:drivers/video/fbdev/Makefile,把内核自带驱动程序mxsfb.c对应的那行注释掉,如下:
#obj-$(CONFIG_FB_MXS) += mxsfb.o
3. 加入新驱动程序、设备树
-
复制驱动程序:
- 把
11_lcd_drv_imx6ull_ok\lcd_drv.c放到内核源码目录drivers/video/fbdev - 备份内核自带设备树文件:
arch/arm/boot/dts/100ask_imx6ull-14x14.dts - 把
11_lcd_drv_imx6ull_ok\100ask_imx6ull-14x14.dts放到内核源码目录arch/arm/boot/dts/
- 把
-
修改内核文件:
- 修改:
drivers/video/fbdev/Makefile,使用我们提供的lcd_drv.c,如下:
- 修改:
#obj-$(CONFIG_FB_MXS) += mxsfb.o
obj-$(CONFIG_FB_MXS) += lcd_drv.o
4. 重新编译内核、设备树
以下命令在Ubuntu中执行。
- 设置工具链
export ARCH=armexport CROSS_COMPILE=arm-linux-gnueabihf-export PATH=$PATH:/home/book/100ask_imx6ull-sdk/ToolChain/gcc-linaro-6.2.1-2016.11-x86_64_arm-linux-gnueabihf/bin
- 配置、编译
book@100ask:~/100ask_imx6ull-sdk$ cd Linux-4.9.88book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make 100ask_imx6ull_defconfig book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make zImage book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make dtbs
-
得到
- 内核:
arch/arm/boot/zImage - 设备树文件:
arch/arm/boot/dts/100ask_imx6ull-14x14.dtb
- 内核:
-
复制到NFS目录:
$ cp arch/arm/boot/zImage ~/nfs_rootfs/$ cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/
5. 上机测试
以下命令在开发板中执行。
-
挂载NFS
-
vmware使用NAT(假设windowsIP为192.168.1.100)
[root@100ask:~]# mount -t nfs -o nolock,vers=3,port=2049,mountport=9999 192.168.1.100:/home/book/nfs_rootfs /mnt -
vmware使用桥接,或者不使用vmware而是直接使用服务器:假设Ubuntu IP为192.168.1.137
[root@100ask:~]# mount -t nfs -o nolock,vers=3 192.168.1.137:/home/book/nfs_rootfs /mnt
-
-
更新单板文件
[root@100ask:~]# cp /mnt/zImage /boot[root@100ask:~]# cp /mnt/100ask_imx6ull-14x14.dtb /boot[root@100ask:~]# sync
-
重启开发板观察现象
- 如果可以看到企鹅LOGO,就表示正常
- 如果在终端中可以查看到存在
/dev/fb0节点,也表示正常
-
解决BUG
-
现象:LCD上没有企鹅LOGO,在终端中执行
ls -l /dev/fb0发现没有设备节点 -
观察内核启动信息,看到:
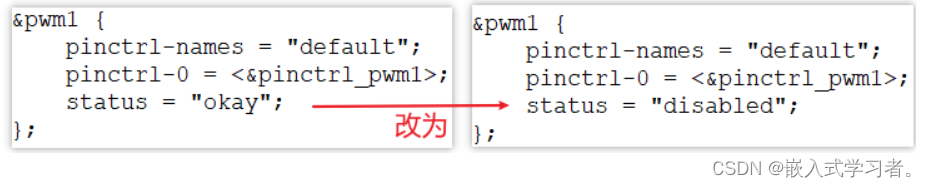
[ 0.619880] imx6ul-pinctrl 20e0000.iomuxc: pin MX6UL_PAD_GPIO1_IO08 already requested by 2080000.pwm; cannot claim for 21c8000.framebuffer-mylcd [ 0.619920] imx6ul-pinctrl 20e0000.iomuxc: pin-31 (21c8000.framebuffer-mylcd) status -22 [ 0.619954] imx6ul-pinctrl 20e0000.iomuxc: could not request pin 31 (MX6UL_PAD_GPIO1_IO08) from group mylcd_pingrp on device 20e0000.iomuxc [ 0.619985] mylcd 21c8000.framebuffer-mylcd: Error applying setting, reverse things back [ 0.620070] mylcd: probe of 21c8000.framebuffer-mylcd failed with error -22 -
原因:引脚冲突
- 设备树中pwm节点、framebuffer-mylcd节点,都使用到的同一个引脚:PAD_GPIO1_IO08
-
解决方法:修改
arch/arm/boot/dts/100ask_imx6ull-14x14.dts,禁止pwm节点,如下:
-
6、代码
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/err.h>
#include <linux/errno.h>
#include <linux/string.h>
#include <linux/mm.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/fb.h>
#include <linux/init.h>
#include <linux/dma-mapping.h>
#include <linux/interrupt.h>
#include <linux/platform_device.h>
#include <linux/clk.h>
#include <linux/cpufreq.h>
#include <linux/io.h>
#include <video/display_timing.h>
#include <video/of_display_timing.h>
#include <linux/gpio/consumer.h>
#include <asm/div64.h>
