osgPBR(十五)镜面IBL--查看不同级别的HDR环境贴图
首先,设置可以使用Mipmap,启用三线性过滤,设置最大级别和最小级别
osg::ref_ptr<osg::TextureCubeMap> tcm = new osg::TextureCubeMap;
tcm->setTextureSize(128, 128);tcm->setFilter(osg::Texture::MIN_FILTER, osg::Texture::LINEAR_MIPMAP_LINEAR);
tcm->setUseHardwareMipMapGeneration(true);
tcm->setMinLOD(0);
tcm->setMaxLOD(4 );
然后在shader中,用textureLod分别查看各个级别
“gl_FragColor = textureLod(tex0,dir,4);\n”//0,1,2,3,4
运行如下





代码如下:
#include <osg/TextureCubeMap>
#include <osg/TexGen>
#include <osg/TexEnvCombine>
#include <osgUtil/ReflectionMapGenerator>
#include <osgDB/ReadFile>
#include <osgViewer/Viewer>
#include <osg/NodeVisitor>
#include <osg/ShapeDrawable>
static const char * vertexShader =
{
“in vec3 aPos;\n”
“varying vec3 outPos;”
“void main(void)\n”
“{\n”
“outPos = aPos;\n”
" gl_Position = ftransform();\n"
“}\n”
};
static const char *psShader =
{
“varying vec3 outPos;”
“uniform samplerCube tex0;”
“void main(void)\n”
“{\n”
“float x = outPos.r;\n”
“float y = outPos.g;\n”
“float z = outPos.b;\n”
“vec3 dir = vec3(x,y,z);\n”
//“gl_FragColor = vec4(x,y,z,1);\n”
//“gl_FragColor = texture(tex0,dir);\n”
“gl_FragColor = textureLod(tex0,dir,2);\n”//0,1,2,3,4
“}\n”
};
class MyNodeVisitor : public osg::NodeVisitor
{
public:
MyNodeVisitor() : osg::NodeVisitor(osg::NodeVisitor::TRAVERSE_ALL_CHILDREN)
{
}
void apply(osg::Geode& geode)
{int count = geode.getNumDrawables();for (int i = 0; i < count; i++){osg::ref_ptr<osg::Geometry> geometry = geode.getDrawable(i)->asGeometry();if (!geometry.valid()){continue;}osg::Array* vertexArray = geometry->getVertexArray();geometry->setVertexAttribArray(1, vertexArray);}traverse(geode);
}
};
int main()
{
osg::ref_ptrosg::TextureCubeMap tcm = new osg::TextureCubeMap;
tcm->setTextureSize(128, 128);
tcm->setFilter(osg::Texture::MIN_FILTER, osg::Texture::LINEAR_MIPMAP_LINEAR);
tcm->setFilter(osg::Texture::MAG_FILTER, osg::Texture::LINEAR);
tcm->setWrap(osg::Texture::WRAP_S, osg::Texture::CLAMP_TO_EDGE);
tcm->setWrap(osg::Texture::WRAP_T, osg::Texture::CLAMP_TO_EDGE);
tcm->setWrap(osg::Texture::WRAP_R, osg::Texture::CLAMP_TO_EDGE);
std::string strImagePosX = "D:/hdr/Right face camera.bmp";
osg::ref_ptr<osg::Image> imagePosX = osgDB::readImageFile(strImagePosX);
tcm->setImage(osg::TextureCubeMap::POSITIVE_X, imagePosX);
