多旋翼无人机组合导航系统-多源信息融合算法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
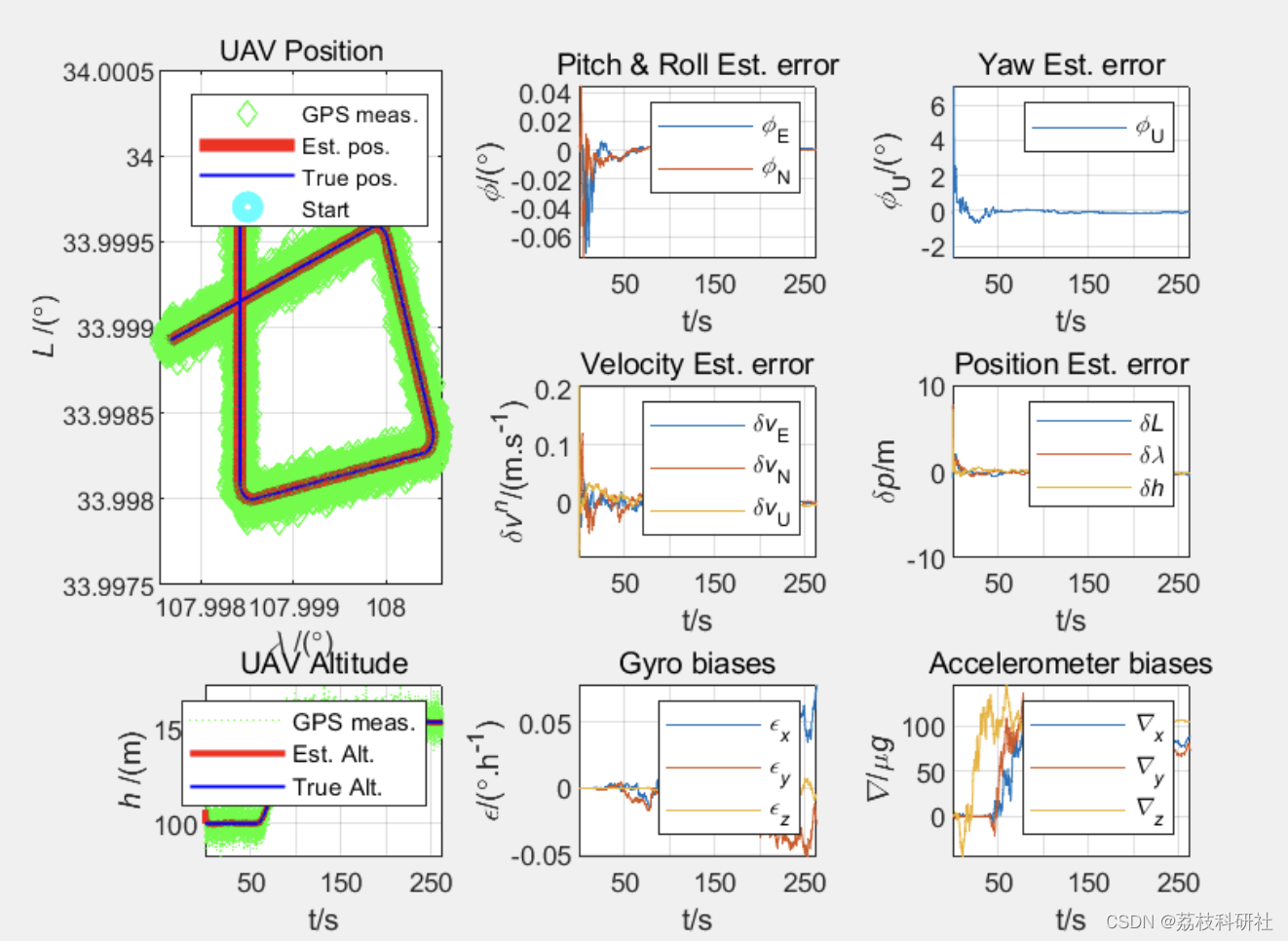
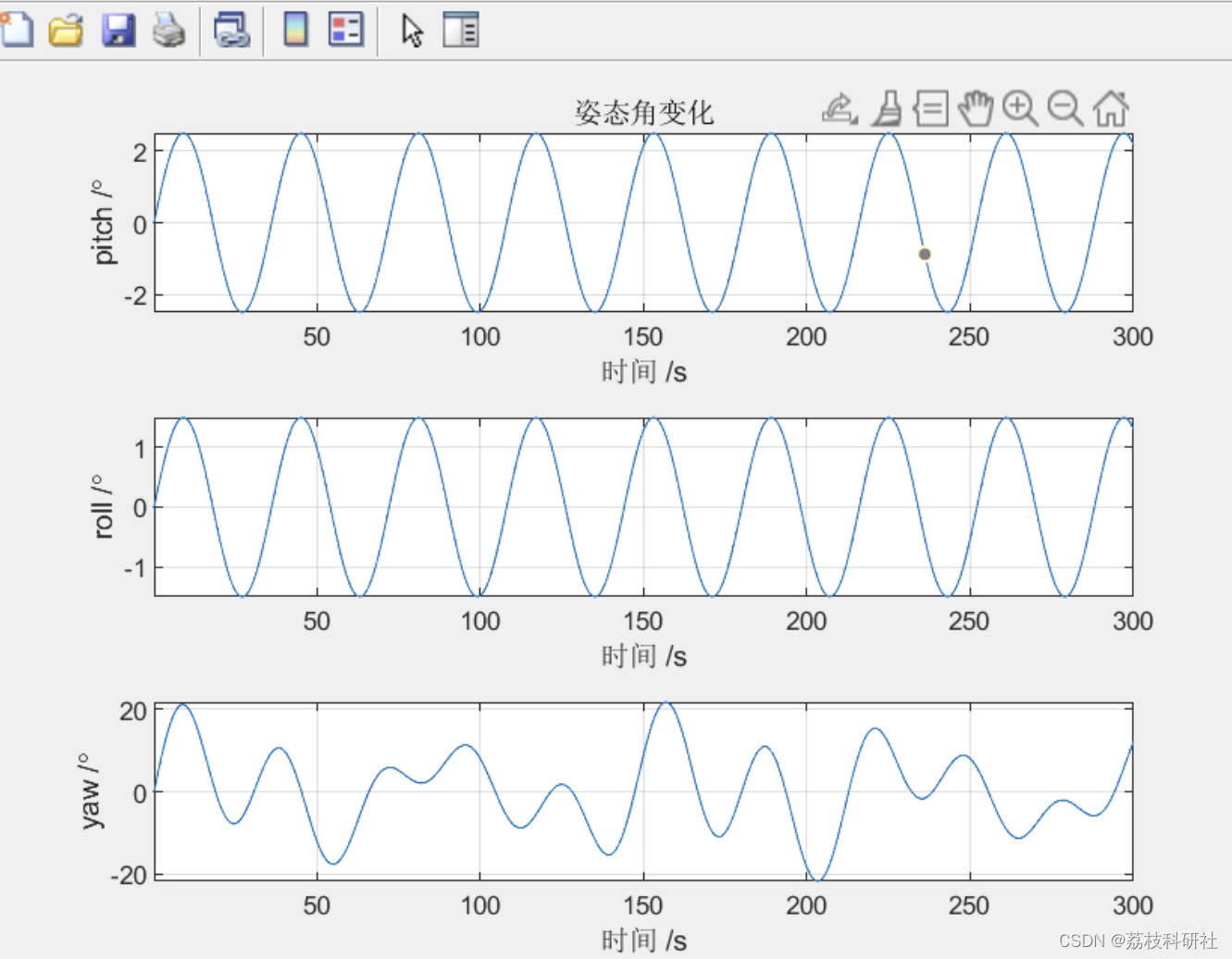
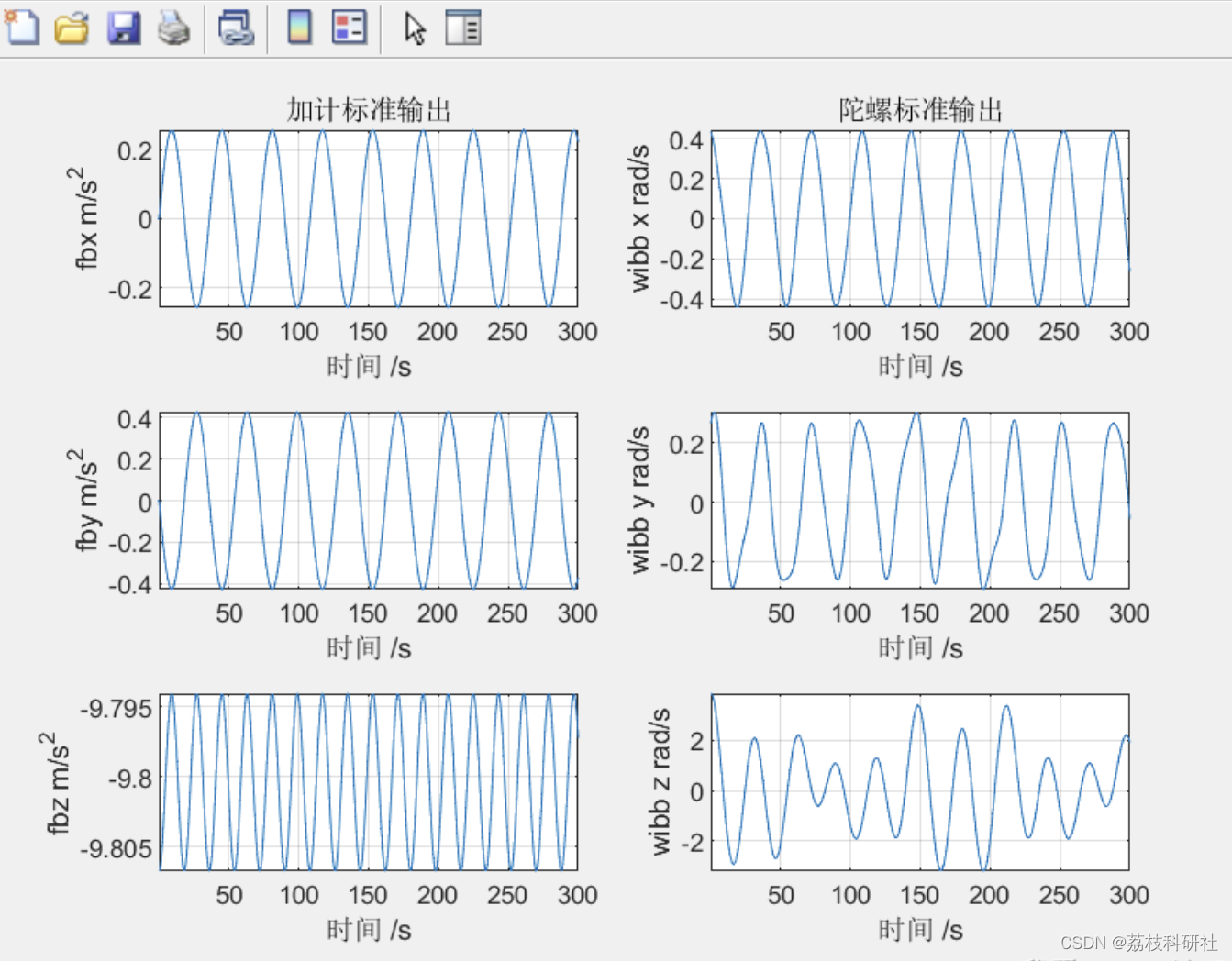
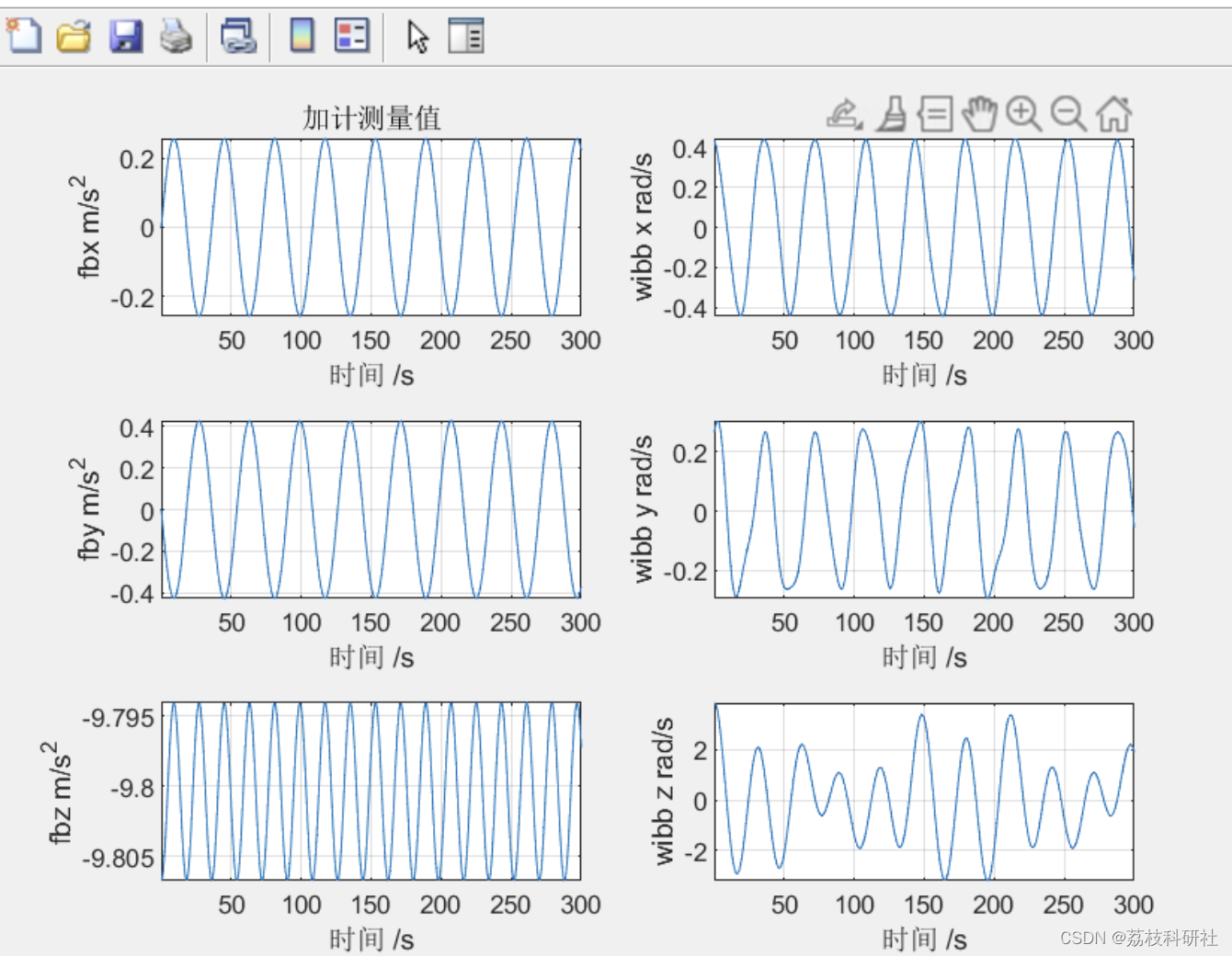
