香橙派使用外设驱动库wiringOP 配合定时器来驱动舵机
舵机认识和硬件接线
关于舵机也是使用过很多次了,详见:
使用PWM波控制开发SG90-CSDN博客
同时再次回顾香橙派的物理引脚对应:
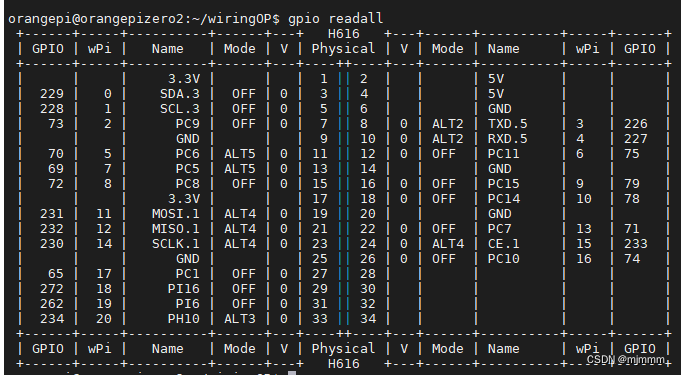

所以舵机的VCC接 2,GND接 6,PWM接 7(此处写的是物理引脚编号)

Linux定时器
驱动舵机必不可少的就是生成PWM波,上节超声波测距的时间计算学习了Linux自带的时间函数,本节生成PWM就正式学习香橙派的定时器,用定时器来生成PWM波!
由于香橙派跑的系统就是Linux,所以其实就是使用Linux来实现定时器,根据舵机的原理,一般使用50Hz频率(周期为20ms)的PWM波来控制,而角度的大小就取决于高电平的占比,20ms中有0.5ms,1.0ms,1.5ms,2.0ms,2.5ms的高电平就分别对应舵机转0度,45度,90度,135度,180度。所以本质上,只要能实现出一个定时0.5ms(500us)的定时器,并让他定时1次,2次,3次,4次,5次就可以实现所有的角度。
Linux定时器的实现,是通过 itimerval 结构体以及函数 setitimer 产生的信号,系统随之使用signal信号处理函数 来处理产生的定时信号,从而实现定时器。
itimerval结构体
struct itimerval
{
/* Value to put into `it_value' when the timer expires. */struct timeval it_interval;
/* Time to the next timer expiration. */struct timeval it_value;
};struct timeval
{__time_t tv_sec; /* Seconds. */__suseconds_t tv_usec; /* Microseconds. */
};
可见,itimerval结构体中有两个成员,这两个成员都属于timeval结构体,timeval结构体上节课接触过,有两个分别代表秒和微秒的成员。
- it_interval:计时器的初始值,一般基于这个初始值来加或者来减,看控制函数的参数配置
- it_value:程序跑到这之后,多久启动定时器
setitimer函数
setitimer()将value指向的结构体设为计时器的当前值,如果ovalue不是NULL,将返回计时器原有值
#include <sys/time.h>int setitimer (__itimer_which_t __which, const struct itimerval *__restrict __new, struct itimerval *__restrict __old)
- which:控制的方法,有以下三种类型
- ITIMER_REAL //数值为0,计时器的值实时递减,发送的信号是SIGALRM
- ITIMER_VIRTUAL //数值为1,进程执行时递减计时器的值,发送的信号是SIGVTALRM
- ITIMER_PROF //数值为2,进程和系统执行时都递减计时器的值,发送的信号是SIGPROF
- new:指向 itimerval 结构体的指针
- old: 一般不用,设置为NULL
- 返回值:成功返回0,失败返回-1
signal函数
之前在系统编程部分学过,详见:
信号-CSDN博客
#include <signal.h>typedef void (*sighandler_t)(int); //一个指向“传入参数是int 返回值是void的函数”,名为“sighandler_t”的指针sighandler_t signal(int signum, sighandler_t handler);- signum:信号编号
- handler:函数指针,指向信号处理函数;也可以使用宏,比如使用“SIG_IGN”,则忽略信号
这种方法需要注意的是,一个进程只能创建一个定时器!
代码验证
timer_test.c:
/*该代码实现的功能是: 1s后开启定时器,然后每隔1s向终端打印hello。*/#include <stdio.h>
#include <sys/time.h>
#include <signal.h>
#include <stdlib.h>static int i;void signal_handler(int signum)
{i++;if(i == 2000){ //计时2000*500 = 1000000us = 1sprintf("hello\n");i = 0;}
}int main()
{struct itimerval itv;//设定定时时间为500usitv.it_interval.tv_sec = 0;itv.it_interval.tv_usec = 500;//设定开始生效,启动定时器的时间为1秒后itv.it_value.tv_sec = 1;itv.it_value.tv_usec = 0;//设定定时方式if( -1 == setitimer(ITIMER_REAL, &itv, NULL)){perror("timer");exit(-1);}//信号处理signal(SIGALRM,signal_handler);while(1); //防止程序退出return 0;
}
代码编写
SG90_test.c:
#include <stdio.h>
#include <sys/time.h>
#include <signal.h>
#include <stdlib.h>
#include <wiringPi.h>#define PWM 2int angle;
static int i;void signal_handler(int signum)
{if(i <= angle){digitalWrite(PWM, HIGH);}else{digitalWrite(PWM, LOW);}if(i == 40){ //40*500 = 20000us = 20msi = 0;}i++;}int main()
{struct itimerval itv;wiringPiSetup () ;pinMode (PWM, OUTPUT);//设定定时时间itv.it_interval.tv_sec = 0;itv.it_interval.tv_usec = 500;//设定开始生效,启动定时器的时间itv.it_value.tv_sec = 1;itv.it_value.tv_usec = 0;//设定定时方式if( -1 == setitimer(ITIMER_REAL, &itv, NULL)){perror("error");exit(-1);}//信号处理signal(SIGALRM,signal_handler);while(1){printf("enter the angle: 1 -> 0; 2 -> 45; 3 -> 90; 4 -> 135; 5 -> 180\n");scanf("%d",&angle);i = 0;}return 0;实现效果:
在Linux界面输入角度值,舵机就会相应的转动多少度:
(缠黑纱绑带的一段视为方向指示端)
相关文章:
香橙派使用外设驱动库wiringOP 配合定时器来驱动舵机
舵机认识和硬件接线 关于舵机也是使用过很多次了,详见: 使用PWM波控制开发SG90-CSDN博客 同时再次回顾香橙派的物理引脚对应: 所以舵机的VCC接 2,GND接 6,PWM接 7(此处写的是物理引脚编号) Li…...
C++学习笔记--函数重载(2)
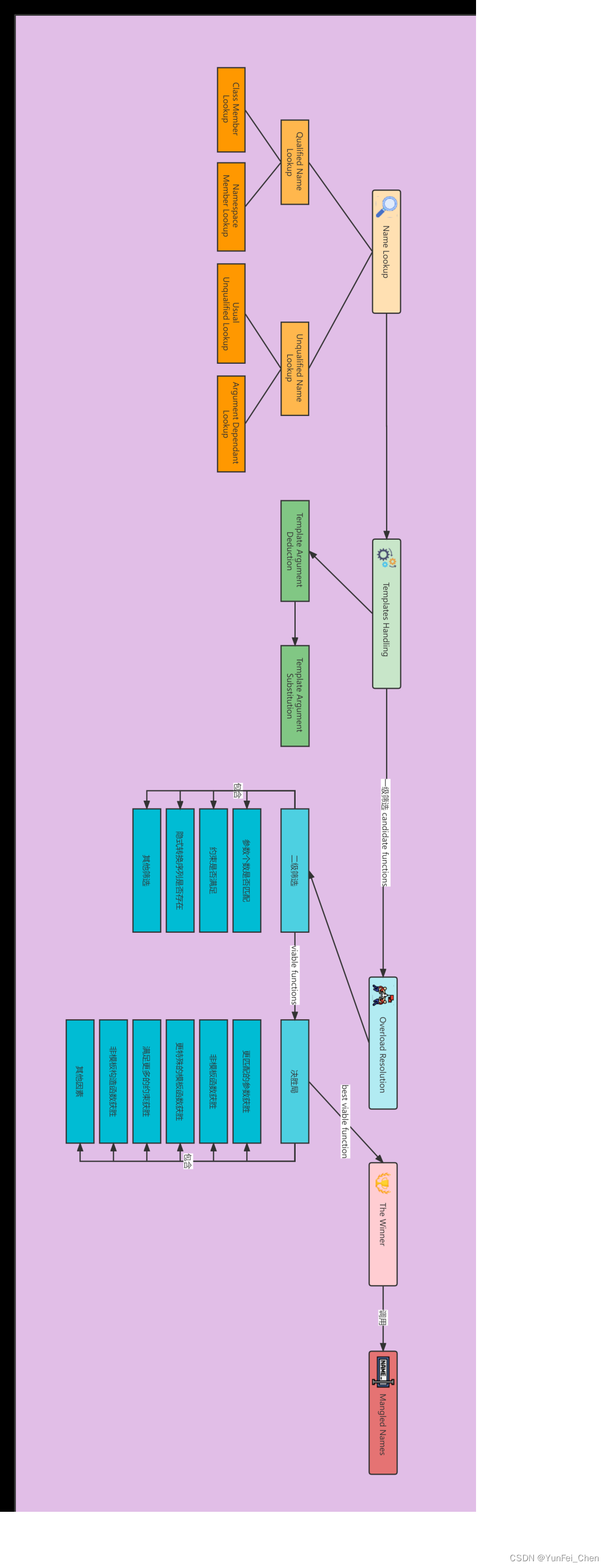
文章目录 1.3、Function Templates Handling1.3.1、Template Argument Deduction1.3.2、Template Argument Substitution 1.4、Overload Resolution1.4.1、Candidate functions1.4.2、Viable functions1.4.3、Tiebreakers 1.5、走一遍完整的流程1.6、Name Mangling1.7、总结 1.…...