std::string strImageNegX = "D:/hdr/Left face camera.bmp";
osg::ref_ptr<osg::Image> imageNegX = osgDB::readImageFile(strImageNegX);
tcm->setImage(osg::TextureCubeMap::NEGATIVE_X, imageNegX);std::string strImagePosY = "D:/hdr/Front face camera.bmp";;
osg::ref_ptr<osg::Image> imagePosY = osgDB::readImageFile(strImagePosY);
tcm->setImage(osg::TextureCubeMap::POSITIVE_Y, imagePosY);
std::string strImageNegY = "D:/hdr/Back face camera.bmp";;
osg::ref_ptr<osg::Image> imageNegY = osgDB::readImageFile(strImageNegY);
tcm->setImage(osg::TextureCubeMap::NEGATIVE_Y, imageNegY);std::string strImagePosZ = "D:/hdr/Top face camera.bmp";
osg::ref_ptr<osg::Image> imagePosZ = osgDB::readImageFile(strImagePosZ);
tcm->setImage(osg::TextureCubeMap::POSITIVE_Z, imagePosZ);std::string strImageNegZ = "D:/hdr/Bottom face camera.bmp";
osg::ref_ptr<osg::Image> imageNegZ = osgDB::readImageFile(strImageNegZ);
tcm->setImage(osg::TextureCubeMap::NEGATIVE_Z, imageNegZ);
tcm->setUseHardwareMipMapGeneration(true);
tcm->setMinLOD(0);
tcm->setMaxLOD(4);osg::ref_ptr<osg::Box> box = new osg::Box(osg::Vec3(0, 0, 0), 10);
osg::ref_ptr<osg::ShapeDrawable> drawable = new osg::ShapeDrawable(box);
osg::ref_ptr<osg::Geode> geode = new osg::Geode;
geode->addDrawable(drawable);
MyNodeVisitor nv;
geode->accept(nv);
osg::ref_ptr<osg::StateSet> stateset = geode->getOrCreateStateSet();
stateset->setTextureAttributeAndModes(0, tcm, osg::StateAttribute::OVERRIDE | osg::StateAttribute::ON);//shaderosg::ref_ptr<osg::Shader> vs1 = new osg::Shader(osg::Shader::VERTEX, vertexShader);
osg::ref_ptr<osg::Shader> ps1 = new osg::Shader(osg::Shader::FRAGMENT, psShader);
osg::ref_ptr<osg::Program> program1 = new osg::Program;
program1->addShader(vs1);
program1->addShader(ps1);
program1->addBindAttribLocation("aPos", 1);osg::ref_ptr<osg::Uniform> tex0Uniform = new osg::Uniform("tex0", 0);
stateset->addUniform(tex0Uniform);
stateset->setAttribute(program1, osg::StateAttribute::ON);osg::ref_ptr<osgViewer::Viewer> viewer = new osgViewer::Viewer;
viewer->setSceneData(geode);
viewer->realize();
return viewer->run();
}
相关文章:
osgPBR(十五)镜面IBL--查看不同级别的HDR环境贴图
首先,设置可以使用Mipmap,启用三线性过滤,设置最大级别和最小级别 osg::ref_ptr<osg::TextureCubeMap> tcm new osg::TextureCubeMap; tcm->setTextureSize(128, 128);tcm->setFilter(osg::Texture::MIN_FILTER, osg::Texture:…...