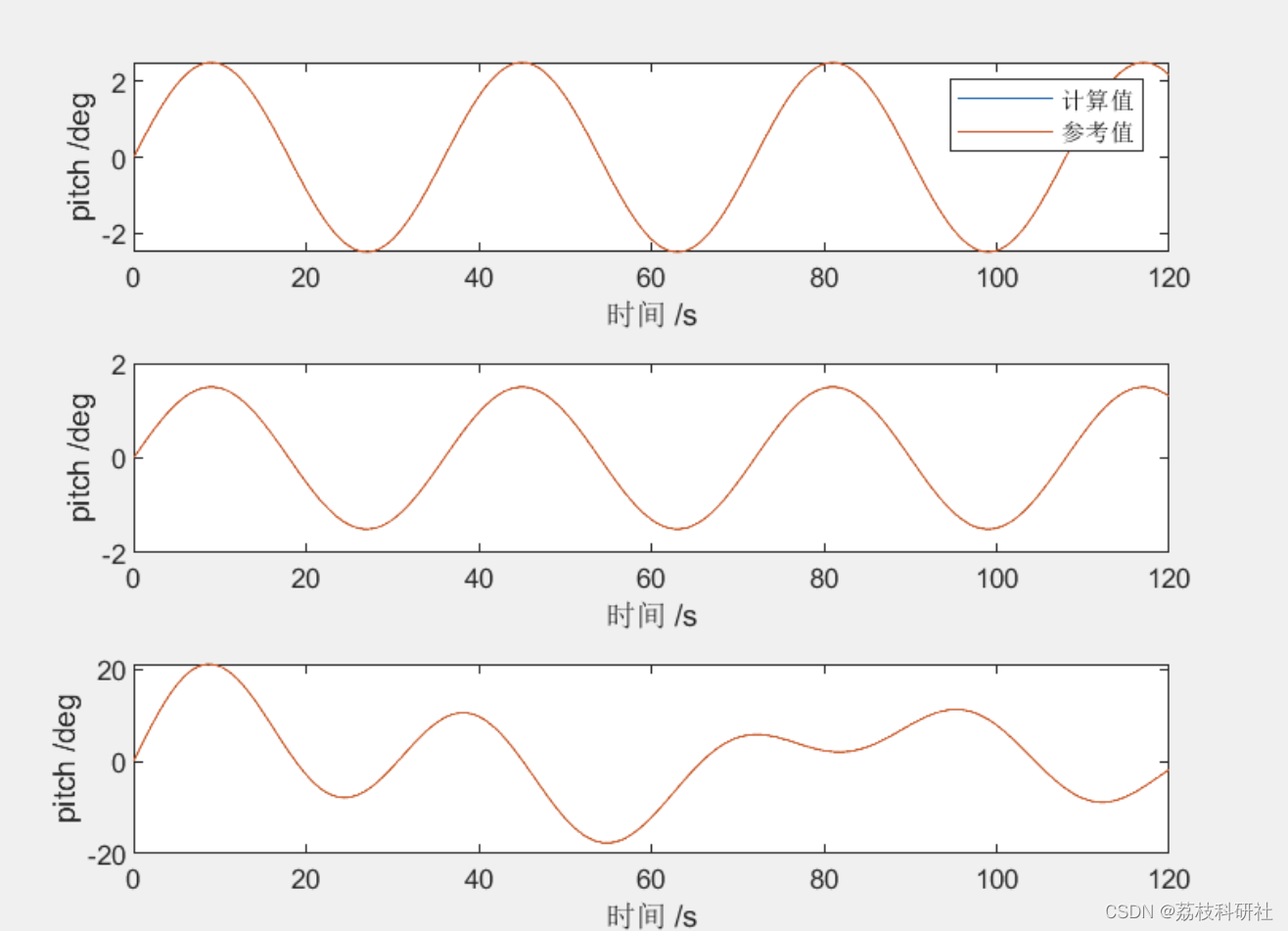
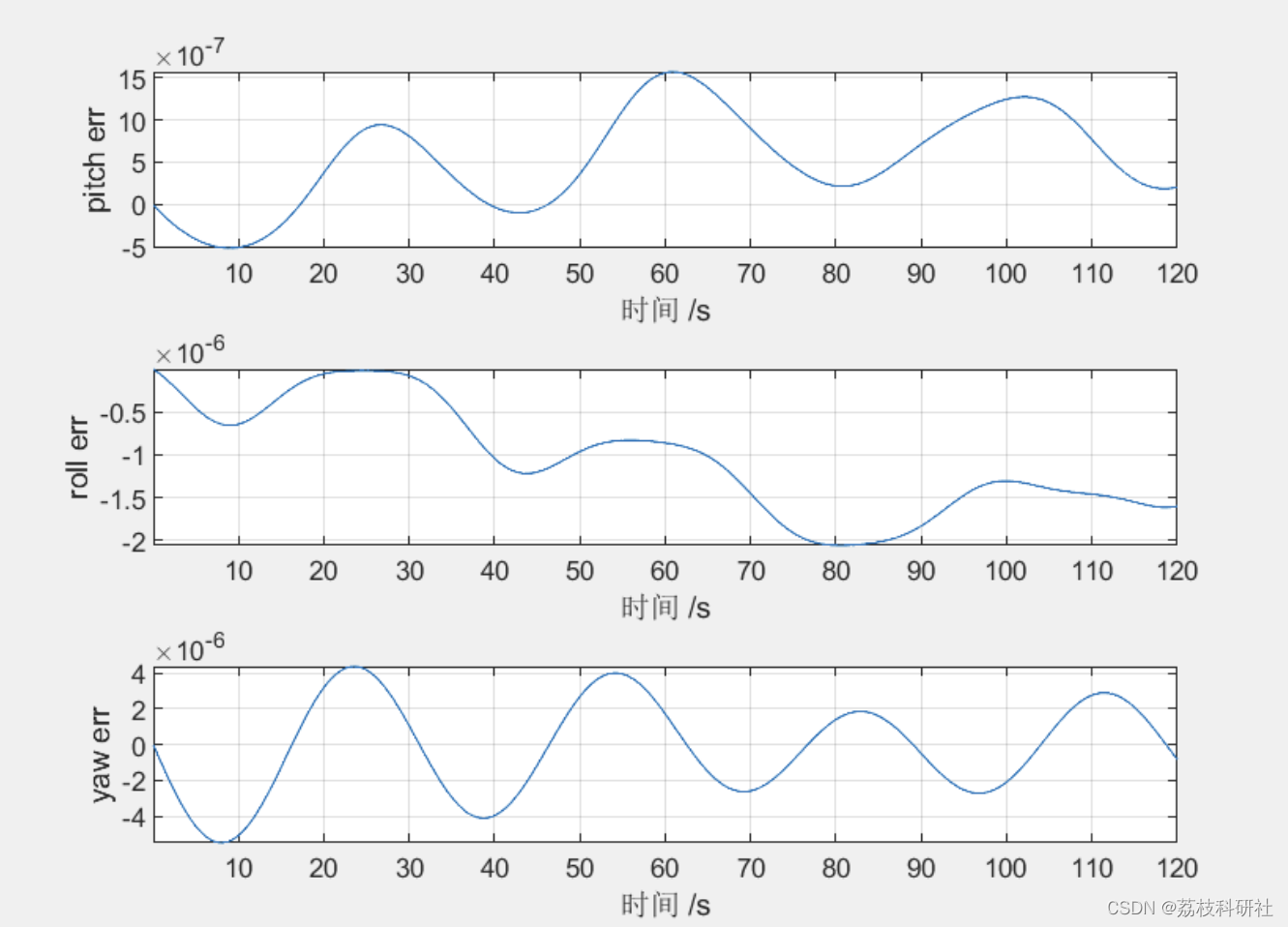
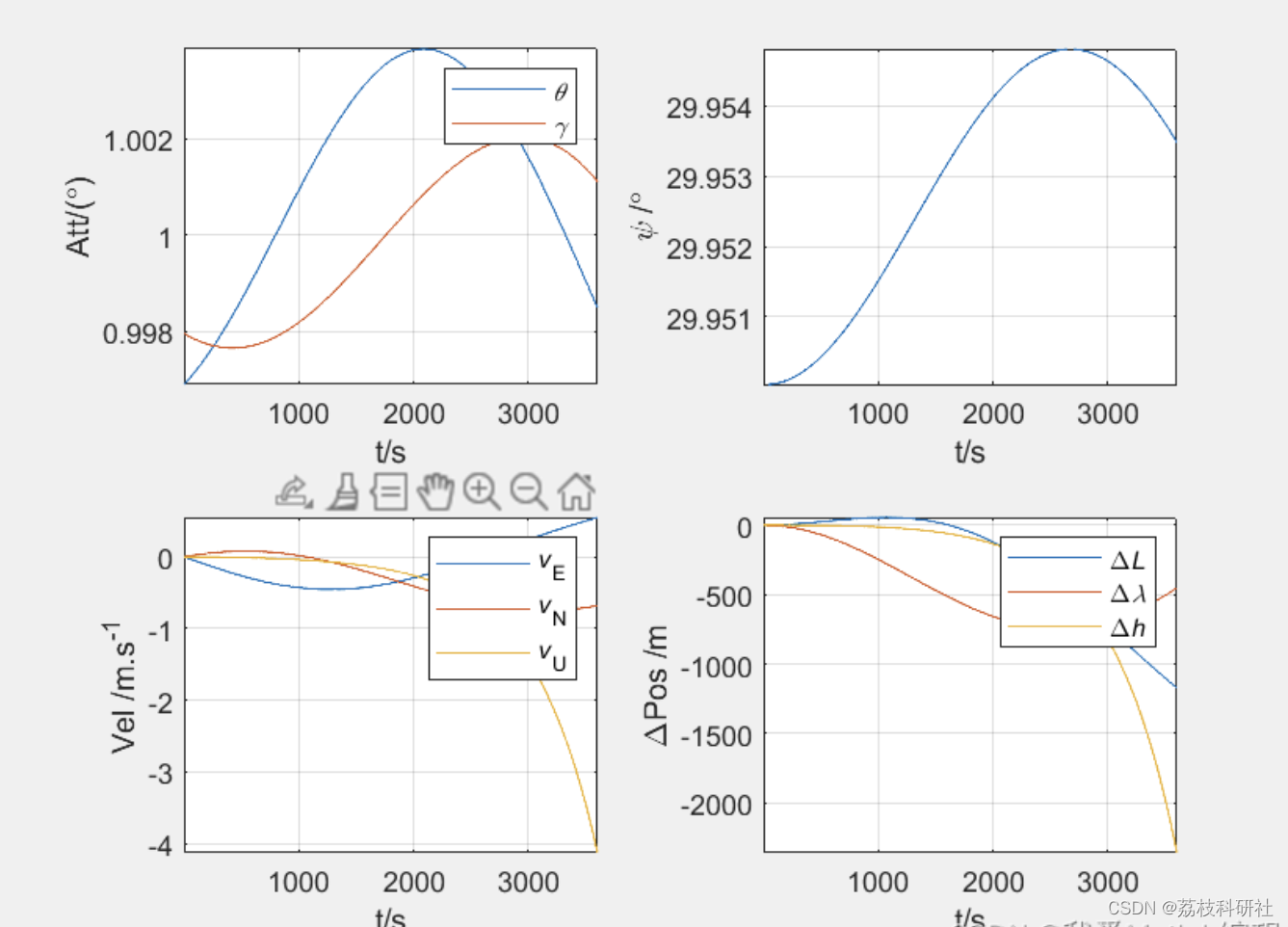
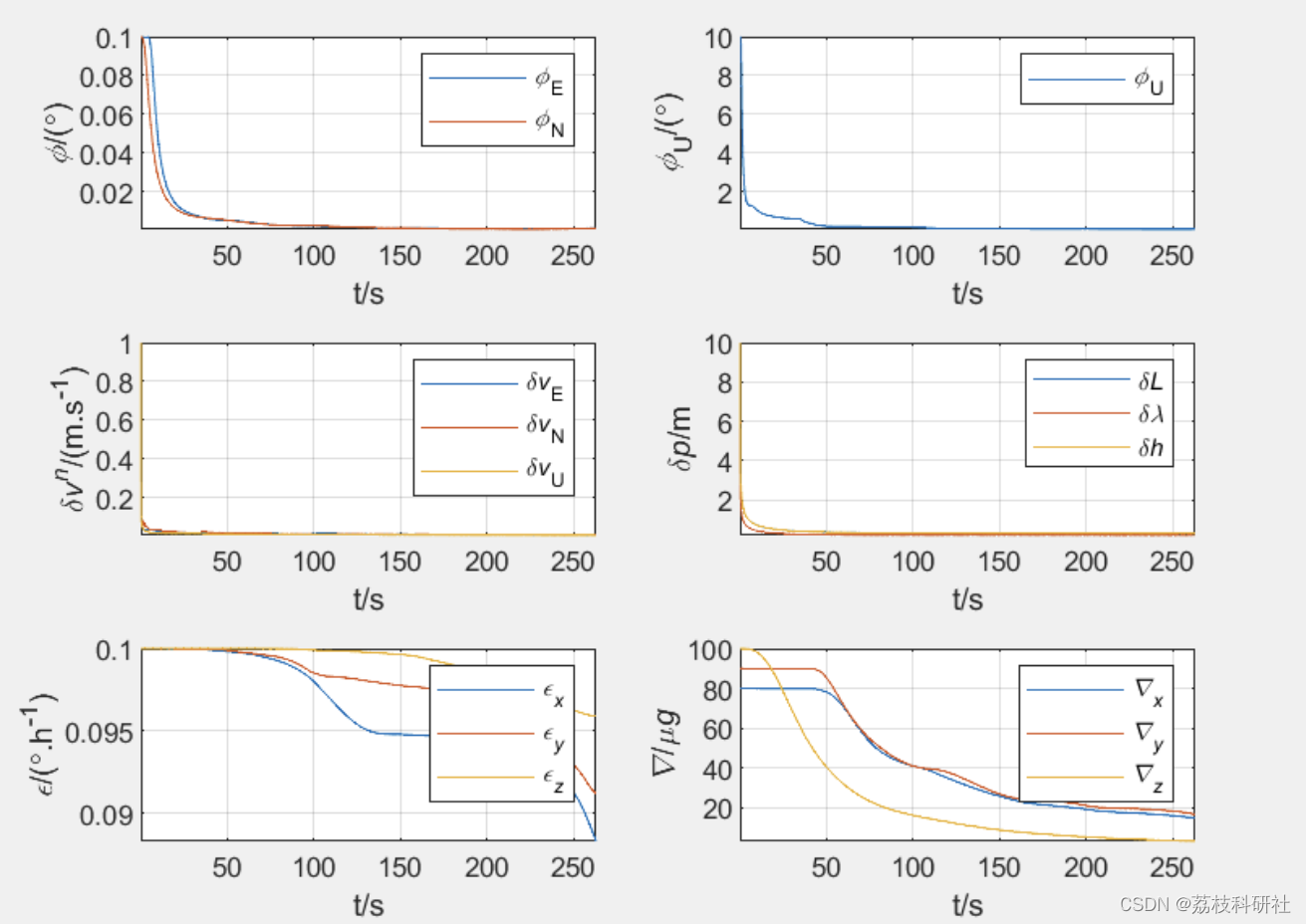
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
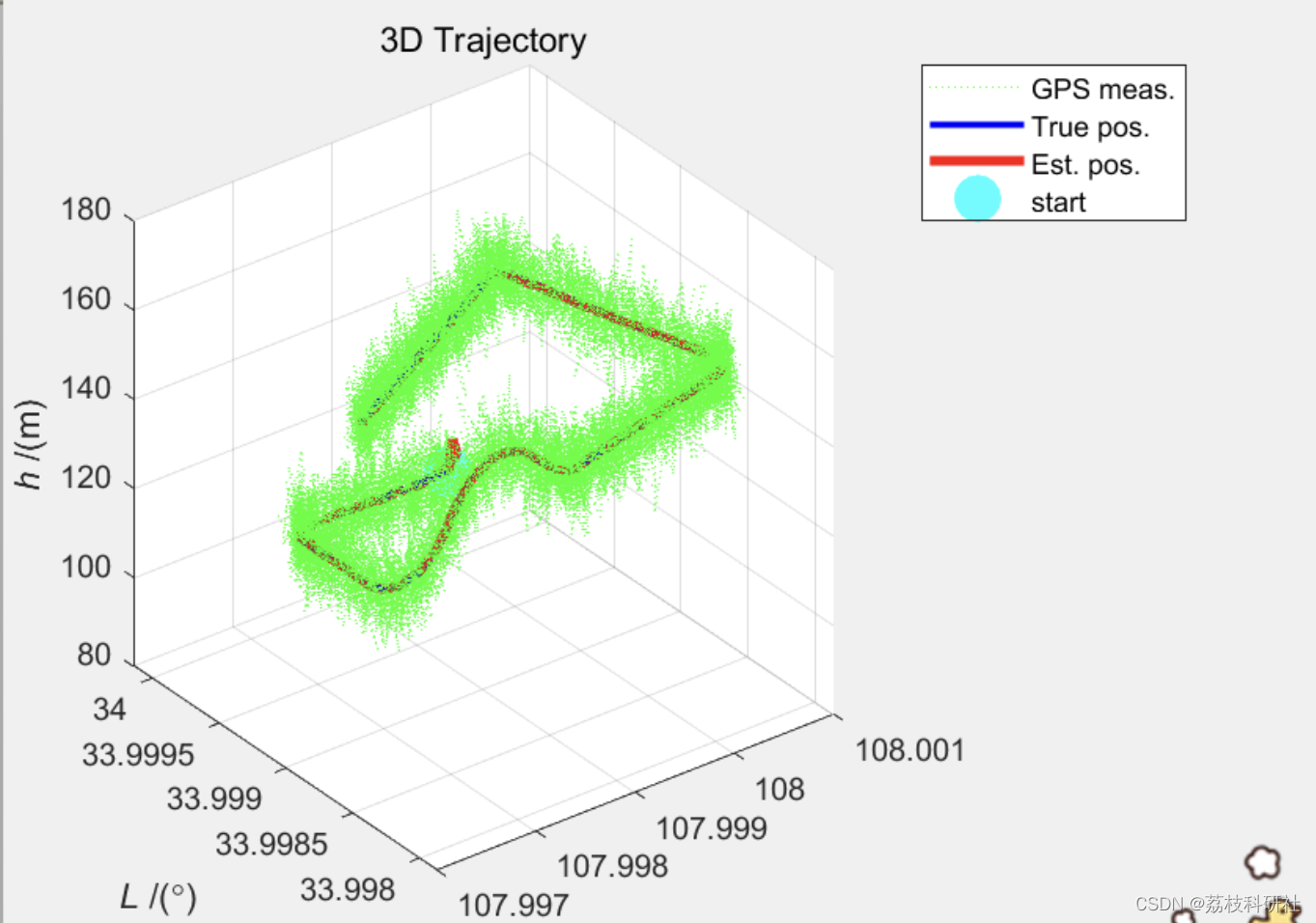
