修改ros中的控制器,便于仿真和驱动真实UR
UR机械臂学习(5-3):驱动ur机械臂实物——问题及解决_error: 鈥榰r_msgs::setpayloadrequest {aka struct ur__冰激凌啊的博客-程序员宝宝 - 程序员宝宝 (cxybb.com)
问题5 Action client not connected: scaled_pos_traj_controller/follow_joint_trajectory

[ WARN] [1624863539.203489625, 57.864000000]: Waiting for scaled_pos_joint_traj_controller/follow_joint_trajectory to come up
[ WARN] [1624863545.212986404, 63.864000000]: Waiting for scaled_pos_joint_traj_controller/follow_joint_trajectory to come up
[ERROR] [1624863551.221038108, 69.865000000]: Action client not connected: scaled_pos_joint_traj_controller/follow_joint_trajectory
解决:
这个是个很大的坑。
首先要确定的是在/home/guyue/ur_ws/src/fmauch_universal_robot/ur3_moveit_config/config下的ros_controllers.yaml里
name需要为scaled_pos_traj_controller,因为如果不是这个名字,是无法驱动实物机械臂的。
下面说原因:
看下面这张图,bringup启动的时候,他启动的是scaled_pos_traj_controller控制器

然后再回来说为什么启动gazebo,然后再启动moveit的时候会报这个错
看下面这张图

/home/guyue/ur_ws/src/fmauch_universal_robot/ur3_moveit_config/config下的ros_controllers.yaml
和/home/guyue/ur_ws/src/fmauch_universal_robot/ur_gazebo/config下的ur3_controllers.yaml
这两个文件夹对这个控制器的名字不一样
现在有两种思路
- 一种是把这两个文件里关于控制器的名称改为一样的
- 另一种是在某个文件里把这两个控制器连接在一起
先说第一种思路:
如果把moveit下面的ros_controllers.yaml里的scaled_pos_traj_controller改为pos_traj_controller
gazebo和所有仿真都正常,但在驱动实物时又会出现问题,因为ur_ros_driver驱动里面所有控制器的名字都是scaled_pos_traj_controller
而如果把gazebo下面的ur3_controllers.yaml里的pos_traj_controller改为scaled_pos_traj_controller
在启动gazebo时就会报错,因为/home/guyue/ur_ws/src/fmauch_universal_robot/ur_gazebo/launch文件夹下的ur3_bringup.launch也同样将这个控制器的名字命名为pos_traj_controller
如果说ur3_controllers.yaml和ur3_bringup.launch里的名字都修改,启动gazebo是不报错了,但启动moveit时还是会报最开始的那个错误。
所以,我们因当采取的是第二种思路:
也就是修改两者的连接文件
我们在moveit中启动的是ur3_moveit_planning_execution.launchl文件,所以从这个文件开始看起。
在这个里面就提到了如果sim参数为true,就连接两个控制器,但是这里面对于gazebo的名字为arm_controller,而不是现在所使用的pos_traj_controller,所以问题应该就出现在这里了。
所以,最后应该是修改/home/guyue/ur_ws/src/fmauch_universal_robot/ur3_moveit_config/launch下的ur3_moveit_planning_execution.launchl
修改后应该如下图所示