#include <asm/mach/map.h>struct imx6ull_lcdif {volatile unsigned int CTRL; volatile unsigned int CTRL_SET; volatile unsigned int CTRL_CLR; volatile unsigned int CTRL_TOG; volatile unsigned int CTRL1; volatile unsigned int CTRL1_SET; volatile unsigned int CTRL1_CLR; volatile unsigned int CTRL1_TOG; volatile unsigned int CTRL2; volatile unsigned int CTRL2_SET; volatile unsigned int CTRL2_CLR; volatile unsigned int CTRL2_TOG; volatile unsigned int TRANSFER_COUNT; unsigned char RESERVED_0[12];volatile unsigned int CUR_BUF; unsigned char RESERVED_1[12];volatile unsigned int NEXT_BUF; unsigned char RESERVED_2[12];volatile unsigned int TIMING; unsigned char RESERVED_3[12];volatile unsigned int VDCTRL0; volatile unsigned int VDCTRL0_SET; volatile unsigned int VDCTRL0_CLR; volatile unsigned int VDCTRL0_TOG; volatile unsigned int VDCTRL1; unsigned char RESERVED_4[12];volatile unsigned int VDCTRL2; unsigned char RESERVED_5[12];volatile unsigned int VDCTRL3; unsigned char RESERVED_6[12];volatile unsigned int VDCTRL4; unsigned char RESERVED_7[12];volatile unsigned int DVICTRL0; unsigned char RESERVED_8[12];volatile unsigned int DVICTRL1; unsigned char RESERVED_9[12];volatile unsigned int DVICTRL2; unsigned char RESERVED_10[12];volatile unsigned int DVICTRL3; unsigned char RESERVED_11[12];volatile unsigned int DVICTRL4; unsigned char RESERVED_12[12];volatile unsigned int CSC_COEFF0; unsigned char RESERVED_13[12];volatile unsigned int CSC_COEFF1; unsigned char RESERVED_14[12];volatile unsigned int CSC_COEFF2; unsigned char RESERVED_15[12];volatile unsigned int CSC_COEFF3; unsigned char RESERVED_16[12];volatile unsigned int CSC_COEFF4; unsigned char RESERVED_17[12];volatile unsigned int CSC_OFFSET; unsigned char RESERVED_18[12];volatile unsigned int CSC_LIMIT; unsigned char RESERVED_19[12];volatile unsigned int DATA; unsigned char RESERVED_20[12];volatile unsigned int BM_ERROR_STAT; unsigned char RESERVED_21[12];volatile unsigned int CRC_STAT; unsigned char RESERVED_22[12];volatile unsigned int STAT; unsigned char RESERVED_23[76];volatile unsigned int THRES; unsigned char RESERVED_24[12];volatile unsigned int AS_CTRL; unsigned char RESERVED_25[12];volatile unsigned int AS_BUF; unsigned char RESERVED_26[12];volatile unsigned int AS_NEXT_BUF; unsigned char RESERVED_27[12];volatile unsigned int AS_CLRKEYLOW; unsigned char RESERVED_28[12];volatile unsigned int AS_CLRKEYHIGH; unsigned char RESERVED_29[12];volatile unsigned int SYNC_DELAY;
} ;struct lcd_regs {volatile unsigned int fb_base_phys;volatile unsigned int fb_xres;volatile unsigned int fb_yres;volatile unsigned int fb_bpp;
};static struct lcd_regs *mylcd_regs;
static struct fb_info *myfb_info;
static unsigned int pseudo_palette[16];static struct gpio_desc *bl_gpio;
static struct clk* clk_pix;
static struct clk* clk_axi;static void lcd_controller_enable(struct imx6ull_lcdif *lcdif)
{lcdif->CTRL |= (1<<0);
}static int lcd_controller_init(struct imx6ull_lcdif *lcdif, struct display_timing *dt, int lcd_bpp, int fb_bpp, unsigned int fb_phy)
{int lcd_data_bus_width;int fb_width;int vsync_pol = 0;int hsync_pol = 0;int de_pol = 0;int clk_pol = 0;if (dt->flags & DISPLAY_FLAGS_HSYNC_HIGH)hsync_pol = 1;if (dt->flags & DISPLAY_FLAGS_VSYNC_HIGH)vsync_pol = 1;if (dt->flags & DISPLAY_FLAGS_DE_HIGH)de_pol = 1;if (dt->flags & DISPLAY_FLAGS_PIXDATA_POSEDGE)clk_pol = 1;if (lcd_bpp == 24)lcd_data_bus_width = 0x3;else if (lcd_bpp == 18)lcd_data_bus_width = 0x2;else if (lcd_bpp == 8)lcd_data_bus_width = 0x1;else if (lcd_bpp == 16)lcd_data_bus_width = 0x0;elsereturn -1;if (fb_bpp == 24 || fb_bpp == 32)fb_width = 0x3;else if (fb_bpp == 18)fb_width = 0x2;else if (fb_bpp == 8)fb_width = 0x1;else if (fb_bpp == 16)fb_width = 0x0;elsereturn -1;/* * 初始化LCD控制器的CTRL寄存器* [19] : 1 : DOTCLK和DVI modes需要设置为1 * [17] : 1 : 设置为1工作在DOTCLK模式* [15:14] : 00 : 输入数据不交换(小端模式)默认就为0,不需设置* [13:12] : 00 : CSC数据不交换(小端模式)默认就为0,不需设置* [11:10] : 11 : 数据总线为24bit* [9:8] 根据显示屏资源文件bpp来设置:8位0x1 , 16位0x0 ,24位0x3* [5] : 1 : 设置elcdif工作在主机模式* [1] : 0 : 24位数据均是有效数据,默认就为0,不需设置*/ lcdif->CTRL = (0<<30) | (0<<29) | (0<<28) | (1<<19) | (1<<17) | (lcd_data_bus_width << 10) |\(fb_width << 8) | (1<<5);/** 设置ELCDIF的寄存器CTRL1* 根据bpp设置,bpp为24或32才设置* [19:16] : 111 :表示ARGB传输格式模式下,传输24位无压缩数据,A通道不用传输)*/ if(fb_bpp == 24 || fb_bpp == 32){ lcdif->CTRL1 &= ~(0xf << 16); lcdif->CTRL1 |= (0x7 << 16); }elselcdif->CTRL1 |= (0xf << 16); /** 设置ELCDIF的寄存器TRANSFER_COUNT寄存器* [31:16] : 垂直方向上的像素个数 * [15:0] : 水平方向上的像素个数*/lcdif->TRANSFER_COUNT = (dt->vactive.typ << 16) | (dt->hactive.typ << 0);/** 设置ELCDIF的VDCTRL0寄存器* [29] 0 : VSYNC输出 ,默认为0,无需设置* [28] 1 : 在DOTCLK模式下,设置1硬件会产生使能ENABLE输出* [27] 0 : VSYNC低电平有效 ,根据屏幕配置文件将其设置为0* [26] 0 : HSYNC低电平有效 , 根据屏幕配置文件将其设置为0* [25] 1 : DOTCLK下降沿有效 ,根据屏幕配置文件将其设置为1* [24] 1 : ENABLE信号高电平有效,根据屏幕配置文件将其设置为1* [21] 1 : 帧同步周期单位,DOTCLK mode设置为1* [20] 1 : 帧同步脉冲宽度单位,DOTCLK mode设置为1* [17:0] : vysnc脉冲宽度 */lcdif->VDCTRL0 = (1 << 28)|( vsync_pol << 27)\|( hsync_pol << 26)\|( clk_pol << 25)\|( de_pol << 24)\|(1 << 21)|(1 << 20)|( dt->vsync_len.typ << 0);/** 设置ELCDIF的VDCTRL1寄存器* 设置垂直方向的总周期:上黑框tvb+垂直同步脉冲tvp+垂直有效高度yres+下黑框tvf*/ lcdif->VDCTRL1 = dt->vback_porch.typ + dt->vsync_len.typ + dt->vactive.typ + dt->vfront_porch.typ; /** 设置ELCDIF的VDCTRL2寄存器* [18:31] : 水平同步信号脉冲宽度* [17: 0] : 水平方向总周期* 设置水平方向的总周期:左黑框thb+水平同步脉冲thp+水平有效高度xres+右黑框thf*/ lcdif->VDCTRL2 = (dt->hsync_len.typ << 18) | (dt->hback_porch.typ + dt->hsync_len.typ + dt->hactive.typ + dt->hfront_porch.typ);/** 设置ELCDIF的VDCTRL3寄存器* [27:16] :水平方向上的等待时钟数 =thb + thp* [15:0] : 垂直方向上的等待时钟数 = tvb + tvp*/ lcdif->VDCTRL3 = ((dt->hback_porch.typ + dt->hsync_len.typ) << 16) | (dt->vback_porch.typ + dt->vsync_len.typ);/** 设置ELCDIF的VDCTRL4寄存器* [18] 使用VSHYNC、HSYNC、DOTCLK模式此为置1* [17:0] : 水平方向的宽度*/ lcdif->VDCTRL4 = (1<<18) | (dt->hactive.typ);/** 设置ELCDIF的CUR_BUF和NEXT_BUF寄存器* CUR_BUF : 当前显存地址* NEXT_BUF : 下一帧显存地址* 方便运算,都设置为同一个显存地址*/ lcdif->CUR_BUF = fb_phy;lcdif->NEXT_BUF = fb_phy;return 0;
}/* from pxafb.c */
static inline unsigned int chan_to_field(unsigned int chan,struct fb_bitfield *bf)
{chan &= 0xffff;chan >>= 16 - bf->length;return chan << bf->offset;
}static int mylcd_setcolreg(unsigned regno,unsigned red, unsigned green, unsigned blue,unsigned transp, struct fb_info *info)
{unsigned int val;/* dprintk("setcol: regno=%d, rgb=%d,%d,%d\n",regno, red, green, blue); */switch (info->fix.visual) {case FB_VISUAL_TRUECOLOR:/* true-colour, use pseudo-palette */if (regno < 16) {u32 *pal = info->pseudo_palette;val = chan_to_field(red, &info->var.red);val |= chan_to_field(green, &info->var.green);val |= chan_to_field(blue, &info->var.blue);pal[regno] = val;}break;default:return 1; /* unknown type */}return 0;
}static struct fb_ops myfb_ops = {.owner = THIS_MODULE,.fb_setcolreg = mylcd_setcolreg,.fb_fillrect = cfb_fillrect,.fb_copyarea = cfb_copyarea,.fb_imageblit = cfb_imageblit,
};static int mylcd_probe(struct platform_device *pdev)