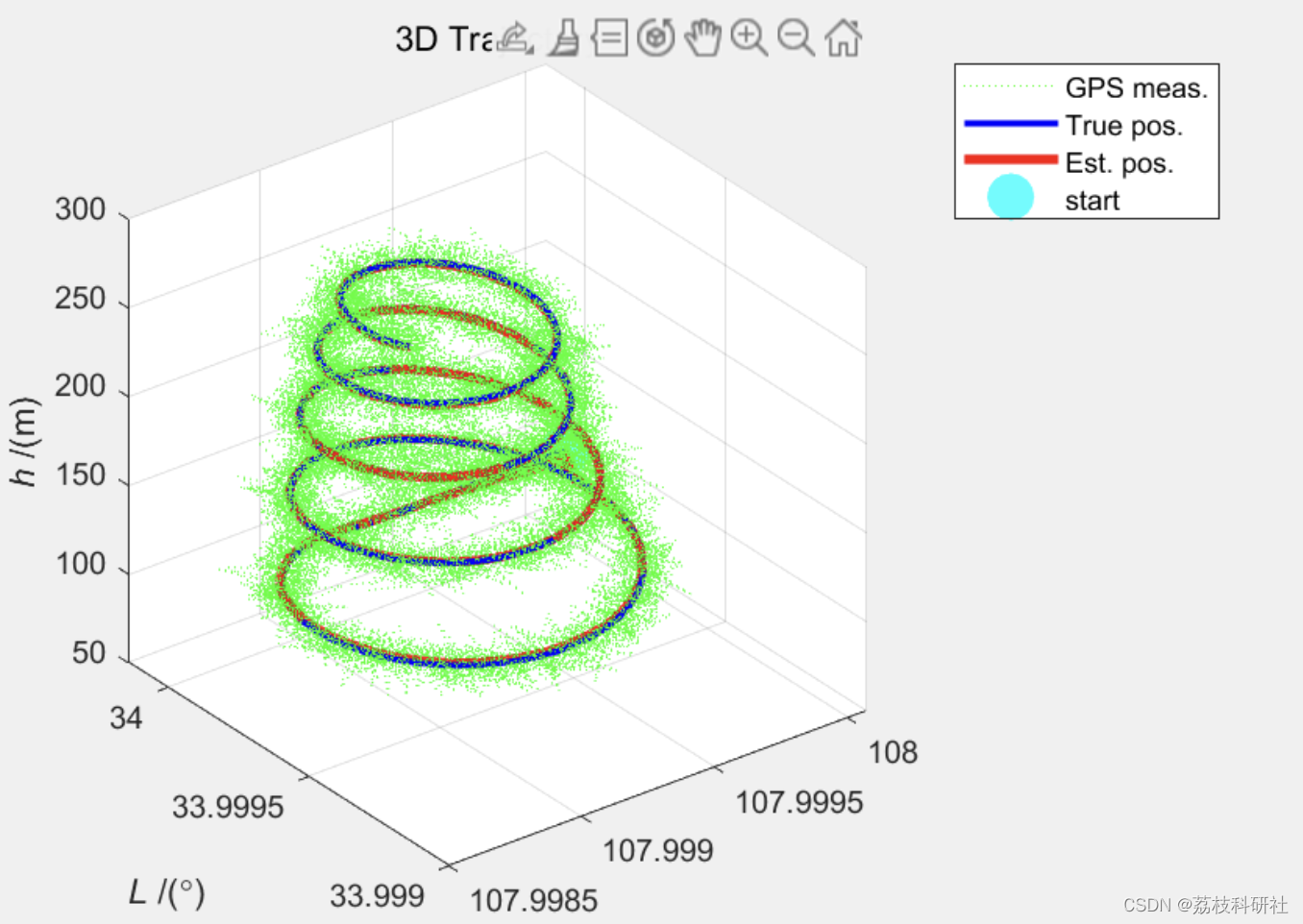
多旋翼无人机已被广泛应用于军事与民用领域。导航系统是多旋翼无人机的重要组成部分,是其实现安全与稳定飞行的基础。采用INS/GPS组合导航系统可实现高精度导航,该组合导航系统具有优势互补、导航机构冗余的特点,其实质是一个多传感器导航信息优化处理系统。无人机的主要导航参数就是依靠多传感器信息融合获得的,因此信息融合技术是组合导航系统的关键技术,目前已成为国内外学者研究的热点问题。随着多旋翼无人机向自主化和智能化发展,多旋翼无人机对其自身导航系统的性能提出了更高的要求。但是受多旋翼无人机自身成本的制约,导航系统中选用的传感器精度较低。针对这一矛盾,本文提出将无人机自带的微型惯导系统与GPS通过信息融合技术相结合,构成INS/GPS组合导航系统,由此能够提升导航系统的整体性能。本文的研究工作围绕组合导航系统的设计展开。除此之外,本文以课题组自行研制的全新结构多旋翼小型无人机为研究平台,展开对机载多传感器组合导航系统信息融合这一关键技术的研究。
📚2 运行结果