因为gazebo和moveit里的分别是
# moveit
controller_list:
- name: "scaled_pos_joint_traj_controller"action_ns: follow_joint_trajectorytype: FollowJointTrajectoryjoints:- shoulder_pan_joint- shoulder_lift_joint- elbow_joint- wrist_1_joint- wrist_2_joint- wrist_3_joint# gazebo
pos_joint_traj_controller:type: position_controllers/JointTrajectoryControllerjoints: &robot_joints- shoulder_pan_joint- shoulder_lift_joint- elbow_joint- wrist_1_joint- wrist_2_joint- wrist_3_joint
所以修改ur3_moveit_planning_execution.launchl为
<remap if="$(arg sim)" from="/scaled_pos_joint_traj_controller/follow_joint_trajectory" to="/pos_joint_traj_controller/follow_joint_trajectory"/>
最后,因为ur的安装包和驱动一直在更新,所以如果这种方法也没用了,可以注意下面几个文件里控制器的名称是否一致
-
gazebo里的文件
/home/guyue/ur_ws/src/fmauch_universal_robot/ur_gazebo/config文件夹下的ur3_controllers.yaml/home/guyue/ur_ws/src/fmauch_universal_robot/ur_gazebo/launch文件夹下的ur3_bringup.launch
-
moveit的文件
/home/guyue/ur_ws/src/fmauch_universal_robot/ur3_moveit_config/config文件夹下的ros_controllers.yaml/home/guyue/ur_ws/src/fmauch_universal_robot/ur3_moveit_config/launch文件夹下的ur3_moveit_planning_execution.launch
最后的最后,2021年6月下载的fmauch版,moveit的部分不需要修改,只需要修改gazebo部分
也就是说,只驱动真实机械臂,不仿真,是没有任何问题的,不需要任何修改
相关文章:
修改ros中的控制器,便于仿真和驱动真实UR
UR机械臂学习(5-3):驱动ur机械臂实物——问题及解决_error: 鈥榰r_msgs::setpayloadrequest {aka struct ur__冰激凌啊的博客-程序员宝宝 - 程序员宝宝 (cxybb.com) 问题5 Action client not connected: scaled_pos_traj_controller/follow_j…...
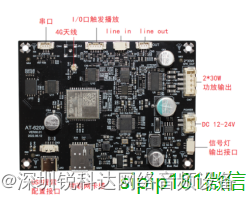
网络广播模块2*30W 智能4G广播终端开发模块
SV-704UG 4G网络广播模块2*30W 智能4G广播终端开发模块 一、描述 SV-704UG网络音频模块是一款带2*30W功放输出的4G广播音频模块,采用高性能ARM处理器及专业Codec,能接收4G广播音频数据流,转换成音频模拟信号输出。带有一路line in输入&#…...

