【视觉SLAM入门】8. 回环检测,词袋模型,字典,感知,召回,机器学习
"见人细过 掩匿盖覆”
- 1. 意义
- 2. 做法
- 2.1 词袋模型和字典
- 2.1.2 感知偏差和感知变异
- 2.1.2 词袋
- 2.1.3 字典
- 2.2 匹配(相似度)计算
- 3. 提升
前言: 前端提取数据,后端优化数据,但误差会累计,需要回环检测构建全局一致的地图;
1. 意义
- 通俗的讲,机器人两次经过同一个场景,为了检测是同一个场景,这就是回环检测。它可以用来构建全局一致的地图。有了时隔更加久远的约束,一定程度消除累计飘移。形象的想弹簧,就是把原来已经优化好的,拉的更贴近真实位置。
- 回环检测还可以做重定位,在跟踪丢失的时候。
2. 做法
以下是几种做法:
- 取当前图像和历史所有图像一一进行特征提取并比对,通过匹配的数量确定。O( n 2 n^2 n2),缺点资源;
- 还是上边的方法,但不一一匹配,随机抽取,可检测到的帧少很多;
- 里程计配合给一个大致位置,这里的进行回环检测,缺点里程计自带误差,只能小范围;
- 基于外观,主流,其中一种就是词袋模型。
2.1 词袋模型和字典
2.1.2 感知偏差和感知变异
感知偏差(假阳性),感知变异(假阴性)

