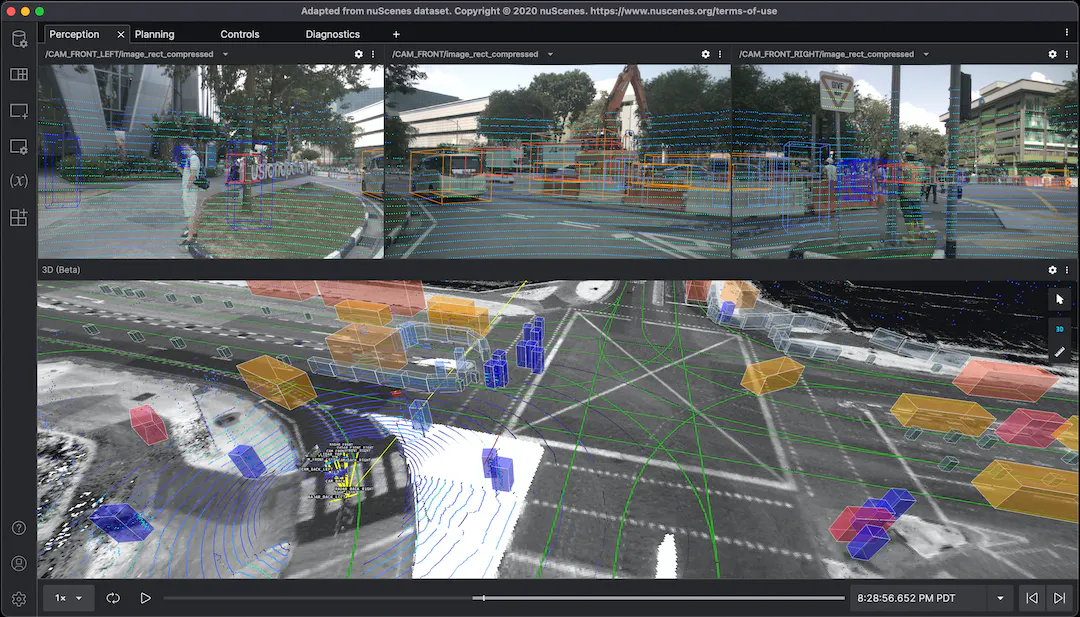
ROS2可视化利器---Foxglove Studio
0. 简介
之前作者已经讲了《ROS1可视化利器—Webviz》,然后就有读者问,ROS2有没有可以使用的可视化工具呢,答案是肯定的,除了plotjuggler这种ROS1和ROS2通用的可视化利器,还有一种全平台通用的软件FoxgloveStudio,Github开源链接为https://github.com/foxglove/studio。
1. FoxgloveStudio 说明
对于FoxgloveStudio这个程序来说,其可以支持基本上ROS原生的全部内容,同时它可以在浏览器中使用,也可作为Linux、Windows和macOS上的桌面应用程序使用。Foxglove项目是webviz项目的一个延伸,这个项目的logo产权是归Cruise的,但是同样是开源的。
Foxglove和Webviz这两个有着很多共通之处,比如说:都是基于Web技术。都是可以在web Browser中做机器人Topic的3D展示。WebViz和Foxglove Studio都是可以免费使用所有功能的,而且是源代码开放,任何人都可以使用它,或者向它贡献代码。并且都支持一套模块化设计的Panel,可以适应于某种特定的机器人场景,对特定的机器人数据进行解析和展示。
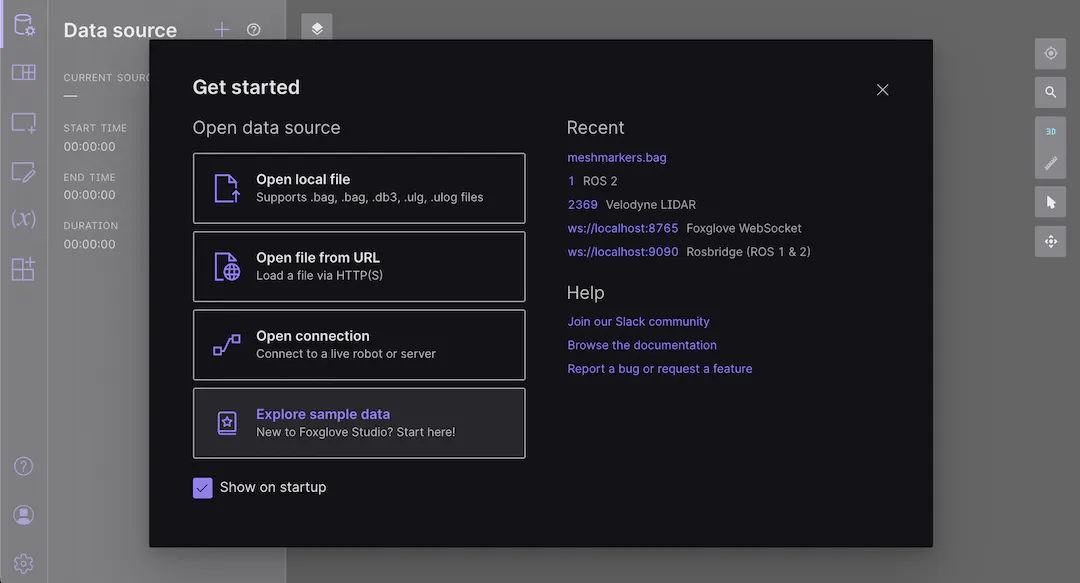
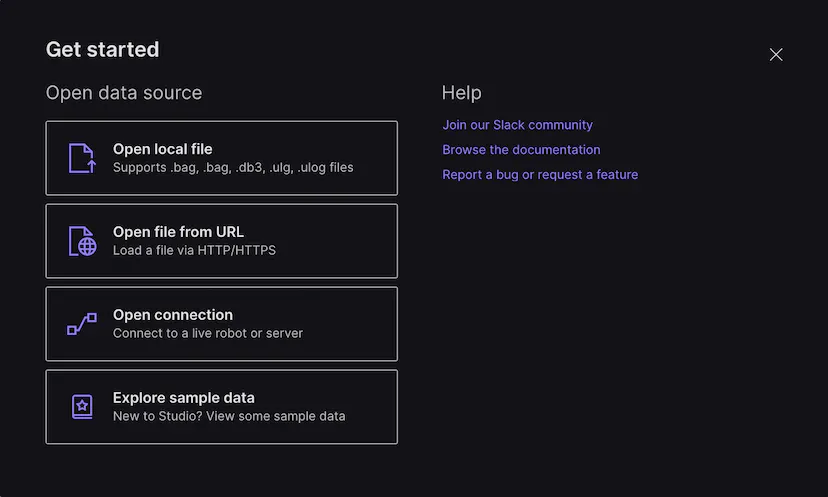
如果说ROS1可以选择Webviz和Foxglove Studio的话,那ROS2只能选择Foxglove Studio。当你第一次加载应用程序时,你会看到一个介绍性的对话框,有 "打开数据源 "选项和 "帮助 "资源。在随后的应用程序加载中,你也将能够重新连接到你最近在 "Recents "列表中选择的数据源。
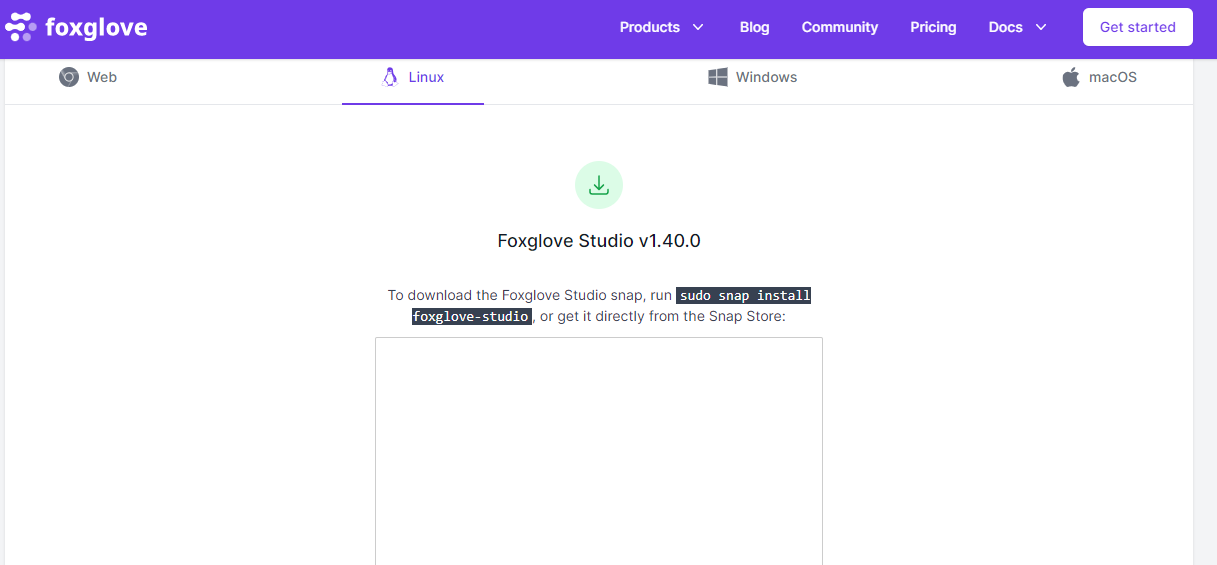
而如何安装的问题,官网也提供了快速的安装通道https://foxglove.dev/download,比如说,我们的Ubuntu环境只需要使用
下载正确的软件包 然后运行
sudo apt install ./foxglove-studio-*.deb
用以下方法安装未来的更新
sudo apt update && sudo apt install foxglove-studio
2. Foxglove Studio----打开
