虹科分享 | 为工业机器人解绑,IO-Link wireless无线通讯技术可实现更加轻量灵活的机器人协作
背景
机器人是一种能够半自主或全自主工作的智能机器。中国电子学会组织发布的《中国机器人产业发展报告(2022年)显示,近些年,我国机器人市场规模持续快速增长,“机器人+”应用不断拓展深入,预计五年年均增长率达到22%。而机器人产业的高质量发展,则离不开强化核心技术研发,加快突破机器人系统开发、操作系统、轻量化设计、多机器人协作等共性技术。
机械臂可以更精确、更快速、更高效地执行以往由人工完成的复杂操作,从而在现代工厂中发挥着关键的作用。机械臂既可以单独行动(机器人),也可以在协作环境中与人类操作员一起行动(协作机器人)。但无论是执行装配任务、拾取和投放还是处理危险材料,机器人和协作机器人都需要在机械臂末端安装传感器和执行器,即通常所说的末端执行器。
困难与挑战
难点1:监控自由度
对于末端执行器的操作,除了动力之外,实现自动化还需要控制和监测的连接性。然而,机器人技术的关键要求是运动、旋转和拐弯的自由度和灵活性。这就意味着,能够到达末端执行器的布线必须设计得不会限制机械臂的实际操作。这对许多设计来说都是一项极具挑战性的任务,也是连接性和灵活性之间的一项重要工程权衡。
难点2:模块化
机器人和协作机器人通常被设计成一个平台,其关键功能是运动、旋转和弯曲。因此,用于提升或抓取的机械臂与用于焊接或拧螺丝的机器人具有相同的机械结构。唯一的区别在于后期根据生产设施的实际部署和自动化任务来选择的末端执行器。末端执行器制造商与机器人制造商往往是不同的实体,需要独立的通信渠道。此外,高级应用可能需要部署多个传感器和执行器,这就需要不同的带宽和连接规格。
难点3:改造与协作
在机械臂末端安装特定或额外末端执行器的一种解决方案是使用安装配件进行外部布线。虽然这种解决方案可以解决连接性和模块化方面的限制,但成本高且繁琐,还会对机器人的运动和功能造成额外的限制。对于人与机械臂连接的协作机器人来说,外部布线构成了更大的障碍,使协作变得更加复杂。
IO-Link wireless工业无线解决方案
由于机械臂末端执行器方面的限制,许多应用都需要无线连接。无线连接使设计和外形尺寸更合理,而且无需考虑电缆,可实现连续旋转、更大的操作范围以及传感器和执行器的模块化部署等功能。它还能降低部署成本、维护成本(由于电缆磨损)和意外停机时间。
然而,传统的无线技术并不适合机器人和协作机器人提出的工业操作要求。在工业自动化中操作执行器和监控传感器需要极低的延迟和响应时间,以及高可靠性和抗干扰性。Wi-Fi、蓝牙和Zigbee等技术在此类应用中既不可靠,速度也不够快。
架构部署
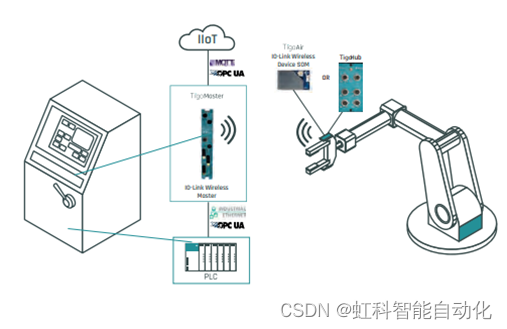
为了实现这一解决方案,虹科TigoAir系列无线设备连接SOM(系统模块)可集成在机械臂末端,允许通过IO-Link wireless连接到末端执行器。它可无线连接到TigoMaster,后者最多可控制16台设备。TigoMaster既可以安装在机器人上,也可以安装在生产线的控制箱中,用于控制多个机器人的末端执行器。虹科Tigomaster能够通过已有的工业通讯协议(如EtherNet/IP, EtherCAT,PROFINET或OPC UA)与自动化PLC进行实时数据传输和控制,在工业以太网并行系统中还可通过 MQTT 和 OPC UA 等协议向 IIoT 平台发送监控数据。
应用
虹科TigoAir SOM模块已被领先的末端执行器供应商采用,并实现了前所未有的应用。其中一种设计是用于模块化部署的机械臂末端支架,目前可支持顶级制造商生产的各种型号的真空泵和机械手。配备了这种IO-Link Wireless支架的机械臂平台可以完全独立于布线,并根据需要配备所需的执行器。因此,它仍能像有线连接一样执行所有要求的任务,而且不受电缆的限制。
其他末端执行器可作为改装件安装在任何机器人/协作机器人平台上,使用虹科TigoBridge可将任何IO-Link设备无缝转换为IO-Link Wireless设备,无需专门设计或预先集成。TigoBridge是带IP67防护等级外壳的独立装置,开箱即可使用,无需集成,也可作为SOM供设备制造商快速、低成本地集成到现有设备中。
总结
IO-Link wireless技术可实现传感器和执行器之间的无线通信,为智能工厂和生产线提供强大、可靠和安全的通信解决方案。虹科IO-Link解决方案基于开放代码的IO-Link协议,该协议已扩展到无线使用以实现各种解决方案,例如运输轨道和输送系统,无线机器人,智能机床,旋转台、转盘以及状态监测和机器改造。
相关文章:
虹科分享 | 为工业机器人解绑,IO-Link wireless无线通讯技术可实现更加轻量灵活的机器人协作
背景 机器人是一种能够半自主或全自主工作的智能机器。中国电子学会组织发布的《中国机器人产业发展报告(2022年)显示,近些年,我国机器人市场规模持续快速增长,“机器人”应用不断拓展深入,预计五年年均增…...