-
准确率(检测正确的数量 / 检测的总数量): P r e c i s i o n = T P / ( T P + F P ) Precision = TP/(TP+FP) Precision=TP/(TP+FP)
-
召回率(实际检测出来的数量 / 理应检测出来的数量): R e c a l l = T P / ( T P + F N ) Recall = TP/(TP+FN) Recall=TP/(TP+FN)
一般这两个数据呈矛盾,不取极端,只说在recall为多少,pre为多少时候效果最好,一般我们对P的要求更高。这是回环检测的严格性导致的。
2.1.2 词袋
- 字典实际就是对所有图片中的特征进行提取,比如"人","车"等,它们是单词,对全部图像特征提取所有单词(特征)后构成一个字典。
- 词袋说的是一帧图像中,能够提取出来的单词。
比如现在有一本4个特征的字典: D = [ x 1 , x 2 , x 3 , x 4 ] D = [x_1,x_2,x_3,x_4] D=[x1,x2,x3,x4]
而我们有两个 x 1 x_1 x1 一个 x 3 x_3 x3 特征的图像,那用词袋可以记为:
A = 2 ⋅ x 1 + 0 ⋅ x 2 + 1 ⋅ x 3 + 0 ⋅ x 4 A = 2\cdot x_1 + 0\cdot x_2 + 1\cdot x_3 + 0\cdot x_4 A=2⋅x1+0⋅x2+1⋅x3+0⋅x4
它的向量就是
A = [ 2 , 1 , 0 , 0 ] A = [2,1,0,0] A=[2,1,0,0]
那么检测两个图像,则举例可以用
s ( a , b ) = 1 − 1 W ∣ ∣ a − b ∣ ∣ 1 s(a,b) = 1 - \frac{1}{W}||a-b||_1 s(a,b)=1−W1∣∣a−b∣∣1
L1范数,各元素绝对值之和,向量完全一样则得到1,是回环。
2.1.3 字典
字典里的单词是某一类特征的组合,类似于一个聚类问题,UML(无监督学习常见问题)。
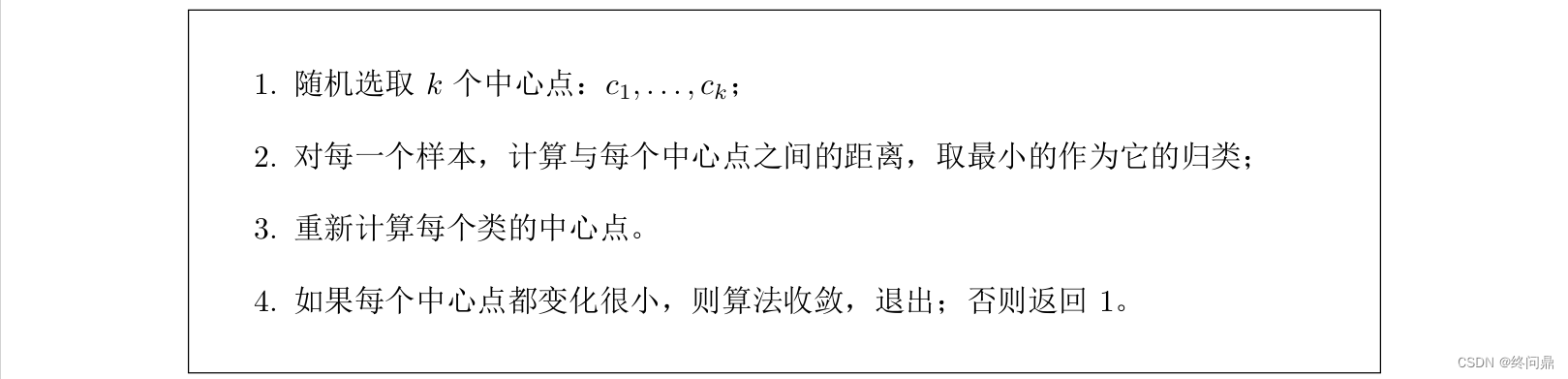
- 假设要做 k k k 个单词的字典,可以用K-means,K-means++等实现,这里以K-means(均值)为例:
字典规模大,要在字典中查找单词属于哪个,逐个查找复杂度 O ( n ) O(n) O(n),参考数据结构,这里有很多优化方法,这里以最简单的K叉树为例去优化字典结构:
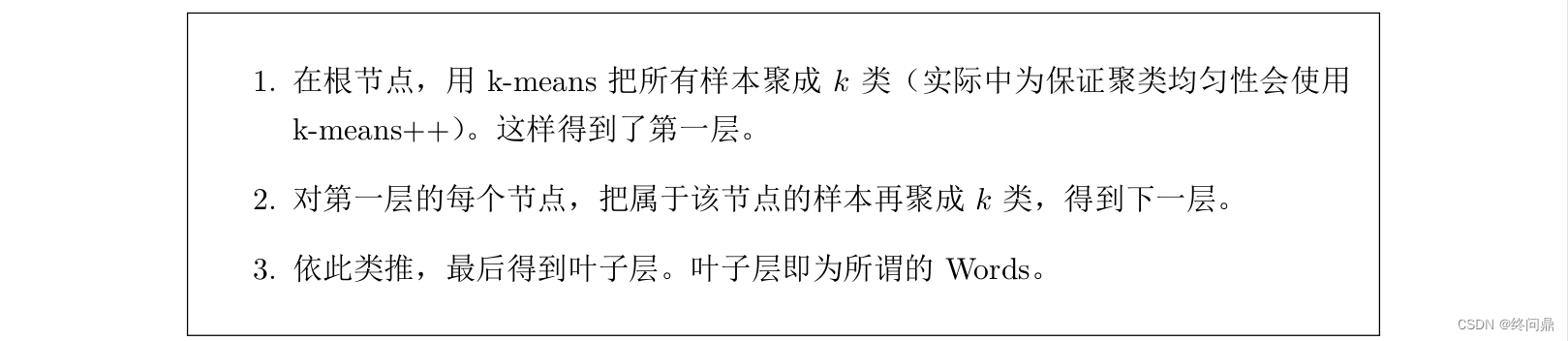
又很像K-D树,聚类类中类,聚中聚哈哈。一棵深度为 d d d , 分支为 k k k 的树,可以容纳, k d k^d kd 单词。
2.2 匹配(相似度)计算
两个概念:
- TF(Term Frequency)译频率: 某单词在一副图像中经常出现,它的区分度就高;
- IDF(Inverse Document Frequency)逆文档频率: 某单词在字典中出现的频率低,它的区分度就高;
-
在做字典时候,用IDF,假设所有特征总数为 n n n, 当前要统计的单词特征 w i w_i wi 的数量为 n i n_i ni, 则此单词的IDF为:
I D F i = l o g n n i IDF_i = log \frac{n}{n_i} IDFi=lognin -
对一副图像而言,假设特征/单词 w i w_i wi 出现了 n i n_i ni 次,而这幅图一共出现的单词数量为 n n n,则TF为:
T F i = n i n TF_i = \frac{n_i}{n} TFi=nni -
基于以上知识,一个图像的特征点可以对应到很多单词,则它的词袋(BOW)为:
A = ( w 1 , η 1 ) , ( w 2 , η 2 ) , . . . , ( w N , η N ) ⟺ v A A = {(w_1, \eta _1), (w_2, \eta _2), ... , (w_N, \eta _N)} \iff v_A A=(w1,η1),(w2,η2),...,(wN,ηN)⟺vA
词袋中有很多0值,因为它不能包含字典中所有词。 -
计算两图词袋的差异(匹配度),给出一种方式(一范数),还有很多:
s ( v A − v B ) = 2 ∑ i = 1 N ∣ v A i ∣ + ∣ v B i ∣ − ∣ v A i − v B i ∣ s(v_A - v_B) = 2\sum^N_{i=1}|v_{Ai}| +|v_{Bi}|-|v_{Ai}-v_{Bi}| s(vA−vB)=2i=1∑N∣vAi∣+∣vBi∣−∣vAi−vBi∣
3. 提升
对于回环检测,有几点可以提升的部分:
- 增加字典规模
- 相似性评分处理
对于环境外观相似,比如教室同款椅子很多,利用先验的相似度(某时刻关键帧图像与上一时刻关键帧的相似性)进行归一化:
s ( v t , v t j ) ′ = s ( v t , v t j ) / s ( v t , v t − Δ t ) s(v_t,v_{tj})' = s(v_t,v_{tj})/s(v_t,v_{t-\Delta t}) s(vt,vtj)′=s(vt,vtj)/s(vt,vt−Δt)
- 关键帧处理
- 相邻帧肯定满足回环检测条件,因为变化太小,所以回环检测的帧一般稀疏;
- 检测到的回环相邻帧意义不大,一帧就可以优化轨迹,因此会把相近的回环聚类成一类,使算法不会反复检测同一类。
- 验证
词袋没有顺序,相机颠倒也是回环,如何验证?
回环缓存机制是一种,单词检测到的回环不足以构成约束,在一段时间内一直检测到的回环才是正确的回环(时间上的一致性检测)
- 机器学习应用于类别
图像连续变化产生不同类别,甚至可以认为是连续的;
图像间相似性可以利用深度学习方法;
词袋方法的物体识别能力不如神经网络,回环检测类似。
相关文章:
【视觉SLAM入门】8. 回环检测,词袋模型,字典,感知,召回,机器学习
"见人细过 掩匿盖覆” 1. 意义2. 做法2.1 词袋模型和字典2.1.2 感知偏差和感知变异2.1.2 词袋2.1.3 字典 2.2 匹配(相似度)计算 3. 提升 前言: 前端提取数据,后端优化数据,但误差会累计,需要回环检测构建全局一致的地图&…...
SpringBean的生命周期
SpringBean的生命周期 SperingBean的生命周期是从Bean实例化之后,即通过反射创建出对象之后,到Bean成为一个完整对象,最终存储到单例池中,这个过程被称为Spring Bean的生命周期。Spring Bean的生命周期大体上分为三个阶段 Bean的…...