Foxglove Studio可以通过多种来源检查数据–包括实时和记录数据、ROS和非ROS连接,以及本地和远程记录数据文件。
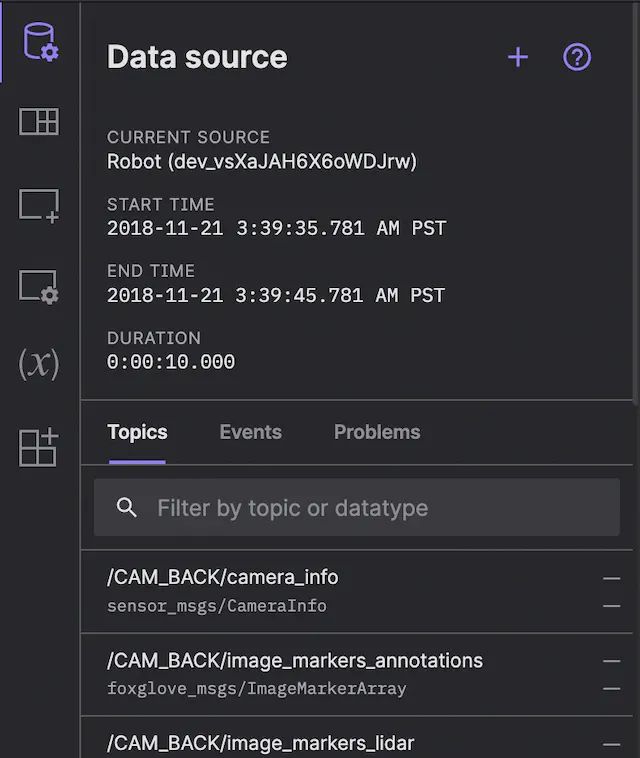
一旦你加载或连接到一个数据包,在应用程序侧边栏中打开数据源标签,以查看你当前数据包的细节。
- 录制的设备、开始/结束时间、持续时间
- 主题名称、模式名称、信息计数和发布率
- 当从Foxglove数据平台流传数据产生的事件
- 再次打开对话框以切换到不同的数据包
- 查看你的主题信息
所有预先记录的数据源(即ROS 1、ROS 2、MCAP和PX4 ULog文件),无论它们是在本地加载还是从远程URL加载,都将被预先加载到Foxglove Studio。这意味着你可以一次性将整个文件过程中的数据可视化并进行分析
3. Foxglove Studio----ROS1
在讲解ROS2之前,我们先来看一下Foxglove Studio的ROS1的使用.Foxglove Studio可以加载本地和远程的ROS 1(.bag)文件,或使用Rosbridge(WebSockets)或本地(TCP)连接直接连接到正在运行的ROS节点中。
3.1 本地文件
要加载一个本地的ROS 1 .bag文件,可以从文件管理器中双击它,直接将文件拖放到应用程序中,或者通过数据源对话框打开本地文件。
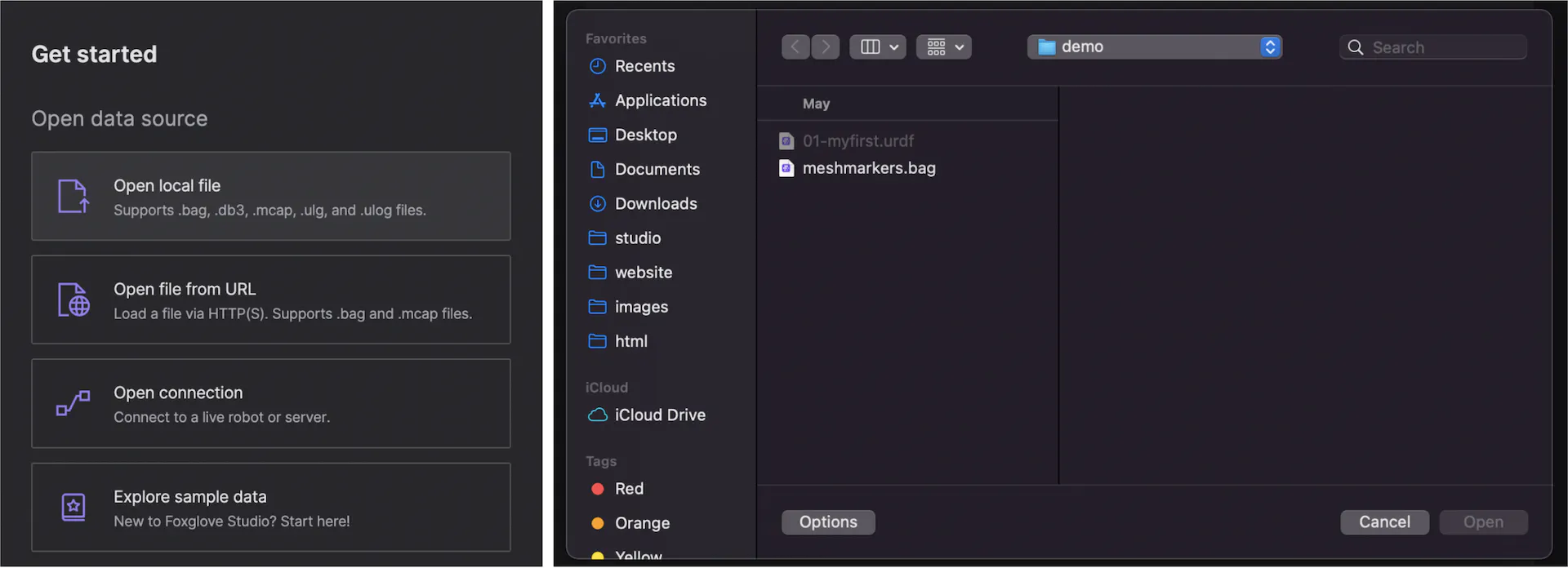
同时Foxglove Studio还支持加载远程的ROS 1 (.bag)文件,在数据源对话框中选择从URL打开文件,并输入远程文件的URL。
3.2 在线链接
对于实时连接,你必须与机器人处于同一网络。虽然我们支持多种选择,但我们推荐Foxglove WebSocket。
使用Foxglove WebSocket连接直接连接到你正在运行的ROS栈。这种连接使用标准协议,通过WebSockets将Studio连接到你的ROS主站。这里需要运行一个额外的ROS节点(foxglove_bridge)来进行进行通信。
cd <path/to/your/ros_ws>
git clone https://github.com/foxglove/ros-foxglove-bridge.git src/ros-foxglove-bridge
rosdep update
rosdep install -i --from-path src -y
catkin_make
source install/local_setup.bash