【PickerView案例10-国旗选择界面02 Objective-C预言】
一、好了,我们继续来实现这个国旗选择界面: 1.它的界面里面,是不是很简单,就一个UIPickerView,就完事儿了 然后,显示的每一行内容呢, 1)一个文字Label 2)一个图片 那大家应该有意识,它返回的应该是一个View,对吧, 代理方法里面,有一个返回View的,viewForRow…...

面试打底稿⑤ 项目一的第一部分
简历原文 抽查部分 项目描述 该项目旨在服务广州地区的快递物流,实现了下单、快递员取派件、订单转运单、线路规划、网点设置等功能。 责任描述 登录系统优化,双token三验证模式实现设置token状态、提高登录安全性的效果 模拟问答 1.能简单介绍一下…...
让AI解释PSINS中的各种卡尔曼滤波函数)
PSINS工具箱学习(三)让AI解释PSINS中的各种卡尔曼滤波函数
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning PSINS 中的 Kalman 滤波代码都在百行以内,没调用什么函数,而且通用性很强,拿去让 AI 解释,效果挺好。 文章目…...
多边形碰撞检测算法
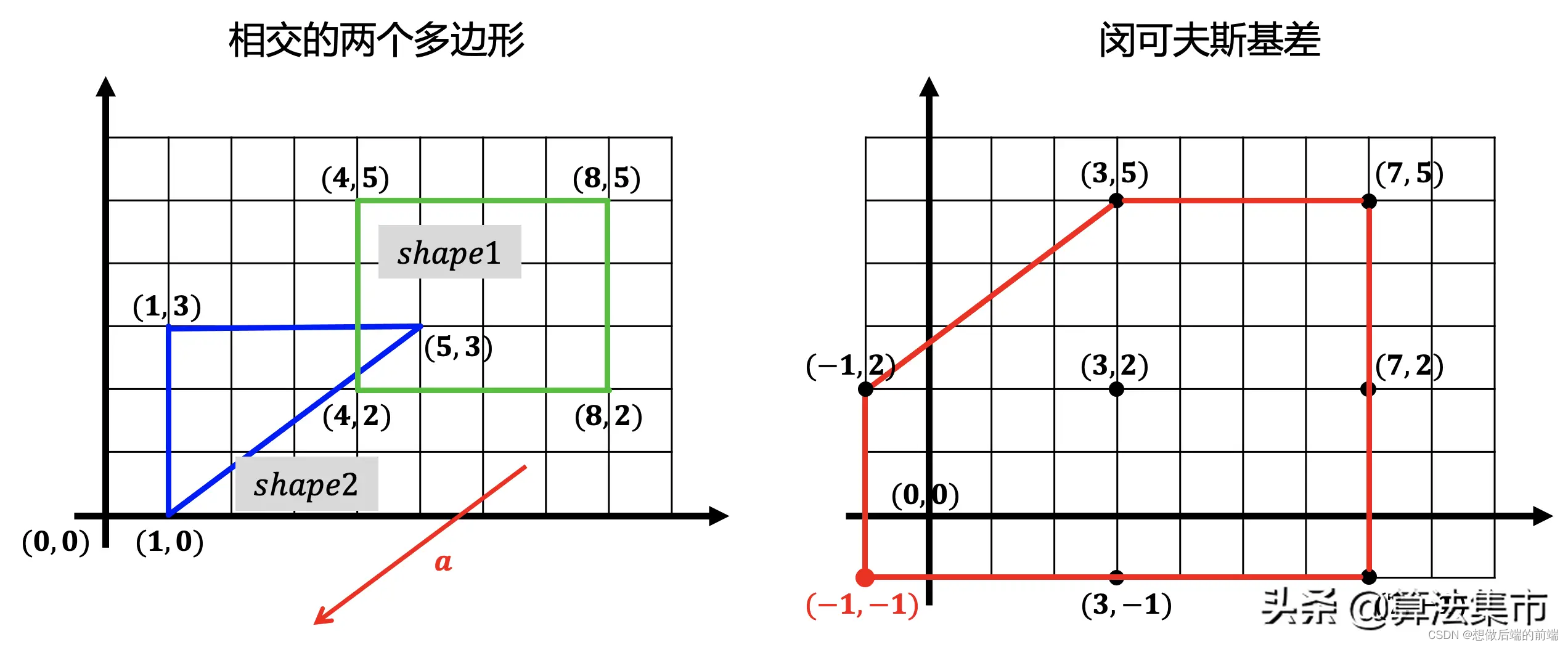
1、AABB碰撞检测算法 AABB碰撞检测指轴对齐碰撞箱(Axis-aligned Bounding Box),是分别从x轴向和y轴向进行碰撞检测的算法。即对于需要检测的物体A和物体B我们需要将其用A盒和B盒套起来,判断A盒和B盒在x轴向和y轴向是否发生碰撞,只有在x轴向和…...
【C/C++笔试练习】——printf在使用%的注意事项、for循环语句的三个条件、运算符优先级、删除公共字符
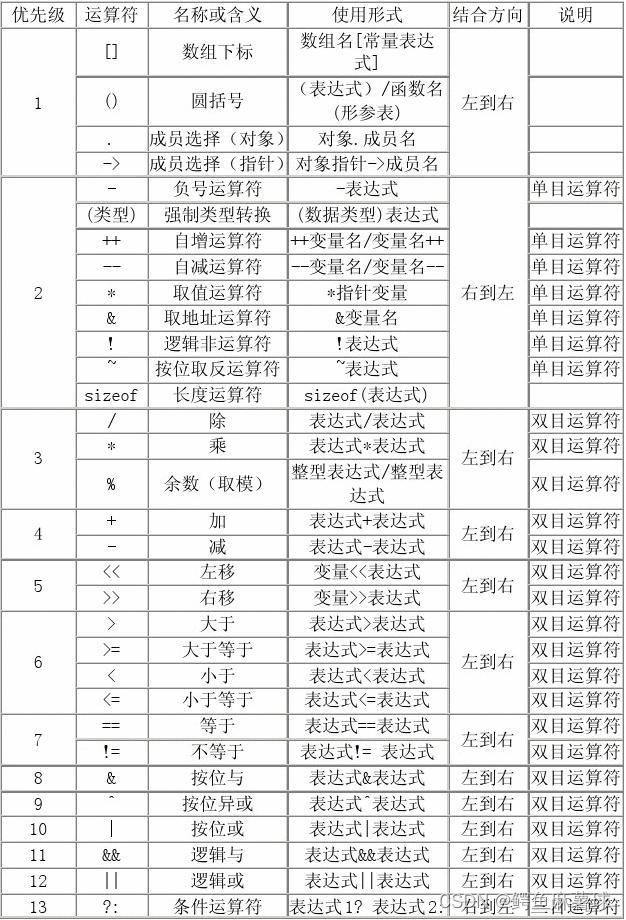
文章目录 C/C笔试练习1.%符号在printf用作格式说明符的注意事项(1)输出%5.3s(2)判断%中小数点含义 2.for循环语句的三个条件(3)判断循环次数(4)判断循环次数 3.运算符优先级…...
Linux部署elk日志监控系统
目录 一、简介 二、部署elasticsearch 2.1 安装jdk11(jdk版本>11) 2.2 下载安装包 2.3 授权elk用户 2.4 配置elasticsearch.yml 2.5 启动elasticsearch 三、部署logstash 3.1 启动测试 3.2 可能出现的报错 3.3 指定配置文件启动logstash 3.4 安装El…...
