深入浅出C++ ——手撕AVL树
文章目录
- 前言
- 一、AVL 树介绍
- 二、AVL树节点的定义
- 三、AVL树的插入
- 四、AVL树的旋转
- 五、AVL树的验证
- 六、AVL树的删除
- 七、AVL树的性能
- 八、AVL树的实现
前言
在前面的文章中介绍了map / multimap / set / multiset 容器,这几个容器的底层都是按照二叉搜索树来实现的。但是二叉搜索树有其自身的缺陷,假如往树中插入的元素有序或者接近有序,二叉搜索树就会退化成单支树,时间复杂度会退化成O(N)。因此 map、set 等关联式容器的底层结构是对二叉树进行了平衡处理,即采用平衡树来实现。
一、AVL 树介绍
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
AVL树是一棵二叉搜索树,且高度平衡,因此AVL树也叫高度平衡二叉搜索树。如果AVL树有n个结点,其 高度可保持在O(log2N)O(log_2 N)O(log2N),搜索时间复杂度O(log2N)O(log_2 N)O(log2N)。
AVL树的性质
- 任意一颗子树的左右子树都是AVL树
- 任意一颗子树的左右子树高度之差(简称平衡因子)的绝对值不超过1
二、AVL树节点的定义
template<class K, class V>
struct AVLTreeNode
{AVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}AVLTreeNode<K, V>* _left; // 该节点的左孩子AVLTreeNode<K, V>* _right; // 该节点的右孩子AVLTreeNode<K, V>* _parent; // 该节点的双亲pair<K, V> _kv;int _bf; // 该节点的平衡因子
};
三、AVL树的插入
AVL树的插入过程可以分为两步:
- 先按照二叉搜索树的规则将节点插入到AVL树中
- 新节点插入后,AVL树的平衡性可能会遭到破坏,此时就需要更新平衡因子,并检测是否破坏了AVL树的平衡性。
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;// 找插入节点的位置while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}// 插入节点cur = new Node(kv);// 链接cur和parentif (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;// 控制平衡while (parent) //最坏的情况是更新到根才会停止{// 更新平衡因子。新增在右,parent的平衡因子++ ;新增在左,parent的平衡因子--if (cur == parent->_right)parent->_bf++;elseparent->_bf--;if (parent->_bf == 0)//更新后,parent的平衡因子为0,说明插入后两边一样高,插入填入了矮的部分,parent所在子树高度不变,不需要继续往上更新。{break;}else if (abs(parent->_bf) == 1)//更新后,abs(parent的平衡因子)为1,说明插入后有一边高,parent所在子树高度变了,需要继续往上更新。{parent = parent->_parent;cur = cur->_parent;}else if (abs(parent->_bf) == 2)//更新后,abs(parent的平衡因子)为2,说明已经打破平衡,parent所在子树需要旋转处理。{if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if ((parent->_bf == -2 && cur->_bf == -1)){RotateR(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else{assert(false);}break; //一次插入只会有一次旋转,旋转完成了直接break}else //更新后,abs(parent的平衡因子)大于2,说明插入前就不是AVL树,需要检查之前的操作{assert(false);}}return true;
}
四、AVL树的旋转
旋转原则:1. 旋转为平衡树 2. 保持搜索树规则
新节点插入较高右子树的右侧—右右:左单旋