rosrun foxglove_bridge foxglove_bridge
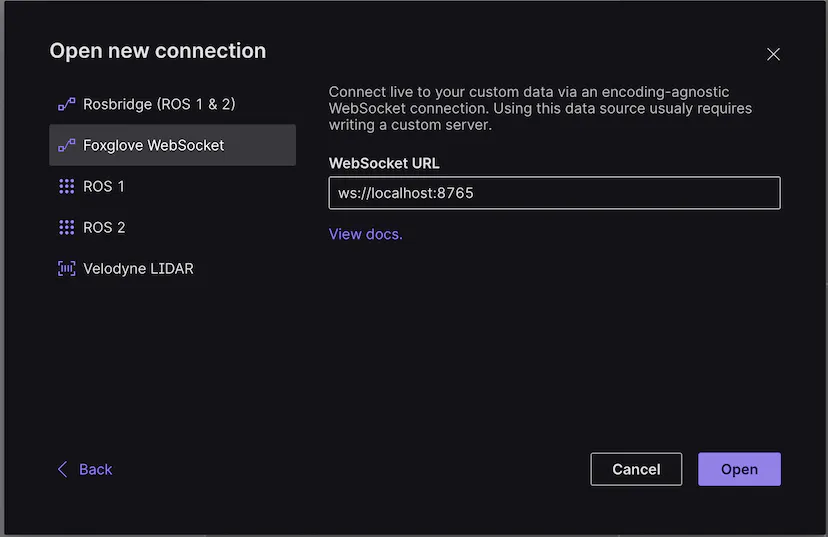
然后,在数据源对话框中点击打开连接,选择Foxglove WebSocket,然后输入你的Rosbridge服务器的URL,值得一提的是,Foxglove WebSocket连接支持发布回调信息,但不支持读取或设置ROS参数。
当然我们还可以用Rosbridge来完成连接,并通过WebSocket直接连接到你正在运行的ROS栈。这个连接选项只需要在Studio和你的机器人之间打开一个端口。
Rosbridge连接使用一个标准协议,通过WebSockets将Studio与你的ROS主站连接起来。虽然它确实需要运行一个额外的ROS节点(rosbridge_server)
# For Noetic (ROS 1)
sudo apt install ros-noetic-rosbridge-suite
接下来,启动WebSocket服务器,并查看命令打印结果,以确定它所监听的端口(例如ws://0.0.0.0:9090)
roslaunch rosbridge_server rosbridge_websocket.launch
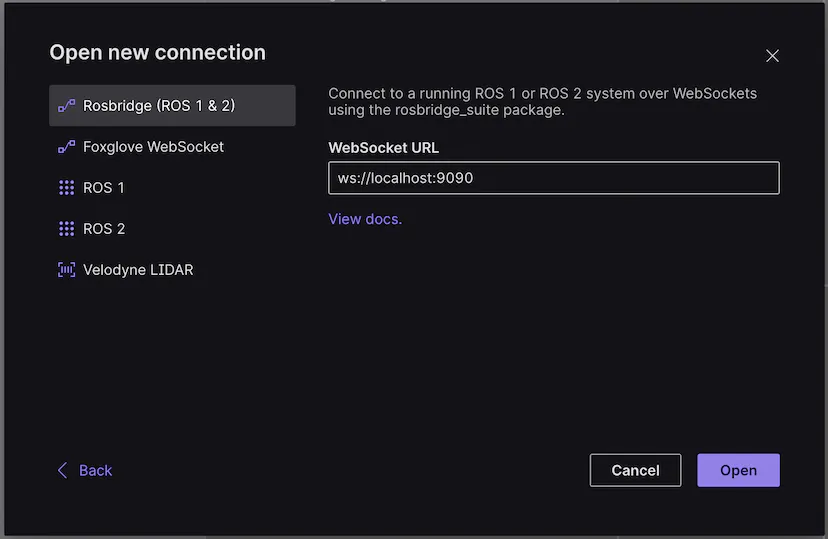
在数据源对话框中点击打开连接,选择 “Rosbridge (ROS 1 & 2)”,然后输入Rosbridge服务器的URL
4. Foxglove Studio----ROS2
Foxglove Studio可以加载本地和远程的ROS 2(.db3)文件,或使用Rosbridge(WebSockets)或本地(TCP)连接直接连接到运行中的ROS节点
由于ROS 2 (.db3)文件不包含其信息定义,我们建议在将其加载到Foxglove Studio之前先将其转换为独立的MCAP文件。
你可以使用MCAP CLI工具来帮助完成这一转换。
…详情请参照古月居
相关文章:
ROS2可视化利器---Foxglove Studio
0. 简介 之前作者已经讲了《ROS1可视化利器—Webviz》,然后就有读者问,ROS2有没有可以使用的可视化工具呢,答案是肯定的,除了plotjuggler这种ROS1和ROS2通用的可视化利器,还有一种全平台通用的软件FoxgloveStudio&…...
)
python实战应用讲解-【语法基础篇】流程控制-控制流的元素及语句(附示例代码)
目录 控制流的元素 条件 代码块 程序执行 代码块嵌套 控制流语句 if 语句...