)
LINUX -SQL笔记(自学用)
1.安装 sudo apt-get install mysql-server sudo mysql -u root -p2.关系模型 在关系数据库中,一张表中的每一行数据被称为一条记录。一条记录就是由多个字段组成的。 每一条记录都包含若干定义好的字段。同一个表的所有记录都有相同的字段定义。 对于关系表&#…...
【Spark】win10配置IDEA、saprk、hadoop和scala
终于,要对并行计算下手了哈哈哈。 一直讲大数据大数据,我单次数据处理量大概在1t上下,是过亿级的轨迹数据。 用python调用multiprogress编写的代码,用多线程也要一个多月跑完。 我对这个效率不太满意,希望能快一点再快…...
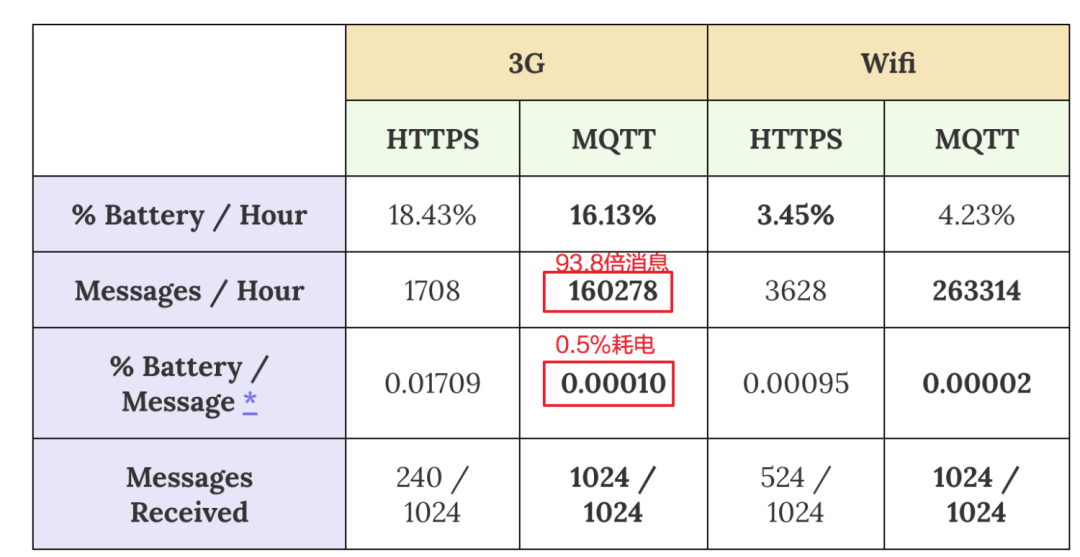
MQTT 协议概要
01 MQTT协议 MQTT(消息队列遥测传输) 是基于 TCP/IP 协议栈而构建的支持在各方之间异步通信的消息协议。MQTT在空间和时间上将消息发送者与接收者分离,因此可以在不可靠的网络环境中进行扩展。虽然叫做消息队列遥测传输,但它与消息…...