uni-app 之 picker选择器
uni-app 之 picker选择器 同步滚动:开 uni-app 之 picker选择器 一、普通选择器 二、多列选择器 三、时间选择器 四、日期选择器 一、普通选择器 <template><view><picker change"bindPickerChange" :value"index" :range&q…...

整合车辆出险报告Api接口,轻松管理车险理赔!
随着车辆保有量的不断增加,车辆出险的情况也越来越普遍。对于车主来说,如何高效地管理车险理赔,处理保险事故是非常重要的。这时候我们就可以借助整合车辆出险报告API接口,实现快速定位理赔信息,轻松管理车险理赔。 一…...
eNSP基础网络学习-v02
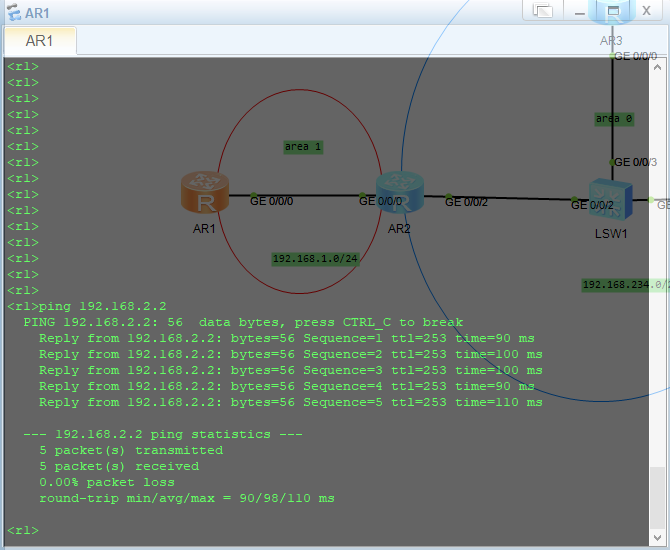
一、eNSP 1.什么是eNSP eNSP(Enterprise Network Simulation Platform)是一款由华为提供的免费的、可扩展的、图形化操作的网络仿真工具平台,主要对企业网络路由器、交换机进行软件仿真,完美呈现真实设备实景,支持大型网络模拟,让…...
)
mac环境安装多个node版本(可切换)
出现问题 mac m1pro版(前段时间刚换的),环境安装的都是最新的。node 18.17.1 前端跑的是react 18 的项目(antD), 又跑了一个相对环境配置比较低的项目,然后启动不起来了; 分析控制台报错,推断是…...
Linux 操作技巧
目录 一、shell-命令解释器 二、Linux中的特殊符号 三、命令历史--history 一、shell-命令解释器 shell——壳,命令解释器,负责解析用户输入的命令 ——内置命令(shell内置) ——外置命令,在文件系统的某个目录下&…...