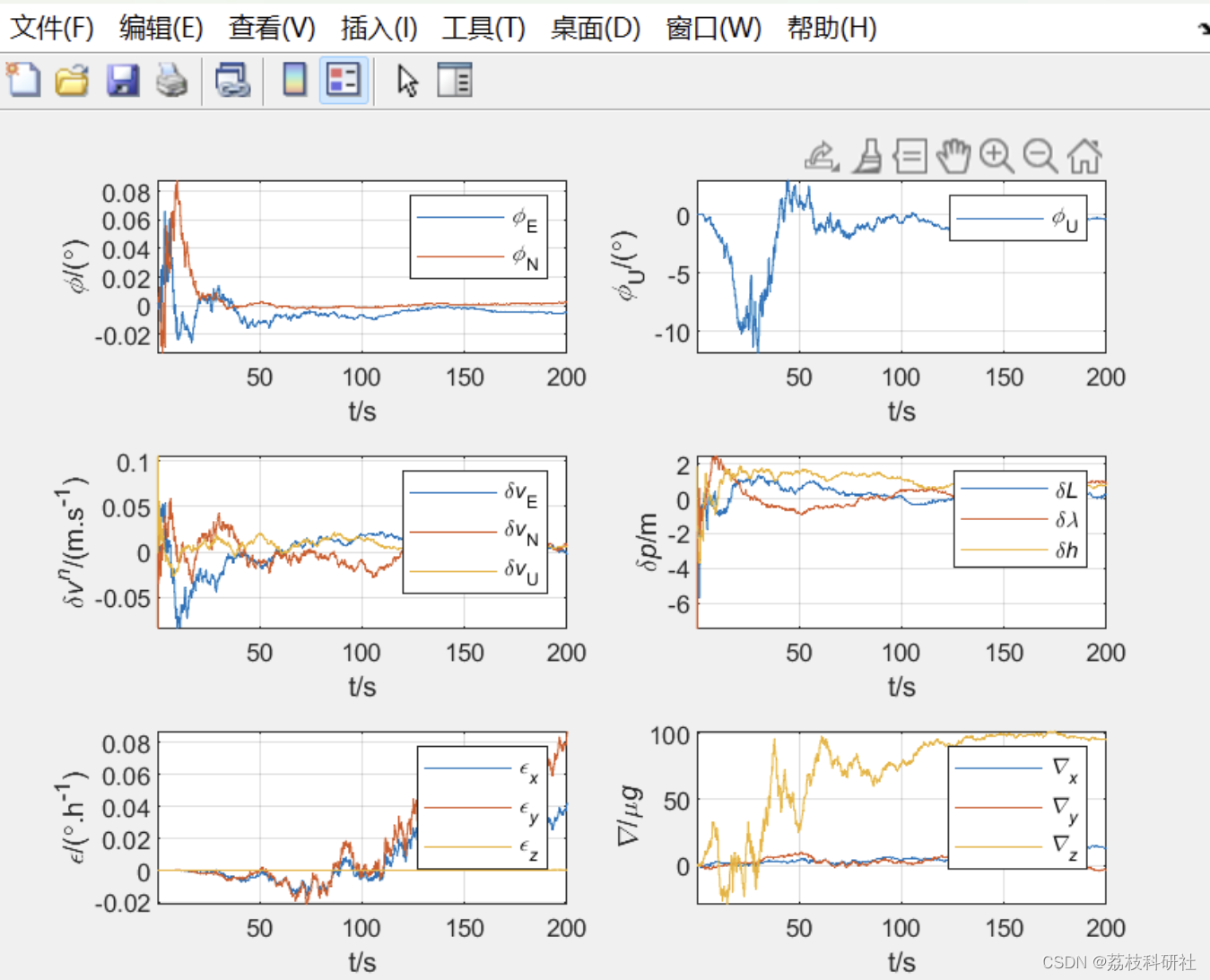
部分代码:
% load Uav true trajectory data.
addpath UavTrajectorySim;
disp(' ')
disp('Available UAV Truth Trajectory Data Files:')
dir_mat_files = dir('UavTrajectorySim\*.mat');
for nFile=1:length(dir_mat_files)
fprintf(' %d: %s\n',nFile,dir_mat_files(nFile).name);
end
% nFileChoice = input('Choose a UAV Truth data file (e.g. 1<Enter>): ');
try
% load(dir_mat_files(nFileChoice).name)
load(dir_mat_files(1).name)
catch
error('Selected UAV Truth Trajectory data file (%d) is invalid.\n',nFileChoice);
end
gvar_earth;
% 单次更新中使用的子样数
nn = 2;
% 采样时间
ts = 0.01;
nts = nn*ts;
% 初始姿态、速度、位置
att0 = [0, 0, 90]'*arcdeg;
vn0 = [0, 0, 0]';
pos0 = [34*arcdeg, 108*arcdeg, 100]'; % lattitude, longtitude, height
qbn0 = a2qua(att0);
% 姿态四元数、速度、位置
qbn = qbn0;
vn = vn0;
pos = pos0;
eth = earth(pos, vn);
% *** 添加误差 ***
% 失准角
phi = [0.1, 0.2, 1]'*arcmin;
qbn = qaddphi(qbn, phi);
% 陀螺零偏,角度随机游走
eb_ref = [0.1, 0.15, 0.2]'*dph;
eb = [0.01, 0.015, 0.02]'*dph;
web = [0.001, 0.001, 0.001]'*dpsh;
% 加计零偏,速度随机游走
db_ref = [800, 900, 1000]'*ug;
db = [80, 90, 100]'*ug;
wdb = [1, 1, 1]'*ugpsHz;
Qk = diag([web', wdb', zeros(1, 9)]')^2*nts;
rk = [[0.1, 0.1, 0.1], [5/Re, 5/Re, 5]]';
Rk = diag(rk)^2;
% 协方差矩阵,x = [phi, delta_vn, delta_p, eb, db]
P0 = diag([[0.1, 0.1, 10]*arcdeg, [1, 1, 1], [10/Re, 10/Re, 10]...
[0.1, 0.1, 0.1]*dph, [80, 90, 100]*ug]')^2;
% 量测矩阵
Hk = [zeros(6,3), eye(6), zeros(6, 6)];
% Kalman filter initialization
kf = kfinit(Qk, Rk, P0, zeros(15), Hk);
% 与模拟轨迹时长一致
kTime = fix(t_SD/ts);
err = zeros(kTime, 10);
xkpk = zeros(kTime, 2*kf.n + 1);
pos_ref = zeros(kTime,3);
pos_est = zeros(kTime,3);
pos_gps = zeros(kTime,3);
kk = 1;
t = 0;
for k = 2 : nn : kTime
t = t + nts;
% 获取模拟轨迹对应的imu输出: 角增量和速度增量(参考值)
wm(1:nn,:) = imu_SD.wm(k-nn+1:k,:);
vm(1:nn,:) = imu_SD.vm(k-nn+1:k,:);
% 为IMU参考输出添加噪声
[wm1, vm1] = imuadderr(wm, vm, eb, web, db, wdb, ts);
% 惯导更新:姿态四元数、速度、位置
[qbn, vn, pos, eth] = insupdate(qbn, vn, pos, wm1, vm1, ts);
% 基于模型预测:导航误差系统模型卡尔曼滤波
kf.Phikk_1 = eye(15) + kfft15(eth, q2mat(qbn), sum(vm1, 1)'/nts)*nts;
kf = kfupdate(kf);
% 模拟GPS量测数据
gps = [avp_SD.vn(k,:)'; avp_SD.pos(k,:)'] + rk.*randn(6, 1);
pos_gps(kk,:) = gps(4:6)';
% 量测更新 5Hz
if mod(t, 0.2) < nts
Zk = [vn', pos']' - gps;
kf = kfupdate(kf, Zk, 'M');
end
% Indirect Kalman filter:feedback to IMU (反馈校正法)
qbn = qdelphi(qbn, kf.Xk(1:3));
vn = vn - kf.Xk(4:6);
pos = pos - kf.Xk(7:9);
pos_est(kk,:) = pos';
% 反馈校正:由于反馈项的存在导致卡尔曼滤波的先验估计值始终为零. Ref: 王辰熙
kf.Xk(1:3) = 0;
kf.Xk(4:6) = 0;
kf.Xk(7:9) = 0;
% kf.Xk(10:12) = 0;
% kf.Xk(13:15) = 0;
% compute the error between estimation & truth data
% Note that this 'error' is not the 'state vector' in the Kalman equ.
% In indirect kalman filter, the 'state vector' means the error of
% the IMU update (respect to True data.)
qbn_ref = a2qua(avp_SD.att(k,:));
vn_ref = avp_SD.vn(k,:)';
pos_ref(kk,:) = avp_SD.pos(k,:);
err(kk, :) = [qq2phi(qbn, qbn_ref)', (vn - vn_ref)', (pos - pos_ref(kk,:)')', t];
xkpk(kk, :) = [kf.Xk', diag(kf.Pk)', t]';
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘洪剑,王耀南,谭建豪,李树帅,钟杭.一种旋翼无人机组合导航系统设计及应用[J].传感技术学报,2017,30(02):331-336.
🌈4 Matlab代码实现
相关文章:
多旋翼无人机组合导航系统-多源信息融合算法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