向量数据库X云计算驱动大模型落地电商行业,Zilliz联合AWS探索并贡献成熟解决方案
近日,由Zilliz 联合亚马逊云科技举办的【向量数据库 X 云计算 驱动大模型落地电商行业】活动在上海落幕,获得业内专业人士的广泛好评。 众所周知,大模型技术的发展正加速对千行万业的改革和重塑,向量数据库作为大模型的海量记忆体、云计算作为大模型的大算力平台,是大模型…...

【vue2】解决Vuex刷新页面数据丢失的问题
最近写vue2 项目需要用到vuex, 但遇到一个问题,存进store里的数据刷新就丢失了,于是乎百度解决。将自己的感受与解决方法记录下来。 数据丢失的原因 vuex存储的数据只是在页面中,相当于全局变量,页面刷新的时候vuex里的数据会重…...
小皮面板配置Xdebug,调试单个php文件
小皮面板配置Xdebug 首先下载phpstrom,和小皮面板 打开小皮面板,选中好要使用的php版本 然后点击【管理】> 【php扩展】> 【xdebug】 然后打开选中好版本的php位置 D:\Program_Files\phpstudy_pro\Extensions\php\php7.4.3nts打开php.ini文件…...

版本控制系统:Perforce Helix Core -2023
Perforce Helix Core是领先的版本控制系统,适用于需要加速大规模创新的团队。存储并跟踪您所有数字资产的更改,从源代码到二进制再到IP。连接您的团队,让他们更快地行动,更好地构建。 通过 Perforce 版本控制加速创新 Perforce H…...

回归预测 | Matlab实现基于MIC-BP最大互信息系数数据特征选择算法结合BP神经网络的数据回归预测
回归预测 | Matlab实现基于MIC-BP最大互信息系数数据特征选择算法结合BP神经网络的数据回归预测 目录 回归预测 | Matlab实现基于MIC-BP最大互信息系数数据特征选择算法结合BP神经网络的数据回归预测效果一览基本介绍研究内容程序设计参考资料 效果一览 基本介绍 Matlab实现基于…...