Docker的学习记录
Docker是一个被广泛使用的开源容器引擎,基于Go语言,遵从Apache2.0协议开源。 docker的三个概念:容器、镜像和仓库。 镜像(Image):镜像是Docker中的一个模板。通过 Docker镜像 来创建 Docker容器ÿ…...

Android Jetpack组件架构:ViewModel的原理
Android Jetpack组件架构:ViewModel的原理 导言 本篇文章是关于介绍ViewModel的,由于ViewModel的使用还是挺简单的,这里就不再介绍其的基本应用,我们主要来分析ViewModel的原理。 ViewModel的生命周期 众所周知,一般…...
学习笔记1.0)
数据分析(python)学习笔记1.0
《利用Python进行数据分析》(原书第2版) 《利用Python进行数据分析》(原书第2版) 《利用Python进行数据分析》(原书第2版) 社区和会议 除了网络搜索,科学、数据相关的Python邮件列表对于解决问题也非常有帮助。可以看看下列邮件列表: pydata:与数据分析和pandas相…...
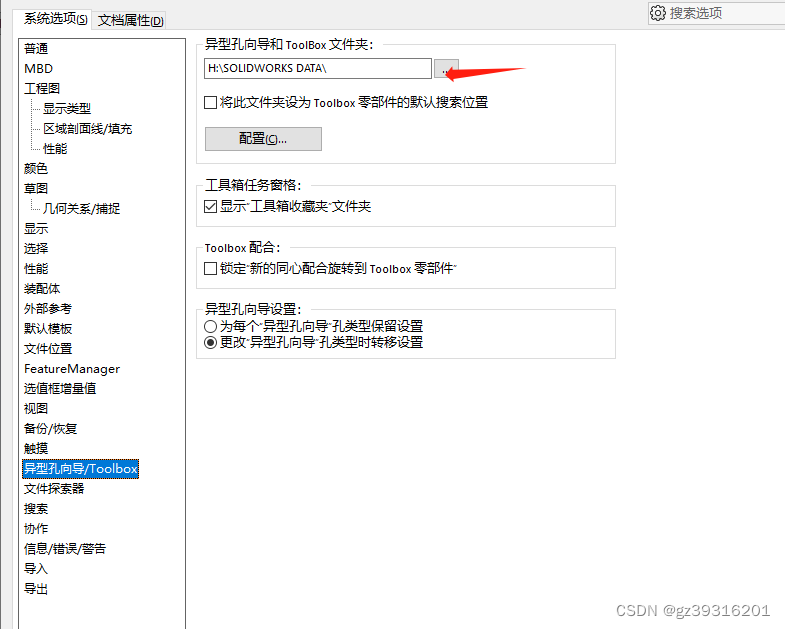
SW免安装的toolbox只读问题
把SOLIDWORKSDATA 整体复制到另外的目录,然后这里设置目录位置。不然原始位置有只读属性...
nodejs在pdf中绘制表格
需求 之前我已经了解过如何在pdf模板中填写字段了 nodejs根据pdf模板填入中文数据并生成新的pdf文件https://blog.csdn.net/ArmadaDK/article/details/132456324 但是当我具体使用的时候,我发现我的模板里面有表格,表格的长度是不固定的,所…...