一个电子信息工程学生的历程和内心感想
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 一、我对大学三年专业课程的理解二、我为什么本科选择研究嵌入式这个方向?1.可以把理论变为实际应用——兴趣是最好的老师。2.嵌入式方向可以打的比赛非…...

【zookeeper】zk集群安装与启动踩坑点
zk安装我也踩了一些坑。特别是第一点,zk官网好像都没什么说明,导致直接下错了,搞了好几个小时。 踩坑点如下: 1,在zk官网下载包时,注意3.5以后的版本,要下载带-bin的,3.5之后&…...
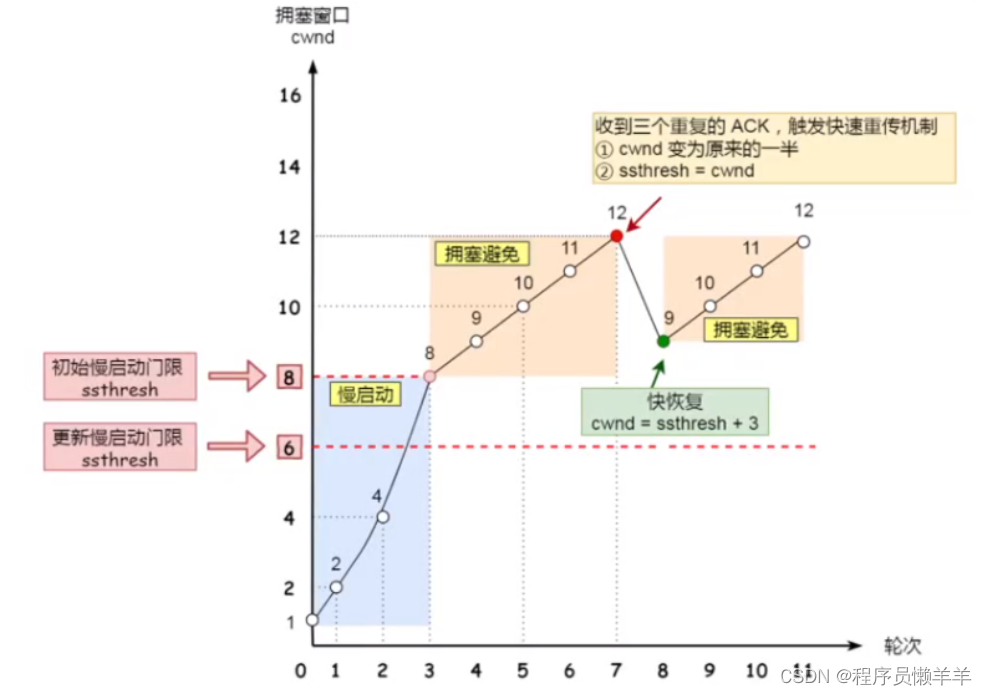
【计算机网络】 拥塞控制
文章目录 背景TCP的四种拥塞控制算法慢开始与拥塞避免:快重传:快恢复: 流量控制和拥塞控制本质上的 区别 背景 网络中的链路容量和交换节点中的缓存和处理机都有着工作的极限,当网络的需求超过他们的工作极限时,就出现…...