// 新节点插入较高右子树的右侧---右右:左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) //subRL可能为空subRL->_parent = parent;Node* ppNode = parent->_parent; //注意:有可能parent不是根节点,保存上一层节点subR->_left = parent;parent->_parent = subR;if (_root == parent) //parent是整棵树的根{_root = subR;subR->_parent = nullptr;}else //parent是子树的根{if (ppNode->_left == parent)//判断上一层节点和parent的关系{ppNode->_left = subR;}else{ppNode->_right = subR;}subR->_parent = ppNode;}subR->_bf = parent->_bf = 0; //修改平衡因子
}
新节点插入较高左子树的左侧—左左:右单旋
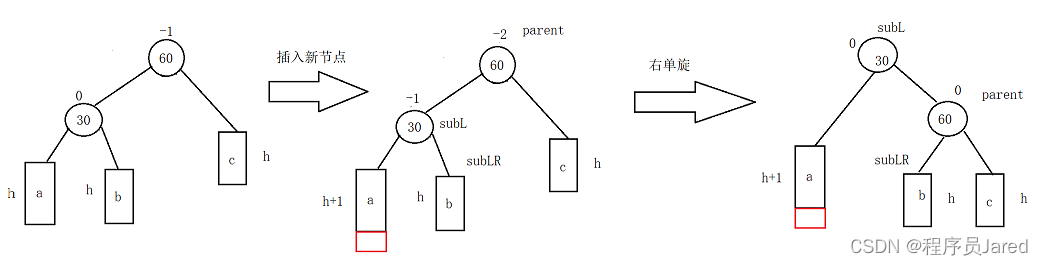
// 新节点插入较高左子树的左侧---左左:右单旋
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subL;}else{ppNode->_right = subL;}subL->_parent = ppNode;}subL->_bf = parent->_bf = 0;
}
新节点插入较高左子树的右侧—左右:先左单旋再右单旋
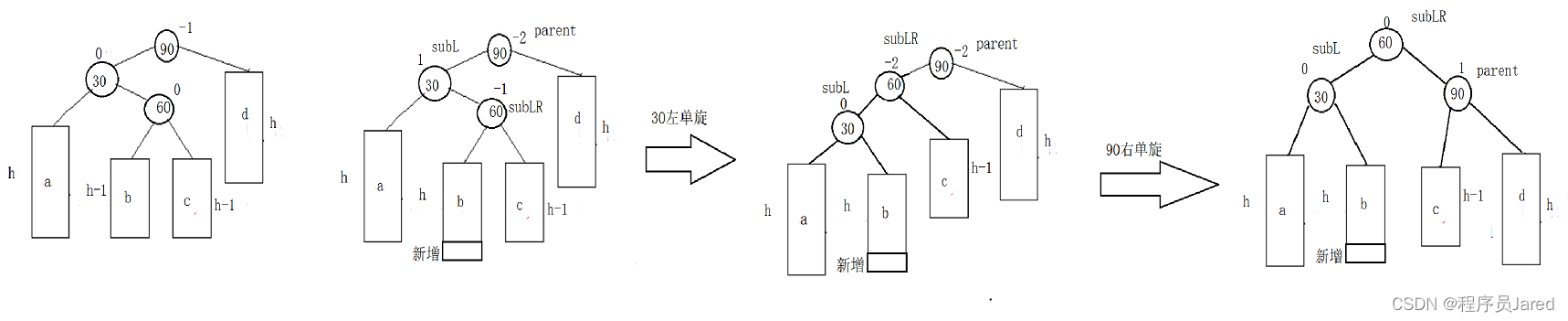
在b或者c的位置插入,都会引起bf的变化,引发双旋。将双旋变成单旋后再旋转,即:先对30进行左单旋,然后再对90进行右单旋,旋转完成后再考虑平衡因子的更新。
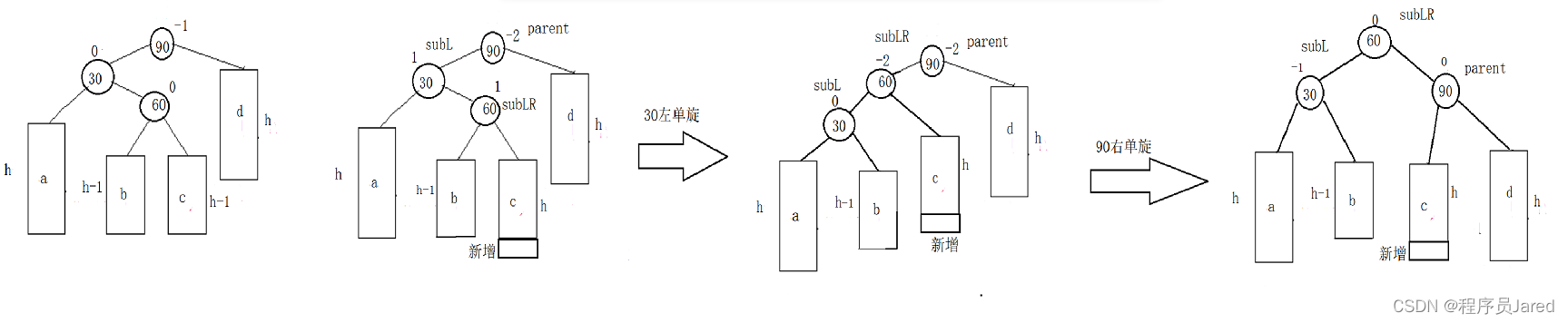
// 新节点插入较高左子树的右侧---左右:先左单旋再右单旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf; //记录subLR的平衡因子,根据它的大小将其他平衡因子的更新分为三种情况RotateL(parent->_left); // 先cur左旋再parent右旋RotateR(parent);subLR->_bf = 0;if (bf == 1) // c插入{parent->_bf = 0;subL->_bf = -1;}else if (bf == -1) // b插入{parent->_bf = 1;subL->_bf = 0;}else if (bf == 0) //a,b,c,d为空树,subLR为新增{parent->_bf = 0;subL->_bf = 0;}else // 说明出问题了{assert(false);}
}
新节点插入较高右子树的左侧—右左:先右单旋再左单旋
整体思路同上:
//新节点插入较高右子树的左侧——右左:先右单旋再左单旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);subRL->_bf = 0;if (bf == 1){subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;}else if (bf == 0){parent->_bf = 0;subR->_bf = 0;}else{assert(false);}
}
总结
假如以Parent为根的子树不平衡,即Parent的平衡因子为2或者-2,分以下情况考虑:
- Parent的平衡因子为2,说明Parent的右子树高,设Parent的右子树的根为SubR。当SubR的平衡因子为1时,执行左单旋。当SubR的平衡因子为-1时,执行右左双旋。
- Parent的平衡因子为-2,说明Parent的左子树高,设Parent的左子树的根为SubL。当SubL的平衡因子为-1是,执行右单旋。当SubL的平衡因子为1时,执行左右双旋。
旋转完成后,原Parent为根的子树个高度降低,已经平衡,不需要再向上更新。
旋转的意义
- 平衡
- 降高度
五、AVL树的验证
验证其为二叉搜索树
如果中序遍历可得到一个有序的序列,就说明为二叉搜索树
public:void InOrder(){_InOrder(_root);cout << endl;}private:void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}
验证其为平衡树
每个节点子树高度差的绝对值不超过1,节点的平衡因子是否计算正确
public:bool IsBalance(){return _IsBalance(_root);}private:int Height(Node* root){if (root == nullptr)return 0;return max(Height(root->_left), Height(root->_right)) + 1;} bool _IsBalance(Node* root){if (root == nullptr){return true;}int leftHT = Height(root->_left);int rightHT = Height(root->_right);int diff = rightHT - leftHT;if (diff != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(diff) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}
六、AVL树的删除
因为AVL树也是二叉搜索树,可按照二叉搜索树的方式将节点删除,然后再更新平衡因子,只不错与删除不同的时,删除节点后的平衡因子更新,最差情况下一直要调整到根节点的位置。
七、AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度为O(log2N)O(log_2 N)O(log2N)。
但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。
因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的,可以考虑AVL树,但一个结构经常修改,就不太适合。
八、AVL树的实现
#include<iostream>
#include<assert.h>
#include <map>
#include <string>
#include <algorithm>
#include<time.h>
#include <assert.h>
using namespace std;template<class K, class V>
struct AVLTreeNode
{AVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}AVLTreeNode<K, V>* _left; // 该节点的左孩子AVLTreeNode<K, V>* _right; // 该节点的右孩子AVLTreeNode<K, V>* _parent; // 该节点的双亲pair<K, V> _kv;int _bf; // 该节点的平衡因子
};template<class K, class V>
