Unity Avatar Foot IK - Avatar Foot Placement Resolution
文章目录
- 简介
- 实现
- Avatar FBX Import Settings
- Animator Settings
- On Animator IK
- Calculate IK Position & Rotation
- Body Position
- Apply IK Position & Rotation
简介
通过Unity内部的Mecanim动画系统实现的FootIK功能,效果如图所示,左右分别为开启和关闭FootIK的效果:
")
")
")
")
初版1.0.0代码已上传至SKFramework框架PackageManager中:

相关变量说明:

Enable Foot Ik:是否启用FootIKFoot Ik Pass Layer Index:Animator启用IKPass对应的层级Layer Mask:射线检测时所有的层级Body Y Offset:身体Y坐标的偏移量Body Position Lerp Speed:身体坐标插值的速度Foot Position Lerp Speed:脚部坐标插值的速度Raycast Distance:射线检测的最大距离Raycast Origin Height:射线检测的高度
实现
Avatar FBX Import Settings
- Animation Type: 需要Humanoid人形动画

- Avatar Configuration:确保配置正确

Animator Settings
- Foot IK:相应的Animator State中需要开启Foot IK

- IK Pass:相应的Animator Layer中需要开启IK Pass通道

On Animator IK
动画IK回调函数,Unity Documentation中这样介绍:OnAnimatorIK() 在即将更新其内部反向动力学系统前由动画器组件调用。该回调可用于设置反向动力学目标的位置及其各自的权重。
参数LayerIndex指的是Animator中的Layer层级的索引值。

如何设置IK目标的位置及其权重?需要用到Animator中的函数:
SetIKPosition:设置一个IK Goal的位置SetIKPositionWeight:设置IK Goal的过渡权重(0表示IK之前的原始动画,1表示在goal)SetIKRotation:设置一个IK Goal的旋转SetIKRotationWeight:设置IK Goal的旋转权重
Calculate IK Position & Rotation
如何获取IK目标位置及旋转?可以通过在脚部加上一定单位的高度上向下进行Raycast射线检测,RaycastHit中的point碰撞点即是IK的目标位置,并且通过normal法线方向获得IK的目标旋转,代码如下所示:
#region 计算左脚IK
//左脚坐标
leftFootPosition = animator.GetBoneTransform(HumanBodyBones.LeftFoot).position;
leftFootPosition.y = transform.position.y + raycastOriginHeight;//左脚 射线检测
leftFootRaycast = Physics.Raycast(leftFootPosition, Vector3.down, out RaycastHit hit, raycastDistance + raycastOriginHeight, layerMask);
if (leftFootRaycast)
{leftFootIkPosition = leftFootPosition;leftFootIkPosition.y = hit.point.y + bodyYOffset;leftFootIkRotation = Quaternion.FromToRotation(transform.up, hit.normal);
#if UNITY_EDITOR//射线Debug.DrawLine(leftFootPosition, leftFootPosition + Vector3.down * (raycastDistance + raycastOriginHeight), Color.yellow);//法线Debug.DrawLine(hit.point, hit.point + hit.normal * .5f, Color.cyan);
#endif
}
else
{leftFootIkPosition = Vector3.zero;
}
#endregion
Body Position
在设置IK目标位置之前,需要先计算和调整身体的高度,原因如下图所示,当射线检测到的IK Position,腿的长度达不到时,需要将身体的Y坐标减去相应距离。

身体高度通过Animator中的bodyPosition去调整:

代码如下所示:
#region 身体
if (leftFootRaycast && rightFootRaycast)
{//左脚坐标Y差值float leftPosYDelta = leftFootIkPosition.y - transform.position.y;//右脚坐标Y差值float rightPosYDelta = rightFootIkPosition.y - transform.position.y;//身体坐标Y差值取二者最小值float bodyPosYDelta = Mathf.Min(leftPosYDelta, rightPosYDelta);//目标身体坐标Vector3 targetBodyPosition = animator.bodyPosition + Vector3.up * bodyPosYDelta;//插值运算targetBodyPosition.y = Mathf.Lerp(lastBodyPositionY, targetBodyPosition.y, bodyPositionLerpSpeed);//设置身体坐标animator.bodyPosition = targetBodyPosition;
}
//缓存身体Y坐标
lastBodyPositionY = animator.bodyPosition.y;
#endregion
Apply IK Position & Rotation
求得目标位置和旋转并调整完身体高度后,应用目标位置和旋转即可:
#region 应用左脚IK
//权重
animator.SetIKPositionWeight(AvatarIKGoal.LeftFoot, 1f);
animator.SetIKRotationWeight(AvatarIKGoal.LeftFoot, 1f);Vector3 targetIkPosition = animator.GetIKPosition(AvatarIKGoal.LeftFoot);
if (leftFootRaycast)
{//转局部坐标targetIkPosition = transform.InverseTransformPoint(targetIkPosition);Vector3 world2Local = transform.InverseTransformPoint(leftFootIkPosition);//插值计算float y = Mathf.Lerp(lastLeftFootPositionY, world2Local.y, footPositionLerpSpeed);targetIkPosition.y += y;lastLeftFootPositionY = y;//转全局坐标targetIkPosition = transform.TransformPoint(targetIkPosition);//当前旋转Quaternion currRotation = animator.GetIKRotation(AvatarIKGoal.LeftFoot);//目标旋转Quaternion nextRotation = leftFootIkRotation * currRotation;animator.SetIKRotation(AvatarIKGoal.LeftFoot, nextRotation);
}
animator.SetIKPosition(AvatarIKGoal.LeftFoot, targetIkPosition);
#endregion
相关文章:
Unity Avatar Foot IK - Avatar Foot Placement Resolution
文章目录简介实现Avatar FBX Import SettingsAnimator SettingsOn Animator IKCalculate IK Position & RotationBody PositionApply IK Position & Rotation简介 通过Unity内部的Mecanim动画系统实现的FootIK功能,效果如图所示,左右分别为开启…...

是时候告别这些 Python 库了
随着每个 Python 版本的发布,都会添加新模块,并引入新的更好的做事方式,虽然我们都习惯了使用好的旧 Python 库和某些做事方式,但现在也时候升级并利用新的和改进的模块及其特性了。 文章目录技术提升PathlibSecretsZoneinfoDatac…...
nodejs基于vue论坛交流管理系统
可定制框架:ssm/Springboot/vue/python/PHP/小程序/安卓均可开发目录 目录 1 绪论 1 1.1课题背景 1 1.2课题研究现状 1 1.3初步设计方法与实施方案 2 1.4本文研究内容 2 2 系统开发环境 4 3 系统分析 6 3.1系统可行性分析 6 3.1.1经济可行性 6 3.1.2技术可行性 6 3.1.3运行可行…...

企业电子招投标采购系统源码之系统的首页设计
功能模块: 待办消息,招标公告,中标公告,信息发布 描述: 全过程数字化采购管理,打造从供应商管理到采购招投标、采购合同、采购执行的全过程数字化管理。通供应商门户具备内外协同的能力,为…...
)
华为OD机试真题Python实现【竖直四子棋】真题+解题思路+代码(20222023)
竖直四子棋 题目 竖直四子棋的棋盘是竖立起来的,双方轮流选择棋盘的一列下子, 棋子因重力落到棋盘底部或者其他棋子之上,当一列的棋子放满时,无法再在这列上下子。 一方的4个棋子横、竖或者斜方向连成一线时获胜。 现给定一个棋盘和红蓝对弈双方的下子步骤,判断红方或蓝…...