如何用ArkUI实现一个加入购物车效果?
关键词:ArkUI的动效能力,动效开发,ArkUI动画 我们在购买商品时,往往习惯将商品先加入购物车,然后在购物车里确认后再下订单,这是一个典型的访问者模式。对于这个高频场景,增添一些动效可以增加a…...
ChatGLM GPT原理介绍
图解GPT 除了BERT以外,另一个预训练模型GPT也给NLP领域带来了不少轰动,本节也对GPT做一个详细的讲解。 OpenAI提出的GPT-2模型(https://openai.com/blog/better-language-models/) 能够写出连贯并且高质量的文章,比之前语言模型效果好很多。GPT-2是基于Transformer搭建的,相…...

2015年蓝桥杯省赛C/C++ A组 灾后重建题解(100分)
10. 灾后重建 Pear市一共有N(<50000)个居民点,居民点之间有M(<200000)条双向道路相连。这些居民点两两之间都可以通过双向道路到达。这种情况一直持续到最近,一次严重的地震毁坏了全部M条道路。 震后…...
深分页Scroll)
Elasticsearch(四)深分页Scroll
一、前言 1.1、scroll与fromsize区别 ES对于fromsize的个数是有限制的,二者之和不能超过1w。当所请求的数据总量大于1w时,可用scroll来代替fromsize。 fromsize在ES查询数据的方式步骤如下: 1、先将用户指定的关键字进行分词;…...
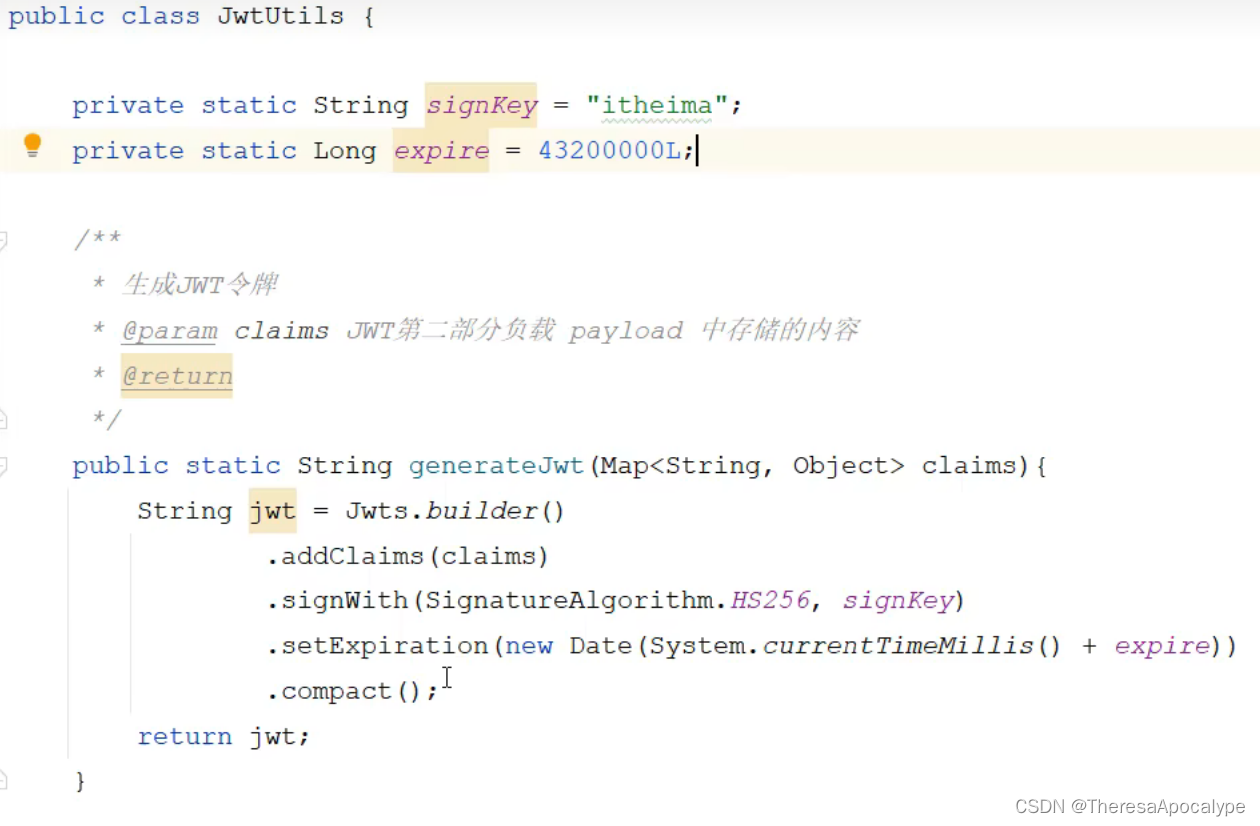
JavaWeb后端开发 JWT令牌解析 登录校验 通用模板/SpringBoot整合
目录 实现思路 会话跟踪的三个方案--引出Jwt令牌技术 1.访问cookie的值,在同一会话的不同请求之间共享数据 2.session 3.现代普遍采用的令牌技术--JWT令牌 JWT令牌技术 第一步--生成令牌 1.引入依赖 2.生成令牌 第二步--校验令牌 第三步--登录下发令牌 需要解决的…...