[蓝桥杯 2019 省 A] 外卖店优先级
蓝桥杯 2019 年省赛 A 组 G 题题目描述“饱了么”外卖系统中维护着 N家外卖店,编号 1 ∼ N。每家外卖店都有一个优先级,初始时 (0 时刻)优先级都为0。每经过 1 个时间单位,如果外卖店没有订单,则优先级会减少 1&#x…...
Jetson Xavier nx(ubuntu18.04)安装rtl8152网卡驱动和8192网卡驱动
含义 Bus 002 : 指明设备连接到哪条总线。 Device 003 : 表明这是连接到总线上的第二台设备。 ID : 设备的ID,包括厂商的ID和产品的ID,格式 厂商ID:产品ID。 Realtek Semiconductor Corp. RTL8153 Gigabit Ethernet Adapter:生产商名字和设备…...

Rocky 9.1操作系统实现zabbix6.0的安装部署实战
文章目录前言一. 实验环境二. 安装zabbix过程2.1. 安装zabbix源2.2 安装zabbix相关的软件2.3 安装数据库并启动2.4 开始初始化数据库:2.5 创建数据库实例及对应的用户2.6 导入官网提供的数据2.7 配置zabbix 服务的配置文件2.8. 启动服务2.9 从网页进行安装2.10 登陆…...
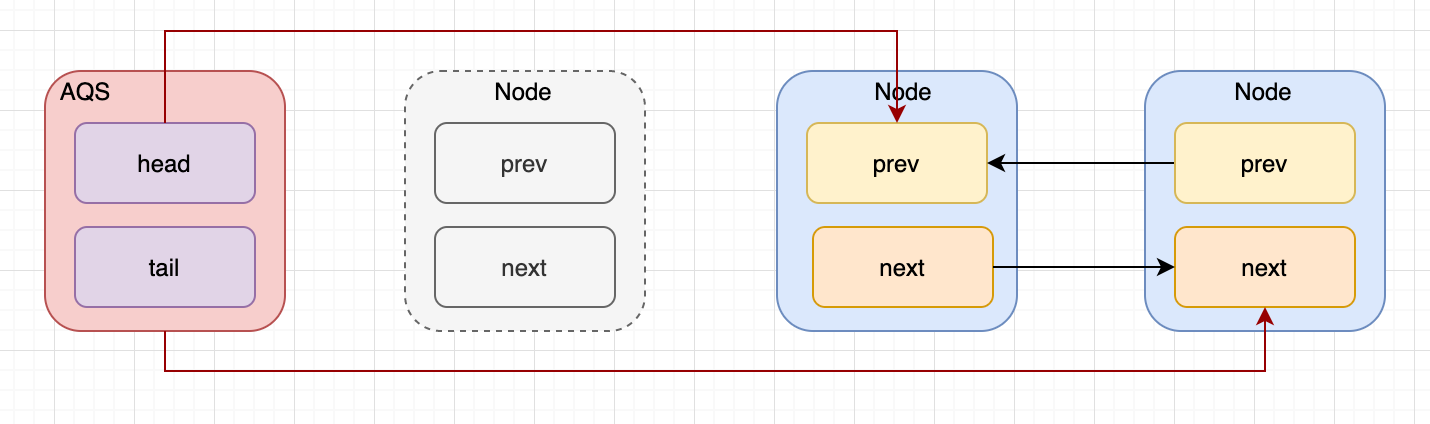
AQS-ReentrantLock
一、AQS 在 Lock 中,用到了一个同步队列 AQS,全称 AbstractQueuedSynchronizer,它是一个同步工具,也是 Lock 用来实现线程同步的核心组件。 1.AQS 的两种功能 独占和共享。 独占锁:每次只能有一个线程持有锁&#x…...