使用不同尺寸的传感器拍照时,怎么保证拍出同样视场范围的照片?
1、问题背景 使用竞品机做图像效果对比时,我们通常都会要求拍摄的照片要视场范围一致,这样才具有可比性。之前我会考虑用同样焦距、同样分辨率的设备去拍照对比就可以了,觉得相机的视场范围只由镜头焦距来决定。 但如果对于不同尺寸的传感器…...
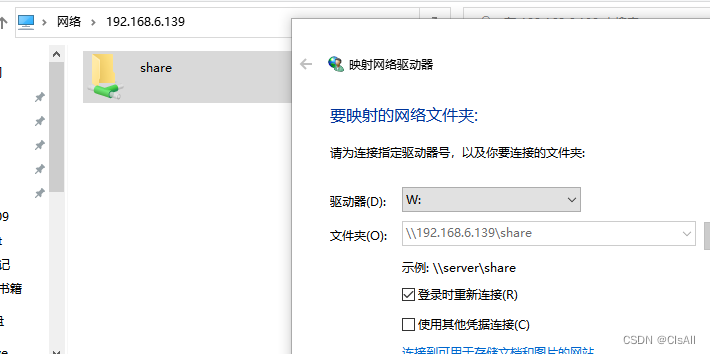
01-工具篇-windows与linux文件共享
一般来说绝大部分PC上装的系统均是windows,为了开发linux程序,会在PC上安装一个Vmware的虚拟机,在虚拟机上安装ubuntu18.04,由于windows上的代码查看软件、浏览器,通信软件更全,我们想只用ubuntu进行编译&a…...
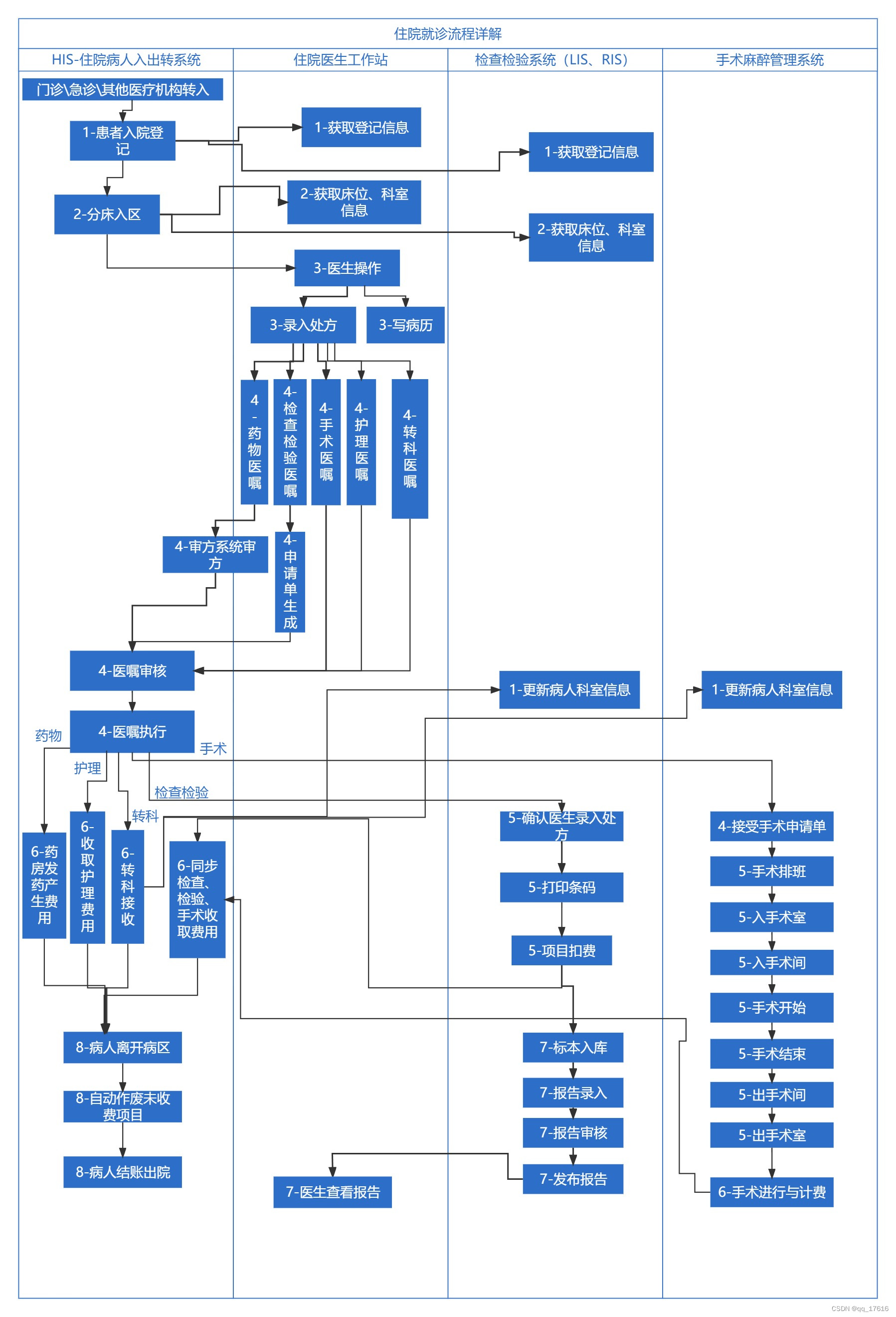
医疗实施-住院流程详解
住院就诊流程详解 1.病人入院登记2.病人进入病区3.医生操作病人4.医嘱录入与审核执行5. 医嘱收费前在对应业务系统的操作5.1.药物医嘱5.2.检查检验医嘱5.3.手术医嘱 6.住院医嘱费用的产生7. 医嘱收费后在对应业务系统的操作8. 病人出院 这篇文章是基于我的文章《医疗实施-住院就…...