{struct device_node *display_np;dma_addr_t phy_addr;int ret;int width;int bits_per_pixel;struct display_timings *timings = NULL;struct display_timing *dt = NULL;struct imx6ull_lcdif *lcdif;struct resource *res;display_np = of_parse_phandle(pdev->dev.of_node, "display", 0);/* get common info */ret = of_property_read_u32(display_np, "bus-width", &width);ret = of_property_read_u32(display_np, "bits-per-pixel",&bits_per_pixel);/* get timming */timings = of_get_display_timings(display_np);dt = timings->timings[timings->native_mode];/* get gpio from device tree */bl_gpio = gpiod_get(&pdev->dev, "backlight", 0);/* config bl_gpio as output */gpiod_direction_output(bl_gpio, 1);/* set val: gpiod_set_value(bl_gpio, status); *//* get clk from device tree */clk_pix = devm_clk_get(&pdev->dev, "pix");clk_axi = devm_clk_get(&pdev->dev, "axi");/* set clk rate */clk_set_rate(clk_pix, dt->pixelclock.typ);/* enable clk */clk_prepare_enable(clk_pix);clk_prepare_enable(clk_axi);/* 1.1 分配fb_info */myfb_info = framebuffer_alloc(0, NULL);/* 1.2 设置fb_info *//* a. var : LCD分辨率、颜色格式 */myfb_info->var.xres_virtual = myfb_info->var.xres = dt->hactive.typ;myfb_info->var.yres_virtual = myfb_info->var.yres = dt->vactive.typ;myfb_info->var.bits_per_pixel = 16; /* rgb565 */myfb_info->var.red.offset = 11;myfb_info->var.red.length = 5;myfb_info->var.green.offset = 5;myfb_info->var.green.length = 6;myfb_info->var.blue.offset = 0;myfb_info->var.blue.length = 5;/* b. fix */strcpy(myfb_info->fix.id, "100ask_lcd");myfb_info->fix.smem_len = myfb_info->var.xres * myfb_info->var.yres * myfb_info->var.bits_per_pixel / 8;if (myfb_info->var.bits_per_pixel == 24)myfb_info->fix.smem_len = myfb_info->var.xres * myfb_info->var.yres * 4;/* fb的虚拟地址 */myfb_info->screen_base = dma_alloc_wc(NULL, myfb_info->fix.smem_len, &phy_addr,GFP_KERNEL);myfb_info->fix.smem_start = phy_addr; /* fb的物理地址 */myfb_info->fix.type = FB_TYPE_PACKED_PIXELS;myfb_info->fix.visual = FB_VISUAL_TRUECOLOR;myfb_info->fix.line_length = myfb_info->var.xres * myfb_info->var.bits_per_pixel / 8;if (myfb_info->var.bits_per_pixel == 24)myfb_info->fix.line_length = myfb_info->var.xres * 4;/* c. fbops */myfb_info->fbops = &myfb_ops;myfb_info->pseudo_palette = pseudo_palette;/* 1.3 注册fb_info */register_framebuffer(myfb_info);/* 1.4 硬件操作 *///lcdif = ioremap(0x021C8000, sizeof(*lcdif));res = platform_get_resource(pdev, IORESOURCE_MEM, 0);lcdif = devm_ioremap_resource(&pdev->dev, res);lcd_controller_init(lcdif, dt, bits_per_pixel, 16, phy_addr);lcd_controller_enable(lcdif);gpiod_set_value(bl_gpio, 1); return 0;
}static int mylcd_remove(struct platform_device *pdev)
{/* 反过来操作 *//* 2.1 反注册fb_info */unregister_framebuffer(myfb_info);/* 2.2 释放fb_info */framebuffer_release(myfb_info);iounmap(mylcd_regs);return 0;
}static const struct of_device_id mylcd_of_match[] = {{ .compatible = "100ask,lcd_drv", },{ },
};
MODULE_DEVICE_TABLE(of, simplefb_of_match);static struct platform_driver mylcd_driver = {.driver = {.name = "mylcd",.of_match_table = mylcd_of_match,},.probe = mylcd_probe,.remove = mylcd_remove,
};static int __init lcd_drv_init(void)
{int ret;ret = platform_driver_register(&mylcd_driver);if (ret)return ret;return 0;
}/* 2. 出口 */
static void __exit lcd_drv_exit(void)
{platform_driver_unregister(&mylcd_driver);
}module_init(lcd_drv_init);
module_exit(lcd_drv_exit);
MODULE_LICENSE("GPL");
相关文章:
嵌入式Linux驱动开发(LCD屏幕专题)(三)
1. 硬件相关的操作 LCD驱动程序的核心就是: 分配fb_info设置fb_info注册fb_info硬件相关的设置 硬件相关的设置又可以分为3部分: 引脚设置时钟设置LCD控制器设置 2. 在设备树里指定LCD参数 framebuffer-mylcd {compatible "100ask,lcd_drv&qu…...
MySQL视图用户管理
文章目录 视图视图的规则用户用户信息创建用户删除用户修改密码 用户权限给用户授权回收权限 视图 视图是一个虚拟表,其内容由查询定义。同真实的表一样,视图包含一系列带有名称的列和行数据。视图的数据变化会影响到基表,基表的数据变化也会…...