优思学院|什么是精益项目管理?
正确地使用精益思想和技术是可以减少项目中的浪费、提高客户满意度,并提高项目的利润率。 在现实世界中,项目经理的工作充满了挑战。他们不仅需要专注于产品和团队,还必须确保客户的满意度。同时,他们还必须与矩阵组织打交道&…...
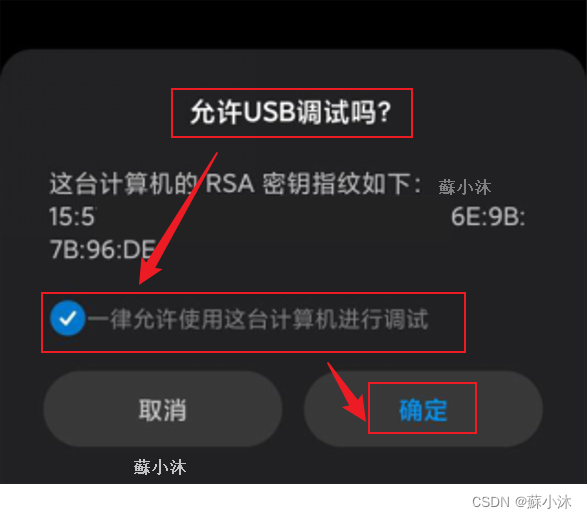
【Android取证篇】华为设备跳出“允许USB调试“界面方法的不同方法
【Android取证篇】华为设备跳出"允许USB调试"界面方法的不同方法 华为设备在鸿蒙OS3系统之后,部分设备启用"允许USB调试"方式会有所变化,再次做个记录—【蘇小沐】 1.实验环境 系统版本Windows 11 专业工作站版22H2(2…...
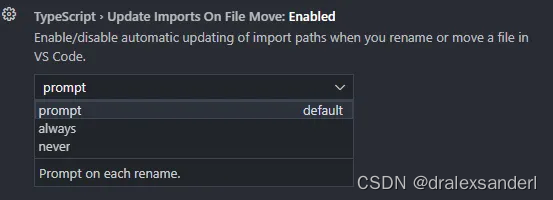
在VSCode中移除不必要的扩展
在VSCode中移除不必要的扩展 在VSCode中安装扩展是编辑器缓慢且耗电的主要原因之一,因为添加的每个新扩展都会增加应用程序的内存和 CPU 使用率。 VSCode现在已经具备了非常多的功能,我们可以将一些重复工作的扩展移除掉。卸载这些现在可有可无的扩展将…...
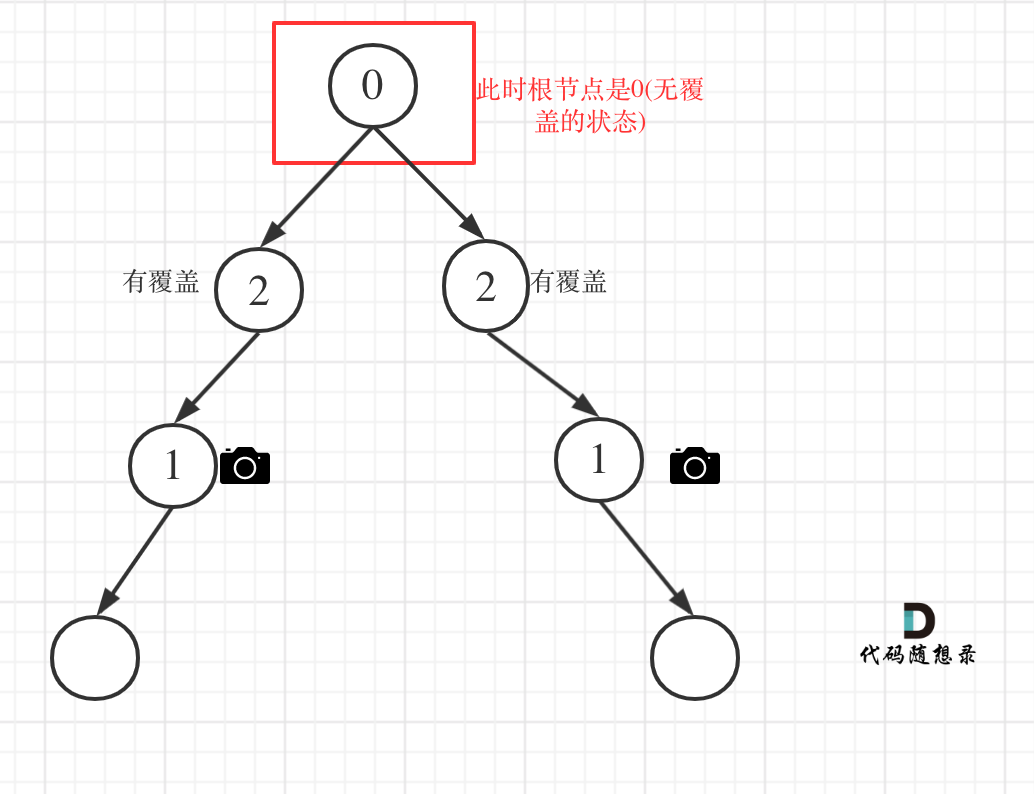
算法刷题记录-树(LeetCode)
783. Minimum Distance Between BST Nodes 思路(DFS 中序遍历) 考虑中序遍历的性质即可 代码 class Solution { public:int min_diffnumeric_limits<int>::max();int prevnumeric_limits<int>::min()100000;int minDiffInBST(TreeNode* root) {inorderTraversa…...

Linux中安装MySQL_图解_2023新
1.卸载 为了避免不必要的错误发生,先将原有的文件包进行查询并卸载 // 查询 rpm -qa | grep mysql rpm -qa | grep mari// 卸载 rpm -e 文件名 --nodeps2.将安装包上传到指定文件夹中 这里采用的是Xftp 3.将安装包进行解压 tar -zxvf 文件名 -C 解压路径4.获取解压的全路…...

生产设备上的静电该如何处理?
在工厂生产车间里有很多机械设备,在生产运作过程中,难免会产生大量静电,静电会产生许多危害。 例如,1、会使电子设备故障、误操作而引起的电磁干扰。 2、电子元件或集成电路的静电击穿; 3、高压静电放电引起触电; 4、静电放电引起…...