Hive-命令行CDH访问开启kerberos的hive
1.通过hive用户访问 切换用户为hive [rootslave conf]# su - hive 上一次登录:五 4月 12 13:59:19 CST 2019pts/1 上 [hiveslave ~]$命令行直接输入hive就可以进入hive [hiveslave ~]$ hive log4j:WARN No such property [maxFileSize] in org.apache.log4j.Dail…...
手机能搜到某个wifi,电脑搜不到解决方法(也许有用)
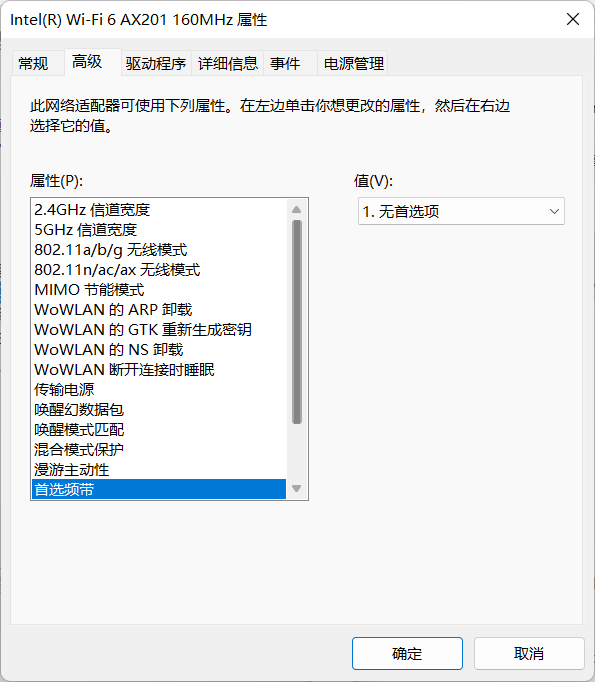
方法一:更新驱动 下载驱动大师、驱动精灵等等驱动软件,更新网卡驱动 方法二 按 win 键,打开菜单 搜索 查看网络连接(win11版本是搜这个名字) 点击打开是这样式的 然后对 WLAN右击->属性->配置->高级 这…...
Java-day18(网络编程)
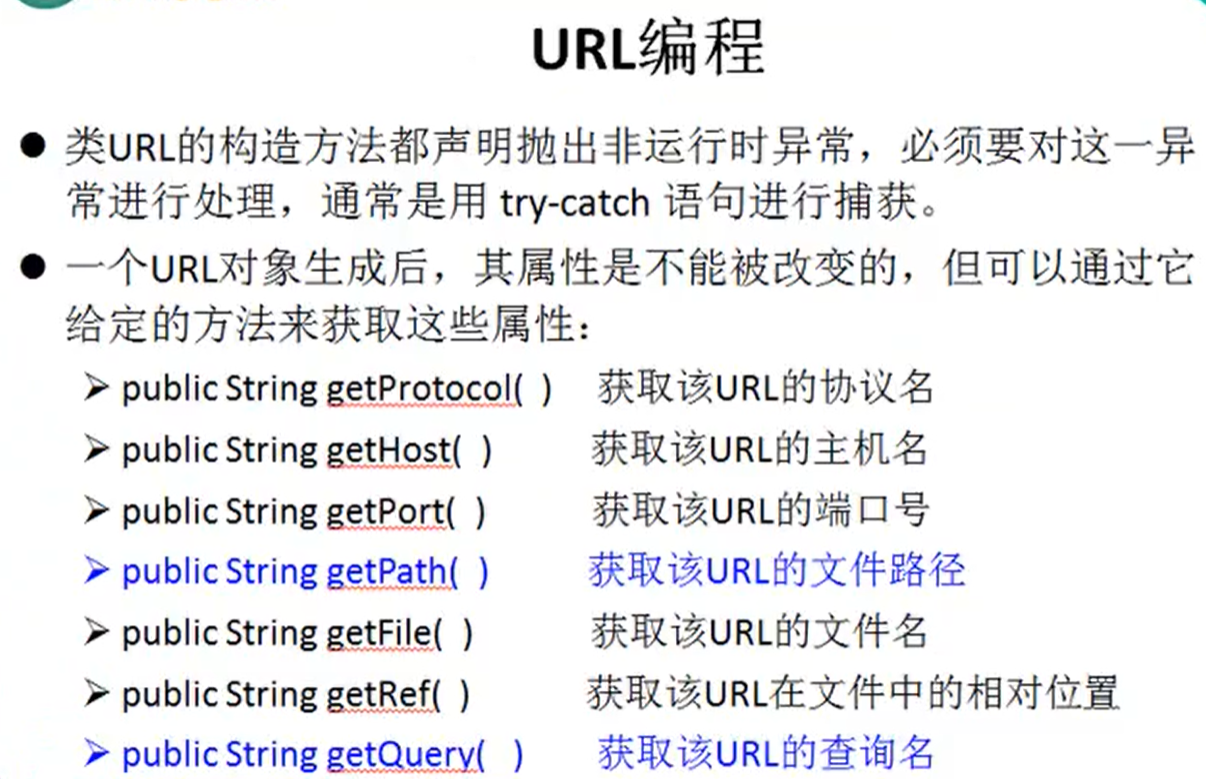