【react】慎用useLayoutEffect转而使用useEffect
由于useLayoutEffect钩子是在dom获得后、渲染组件前。因此,如果在useLayoutEffect中设置一些长耗时的,或者死循环之类的任务,会导致内存堆栈溢出。这时候需要转用useEffect。 // 适配全局宽度拉动变化时,legend显示数量React.use…...
基于微信小程序的美食推荐系统设计与实现(源码+lw+部署文档+讲解等)
前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师、全栈领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java、小程序技术领域和毕业项目实战✌💗 👇🏻…...
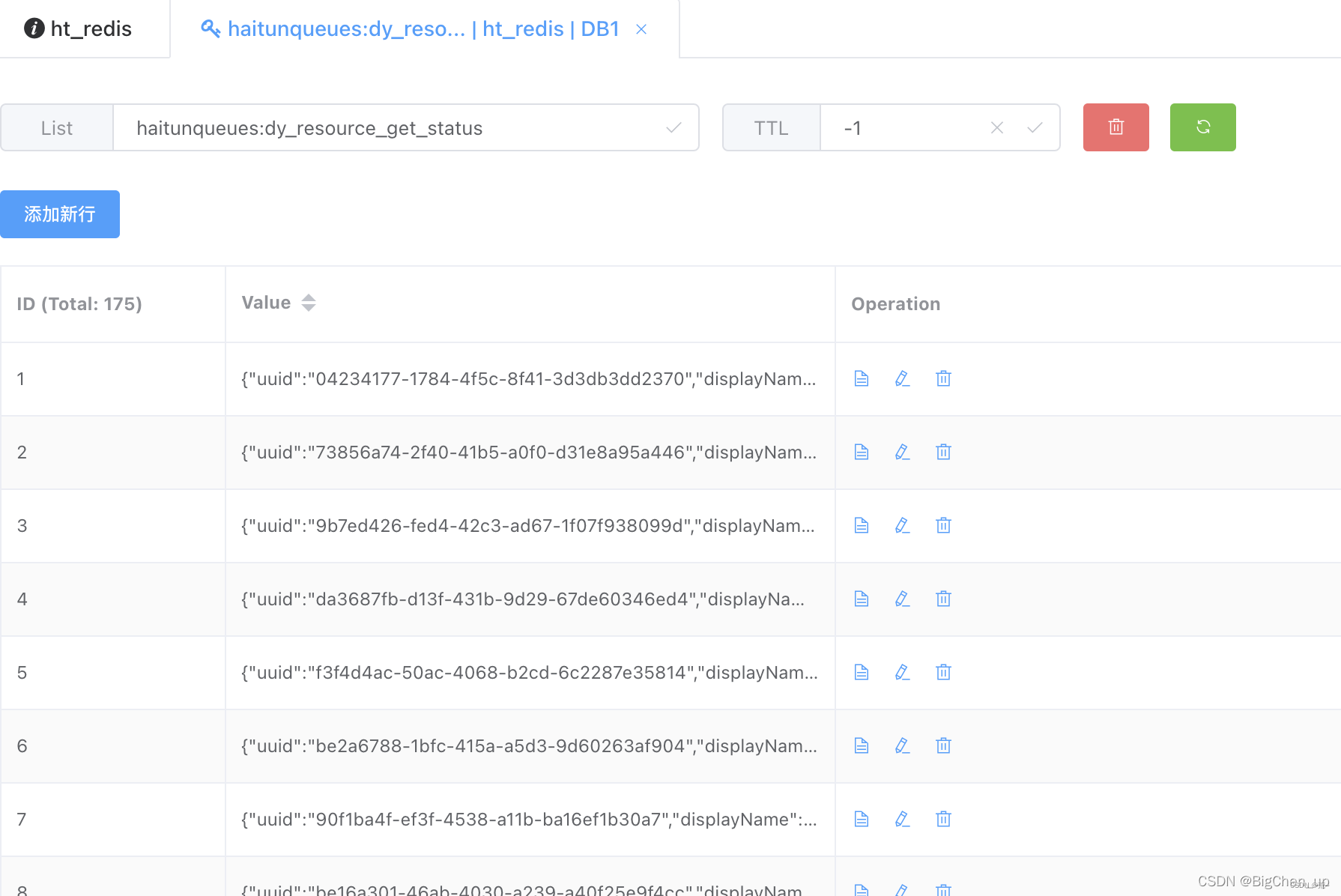
laravel框架 - 消息队列如何使用
业务场景:项目里边有很多视频资源需要上传到抖音资源库,通过队列一条一条上传。 参考实例:发送邮件,仅供参考 (1)创建任务【生成任务类】 在你的应用程序中,队列的任务类都默认放在 app/Jobs 目录下。如果这个目录不存…...
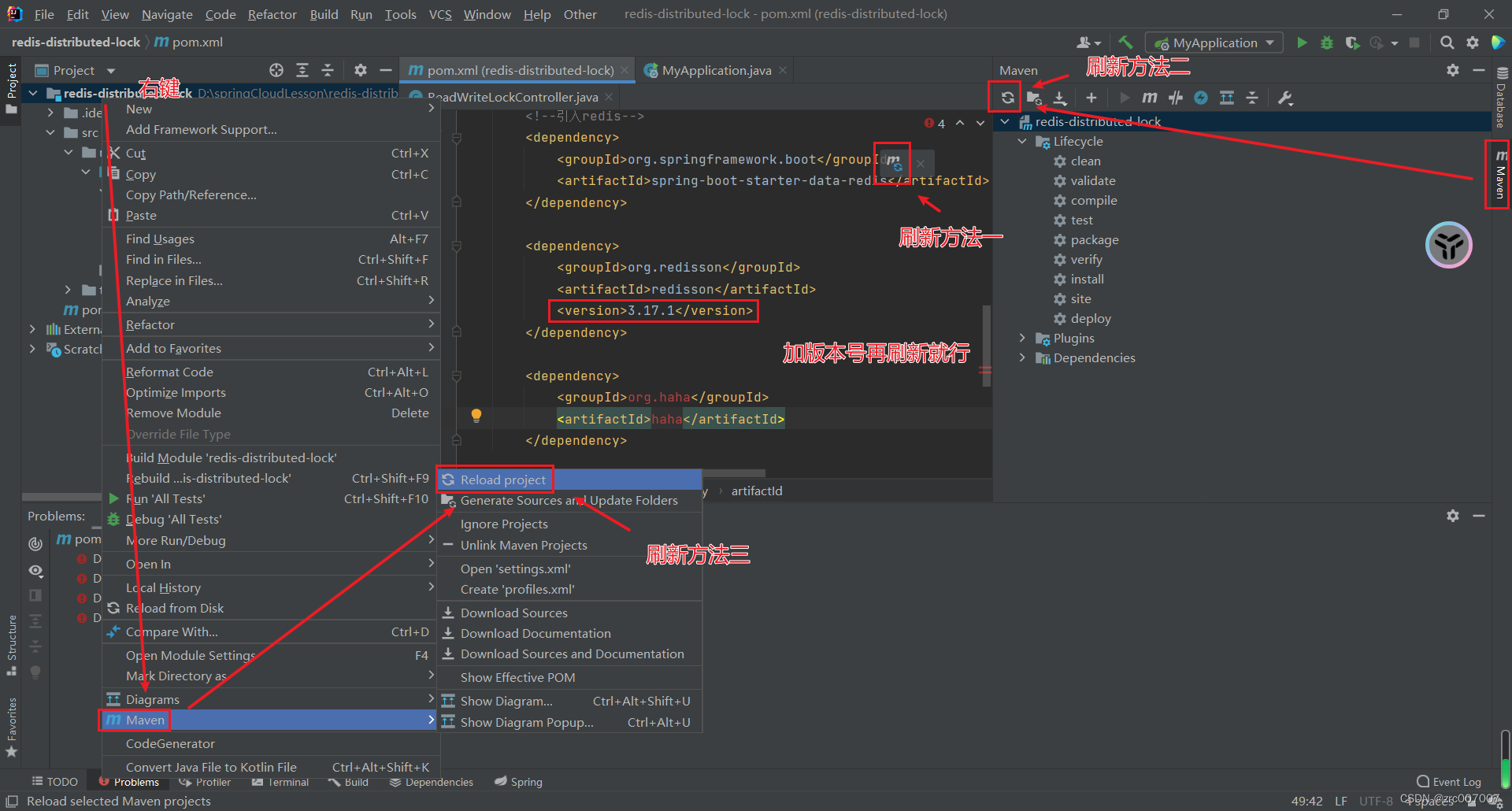
Dependency ‘org.redisson:redisson:‘ not found解决方法 三种刷新Maven项目的方法