Sparta工具用法描述之信息收集(漏洞分析)
声明:本文仅做学习与交流,任何用于非法用途、行为等造成他人损失的,责任自负。本文不承担任何法律责任。 Sparta是python GUI应用程序,它通过在扫描和枚举阶段协助渗透测试仪来简化网络基础结构渗透测试。 通过点击并单击工具箱并以方便的方式显示所有工具输出,它可以使测…...
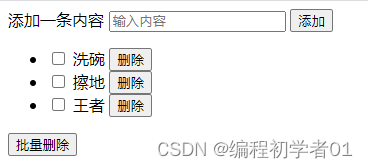
Vue复选框批量删除示例
Vue复选框批量删除 通过使用v-model指令绑定单个复选框 例如<input type"checkbox" id"checkbox" v-model"checked"> 而本次我们要做的示例大致是这样的,首先可以增加内容,然后通过勾选来进行单独或者批量删除&…...

Docker自定义镜像
一、镜像结构 镜像是将应用程序及其需要的系统函数库、环境、配置、依赖打包而成。 镜像是分层结构,每一层称为一个Layer BaseImage层:包含基本的系统函数库、环境变量、文件系统其它:在BaseImage基础上添加依赖、安装程序、完成整个应用的…...

ardupilot的编译过程
环境 树莓派4b ubuntu20.04 git 2.25.1 python3.8.10 pixhawk2.4.8 下载源码 (已经配置好git环境和ssh) git clone --recurse-submodules gitgithub.com:ArduPilot/ardupilot.gitcd ardupilotgit status使用git status检查是否下载完整 如果不完整&a…...
Unity中Shader实现模板测试Stencil
文章目录 前言一、UI中的遮罩1、Mask ——> 模板测试2、RectMask2D ——> UNITY_UI_CLIP_RECT 二、模板缓冲区Stencil一般是和Pass平行的部分,Pass部分写的是颜色缓冲区Stencil:Comp(比较操作)Pass(模版缓冲区的更新) 三、实际使用1、在…...

多线程与并发
多线程与高并发 线程的创建方式1.继承Thread类 重写run方法2.实现Runnable接口 重写run方法3. 实现Callable 重写call方法,配合FutureTask 线程的使用1.线程的状态1.1. 传统操作系统层面5种状态1.2.Java中给线程准备的6种状态 2.线程的常用方法2.1 获取当前线程2.2 …...

手写call方法
Function.prototype.myCallfunction (context,args) {console.log(arguments)//context 表示call里面的第一个参数也就是需要改变this指向的那个对象。//this表示这个方法//把这个方法挂到需要改变指向的对象身上调用,相当于把this指向了这个对象身上,从…...
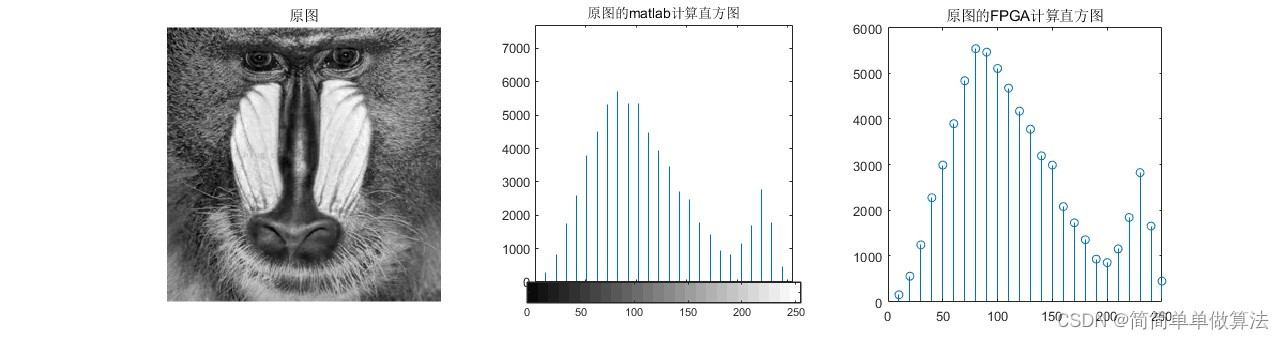
基于FPGA的图像直方图统计实现,包括tb测试文件和MATLAB辅助验证
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1、图像数据传输 4.2、直方图统计算法 4.3、时序控制和电路设计 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 vivado2019.2 matlab2022a 3.部分核心程序 timescal…...
数据库:Hive转Presto(一)
本人因为工作原因,经常使用hive以及presto,一般是编写hive完成工作,服务器原因,presto会跑的更快一些,所以工作的时候会使用presto验证结果,所以就要频繁hive转presto,为了方便,我用…...

Responder
环境准备 操作系统:Kali Linux工具:responder,john,evil-winrm PS:输入以下命令解决靶场环境无法打开问题 #echo "<靶机IP> unika.htb">>/etc/hostsresponder工具 [Kali 官网] 手册地址:https://www.kali.org/tools/responder/ 摘要: This package c…...
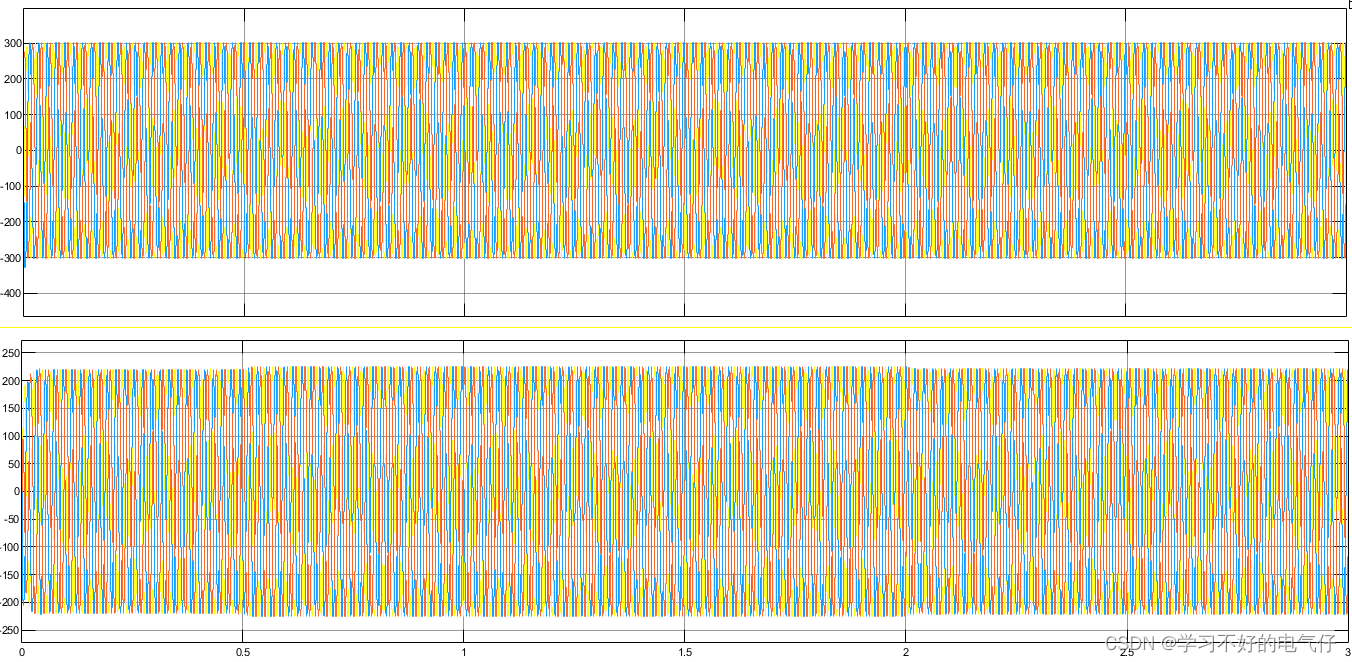
基于下垂控制的并网逆变器控制MATLAB仿真模型
微❤关注“电气仔推送”获得资料(专享优惠) 主要模块: 建议使用MATLAB2021b及以上版本打开! 功率计算模块、下垂控制模块、电压电流双环控制模块、虚拟阻抗压降模块 扰动设置: 在0.5秒到2秒始端设置0.25Hz的电网频…...