本地连接服务器 jupyter notebook
本地连接服务器 jupyter notebook 一、前提工作二、服务器操作三、Windows 操作 一、前提工作 准备一台Linux云服务器新建一个用户,并切换到此用户安装 Anaconda 二、服务器操作 远程服务器上安装和配置 Jupyter Notebook: pip3 install jupyter接着…...
Android 使用Kotlin封装RecyclerView
文章目录 1.概述2.运行效果图3.代码实现3.1 扩展RecyclerView 3.2 扩展Adapter3.3 RecyclerView装饰绘制3.3.1 以图片实现分割线3.3.2 画网格线3.3.3空白的分割线3.3.4 不同方向上的分割线 3.4 使用方法 1.概述 在一个开源项目上看到了一个Android Kotlin版的RecyclerView封装…...
WPF 实现点击按钮跳转页面功能
方法1. 配置环境 首先添加prism依赖项,配置好所有文件。需要配置的有两个文件:App.xaml.cs和App.xaml App.xaml.cs using System.Data; using System.Linq; using System.Threading.Tasks; using System.Windows;namespace PrismDemo {/// <summa…...

关于http网络通信数据包封装的过程
当我们谈论网络通信时,数据在从源到目的地传输的过程中会通过多层网络协议。在每一层,都会添加一些头信息(和有时尾信息)来帮助处理和传输数据。这个过程被称为"封装"(Encapsulation)。简单来说&…...
关于RabbitMQ你了解多少?
关于RabbitMQ你了解多少? 文章目录 关于RabbitMQ你了解多少?基础篇同步和异步MQ技术选型介绍和安装数据隔离SpringAMQP快速入门Work queues交换机Fanout交换机Direct交换机Topic交换机 声明队列和交换机MQ消息转换器 高级篇消息可靠性问题发送者的可靠性…...

Vulkan-着色器及编译SPIR-V
1.着色器模块介绍 Vulkan着色器代码一定要用字节码格式,而不是人类可读的语法如GLSL和HLSL。这个字节码就是SPIR-V,设计用于Vulkan和OpenCL。这是一个可以用于编写图形和计算着色器的格式,但是我们主要关注的是Vulkan的图形管线。使用字节码格…...
从MVC到DDD,该如何下手重构?
作者:付政委 博客:bugstack.cn 沉淀、分享、成长,让自己和他人都能有所收获!😄 大家好,我是技术UP主小傅哥。多年的 DDD 应用,使我开了技术的眼界! MVC 旧工程腐化严重,…...

论文阅读:基于隐马尔可夫模型的蛋白质多序列比对方法研究
本文来自chatpaper Basic Information: • Title: Research on Protein Multiple Sequence Alignment Method Based on Hidden Markov Model (基于隐马尔可夫模型的蛋白质多序列比对方法研究) • Authors: Zhan Qing • Affiliation: Harbin Institute of Technology (哈尔滨工…...

Vim同时打开多个文件
分屏模式 在 Vim 中,可以同时打开多个文件并使用分屏模式来查看它们。以下是一些常见的方法和命令: 在启动 Vim 时打开多个文件 使用 -o 选项打开文件并水平分屏: vim -o file1.txt file2.txt使用 -O 选项打开文件并垂直分屏: v…...

SpringCloudStreamkafka接收jsonarray字符串失败
文章目录 场景现象问题处理 场景现象 kafka作为消息队列,作为前端设备数据到后端消费的渠道,也被多个不同微服务消费一个服务与前端边缘计算设备建立socket消息,接收实时交通事件推送,再将事件发送到kafka里面。此处使用的是Spri…...
面向对象特性分析大全集
面向对象特性分析 先进行专栏介绍 面向对象总析前提小知识分类浅析封装浅析继承浅析多态面向对象编程优点abc 核心思想实际应用总结 封装概念详解关键主要目的核心思想优点12 缺点12 Java代码实现封装特性 继承概念详解语法示例关键主要目的核心思想优点12 缺点12 Java代码实现…...