struct AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;// 找插入节点的位置while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}// 插入节点cur = new Node(kv);// 链接cur和parentif (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;// 控制平衡while (parent) //最坏的情况是更新到根才会停止{// 更新平衡因子。新增在右,parent的平衡因子++ ;新增在左,parent的平衡因子--if (cur == parent->_right)parent->_bf++;elseparent->_bf--;if (parent->_bf == 0)//更新后,parent的平衡因子为0,说明插入后两边一样高,插入填入了矮的部分,parent所在子树高度不变,不需要继续往上更新。{break;}else if (abs(parent->_bf) == 1)//更新后,abs(parent的平衡因子)为1,说明插入后有一边高,parent所在子树高度变了,需要继续往上更新。{parent = parent->_parent;cur = cur->_parent;}else if (abs(parent->_bf) == 2)//更新后,abs(parent的平衡因子)为2,说明已经打破平衡,parent所在子树需要旋转处理。{if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if ((parent->_bf == -2 && cur->_bf == -1)){RotateR(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else{assert(false);}break; //一次插入只会有一次旋转,旋转完成了直接break}else //更新后,abs(parent的平衡因子)大于2,说明插入前就不是AVL树,需要检查之前的操作{assert(false);}}return true;}void InOrder(){_InOrder(_root);cout << endl;}bool IsBalance(){return _IsBalance(_root);}
private:bool _IsBalance(Node* root){if (root == nullptr){return true;}int leftHT = Height(root->_left);int rightHT = Height(root->_right);int diff = rightHT - leftHT;if (diff != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(diff) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}int Height(Node* root){if (root == nullptr)return 0;return max(Height(root->_left), Height(root->_right)) + 1;}// 新节点插入较高右子树的右侧---右右:左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) //subRL可能为空subRL->_parent = parent;Node* ppNode = parent->_parent; //注意:有可能parent不是根节点,保存上一层节点subR->_left = parent;parent->_parent = subR;if (_root == parent) //parent是整棵树的根{_root = subR;subR->_parent = nullptr;}else //parent是子树的根{if (ppNode->_left == parent)//判断上一层节点和parent的关系{ppNode->_left = subR;}else{ppNode->_right = subR;}subR->_parent = ppNode;}subR->_bf = parent->_bf = 0; //修改平衡因子}// 新节点插入较高左子树的左侧---左左:右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subL;}else{ppNode->_right = subL;}subL->_parent = ppNode;}subL->_bf = parent->_bf = 0;}// 新节点插入较高左子树的右侧---左右:先左单旋再右单旋void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf; //记录subLR的平衡因子,根据它的大小将其他平衡因子的更新分为三种情况RotateL(parent->_left); // 先cur左旋再parent右旋RotateR(parent);subLR->_bf = 0;if (bf == 1) // c插入{parent->_bf = 0;subL->_bf = -1;}else if (bf == -1) // b插入{parent->_bf = 1;subL->_bf = 0;}else if (bf == 0) //a,b,c,d为空树,subLR为新增{parent->_bf = 0;subL->_bf = 0;}else // 说明出问题了{assert(false);}}//新节点插入较高右子树的左侧——右左:先右单旋再左单旋void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);subRL->_bf = 0;if (bf == 1){subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;}else if (bf == 0){parent->_bf = 0;subR->_bf = 0;}else{assert(false);}}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}
private:Node* _root = nullptr;
};void TestAVLTree1()
{int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 }; // 测试双旋平衡因子调节//int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };AVLTree<int, int> t1;for (auto e : a){t1.Insert(make_pair(e, e));}t1.InOrder();cout << "IsBalance:" << t1.IsBalance() << endl;
}void TestAVLTree2()
{size_t N = 10000;srand(time(0));AVLTree<int, int> t1;for (size_t i = 0; i < N; ++i){int x = rand();t1.Insert(make_pair(x, i));}cout << "IsBalance:" << t1.IsBalance() << endl;
}
相关文章:
深入浅出C++ ——手撕AVL树
文章目录前言一、AVL 树介绍二、AVL树节点的定义三、AVL树的插入四、AVL树的旋转五、AVL树的验证六、AVL树的删除七、AVL树的性能八、AVL树的实现前言 在前面的文章中介绍了map / multimap / set / multiset 容器,这几个容器的底层都是按照二叉搜索树来实现的。但是…...
将多个springboot项目的pom.xml文件整合
将多个springboot项目的pom.xml文件整合 0.0、前因 刚入公司敲代码时、发现一个项目中会包含多个子项目、每个子项目会代表一个功能模块、这属实是把我这个菜鸟惊叹到了。而这种分而治之的方式也引申出一个问题:各子项目的依赖如何统一管理? 我…...