报错情况 在pom中导入redisson包 <dependency><groupId>org.redisson</groupId><artifactId>redisson</artifactId> </dependency> 爆红,还显示Dependency org.redisson:redisson: not found。 由于报错已经解决,…...
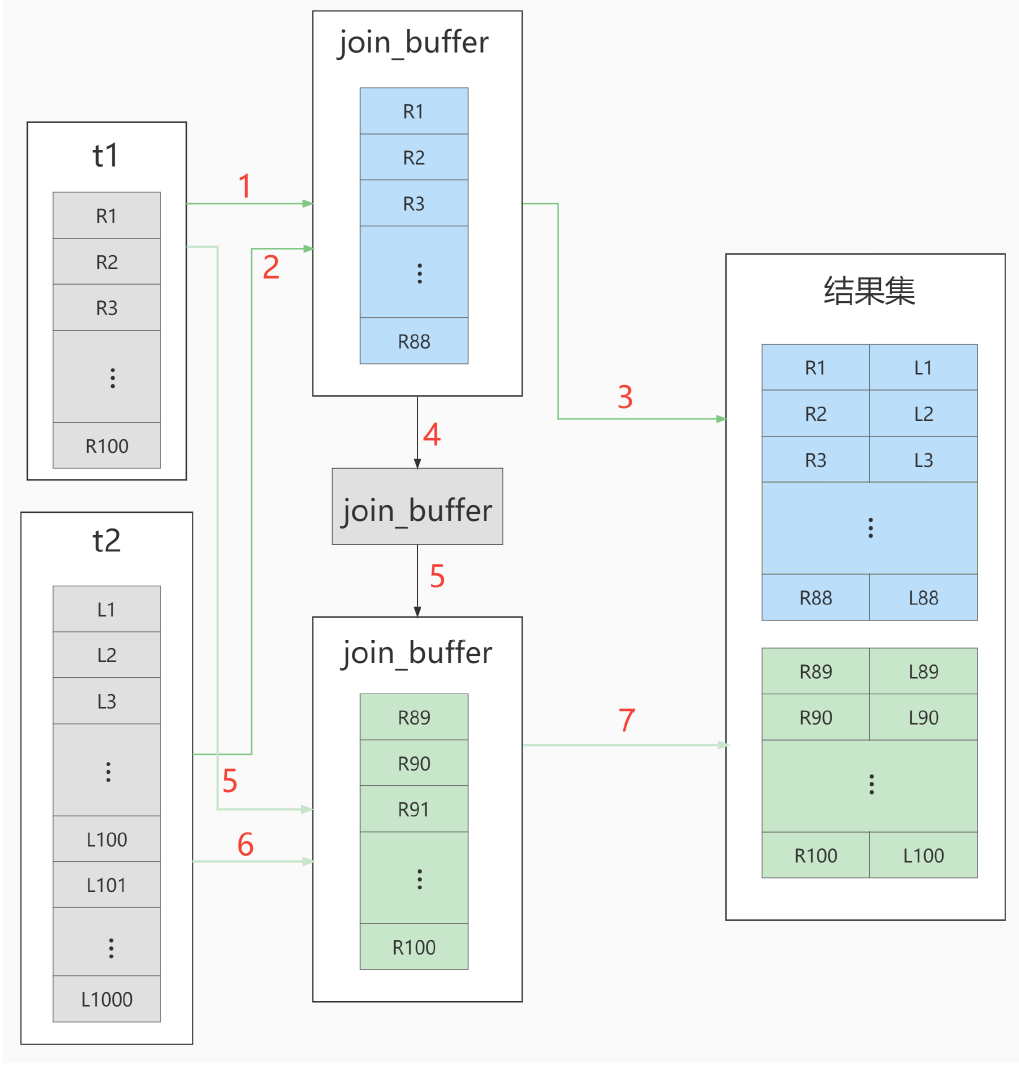
Mysql高级——索引优化和查询优化(1)
索引优化 1. 数据准备 学员表插50万条, 班级表插1万条。 建表 CREATE TABLE class (id INT ( 11 ) NOT NULL AUTO_INCREMENT,className VARCHAR ( 30 ) DEFAULT NULL,address VARCHAR ( 40 ) DEFAULT NULL,monitor INT NULL,PRIMARY KEY ( id ) ) ENGINE INNO…...
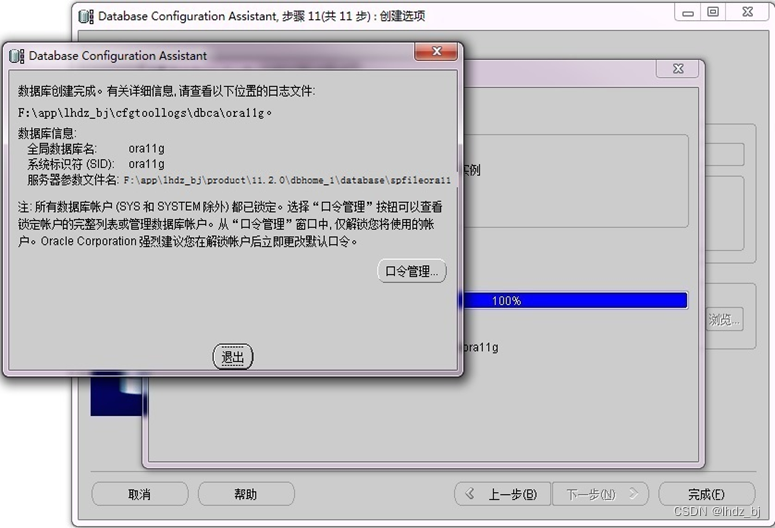
Oracle for Windows安装和配置——Oracle for Windows数据库创建及测试
2.2. Oracle for Windows数据库创建及测试 2.2.1. 创建数据库 1)启动数据库创建助手(DBCA) 进入%ORACLE_HOME%\bin\目录并找到“dbca”批处理程序,双击该程序。具体如图2.1.3-1所示。 图2.1.3-1 双击“%ORACLE_HOME%\bin\dbca”…...