LeetCode 73. 矩阵置零
LeetCode 73. 矩阵置零 难度:middle\color{orange}{middle}middle 题目描述 给定一个 KaTeX parse error: Double subscript at position 3: _m_̲ x _n_ 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0 。请使用 原地 算法…...
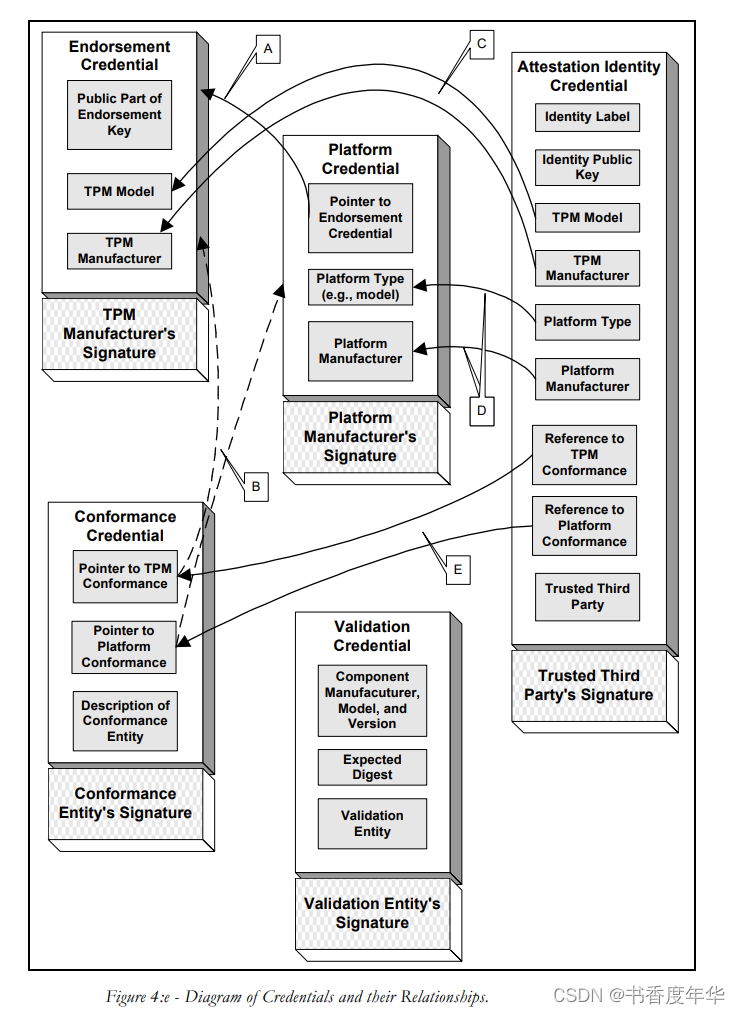
「TCG 规范解读」第10章 TPM工作组 保护你的数字环境
可信计算组织(Ttrusted Computing Group,TCG)是一个非盈利的工业标准组织,它的宗旨是加强在相异计算机平台上的计算环境的安全性。TCG于2003年春成立,并采纳了由可信计算平台联盟(the Trusted Computing Platform Alli…...
)
华为OD机试真题Python实现【 找字符】真题+解题思路+代码(20222023)
找字符 题目 给定两个字符串, 从字符串2中找出字符串1中的所有字符, 去重并按照 ASCII 码值从小到大排列。 🔥🔥🔥🔥🔥👉👉👉👉👉👉 华为OD机试(Python)真题目录汇总 ## 输入 字符范围满足 ASCII 编码要求, 输入字符串1长度不超过1024, 字符串…...
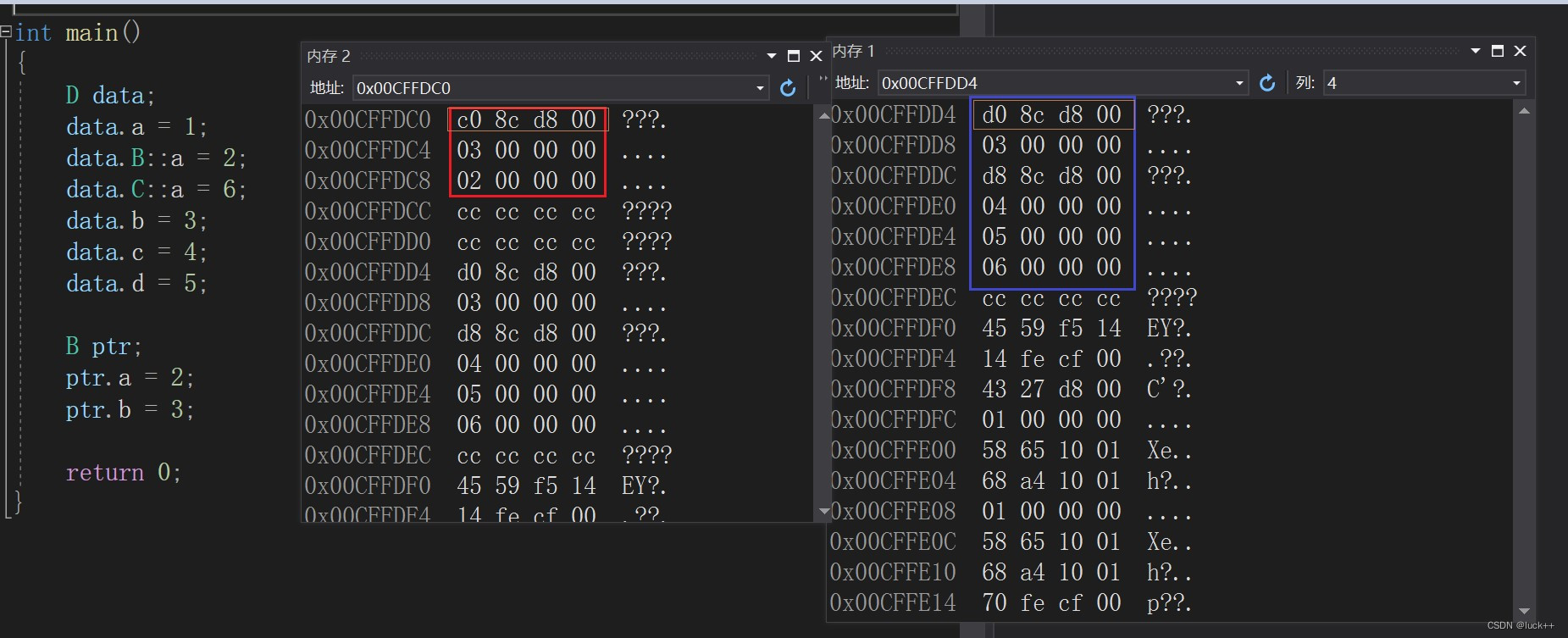
如何解决多继承下的 菱形继承 问题
目录 概念: 菱形虚拟继承: 概念: 此时D类属于多继承,可以看到D类里面会有两份A类的数据,菱形继承也并不一定就一定就是上图的菱形,假如B类下面还有一个类,D类继承它,同样也是菱形继承问题 cla…...