【Unity实战100例】Unity串口通讯的消息接收解析和发送指令
目录 一.串口通信介绍 1.串口通信 2.名词介绍 1.上位机: 2.下位机: 3.串行端口...
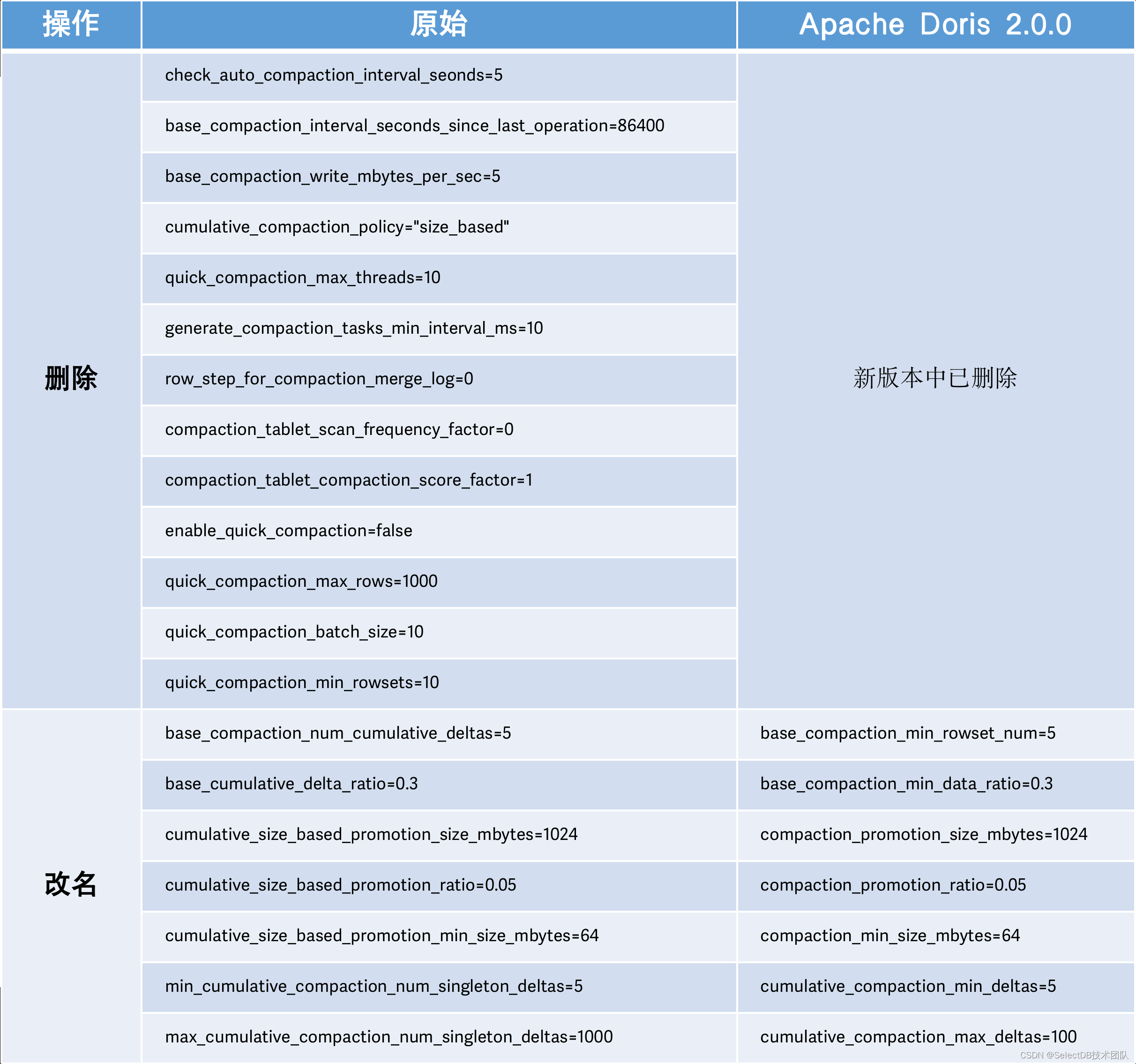
资源消耗降低 90%,速度提升 50%,解读 Apache Doris Compaction 最新优化与实现
背景LSM-Tree( Log Structured-Merge Tree)是数据库中最为常见的存储结构之一,其核心思想在于充分发挥磁盘连续读写的性能优势、以短时间的内存与 IO 的开销换取最大的写入性能,数据以 Append-only 的方式写入 Memtable、达到阈值…...
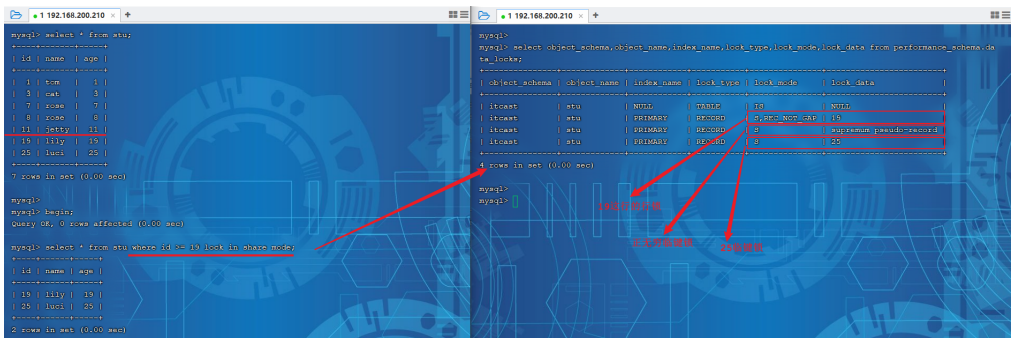
【Mysql】 锁
【Mysql】 锁 文章目录【Mysql】 锁1. 锁1.1 概述1.2 全局锁1.2.1 介绍1.2.2 语法1.2.2.1 加全局锁1.2.2.2 数据备份1.2.2.3 释放锁1.2.3 特点1.3 表级锁1.3.1 介绍1.3.2 表锁1.3.3 元数据锁1.3.4 意向锁1.4 行级锁1.4.1 介绍1.4.2 行锁1.4.3 间隙锁&临键锁1. 锁 1.1 概述…...
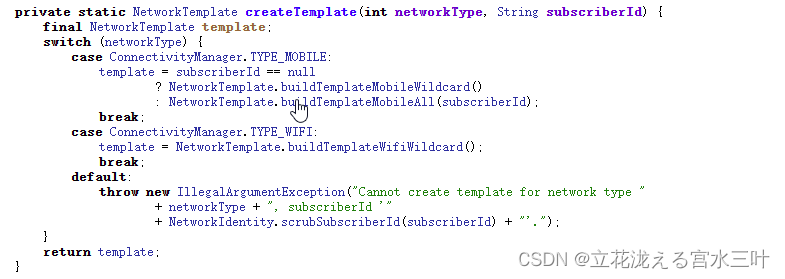
Android 流量统计
Android 流量统计最近项目上有一个应用流量统计的功能需要实现,在此总结一下 流量统计架构 在Android9.0之前,流量监控是基于xt_qtaguid模块的,通过读取/proc/net/xt_qtaguid/stats文件内容进行解析获取对应流量数据。 Android9.0之后&…...
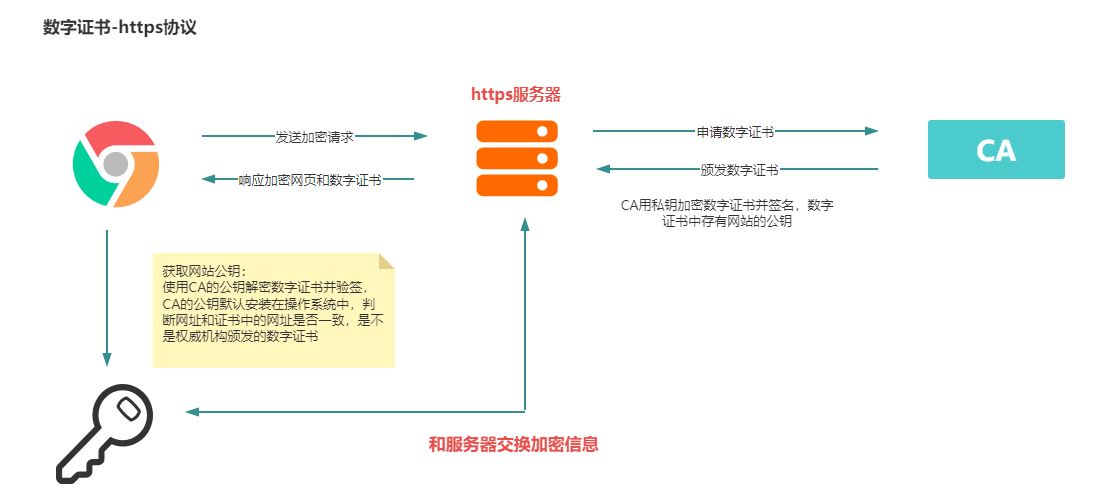
如何保证数据的安全?对称和非对称加密,身份认证,摘要算法,数字证书等傻傻分不清?波哥图解带你彻底掌握
支付安全 1.基础概念 明文:加密前的消息叫“明文”(plain text) 密文:加密后的文本叫“密文”(cipher text) 密钥:只有掌握特殊“钥匙”的人,才能对加密的文本进行解密,…...
计算机网络概述
目录前言计算机网络的形成<font colorblue>计算机定义与分类计算机网络的定义计算机网络的分类1.按网络的覆盖范围分类2.按网络采用的传输技术分类按网络的拓扑分类计算机网络的组成计算机网络体系结构层次结构体系ISO/OSI 参考模型Tcp/ip体系结构这就是计算机网络的基础…...