SpringCloud+Dubbo3 = 王炸 !
前言 全链路异步化的大趋势来了 随着业务的发展,微服务应用的流量越来越大,使用到的资源也越来越多。 在微服务架构下,大量的应用都是 SpringCloud 分布式架构,这种架构总体上是全链路同步模式。 全链路同步模式不仅造成了资源…...
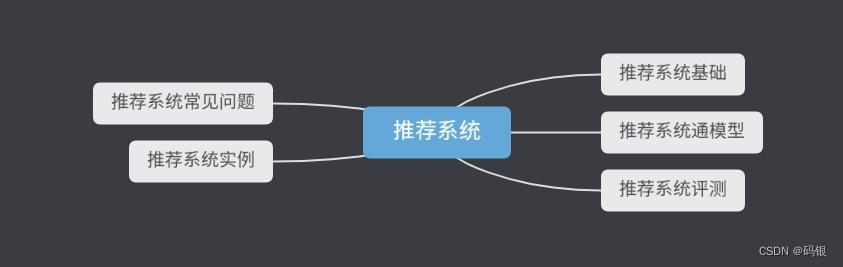
机器学习主要内容的思维导图
机器学习 机器学习: 定义:能够从经验中学习从而能够 把事情不断做好的计算机程序 人工智能的一个分支和 实现方式 理论基础:概率论 数理统计 线性代数 数学分析 数值逼近 最优化理论 计算复杂理论 核心要素:数据 算法 模型 机器…...