rk3288-android8.1-以太网ethernet和蓝牙Bluetooth
遇到一个现象,以太网和蓝牙打不开 经过不断分析和查找发现问题在.config中 CONFIG_MOTORCOMM_PHYy 会导致以太网的eth0注册不成功(现在是双网口,还有个USB网卡) 改成# CONFIG_MOTORCOMM_PHY is not set 后以太网可以正常 # CONFIG_RTC_DRV_RK808 is not set 会导致蓝牙打不…...
算法比赛——必备的数论知识
秋名山码民的主页 🎉欢迎关注🔎点赞👍收藏⭐️留言📝 🙏作者水平有限,如发现错误,还请私信或者评论区留言! 目录一、欧几里得二、扩展欧几里得三、算术基本定理四、线性筛选求质数五…...
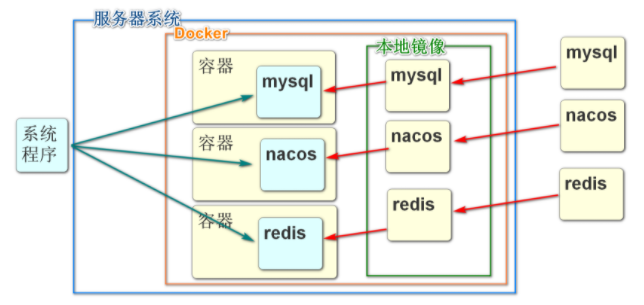
Docker概述
什么是Docker我们要学习在Linux(RockyLinux)中安装使用Docker来配置软件的功能Docker是一个用来开发、运输和运行应用程序的开放平台。使用Docker可以将应用程序与基础结构分离,以便快速交付软件。使用Docker,您可以以管理应用程序的方式管理基础架构。通…...