小学生学Arduino---------点阵(二)动态图片以及文字
今天进阶了利用人眼视觉暂留原理制作动态的图片变换。 1、熟练掌握图片显示器的使用 2、创作多种动态图片、文字的显示 3、明确动态图片、文字显示过程 4、掌握图片显示器中清空指令的使用 5、搭建动态图片、文字的显示电路 6、编写动态图片、文字的程序 复习: 绘…...
【C语言】-程序编译的环境和预处理详解-让你轻松理解程序是怎么运行的!!
作者:小树苗渴望变成参天大树 作者宣言:认真写好每一篇博客 作者gitee:gitee 如 果 你 喜 欢 作 者 的 文 章 ,就 给 作 者 点 点 关 注 吧! 程序的编译前言一、 程序的翻译环境和执行环境二、 详解翻译环境2.1编译环境2.1.1预编…...
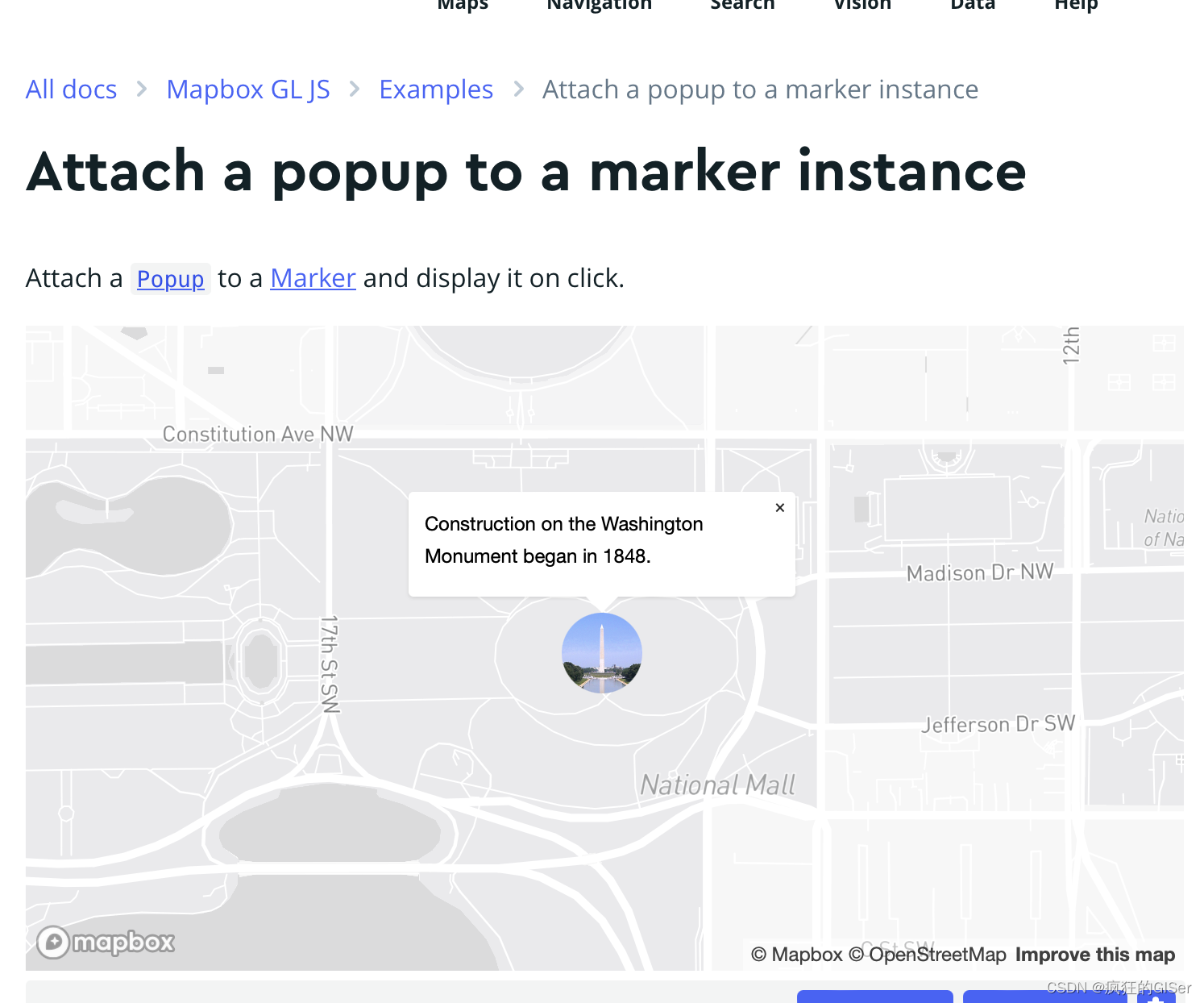
MapBox动态气泡图渲染教程
先来看效果: 视频效果: 屏幕录制2023-02-22 15.34.57 首先我们来介绍一下思路。对于mapbox和openlayers这样的框架来讲,气泡图中的气泡本质上就是一个div,就是将一个dom元素追加到canvas上的固定位置而已。 在mapbox中有marker的概念,官网也有示例: Attach a popup to …...