嵌套走马灯Carousel
Carousel 的应用很广泛,基础用法这里不多做阐述,感兴趣的可以去element-gui了解Carousel 组件。 今天主要是梳理嵌套走马灯的逻辑,背景如下: 需要对项目做一个展示,项目可能有一个或多个,同时一个项目可能…...
实战——缓存的使用
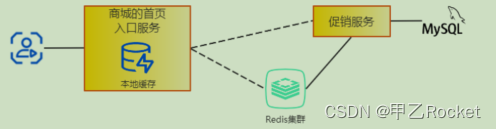
文章目录前言概述实践一、缓存数据一致1.更新缓存类2.删除缓存类二、项目实践(商城项目)缓存预热双缓存机制前言 对于我们日常开发的应用系统。由于MySQL等关系型数据库读写的并发量是有一定的上线的,当请求量过大时候那数据库的压力一定会上…...

2023年中职网络安全竞赛跨站脚本渗透解析-2(超详细)
跨站脚本渗透 任务环境说明:需求环境可私信博主! 服务器场景:Server2126(关闭链接)服务器场景操作系统:未知访问服务器网站目录1,根据页面信息完成条件,将获取到弹框信息作为flag提交;访问服务器网站目录2,根据页面信息完成条件,将获取到弹框信息作为flag提交;访问…...