两级宽带反馈放大器设计与优化方法
1. 两级宽带反馈放大器设计概述在当今高速通信和信号处理系统中,宽带放大器作为关键模拟模块,其性能直接影响整个系统的信号完整性。传统的手工设计方法在面对现代SoC日益复杂的性能需求时显得力不从心,特别是在需要同时满足增益、带宽、噪声…...

Docker镜像标准化机器人开发环境:OpenClaw项目协作实践
1. 项目概述:一个面向协作开发的OpenClaw项目镜像最近在开源社区里,一个名为laolin5564/openclaw-collab-dev的Docker镜像引起了我的注意。这个镜像的名字本身就很有意思,它明确指向了“OpenClaw”和“协作开发”这两个核心概念。对于从事机器…...

开源与闭源软件质量对比:工程实践与激励机制才是关键
1. 开源与闭源软件质量之争:一场被误解的辩论最近和几位同行聊起软件质量的话题,不出所料,讨论很快又滑向了那个经典的对立:开源软件和闭源(或称专有)软件,到底谁的质量更好?场面一度…...
工具篇 · 一:3分钟学会yum,让软件安装像呼吸一样简单)
Re:Linux系统篇(九)工具篇 · 一:3分钟学会yum,让软件安装像呼吸一样简单
◆ 博主名称: 晓此方-CSDN博客 大家好,欢迎来到晓此方的博客。 ⭐️Linux系列个人专栏: 【主题曲】Linux ⭐️Re系列专栏:我们思考 (Rethink) 我们重建 (Rebuild) 我们记录 (Record) 文章目录概要&序論一、在 Linux 环境下…...

欧盟单一电信市场:技术规则重塑与产业影响分析
1. 项目概述:一场迟来的电信革命作为一名在通信行业摸爬滚打了十几年的工程师,我经历过从2G到5G的每一次技术迭代,也见证过不同市场间因政策壁垒而导致的种种怪象。比如,你带着一部手机在欧洲大陆旅行,从德国到法国不过…...

Agnix:为AI智能体打造安全可控的操作系统级执行环境
1. 项目概述:从“智能体”到“操作系统”的范式跃迁最近在开源社区里,一个名为agent-sh/agnix的项目引起了我的注意。乍一看这个名字,agent和agnix的组合,很容易让人联想到这是又一个基于大语言模型的智能体(Agent&…...

MegaParse:一站式文档解析库的设计原理与工程实践
1. 项目概述:从“MegaParse”看文档解析的“大”与“全”在信息爆炸的时代,我们每天都要处理海量的文档——PDF报告、Word合同、Excel表格、PPT演示稿,甚至网页截图和扫描件。对于开发者、数据分析师和知识管理从业者来说,如何将这…...

Ante语言:精化类型与生命周期推断在系统编程中的实践探索
1. 项目概述:Ante,一个探索系统编程新范式的语言 最近在关注系统级编程语言的发展,发现了一个很有意思的项目:Ante。这并非一个成熟的生产级工具,而更像是一个充满野心的“实验室”。它的核心目标,是尝试将…...

windows构建mamba环境
收集必要的whl文件 在某🐟等平台或者是精密搜索找到以下whl文件 对于3.10 python triton-2.0.0-cp310-cp310-win_amd64.whl causal_conv1d-1.1.1-cp310-cp310-win_amd64.whl mamba_ssm-1.1.3-cp310-cp310-win_amd64.whl 对于3.11 python FuouM/mamba-ssm-windo…...

抖音图片怎么去水印?2026实测免费去水印方法全盘点,这几款工具真好用
抖音图片怎么去水印?2026实测免费去水印方法全盘点,这几款工具真好用 刷抖音的时候,你有没有遇到过这种情况:看到一张超好看的图片,点保存,结果发现角落里多了一行「用户名」或者一个抖音 Logo,…...