代码随想录算法训练营Day56 || ● 583. 两个字符串的删除操作 ● 72. 编辑距离
今天接触到了真正的距离,但可以通过增删改操作来逼近。 问题1:583. 两个字符串的删除操作 - 力扣(LeetCode) 给定两个单词 word1 和 word2 ,返回使得 word1 和 word2 相同所需的最小步数。 每步 可以删除任意一个字…...

chrome_elf.dll丢失怎么办?修复chrome_elf.dll文件的方法
Chrome是目前最受欢迎的网络浏览器之一,然而有时用户可能会遇到Chrome_elf.dll丢失的问题。该DLL文件是Chrome浏览器的一个重要组成部分,负责启动和管理程序的各种功能。当Chrome_elf.dll丢失时,用户可能无法正常启动Chrome或执行某些功能。本…...

代码随想录32|738.单调递增的数字,968.监控二叉树,56. 合并区间
738.单调递增的数字 链接地址 class Solution { public:int monotoneIncreasingDigits(int n) {string str to_string(n);int flag str.size();for (int i str.size() - 1; i > 0; i--) {if (str[i] < str[i - 1]) {str[i - 1] - 1;flag i;}}for (int j flag; j <…...
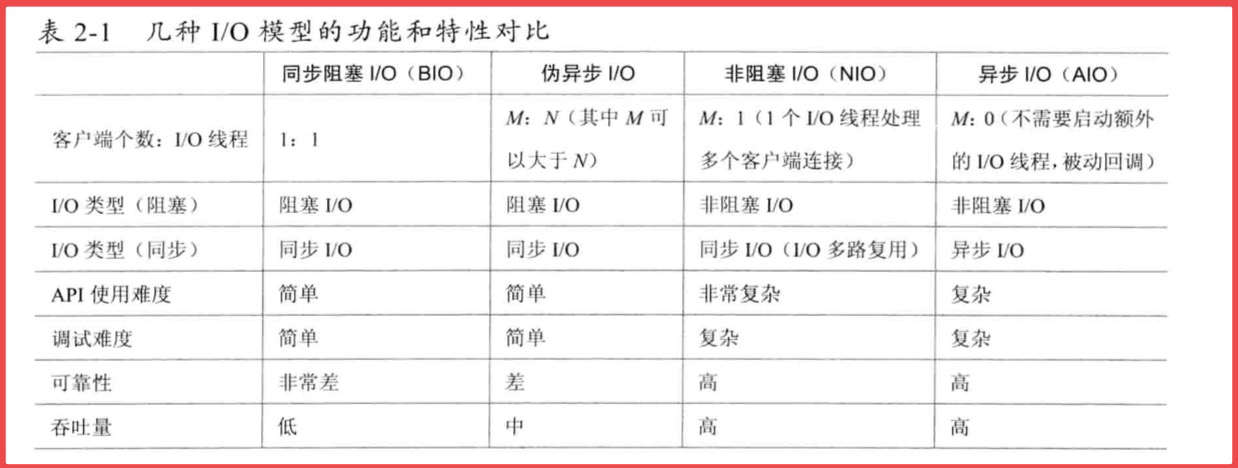
BIO NIO AIO演变
Netty是一个提供异步事件驱动的网络应用框架,用以快速开发高性能、高可靠的网络服务器和客户端程序。Netty简化了网络程序的开发,是很多框架和公司都在使用的技术。 Netty并非横空出世,它是在BIO,NIO,AIO演变中的产物…...
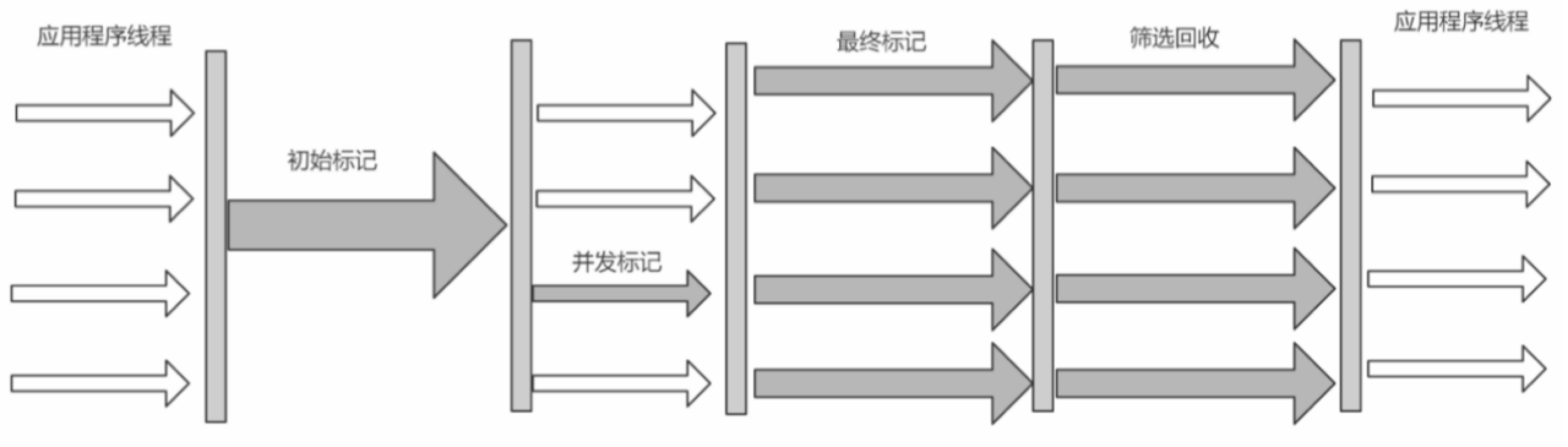
JVM GC垃圾回收
一、GC垃圾回收算法 标记-清除算法 算法分为“标记”和“清除”阶段:标记存活的对象, 统一回收所有未被标记的对象(一般选择这种);也可以反过来,标记出所有需要回收的对象,在标记完成后统一回收所有被标记的对象 。它…...

【数据结构】队列知识点总结--定义;基本操作;队列的顺序实现;链式存储;双端队列;循环队列
欢迎各位看官^_^ 目录 1.队列的定义 2.队列的基本操作 2.1初始化队列 2.2判断队列是否为空 2.3判断队列是否已满 2.4入队 2.5出队 2.6完整代码 3.队列的顺序实现 4.队列的链式存储 5.双端队列 6.循环队列 1.队列的定义 队列(Queue)是一种先…...