网络编程 1.概述 Java提供跨平台的网络类库,可以实现无痛的网络连接,程序员面对的是一个统一的网络编程环境 网络编程的目的:直接或间接地通过网络协议与其他计算机进行通信 网络编程的两个主要问题: 1.如何准确定位网络上一台…...
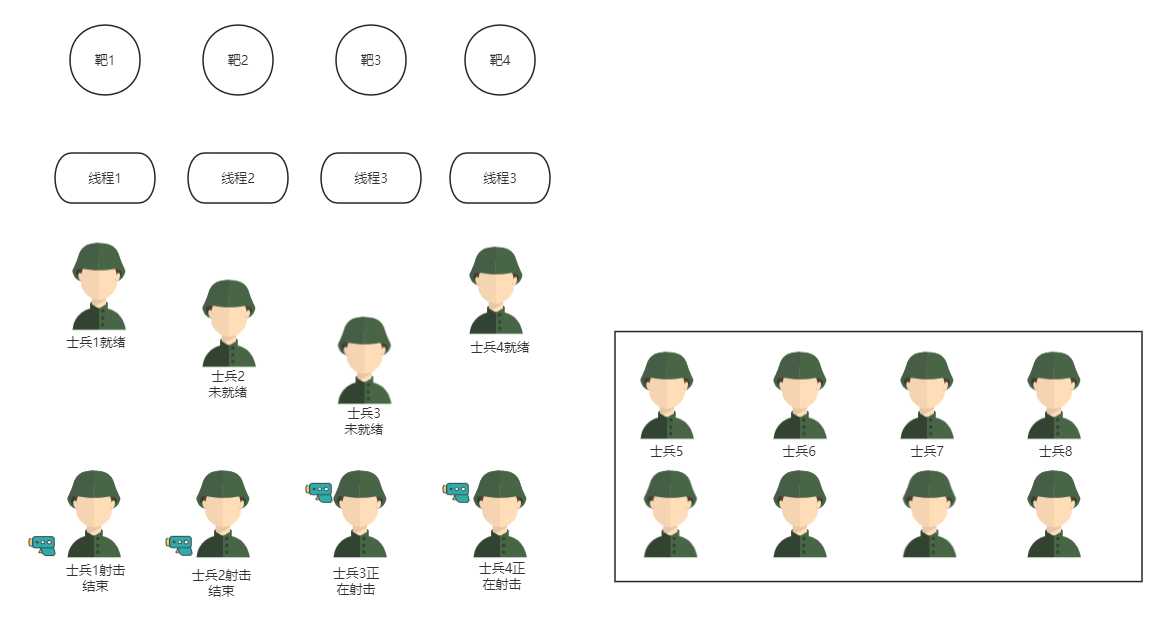
Java多线程编程-栅栏CyclicBarrier实例
前言 本文是基于《Java多线程编程实战指南-核心篇》第五章个人理解,源码是摘抄作者的源码,源码会加上自己的理解。读书笔记目前笔者正在更新如下, 《Java多线程编程实战指南-核心篇》,《How Tomcat Works》,再到《spr…...
【100天精通Python】Day67:Python可视化_Matplotlib 绘制动画,2D、3D 动画 示例+代码
1 绘制2D动画(animation) Matplotlib是一个Python绘图库,它提供了丰富的绘图功能,包括绘制动画。要绘制动画,Matplotlib提供了FuncAnimation类,允许您创建基于函数的动画。下面是一个详细的Matplotlib动画示…...