在 Ubuntu18.04 上编译安装 GMP
(2021.08.04)最近为了安装 IBM 的开源项目 HElib C,需要在服务器上先安装GMP和NTL,NTL需要依赖GMP,所以先来安装一下GMP,记录一下在服务器上安装成功的过程:) 直接安装libgmp二进制文…...

到底什么样的条件才能被浙大MBA录取?攻略集合
新一年管理类联考已悄然启动,很多考生把目标也都放在了浙江大学MBA项目上,那么浙江大学MBA项目好考吗?报考流程是怎样的?杭州达立易考教育在这里给大家汇总整理了浙大MBA项目相关资讯,分享给想要报考浙大MBA的同学&…...
Impacket工具使用
Impacket工具说明 Impacker是用户处理网络协议的Python类集合,用于对SAB1-3或IPv4/IPv6 上的TCP/UPD/ICMP/IGMP/ARP/IPv4/IPv6/SMB/MSRPC/NTLM/Kerberos/WMI/LDAP 等进行低级的编程访问,数据包可以从头开始构建,也可以从原始数据包中解析, 面向对象API使用处理协议的深层结构变…...
)
华为OD机试真题Python实现【RSA 加密算法】真题+解题思路+代码(20222023)
RSA 加密算法 题目 RSA 加密算法在网络安全世界中无处不在 它利用了极大整数因数分解的困难度,数据越大安全系数越高 给定了一个32位正整数,请对其进行因数分解 找出哪两个素数的乘积 🔥🔥🔥🔥🔥👉👉👉👉👉👉 华为OD机试(Python)真题目录汇总 ## 输…...
App.vue中读取不到路由的信息
问题: 首先定义了一个路由,并且在路由元里面存储了一个变量,在App.vue里面访问这个变量的时候却显示undefined!在路由对应的组件中却能访问到! 定义的路由元信息: 为啥访问不到…,懵逼的我在App.vue里…...