我发现了一个很好看的字体,霞鹜文楷!如何换windows和typora字体?
1、字体 官方地址如下,下载也很简单。 https://github.com/lxgw/LxgwWenKai 有1W多的stars。 方式: 直接打包下载。下载不来,可以联系我。 然后ttf的文件,全部安装就行了。 reg save "HKCU\Control Panel" .\res…...

微软8月系统更新引发问题:虚拟内存分页文件出现错误
微软的八月系统更新引发了一系列问题,其中包括“UNSUPPORTED_PROCESSOR”蓝屏错误和文件管理器故障。尽管微软已经修复了前者,但据国外科技媒体Windows Latest报道,仍有用户反馈在非微星设备上出现“fault in nonpaged area”蓝屏错误。 如果…...
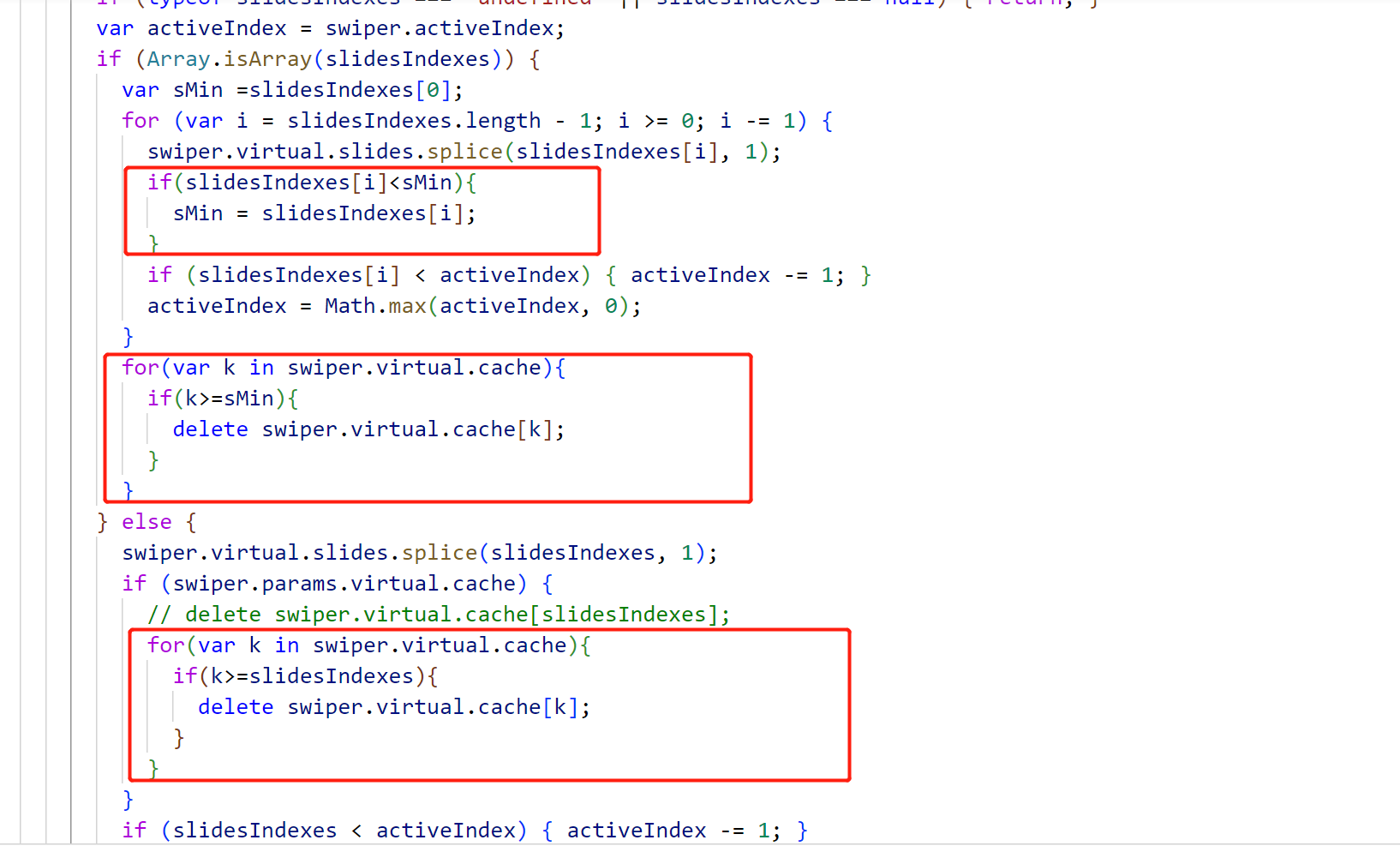
swiper删除虚拟slide问题
在存在缓存的情况下,删除较前的slide,会出现当前slide与后一个slide重复出现的情况 假设当前存在5个slide,且这5个slide已缓存,则删除slide2后,仍为5个slide,且slide2的内容变为slide3的内容,此…...
FPGA实战小项目2
基于FPGA的贪吃蛇游戏 基于FPGA的贪吃蛇游戏 基于fpga的数字密码锁ego1 基于fpga的数字密码锁ego1 基于fpga的数字时钟 basys3 基于fpga的数字时钟 basys3...