【1993. 树上的操作】
来源:力扣(LeetCode) 描述: 给你一棵 n 个节点的树,编号从 0 到 n - 1 ,以父节点数组 parent 的形式给出,其中 parent[i] 是第 i 个节点的父节点。树的根节点为 0 号节点,所以 par…...

LeetCode【1. 两数之和】
穷通有命无须卜,富贵何时乃济贫;角逐名场今已久,依然一幅旧儒巾。 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输…...
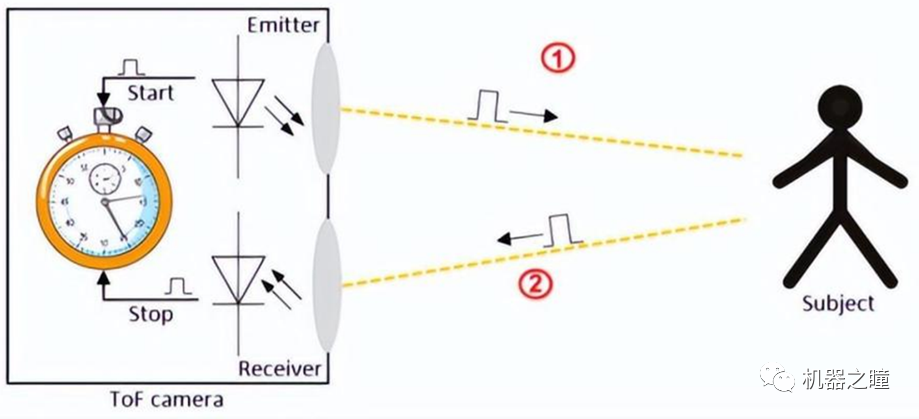
3D成像技术概述
工业4.0时代,三维机器视觉备受关注,目前,三维机器视觉成像方法主要分为光学成像法和非光学成像法,这之中,光学成像法是市场主流。 飞行时间3D成像 飞行时间成像(Time of Flight),简称TOF,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉…...
Centos7 安装部署 Kubernetes(k8s) 高可用集群
1:基础环境准备 宿主机系统集群角色服务器IP主机名称容器centos7.6master192.168.2.150ks-m1dockercentos7.6master192.168.2.151ks-n1dockercentos7.6master192.168.2.152ks-n2docker 1.1 服务器初始化及网络配置 VMware安装Centos7并初始化网络使外部可以访问*…...