嵌入式学习之链表
对于链表,要重点掌握链表和数组区别和实现,链表静态添加和动态遍历,链表中pointpoint-next,链表节点个数的查找,以及链表从指定节点后方插入新节点的知识。...
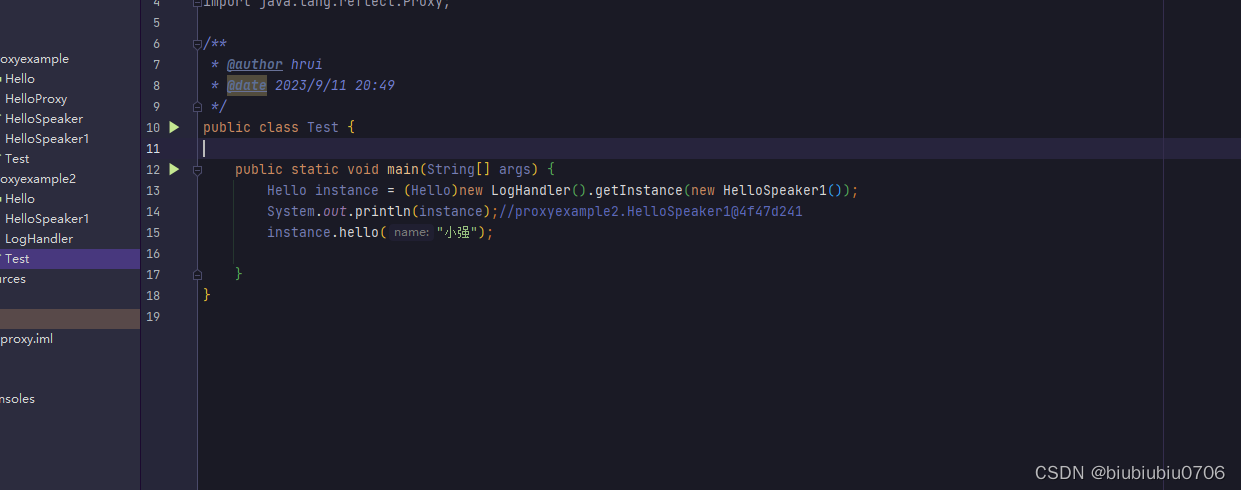
静态代理和动态代理笔记
总体分为: 1.静态代理: 代理类和被代理类需要实现同一个接口.在代理类中初始化被代理类对象.在代理类的方法中调 用被代理类的方法.可以选择性的在该方法执行前后增加功能或者控制访问 2.动态代理: 在程序执行过程中,实用JDK的反射机制,创建代理对象,并动态的指定要…...

[SM6225][Android13]user版本默认允许root和remount
开发平台基本信息 芯片: 高通SM6225版本: Android 13kernel: msm-5.15 问题描述 刚刚从Framework踏入性能的小殿堂,User版本默认是不会开启root权限的,而且一般调试需要设置一下CPU GPU DDR performance模式或者修改一些schedule util等调核调频节点去…...