Scala的简单使用
文章目录Scala的简单使用(一)交互模式1、命令行方式2、文件方式(二)编译模式1、创建源程序2、编译成字节码3、解释执行对象Scala的简单使用 Scala可以在交互模式和编译模式两种方式下运行 (一)交互模式 在…...
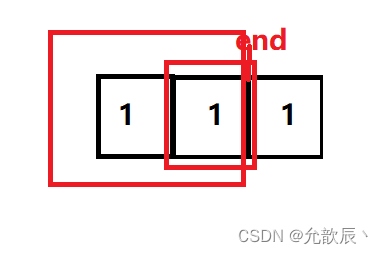
Java之前缀和算法
目录 一.前缀和 1.前缀和介绍 2.编程中的前缀和 二.一维数组的动态和 1.题目描述 2.问题分析 3.代码实现 三.除自身以外数组的乘积 1.题目描述 2.问题分析 3.代码实现 四.和为 K 的子数组 1.题目描述 2.问题分析 3.代码实现 五.形成两个异或相等数组的三元组数目…...
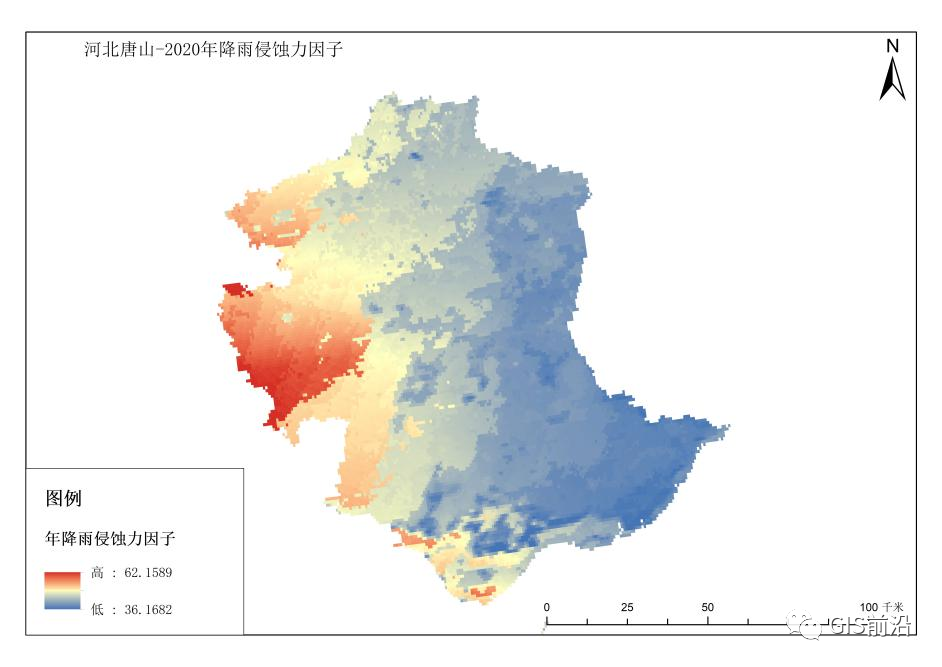
基于GIS计算降雨侵蚀力R因子
一、数据来源介绍 (一)行政边界数据 本文所用到的河北唐山行政边界数据来源于中国科学院资源环境科学与数据中心(https://www.resdc.cn/Default.aspx)。 (二)降水量数据 本文所用到的降水量数据来源于国家…...