Lambda表达式详解
文章目录1、Lambda表达式简介2、如何使用Lambda表达式3、在哪里使用Lambda表达式3.1 函数式接口3.2函数描述符4、四大核心函数式接口4.1 Predicate4.2 Consumer4.3 Function4.4 Supplier5、方法引用5.1 方法引用的使用情况6、构造器引用7、数组引用8、复合Lambda表达式的有用方…...
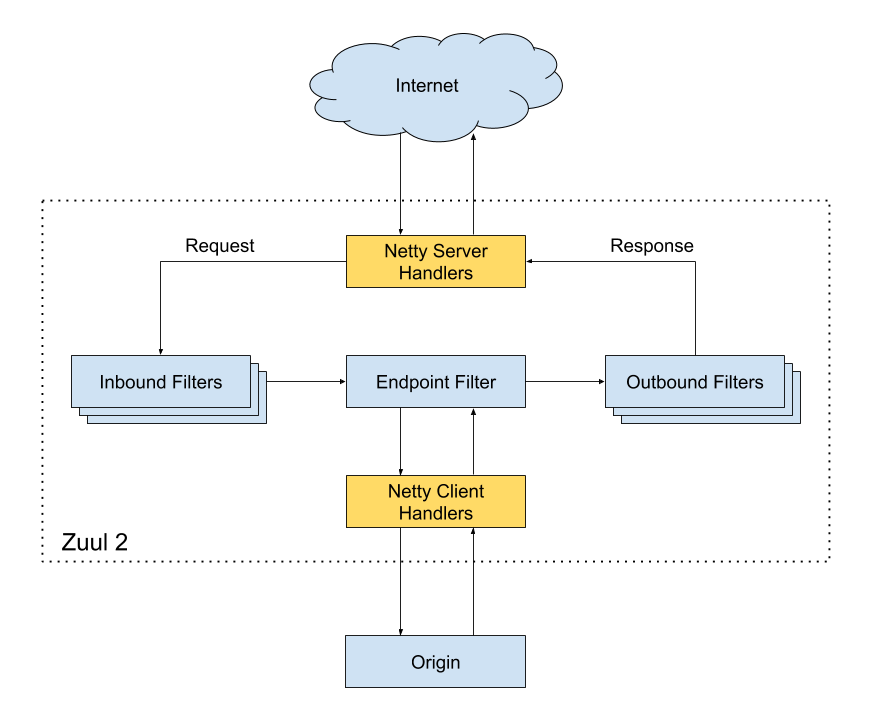
网关的通用设计框架
概念 网关,很多地方将网关比如成门, 没什么问题, 但是需要区分网关与网桥的区别。 网桥:工作在数据链路层,在不同或相同类型的LAN之间存储并转发数据帧,必要时进行链路层上的协议转换。可连接两个或多个网络…...
API 接口应该如何设计?如何保证安全?如何签名?如何防重?
说明:在实际的业务中,难免会跟第三方系统进行数据的交互与传递,那么如何保证数据在传输过程中的安全呢(防窃取)?除了https的协议之外,能不能加上通用的一套算法以及规范来保证传输的安全性呢&am…...