pyinstaller打包exe,使用wexpect的问题
参考github首先打包wexpect 1.进入wexpect目录执行 pyinstaller __main__.py -n wexpect 会生成dist文件夹 2.python代码A.py中使用wexpect,注意wexpect.spawn前后必须按照下面添加代码 import sys,os,wexpect #spawn前 real_executable sys.executable try:if sy…...
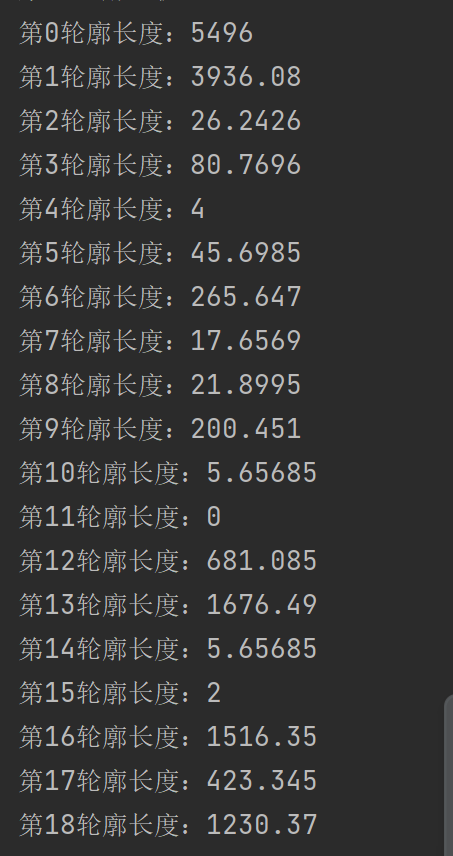
OpenCV(三十三):计算轮廓面积与轮廓长度
1.介绍轮廓面积与轮廓长度 轮廓面积(Contour Area)是指轮廓所包围的区域的总面积。通常情况下,轮廓面积的单位是像素的平方。 轮廓长度(Contour Length)又称周长(Perimeter),表示轮廓…...
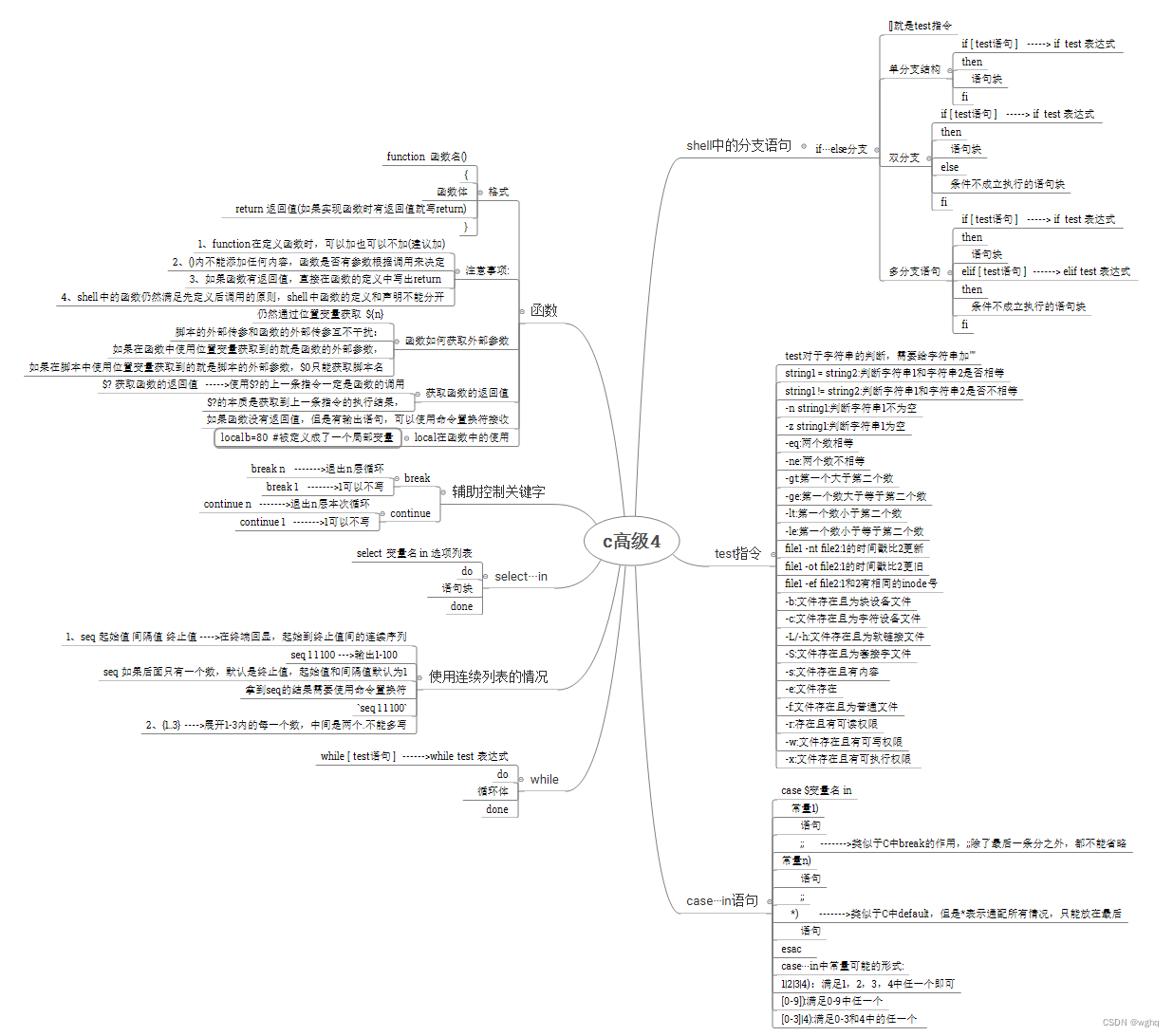
9.11作业
实现一个对数组求和的函数,数组通过实参传递给函数 sum0 arr(11 22 33 44 55) Sum() {for i in ${arr[*]}do$((sumi))donereturn $sum } Sum ${arr[*]} var$? echo $var写一个函数,输出当前用户的uid和gid,并使用变量接收结果 Sum() {aid -…...