大数据时代下的企业网络安全
在大数据技术迅猛发展的今天,网络安全问题已经发展成一个广受关注的热门研究方向。有人说,“大数据下,人人裸奔”,隐私保护、数据防护日益成为广大学者、企业研究的焦点。 面对这种安全威胁,企业必须实施一些有效的信…...

【跟我一起读《视觉惯性SLAM理论与源码解析》】第三章第四章 SLAM中常用的数学基础知识相机成像模型
齐次坐标能大大简化在三维空间中点、线、面表达方式和旋转、平移等操作在齐次坐标下,两个点的叉积结果可以表示一条直线l;也可以用两条直线的叉积结果表示它们的齐次坐标交点,关于叉积其实十四讲解释的还是比较清楚的,和李代数李群的关系可以…...

LeetCode 242. 有效的字母异位词
242. 有效的字母异位词 难度:easy\color{Green}{easy}easy 题目描述 给定两个字符串 sss 和 ttt ,编写一个函数来判断 ttt 是否是 sss 的字母异位词。 注意: 若 sss 和 ttt 中每个字符出现的次数都相同,则称 sss 和 ttt 互为字…...

力扣mysql刷题记录
mysql刷题记录 刷题链接https://leetcode.cn/study-plan/sql/?progressjkih0qc mysql冲!mysql刷题记录1699. 两人之间的通话次数1251. 平均售价1571. 仓库经理1445. 苹果和桔子1193. 每月交易 I1633. 各赛事的用户注册率1173. 即时食物配送 I1211. 查询结果的质量…...

Linux基础命令-lsof查看进程打开的文件
Linux基础命令-uptime查看系统负载 Linux基础命令-top实时显示系统状态 Linux基础命令-ps查看进程状态 文件目录 前言 一 命令的介绍 二 语法及参数 2.1 使用help查看命令的语法信息 2.2 常用参数 2.2.lsof命令-i参数的条件 三 命令显示内容的含义 3.1 FD 文件描述符的…...

常用电平标准
现在常用的电平标准有TTL CMOS LVTTL LVCMOS LVDS PCI等,下面简单介绍一下各自的供电电源、电平标准及注意事项数字电路中,由TTL电子元件组成电路使用的电平。电平是个电压范围。标准输出高电平(VOH): 2.4V标准输出低电平(VOL):0.4V通常输出高…...

LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 [特殊字符]
LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 🎯 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 还在为复盘找不到关键点而烦恼吗?想提升棋力却…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器
HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III地图编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hiv…...

3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行
3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or KernelSU (root so…...

5分钟免费搞定HS2汉化:Honey Select 2完整中文补丁终极教程
5分钟免费搞定HS2汉化:Honey Select 2完整中文补丁终极教程 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 还在为Honey Select 2的日文界面而烦恼吗…...

结肠“瑞士卷”制片法
在肠道病理研究中,如何完整保留小鼠结肠的全层结构、同时避免人为损伤,一直是实验操作的难点。本文分享一套改良版“瑞士卷”制片技术,无需剖开肠管、无需机械顶压,即可获得高质量的全结肠切片,特别适合炎症、隐窝异常…...

安卓用户如何免费获取大模型API密钥并开始调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 安卓用户如何免费获取大模型API密钥并开始调用 对于安卓开发者或移动端技术爱好者而言,直接体验和调用多种大模型的能力…...

如何快速上手SoundMind:10分钟完成音频逻辑推理模型训练
如何快速上手SoundMind:10分钟完成音频逻辑推理模型训练 【免费下载链接】SoundMind We introduce the Audio Logical Reasoning (ALR) dataset, consisting of 6,446 text-audio annotated samples specifically designed for complex reasoning tasks. Building o…...

如何永久保存微信聊天记录?WeChatMsg数据导出完整指南
如何永久保存微信聊天记录?WeChatMsg数据导出完整指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeCha…...

安卓逆向实战:用frida-dexdump精准提取加固App运行时Dex
1. 这不是“脱壳”,是逆向工程里最该被正名的基础动作很多人一听到“砸壳”就想到黑产、盗版、破解,甚至有些团队内部文档里都刻意回避这个词,改用“Dex文件提取”“运行时内存Dump”这类听起来更“体面”的说法。但实话讲,在安卓…...