山洪灾害预警方案(山洪预警解决方案的组成)
随着气候变化的不断加剧,山洪灾害在许多地区成为了极具威胁性的自然灾害之一。为了帮助地方政府和居民更好地预防和应对山洪灾害,我们设计了一套基于星创易联的SR600工业路由器和DTU200的山洪灾害预警方案,并成功在某地区进行了部署。 案…...

数据库 MVCC 详解
目录 1. 什么是 MVCC? 2. MVCC 的好处? 3. 快照读?当前读分别是什么?怎么理解? 3.1 快照读 3.2 当前读 4. 数据库的四种隔离级别 5. MVCC 实现原理 5.1 隐藏字段 5.2 undo log(版本链) 5.3 readView 6. re…...

process.nextTick和vue的nextTick区别
事情的起因是代码里用了nextTick,然后提交代码的时候才发现,引入的是process的,然后改成了使用vue的nextTick发现效果不生效了,然后百度查了查两者的区别: process.nextTick是nodejs自带的,而在浏览器中执…...
小程序实现一个 倒计时组件
小程序实现一个 倒计时组件 需求背景 要做一个倒计时,可能是天级别,也可能是日级别,时级别,而且每个有效订单都要用,就做成组件了 效果图 需求分析 需要一个未来的时间戳,或者在服务度直接下发一个未来…...

【四万字】网络编程接口 Socket API 解读大全
Socket 是网络协议栈暴露给编程人员的 API,相比复杂的计算机网络协议,API 对关键操作和配置数据进行了抽象,简化了程序编程。 本文讲述的 socket 内容源自 Linux man。本文主要对各 API 进行详细介绍,从而更好的理解 socket 编程。…...

无涯教程-JavaScript - ISREF函数
描述 如果指定的值是参考,则ISREF函数返回逻辑值TRUE。否则返回FALSE。 语法 ISREF (value) 争论 Argument描述Required/OptionalvalueA reference to a cell.Required Notes 您可以在执行任何操作之前使用此功能测试单元格的内容。 适用性 Excel 2007,Excel 2010,Exce…...

Android:获取MAC < 安卓系统11 <= 获取UUID
1.核心代码 主要的UseMac.java import android.annotation.SuppressLint; import android.content.Context; import android.net.ConnectivityManager; import android.net.NetworkInfo; import android.net.wifi.WifiInfo; import android.net.wifi.WifiManager; import an…...

线程的几种状态
目标: 1. 线程的几种状态的含义 2. 状态之间的切换条件 目录 新建(new)线程 可运行(Runnable)状态 运行(Running)状态 阻塞(Blocked)状态 等待(Waiting…...

kubernetes集群yaml文件与kubectl工具
k8s集群中对资源管理和资源对象编排部署都可以通过声明样式(yaml)文件来解决,也就是可以把需要对资源对象操作编辑到yaml格式文件中,我们把文件叫做资源清单文件,通过kubectl命令直接使用资源清单文件就可以实现对大量的资源对象进行编排部署…...
)
python基础语法(三)
感谢各位大佬对我的支持,如果我的文章对你有用,欢迎点击以下链接 🐒🐒🐒个人主页 🥸🥸🥸C语言 🐿️🐿️🐿️C语言例题 🐣🐓🏀python 运…...
Haproxy集群与常见的Web集群调度器
文章目录 1. Web集群调度器概述1.1 Web集群调度器简介1.2 调度器类别1.2.1 常用软件类1.2.2 常用硬件类 2. Haproxy软件介绍2.1 Haproxy简介2.2 支持功能2.3 主要特性2.4 常用调度算法2.4.1 轮询:RR(Round Robin)2.4.2 最小连接数:…...

centos免密登录
centos免密登录 小白教程,一看就会,一做就成。 1.知道服务器密码的情况 ssh-keygen -t rsa #上面的命令后三次回车#然后把想要免密登录的服务器加进来 ssh-copy-id -i /root/.ssh/id_rsa.pub root192.168.10.115 #免密码登录被控的主机(ip是…...