AI伦理与未来社会:探讨人工智能的道德挑战与机会
引言 引出AI伦理和社会影响的主题,强调AI的快速发展和广泛应用。 概述博客的主要内容:探讨AI的伦理挑战以及它对社会的影响。 第一部分:AI的伦理挑战 算法偏见: 解释什么是算法偏见,以及它为何在AI中成为一个重要问题。…...
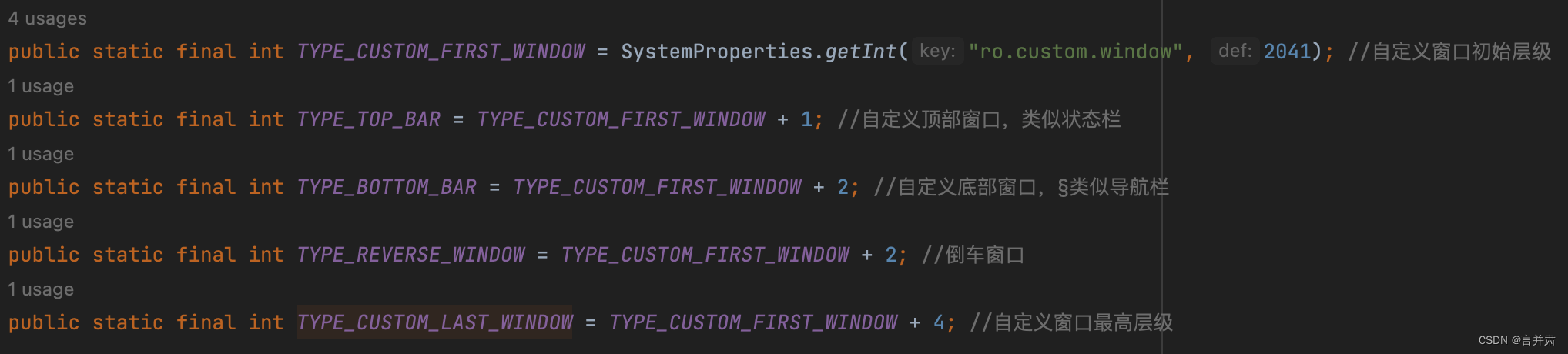
Android窗口层级(Window Type)分析
前言 Android的窗口Window分为三种类型: 应用Window,比如Activity、Dialog;子Window,比如PopupWindow;系统Window,比如Toast、系统状态栏、导航栏等等。 应用Window的Z-Ordered最低,就是在系…...
微信小程序基础加强总结
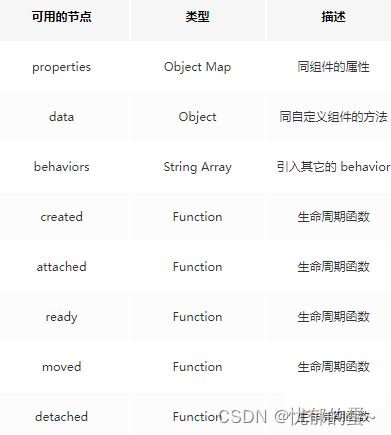
本篇文章给大家带来了关于微信小程序的相关问题,其中主要介绍了一些基础内容,包括了自定义组件、样式隔离、数据、方法和属性等等内容,下面一起来看一下,希望对大家有帮助。 1、自定义组件 1.1、创建组件 在项目的根目录中&…...
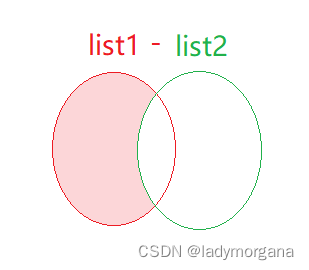
【JAVA - List】差集removeAll() 四种方法实现与优化
一、场景: 二、结论: 1. 四种方法耗时 三、代码: 一、场景: 求差集 List1 - Lsit2 二、结论: 1. 四种方法耗时 初始条件方法名方法思路耗时 List1.size319418 List2.size284900 List..removeAll(Lsit2)1036987ms…...
sql注入基本概念
死在山野的风里,活在自由的梦里 sql注入基本概念 MYSQL基本语法union合并查询2个特性:order by 排序三个重要的信息 Sql Server MYSQL 基本语法 登录 mysql -h ip -u user -p pass基本操作 show databases; 查看数据库crea…...