一些关于完整小程序项目的优秀开源
转载自: 35个项目,开源,开源! (qq.com) 那几本霸占我休息时间的PDF! (qq.com) 13个超强的 SpringBoot 实战项目 (还不赶紧收藏起来) (qq.com) 用SpringBoot开发一个人脸识别系统!…...

Windows模拟器推荐
物是人非事事休,欲语泪先流 Windows模拟器推荐 如果你需要在 Windows 操作系统之外运行 Windows 应用程序或测试不同版本的 Windows,有几个 Windows 模拟器和虚拟机软件可供选择。以下是一些常用的 Windows 模拟器和虚拟机软件: VirtualBox&…...

搭建RabbitMQ消息服务,整合SpringBoot实现收发消息
作者主页:Designer 小郑 作者简介:3年JAVA全栈开发经验,专注JAVA技术、系统定制、远程指导,致力于企业数字化转型,CSDN博客专家,蓝桥云课认证讲师。 目录 一、前言1.1 什么是消息队列1.2 RabbitMQ 是什么1.…...
Web framework-Gin(二)
目录 一、Gin 1、Ajax 2、文件上传 2.1、form表单中文件上传(单个文件) 2.2、form表单中文件上传(多个文件) 2.3、ajax上传单个文件 2.4、ajax上传多个文件 3、模板语法 4、数据绑定 5、路由组 6、中间件 一、Gin 1、Ajax AJAX 即“Asynchronous Javascript And XM…...
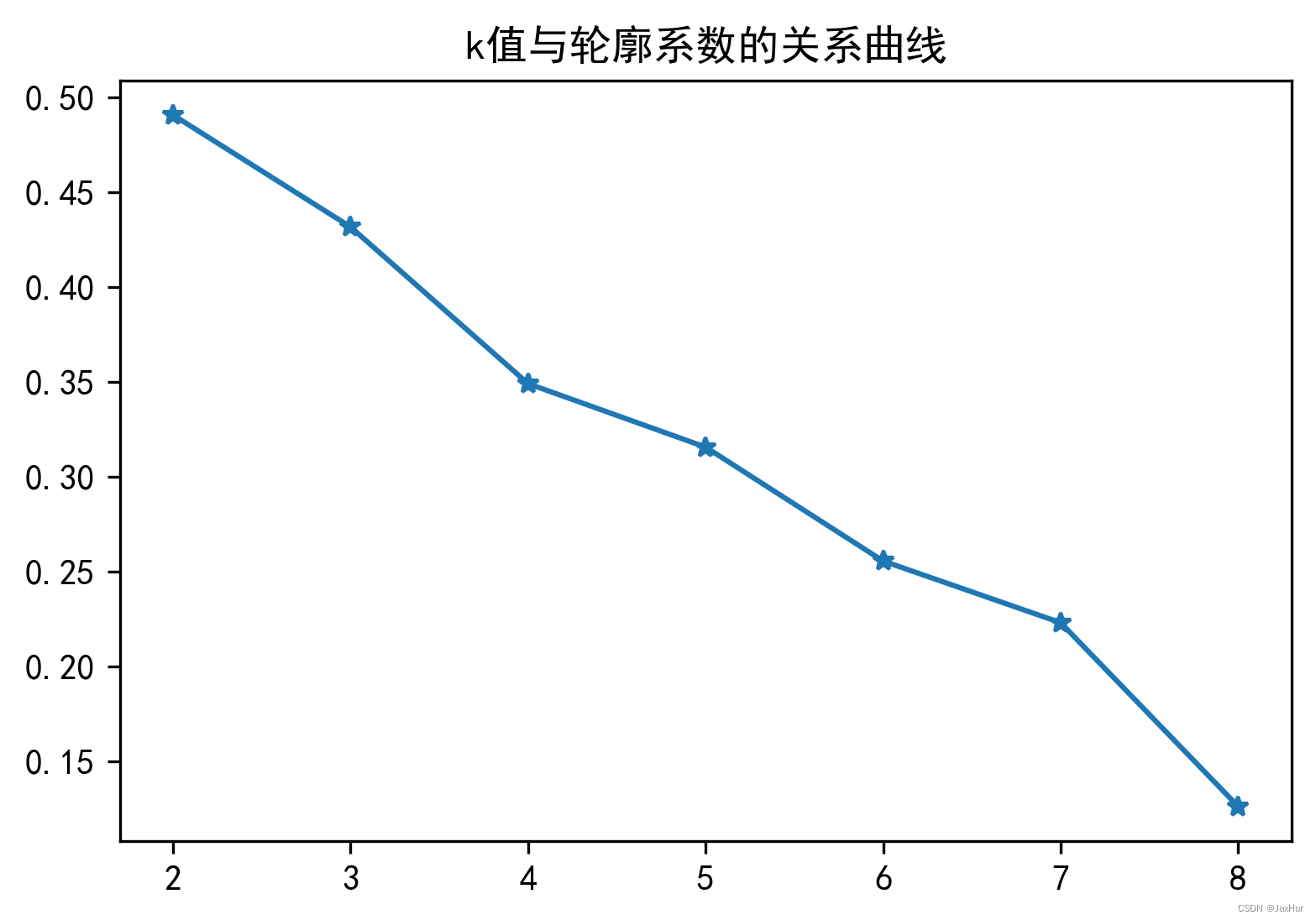
【聚类】K-Means聚类
cluster:簇 原理: 这边暂时没有时间具体介绍kmeans聚类的原理。简单来说,就是首先初始化k个簇心;然后计算所有点到簇心的欧式距离,对一个点来说,距离最短就属于那个簇;然后更新不同簇的簇心&a…...
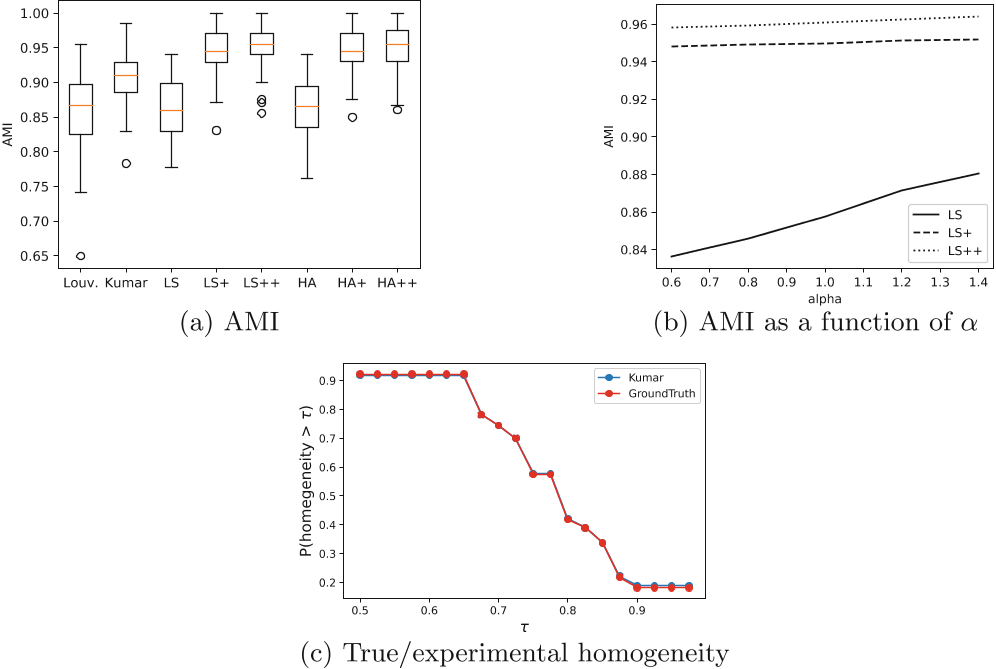
超图聚类论文阅读2:Last-step算法
超图聚类论文阅读2:Last-step算法 《使用超图模块化的社区检测算法》 《Community Detection Algorithm Using Hypergraph Modularity》 COMPLEX NETWORKS 2021, SCI 3区 具体实现源码见HyperNetX库 工作:提出了一种用于超图的社区检测算法。该算法的主要…...