实验室设计建设方案主要内容
实验室设计建设整体解决方案SICOLAB需要综合考虑实验室的功能需求、空间布局、设备选型、安全防护、节能环保等多方面因素。以下是一个基本的实验室设计建设方案的流程:一、需求分析:了解实验室的使用目的、实验内容、使用人数、设备种类、实验标准等&am…...
)
华为OD机试真题Python实现【日志采集系统】真题+解题思路+代码(20222023)
日志采集系统 题目 日志采集是运维系统的的核心组件。日志是按行生成,每行记做一条,由采集系统分批上报。 如果上报太频繁,会对服务端造成压力; 如果上报太晚,会降低用户的体验; 如果一次上报的条数太多,会导致超时失败。 为此,项目组设计了如下的上报策略: 每成功上…...

Python的模块与工具包
模块 模块是一个Python文件,以 .py结尾。模块能定义函数,类和变量,模块里也能包含可执行的代码。 作用 python 中有很多各种不同的模块,每一个模块都可以帮助我们快速的实现一些功能,比如实现和时间相关的功能就可以…...

联合熵和条件熵
本专栏包含信息论与编码的核心知识,按知识点组织,可作为教学或学习的参考。markdown版本已归档至【Github仓库:information-theory】,需要的朋友们自取。或者公众号【AIShareLab】回复 信息论 也可获取。 文章目录联合熵条件熵联合…...
)
华为OD机试真题Python实现【求最大数字】真题+解题思路+代码(20222023)
求最大数字 题目 给定一个由纯数字组成以字符串表示的数值,现要求字符串中的每个数字最多只能出现2次,超过的需要进行删除;删除某个重复的数字后,其它数字相对位置保持不变。 如34533,数字3重复超过2次,需要删除其中一个3,删除第一个3后获得最大数值4533 请返回经过删…...

Python爬虫(10)selenium爬虫后数据,存入csv、txt并将存入数据并对数据进行查询
之前的文章有关于更多操作方式详细解答,本篇基于前面的知识点进行操作,如果不了解可以先看之前的文章 Python爬虫(1)一次性搞定Selenium(新版)8种find_element元素定位方式 Python爬虫(2)-Selenium控制浏览…...
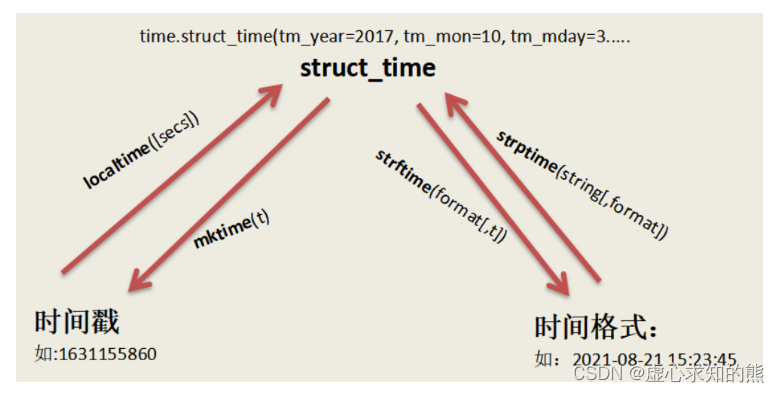
Python 之 Pandas 时间函数 time 、datetime 模块和时间处理基础
文章目录一、time 模块1、时间格式转换图2. struct_time 元组元素结构3. format time 结构化表示二、datetime 模块1. date类2. 方法和属性3. datetime 类三、timedelta 类的时间加减四、时间处理基础Python 中提供了对时间日期的多种多样的处理方式,主要是在 time …...