LeetCode-131. 分割回文串
目录题目思路回溯题目来源 131. 分割回文串 题目思路 切割问题类似组合问题。 例如对于字符串abcdef: 组合问题:选取一个a之后,在bcdef中再去选取第二个,选取b之后在cdef中再选取第三个…。切割问题:切割一个a之后&…...

澜起科技股东上海融迎拟减持:可套现超30亿 公司刚港股募资80亿港元
雷递网 乐天 5月23日澜起科技股份有限公司(证券代码:688008 证券简称:澜起科技)日前发布公告,宣布公司股东上海融迎企业管理合伙企业(有限合伙)拟转让 A 股股份总数为12,228,000 股,…...

文章三:Elasticsearch 集群恢复和索引分布
集群恢复网关与集群索引分布必要性了解在 Elasticsearch(简称 ES)集群运维中,集群重启恢复、残余索引处理、索引分片分布是保障集群稳定性、数据完整性、读写性能的三大核心基础能力。多数集群故障、数据丢失、分片异常、读写卡顿问题&#x…...

机器学习势函数与量子热浴结合:精准模拟钛酸钡相变中的核量子效应
1. 项目概述:当机器学习势函数遇上量子热浴在计算材料科学领域,我们一直面临着一个核心矛盾:精度与效率的权衡。研究像钛酸钡(BaTiO₃)这样的经典铁电材料相变,我们需要在原子尺度上追踪成千上万个原子在温…...

从‘交并比’到损失函数:一文搞懂Dice Loss在图像分割里的前世今生与代码实现
从集合相似度到像素级优化:Dice Loss在图像分割中的数学本质与工程实践当你在显微镜下观察一张病理切片时,那些蜿蜒交错的细胞边界决定了诊断结果;当自动驾驶汽车识别前方障碍物时,每个像素的分类关乎生命安全。图像分割作为计算机…...

2026保姆级免费在线去水印教程:想保存无水印视频?用这些方法就够了
你是不是也遇到过这样的尴尬:刷到一个特别喜欢的视频想保存下来做素材,结果画面中间杵着大大的水印;或者朋友发来一张好图,角落的Logo怎么都去不掉?自己研究半天,又是下软件又是找教程,结果要么…...
)
Veo视频生成引擎深度集成方案(官方未公开的Webhook级联协议与跨平台帧同步技术首次披露)
更多请点击: https://kaifayun.com 第一章:Veo与其他AI视频工具整合 Veo 作为 Google 推出的高保真视频生成模型,其核心价值不仅体现在单点生成能力上,更在于与现有 AI 视频工作流的深度协同。它不追求封闭生态,而是通…...

CentOS 7服务器上,从禁用Nouveau到成功点亮NVIDIA显卡的保姆级实录
CentOS 7服务器NVIDIA显卡驱动部署全指南:从Nouveau禁用到CUDA环境搭建当你第一次在CentOS 7服务器上部署NVIDIA显卡驱动时,那个看似简单的"禁用Nouveau"步骤往往会成为整个安装过程中最大的绊脚石。作为一位经历过无数次驱动安装的老手&#…...

用过才敢说!2026年最值得信赖的专业AI论文网站
2026年AI论文写作工具已从“内容生成”进化为“学术全流程智能助手”,核心差异体现在文献真实性、格式合规性、长文本逻辑、查重降重、AIGC合规五大维度。本次测评覆盖6款主流工具,涵盖中文/英文、全流程/专项、免费/付费场景,让你快速锁定最…...

BooruDatasetTagManager:如何用AI智能标注工具将图像数据集处理效率提升10倍
BooruDatasetTagManager:如何用AI智能标注工具将图像数据集处理效率提升10倍 【免费下载链接】BooruDatasetTagManager 项目地址: https://gitcode.com/gh_mirrors/bo/BooruDatasetTagManager 你是否曾经为AI模型训练准备数据集时,面对数千张需要…...
)
DeepSeek混合云架构下跨AZ流量调度困局:基于eBPF+Service Mesh的实时负载感知调度器设计(已上线支撑日均2.7亿QPS)
更多请点击: https://codechina.net 第一章:DeepSeek混合云架构下跨AZ流量调度困局的系统性认知 在DeepSeek混合云生产环境中,核心推理服务部署于多可用区(AZ)集群,底层横跨公有云(如AWS us-ea…...