斗鱼股权曝光:腾讯持股40% 陈少杰持股18%
雷递网 乐天 5月13日斗鱼日前向美国SEC发布20-F文件,文件显示,截至2026年3月31日,腾讯一共持有 12,070,080股,占总股本的40%;斗鱼创始人、联席CEO陈少杰持股为18%。截至2026年3月31日,斗鱼股权结构Morgan S…...

完全掌握Trainers‘ Legend G:深度解析赛马娘中文本地化插件的5大核心功能
完全掌握Trainers Legend G:深度解析赛马娘中文本地化插件的5大核心功能 【免费下载链接】Trainers-Legend-G 赛马娘本地化插件「Trainers Legend G」 项目地址: https://gitcode.com/gh_mirrors/tr/Trainers-Legend-G Trainers Legend G是一款专为赛马娘Pre…...

3个场景解锁小爱音箱音乐自由:开源神器XiaoMusic的终极指南
3个场景解锁小爱音箱音乐自由:开源神器XiaoMusic的终极指南 【免费下载链接】xiaomusic 使用小爱音箱播放音乐,音乐使用 yt-dlp 下载。 项目地址: https://gitcode.com/GitHub_Trending/xia/xiaomusic 还在为小爱音箱的音乐播放限制而烦恼吗&…...

耳机选购指南:从音质佩戴到无线降噪,构建你的场景化耳机衣橱
1. 耳机选购的底层逻辑:从“听个响”到“场景化生存”我家里有个抽屉,专门用来放耳机,数了数,不下十几副。从最早那副压箱底的Koss头戴式,到如今几乎长在耳朵上的AirPods Pro,每一副都对应着我生活里一个特…...
ANLI计算结果才准确)
避开这3个坑,你的夜间灯光数据(NPP/VIIRS)ANLI计算结果才准确
避开这3个坑,你的夜间灯光数据(NPP/VIIRS)ANLI计算结果才准确 深夜的城市灯光如同流动的星河,而NPP/VIIRS卫星捕捉的这些光点正成为区域经济研究的"新货币"。但当我第一次用ArcGIS计算昆明各区县的平均灯光指数&#x…...

ESXi 7.0升级后Windows Server 2022启动报错?解决安全引导与驱动兼容性实战
ESXi 7.0升级后Windows Server 2022启动报错的深度解决方案 当你在一台运行ESXi 7.0的ThinkSystem服务器上部署了Windows Server 2022虚拟机,突然某天系统更新后虚拟机无法启动,屏幕上赫然显示"找不到磁盘"的错误信息——这种场景对于任何中级…...

WinRAR分卷压缩 vs 7-Zip分卷压缩:哪个更适合你?一次讲清区别、选型和实操
WinRAR分卷压缩 vs 7-Zip分卷压缩:深度对比与场景化选型指南 在数字文件传输与存储的日常场景中,大文件处理始终是个绕不开的痛点。无论是设计师需要发送PSD源文件给客户,还是开发人员要共享虚拟机镜像,当文件体积突破邮箱附件限…...
)
从桌面玩具到生产力工具:Dobot Magician机械臂的5个超实用项目实战(含代码)
从桌面玩具到生产力工具:Dobot Magician机械臂的5个超实用项目实战(含代码) 在创客圈里积灰的Dobot Magician机械臂,可能正等待一次真正的觉醒。这款被许多人当作"高级玩具"的六轴机械臂,实际上隐藏着足以改…...

从AD9288到STM32H750:手把手拆解开源示波器osc_fun的硬件架构与选型思路
从AD9288到STM32H750:开源示波器osc_fun的硬件架构深度解析与工程实践 在开源硬件领域,osc_fun示波器项目以其精巧的架构设计和出色的性价比,成为众多硬件开发者研究的热点。这个看似简单的示波器背后,隐藏着一系列精妙的硬件选型…...

免费豆包大模型API代理部署指南:原理、实战与安全实践
1. 项目概述:一个免费且强大的大模型API代理 最近在折腾大语言模型应用开发的朋友,估计都绕不开一个核心痛点:API调用成本。无论是OpenAI的GPT系列,还是国内外的其他主流模型,按Token计费的模式在频繁调试和原型验证阶…...