C语言学习及复习笔记-【5】C 运算符
文章目录5. C 运算符5.1 关系运算符5.2 逻辑运算符5.3 位运算符5.4 杂项运算符 ↦ sizeof & 三元5.5 例子1). 利用异或 ^ 来交换两个数的值,而且不引入其他变量。2). 利用位与 & 运算,判断一个整数是否是2的整数次幂。3). 不同长度的数据进行位运…...

Unity-MCP协议:可嵌入、可协商的AI上下文通信标准
1. 这不是又一个“AI插件”,而是Unity开发工作流的底层重定义你有没有过这样的时刻:在Unity里反复调整Animator Controller的过渡条件,只为让角色转身动画不穿模;写完一段NavMesh寻路逻辑,却要花两小时调试Agent卡在斜…...

OpenClaw 连接阿里云百炼图文教程
OpenClaw 连接阿里云百炼图文教程 前置准备 已安装并可以正常打开 OpenClaw Windows。 OpenClaw 顶部 Gateway 状态保持在线。 已准备好可正常登录的阿里云账号。 可以正常访问阿里云百炼登录地址:https://bailian.console.aliyun.com/cn-beijing#/home 建议提…...

潮州东方轻奢风全屋高定找哪家
开篇引言根据《2026年中国全屋定制行业发展报告》,潮州市全屋定制市场规模同比增长38%,其中全屋高端定制细分市场同比增长52%。目前,潮州市家庭全屋定制需求占比72%,高端定制需求占比45%。为了帮助潮州市消费者选择合规、靠谱、差…...

ESP32多任务水位监测:从Arduino到ESP-IDF的FreeRTOS实战
1. 项目概述:从Arduino到ESP-IDF的跃迁去年我在做毕业设计时,为了搭建一个ESP32的传感器节点演示程序,第一次深入使用了FreeRTOS。那段时间,我几乎天天和任务调度、队列、信号量打交道,从最初的一头雾水到后来能流畅地…...

阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月
阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月 Jianbing Zhu 1^{1}1 1^{1}1 ECT-OS-JiuHuaShan 文明实验室 ORCID: 0009-0006-8591-1891 DOI: 10.5281/zenodo.20373157 Email: ect-os-jiuhuashanzoho…...

HarmonyOS 6学习:解决图片放大后无法移动至边缘的matrix4矩阵变换技巧
从"卡在中间"到"自由拖拽":一次完整的图片缩放平移边界问题攻关在HarmonyOS 6应用开发中,我最近遇到了一个看似简单却让人头疼的图片查看器问题:用户双指放大图片后,想要拖动查看边缘细节,却发现图…...

LVGL多页面开发避坑:用内部Timer替代轮询,解决页面切换时的内存踩踏问题
LVGL多页面开发中的内存安全实践:用Timer机制替代轮询的工程解决方案 在嵌入式UI开发中,LVGL因其轻量级和跨平台特性成为热门选择。但当项目复杂度提升到多页面交互时,开发者往往会遇到一个棘手问题:如何在频繁切换页面的同时保证…...

真可用!美团数字人模型开源,MV、电商等统统拿下
美团开源的数字人视频生成框架 LongCat-Video-Avatar 刚刚更新到 1.5 版本。是真能用。这版更新把音频编码器换了,推理步数砍到8步,在770人、13240条主观评分的大规模评测里,雷达图面积全面领先。音频编码器换血,8步出图LongCat-V…...

终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生
终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经…...

基于LSTM自编码器的家用电器功耗异常检测系统构建指南
1. 项目概述:从能耗洞察到智能干预我们每天都在和各种家用电器打交道,从清晨唤醒你的咖啡机,到深夜还在默默工作的路由器。你有没有想过,这些看似微不足道的设备,其背后隐藏的能耗模式,其实大有文章&#x…...