官宣!网络安全法正式实施,人才缺口 327 万,这 5 类人直接站上风口,年薪百万不是梦
【必看收藏】网络安全人才抢夺战打响!新法实施后5类专业薪资翻倍,附学习路线 新《网络安全法》实施引爆网络安全人才市场,全球缺口480万,中国缺口327万以上。网络空间安全、信息安全、保密技术、网络安全科学与技术、信息对抗技术…...

双碳目标下太阳辐射预报模式【WRF-SOLAR】模拟方法及改进技术在气象、农林生态、电力等相关领域中的实践应用
太阳能是一种清洁能源,合理有效开发太阳能资源对减少污染、保护环境以及应对气候变化和能源安全具有非常重要的实际意义,为了实现能源和环境的可持续发展,近年来世界各国都高度重视太阳能资源的开发利用;另外太阳辐射的光谱成分、…...

基于MCP与Apify构建自动化特许经营尽职调查智能体
1. 项目概述与核心价值最近在梳理一些自动化数据采集和商业智能分析的项目时,我遇到了一个非常有意思的工具:apifyforge/franchise-due-diligence-mcp。这个项目名字听起来有点长,但拆解一下就能明白它的核心价值——它是一个基于MCP…...

从零上手SUSTechPOINTS:高效完成三维点云数据标注的完整指南
1. 初识SUSTechPOINTS:三维点云标注利器 第一次接触三维点云标注的朋友可能会被各种专业术语吓到,其实用对工具就能事半功倍。SUSTechPOINTS是我用过最顺手的三维点云标注工具之一,特别适合自动驾驶和机器人领域的初学者。这个开源工具不仅支…...

守护进程Guardian:轻量级进程保活与高可用架构实践
1. 项目概述:一个守护进程的诞生与使命在分布式系统和微服务架构大行其道的今天,服务的稳定性与可靠性成为了悬在每个开发者头顶的达摩克利斯之剑。服务挂了怎么办?进程意外退出如何自动恢复?配置热更新如何无感生效?这…...

Claude与Figma智能协作:基于MCP协议的设计自动化实践
1. 项目概述:当Claude遇上Figma,设计协作的智能革命如果你是一名产品设计师或前端工程师,大概率经历过这样的场景:在Figma里反复调整一个组件的间距,只为找到那个“感觉对了”的数值;或者为了统一整个项目的…...

如何通过LizzieYzy围棋AI分析工具在30天内实现棋力突破:从入门到实战的完整指南
如何通过LizzieYzy围棋AI分析工具在30天内实现棋力突破:从入门到实战的完整指南 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 在围棋AI技术飞速发展的今天,LizzieYzy作为一…...

C#中使用MiniExcel 快速入门:读写 .xlsx 文件
背景介绍 报表绕不开 Excel。传统方案用 Microsoft.Office.Interop,需要安装 Office,且进程管理复杂。MiniExcel 是一个轻量级库(< 1MB),通过直接操作 ZIP 压缩包(.xlsx 本质是 ZIP)实现读写…...

基于MCP协议的Claude对话历史管理工具:架构、配置与实战
1. 项目概述:一个为Claude桌面应用量身定制的历史记录管理工具如果你和我一样,是Claude桌面应用的深度用户,那你一定对那个内置的对话历史管理功能颇有微词。它太基础了,基础到几乎只能算是一个“查看器”。想按日期、按项目、按关…...

告别官网SDK的迷茫:手把手教你为MSP430f5529在CCS中搭建‘私人定制’开发环境
告别官网SDK的迷茫:手把手教你为MSP430f5529在CCS中搭建‘私人定制’开发环境 嵌入式开发者常陷入这样的困境:每次新建项目都要重复配置开发环境,不仅浪费时间,还容易因配置不一致导致各种奇怪的问题。对于MSP430f5529这样的经典型…...