AIGC系列:1.chatgpt可以用来做哪些事情?
上图的意思:神器轩辕剑 那么,在现在AI盛行的信息时代, 你是否知道如何获得和利用ChatGPT这一把轩辕剑来提升你的攻击力和生存能力呢? 故事 程序员小张: 刚毕业,参加工作1年左右,日常工作是C…...

Photoshop图层批量导出终极指南:如何用免费脚本实现10倍效率提升
Photoshop图层批量导出终极指南:如何用免费脚本实现10倍效率提升 【免费下载链接】Photoshop-Export-Layers-to-Files-Fast This script allows you to export your layers as individual files at a speed much faster than the built-in script from Adobe. 项目…...
入队出队)
链式队列:高效实现O(1)入队出队
引言在之前的文章中,我们系统学习了栈结构(顺序栈和链栈)。栈是"后进先出"(LIFO)的结构,而今天要讲解的队列(Queue)则是"先进先出"(FIFO,…...

作为一名大二学生对于Vibe Coding的理解
🌈 个人主页: Hygge_Code 🔥 热门专栏:从0开始学习Java | Linux学习 | 计算机网络 💫 个人格言: “既然选择了远方,便不顾风雨兼程” 文章目录关于Vibe Coding前言什么是Vibe Coding(氛围感编程)? &#x…...

如何高效管理学术引用数据:Zotero智能统计插件完整指南
如何高效管理学术引用数据:Zotero智能统计插件完整指南 【免费下载链接】zotero-citationcounts Zotero plugin for auto-fetching citation counts from various sources 项目地址: https://gitcode.com/gh_mirrors/zo/zotero-citationcounts 如果你是一位研…...

Python异步Web框架SerpentStack:高性能API服务开发指南
1. 项目概述:SerpentStack,一个被低估的Python异步Web框架最近在GitHub上闲逛,又看到了一个名为“SerpentStack”的Python Web框架项目,作者是Benja-Pauls。说实话,第一眼看到这个名字,我差点把它归为又一个…...

第三方令牌泄露引发的供应链数据泄露治理研究 —— 以 Zara 事件为例
摘要 2026 年 4 月,黑客组织 ShinyHunters 通过入侵云分析服务商 Anodot 并窃取其身份认证令牌,非法访问下游多家企业云数据平台,导致快时尚品牌 Zara 近 19.7 万名用户信息泄露,泄露字段含电子邮箱、订单 ID、商品 SKU 及客服工单…...

如何利用FanControl.HWInfo插件实现精准风扇控制:终极配置指南
如何利用FanControl.HWInfo插件实现精准风扇控制:终极配置指南 【免费下载链接】FanControl.HWInfo FanControl plugin to import HWInfo sensors. 项目地址: https://gitcode.com/gh_mirrors/fa/FanControl.HWInfo 想要彻底解决电脑风扇噪音与散热平衡的难题…...

ETS2LA:欧洲卡车模拟2自动驾驶插件的完整指南
ETS2LA:欧洲卡车模拟2自动驾驶插件的完整指南 【免费下载链接】Euro-Truck-Simulator-2-Lane-Assist Plugin based interface program for ETS2/ATS. 项目地址: https://gitcode.com/gh_mirrors/eur/Euro-Truck-Simulator-2-Lane-Assist 你是否曾经在长途运输…...

IO-Link技术解析:工业自动化通信与LTC2874/LT3669芯片应用
1. IO-Link技术概述:工业自动化的神经末梢在工业4.0的浪潮中,设备间的实时通信如同工厂的神经系统。IO-Link作为这个系统中的"神经末梢",实现了控制层与现场设备间的最后一米连接。这项技术最早由PROFIBUS用户组织在2009年推出&…...

基于Petals分布式网络的大语言模型聊天应用后端部署与API调用实战
1. 项目概述:一个基于分布式协作的大语言模型聊天应用后端最近在折腾大语言模型应用的时候,发现了一个挺有意思的项目:chat.petals.dev。这不仅仅是一个开源的聊天机器人Web应用,更关键的是,它背后连接着一个名为Petal…...