国际空间站工程知识共享:从太空协作到地面工程实践的启示
1. 国际空间站:一个工程师眼中的知识共享金矿作为一名在航天工程领域摸爬滚打了十几年的工程师,我常常被问到一个问题:耗资巨大的国际空间站(ISS),除了那些遥不可及的太空探索梦想,到底给我们这…...

从DataOperation接口到QuickSort实现:探究适配器模式在算法整合中的应用
1. 适配器模式:解决接口不兼容的桥梁 想象一下你从国外带回来一个三脚插头的电器,但家里的插座都是两孔的。这时候你会怎么做?大多数人会选择买一个转换插头。在编程世界里,适配器模式就是这个万能的"转换插头"。 最近我…...

终极指南:如何使用qmcdump轻松解密QQ音乐加密音频文件
终极指南:如何使用qmcdump轻松解密QQ音乐加密音频文件 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否…...

Prometheus 自定义指标监控:Python Exporter 编写与业务指标告警配置
前言 Prometheus 监控系统指标(CPU、内存、磁盘)这件事很多人熟悉,但不少开发者有个共同疑问:业务特有的指标——比如队列积压数、订单待处理量、API 调用成功率——Prometheus 能监控吗? 答案是:完全可以…...

AC鸭的迷宫按钮
题目描述AC鸭来到一个迷宫里,迷宫有 n 行 m 列。迷宫中有五种字符:A 表示 AC鸭一开始的位置。B 表示出口的位置。. 表示可以经过的空地。# 表示一开始不能经过的墙。K 表示按钮。AC鸭每一步可以向上、下、左、右四个方向移动一格,不能走出迷宫…...

通过AxisApi中转站使用国外API大模型教程
前言:所有的国外大模型想不通过中转站直接使用,其实是很麻烦的的事情,就拿codex来说,需要一个谷歌账号,没有谷歌账号需要注册,注册还必须要使用国外的手机号码和验证码校验审核,流程很繁琐&…...

从‘能用’到‘好用’:给你的Vue+Element后台管理系统布局加点儿‘细节’
从‘能用’到‘好用’:VueElement后台管理系统的细节打磨指南 后台管理系统作为企业级应用的核心枢纽,其用户体验直接影响着运营效率和操作愉悦度。许多开发者在完成基础功能搭建后,常常陷入"能用但不好用"的困境——系统虽然跑得通…...

从 `raster` 到 `terra`:R语言中的栅格数据处理
在R语言中,处理空间数据的包非常多,其中 raster 包曾经是处理栅格数据的首选。然而,随着时间的推移,terra 包逐渐成为了更高效、功能更全面的替代品。今天我们来探讨一下如何从 raster 迁移到 terra,并通过一个实例来展示其使用方法。 为什么选择 terra? terra 包由 ra…...

工程师视角:从生物钟原理到实战,系统化解决跨时区时差问题
1. 时差反应的本质与挑战:为什么我们会被“时差”困扰?作为一名常年需要跨时区协作的硬件工程师,我对“时差”这个词有着切肤之痛。无论是为了一个紧急的客户会议飞往硅谷,还是参加一年一度的慕尼黑电子展,跨越多个时区…...

PUBG玩家必看:如何用罗技鼠标宏实现精准无后座力射击
PUBG玩家必看:如何用罗技鼠标宏实现精准无后座力射击 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 你是否在《绝地求生》中总感觉压…...