React 防抖与节流用法
在React中,防抖和节流是优化性能和提升用户体验的常用技术。下面是它们的用法: 防抖(Debounce):防抖是指在某个事件触发后,等待一段时间后执行回调函数。如果在等待时间内再次触发该事件,将重新…...

发布 VectorTraits v1.0,它是 C# 下增强SIMD向量运算的类库
发布 VectorTraits v1.0, 它是C#下增强SIMD向量运算的类库 VectorTraits: SIMD Vector type traits methods (SIMD向量类型的特征方法). NuGet: https://www.nuget.org/packages/VectorTraits/1.0.0 源代码: https://github.com/zyl910/VectorTraits 用途 总所周知&#x…...

HCIA自学笔记01-冲突域
共享式网络(用同一根同轴电缆通信)中可能会出现信号冲突现象。 如图是一个10BASE5以太网,每个主机都是用同一根同轴电缆来与其它主机进行通信,因此,这里的同轴电缆又被称为共享介质,相应的网络被称为共享介…...

3D封装技术发展
长期以来,芯片制程微缩技术一直驱动着摩尔定律的延续。从1987年的1um制程到2015年的14nm制程,芯片制程迭代速度一直遵循摩尔定律的规律,即芯片上可以容纳的晶体管数目在大约每经过18个月到24个月便会增加一倍。但2015年以后,芯片制…...