android获取RAM、CPU频率、系统版本、CPU核数
参考链接: https://www.jianshu.com/p/76d68d13c475 https://github.com/matthewYang92/Themis 获取CPU频率、核数的逻辑,是通过文件操作实现的,Android是基于Linux系统的,所以该方式针对不同的手机都是可靠的操作方式。 RAM&am…...
微信小程序python+nodejs+php+springboot+vue 讲座预约系统
讲座预约管理系统的用户是系统最根本使用者,按需要分析系统包括用户:学生、管理员。 管理员通过后台的登录页面,选择管理员权限后进行登录,管理员的权限包括学生信息管理和文章公告管理。讲座公告管理,添加讲座公告信息…...
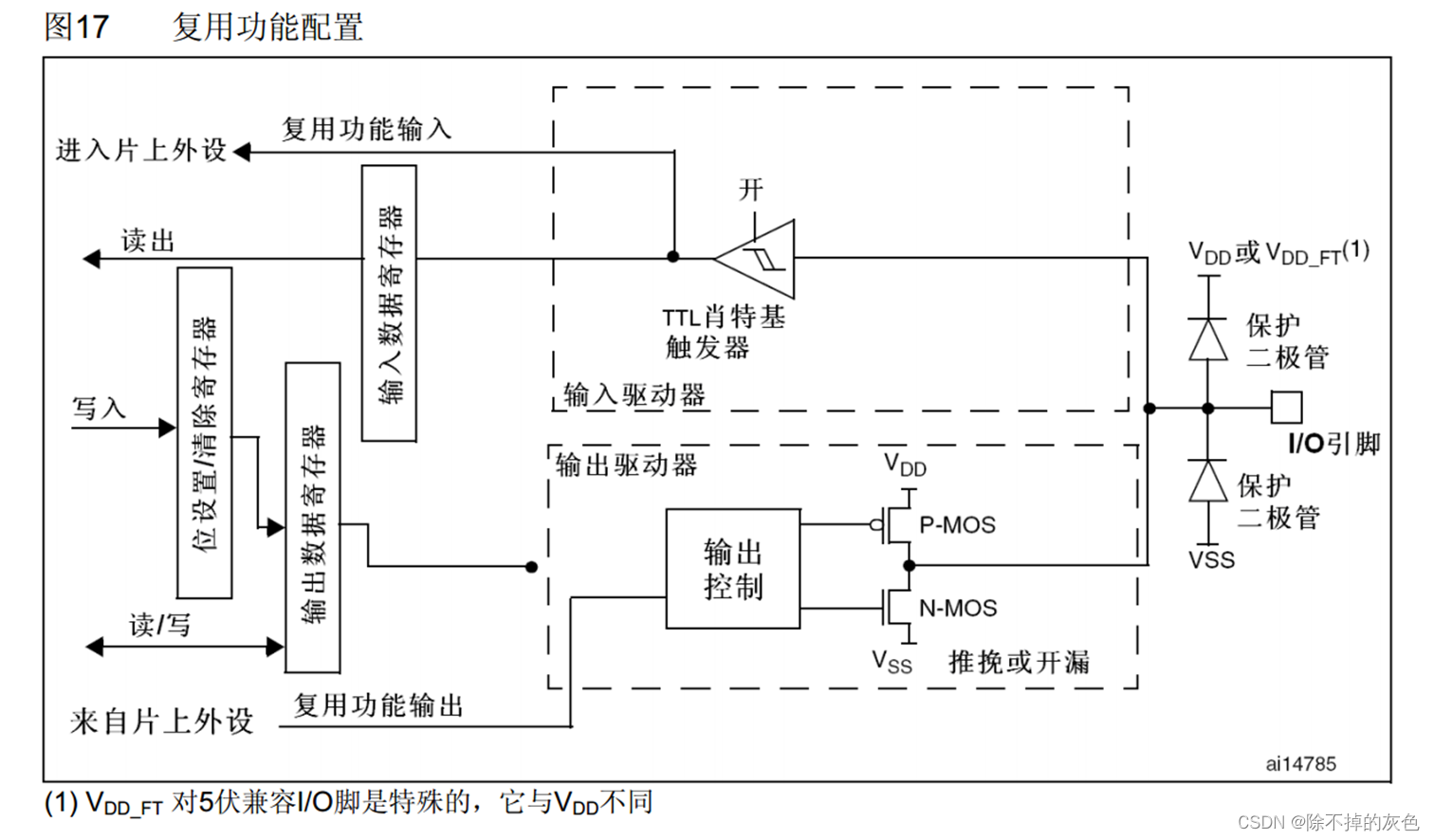
嵌入式开发笔记:STM32的外设GPIO知识学习
GPIO简介: • GPIO ( General Purpose Input Output )通用输入输出口 • 可配置为 8 种输入输出模式 • 引脚电平: 0V~3.3V ,部分引脚可容忍 5V (如舵机和驱动直流电机) • 输出模式下可控制端口…...

手把手教你用PyTorch复现Qwen2.5的GQA:从MHA到GQA的代码演进与性能对比
从零实现Qwen2.5的GQA机制:PyTorch实战与性能深度剖析 当我们在讨论现代大语言模型的高效推理时,注意力机制的优化始终是核心议题。Qwen2.5采用的Grouped Query Attention(GQA)既不是对传统多头注意力(MHA)的简单改良,也不是多查询注意力(MQA…...

利用快马平台快速构建c++学生成绩管理系统原型
最近在尝试用C快速验证一个学生成绩管理系统的原型设计,发现用InsCode(快马)平台可以省去很多环境配置的麻烦。这里记录下实现过程和一些实用技巧,特别适合需要快速验证算法思路的场景。 数据结构设计 首先需要确定如何存储学生信息。我选择用结构体来定…...

STM32单片机NRST管脚异常复位问题解析与EMC设计优化
1. STM32单片机NRST管脚异常复位问题解析最近在客户现场遇到一个棘手的STM32G474单片机异常复位问题,发生在EMS浪涌测试过程中。作为嵌入式开发者,复位问题往往是最让人头疼的故障之一。今天我就把这个案例的完整排查过程和解决方案分享给大家࿰…...

开启iphone的墙纸玻璃效果
要开启 iPhone 的墙纸“玻璃效果”,需注意:苹果并未在 iOS 中提供名为“玻璃效果”的独立开关,但通过 “液态玻璃”(Liquid Glass)设计风格 和 “空间场景”壁纸 等功能,可实现类似视觉效果。以下是基于最新公开资料的操作指南&am…...

Python自动化脚本:高效实现CSV到Little_R格式的批量转换
1. 为什么需要CSV到Little_R格式的转换? 在日常数据处理工作中,我们经常会遇到需要将数据从一种格式转换为另一种格式的需求。特别是对于气象研究人员和数据工程师来说,CSV和Little_R这两种格式的转换尤为常见。CSV(Comma-Separat…...

Windows下MySQL服务报错1067别急着重装!一个my.ini参数拯救你的数据库
Windows下MySQL服务报错1067的深度修复指南 当你在Windows服务器上突然遭遇MySQL服务罢工,事件查看器里赫然显示着"错误1067:进程意外终止"的红色警告,那种焦虑感足以让任何运维人员心跳加速。但别急着掏出重装系统的终极武器——本…...

Wan2.2-T2V-A5B科研工具链:Matlab数据可视化与模型输入预处理
Wan2.2-T2V-A5B科研工具链:Matlab数据可视化与模型输入预处理 1. 引言 做科研的朋友们,你们有没有遇到过这样的场景:手头有一堆宝贵的实验数据,想用Wan2.2-T2V-A5B这样的文生视频模型,把数据背后的科学故事“演”出来…...

Brax视觉化工具详解:从HTML渲染到实时动画的完整流程
Brax视觉化工具详解:从HTML渲染到实时动画的完整流程 【免费下载链接】brax Massively parallel rigidbody physics simulation on accelerator hardware. 项目地址: https://gitcode.com/gh_mirrors/br/brax Brax是一个基于加速器硬件的大规模并行刚体物理模…...

软件评测师基础知识专项刷题:软件测试过程
前言软考软件评测师备考之路,基础刷题必不可少。本文围绕软件测试过程模块整理经典习题 核心考点梳理,系列内容长期连载更新,慢慢积累、逐个突破,轻松夯实应试功底。考点测试过程模型1.组织级测试过程组织级测试过程用于开发和管…...

城通网盘下载慢到心碎?这个开源工具让你1秒获取高速直连地址
城通网盘下载慢到心碎?这个开源工具让你1秒获取高速直连地址 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 你是否曾经遇到过这样的情况:从城通网盘下载一个重要的学习资料&…...