探讨下live555用的编程设计模式
这个应该放到这里 7.live555mediaserver-第1阶段小结(完整对象图和思维导图) https://blog.csdn.net/yhb1206/article/details/127330771 但是想想,还是拿出来吧。 从这第1阶段就能发现,它实质用到了reactor网络编程模式。...
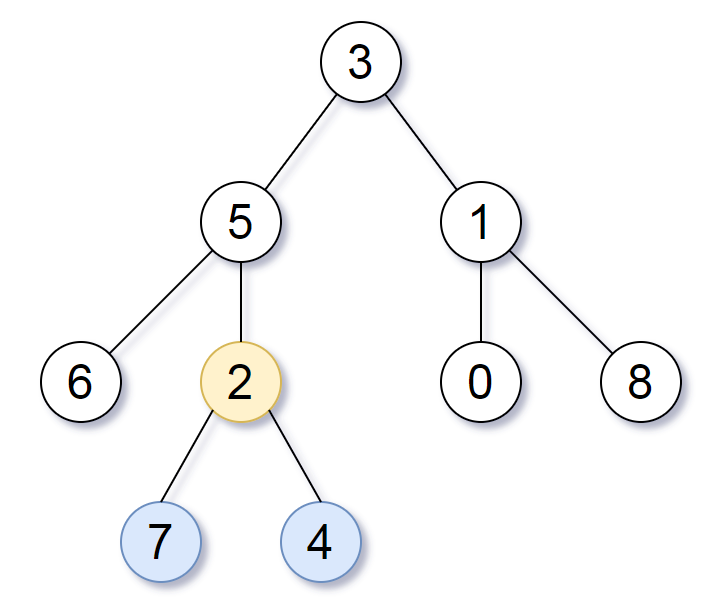
LeetCode 1123. Lowest Common Ancestor of Deepest Leaves【树,DFS,BFS,哈希表】1607
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...
centroen 23版本换界面了
旧版本 新版本 没有与操作系统一起打包的ISO文件了,要么先安装系统,再安装Centreon,要么用pve导入OVF文件...
)
Postman 调用 Microsoft Graph API (InsCode AI 创作助手)
官方配置参考网址: https://learn.microsoft.com/zh-cn/graph/use-postman 获取 Azure AD 应用程序凭据: 在 Azure AD 中注册你的应用程序,并获取客户端ID和客户端密钥。这些凭据将允许你的应用程序与 Microsoft Graph 进行身份验证和访问权限…...

Unity开发者为何转向VSCode:效率提升26倍的工程实践
1. 为什么我三年前就彻底卸载了Visual Studio——一个Unity老手的真实效率账在Unity项目里打开Visual Studio,等它加载完所有C#项目、符号、IntelliSense、Rider插件、Resharper缓存、NuGet包索引……这个过程平均耗时47秒——这是我用Stopwatch在2021年到2023年连续…...

免费德州扑克GTO求解器终极指南:如何用Desktop Postflop提升你的扑克技术
免费德州扑克GTO求解器终极指南:如何用Desktop Postflop提升你的扑克技术 【免费下载链接】desktop-postflop [Development suspended] Advanced open-source Texas Holdem GTO solver with optimized performance 项目地址: https://gitcode.com/gh_mirrors/de/d…...

揭开网易游戏资源黑盒:3个步骤让你成为NPK解包专家
揭开网易游戏资源黑盒:3个步骤让你成为NPK解包专家 【免费下载链接】unnpk 解包网易游戏NeoX引擎NPK文件,如阴阳师、魔法禁书目录。 项目地址: https://gitcode.com/gh_mirrors/un/unnpk 想象一下,当你打开一个网易游戏的安装包&#…...

终极指南:5步掌握.NET Core Mod加载器Reloaded-II的完整使用方法
终极指南:5步掌握.NET Core Mod加载器Reloaded-II的完整使用方法 【免费下载链接】Reloaded-II Universal .NET Core Powered Modding Framework for any Native Game X86, X64. 项目地址: https://gitcode.com/gh_mirrors/re/Reloaded-II 你是否厌倦了手动复…...

ComfyUI-FramePackWrapper:8GB显存也能生成高清视频的终极指南
ComfyUI-FramePackWrapper:8GB显存也能生成高清视频的终极指南 【免费下载链接】ComfyUI-FramePackWrapper 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-FramePackWrapper 你是否曾因显卡显存不足而无法体验AI视频生成的魅力?ComfyUI-…...

Monocle性能监控与优化:确保高并发访问的稳定性
Monocle性能监控与优化:确保高并发访问的稳定性 【免费下载链接】monocle Link and news sharing 项目地址: https://gitcode.com/gh_mirrors/mon/monocle Monocle作为一个链接和新闻分享平台,在面对高并发访问时的稳定性至关重要。本文将分享一些…...

【 linux 】来完成一个进度条吧
c语言是有缓冲区的,缓冲区刷新有三种方式,输入\n,程序结束后自动刷新,fflush(stdout)手动刷新。效果展示视觉上#是逐个往后加的,这是视觉欺骗。事实是每次#都是从头开始的,只不过计算…...

三步突破原神60FPS限制:安全高效的游戏性能优化方案
三步突破原神60FPS限制:安全高效的游戏性能优化方案 【免费下载链接】genshin-fps-unlock unlocks the 60 fps cap 项目地址: https://gitcode.com/gh_mirrors/ge/genshin-fps-unlock genshin-fps-unlock 是一款专为《原神》PC版玩家设计的开源帧率解锁工具&…...

ElevenLabs青少年语音TTS效果对比测试:12款竞品横评,仅2家通过COPPA 3.0儿童语音伦理认证
更多请点击: https://kaifayun.com 第一章:ElevenLabs青少年语音TTS的技术定位与伦理边界 ElevenLabs推出的青少年语音合成(Teen Voice TTS)并非简单的声音风格扩展,而是基于多说话人自监督表征学习与音色解耦建模的高…...

为什么90%的工程师不敢用ChatGPT交付生产代码?——基于12家头部科技公司内部审计报告的独家解读
更多请点击: https://intelliparadigm.com 第一章:为什么90%的工程师不敢用ChatGPT交付生产代码?——基于12家头部科技公司内部审计报告的独家解读 信任鸿沟:不是能力不足,而是责任不可追溯 12家受访企业(…...