NUWA论文阅读
论文链接:NUWA: Visual Synthesis Pre-training for Neural visUal World creAtion
文章目录
- 摘要
- 引言
- 相关工作
- 视觉自回归模型
- 视觉稀疏自注意
- 方法
- 3D数据表征
- 3D Nearby Self-Attention
- 3D编码器-解码器
- 训练目标
- 实验
- 实现细节
- 与SOTA比较
- T2I微调
- T2V微调
- V2V微调
- Sketch-to-Image (S2I) 微调
- Image Completion (I2I) zero-shot evaluation
- Text-Guided Image Manipulation (TI2I) zero-shot evaluation
- Sketch-to-Video (S2V) fine-tuning and Text-Guided Video Manipulation (TV2V) zero-shot evaluation
- 消融实验
- 结论
摘要
本文提出了一个统一的多模态预训练模型,称为NUWA,可以为各种视觉合成任务生成新的或操纵现有的视觉数据(即图像和视频)。为了在不同场景下同时覆盖语言、图像和视频,设计了一种3D Transformer编码器-解码器框架,该框架不仅可以将视频作为3D数据处理,还可以将文本和图像分别作为1D和2D数据处理。为了考虑视觉数据的性质,降低计算复杂度,提出了一种3D Nearby Attention(3DNA)机制。在8个下游任务上评估了N UWA。与几个强大的基线相比,NUWA在文本到图像生成、文本到视频生成、视频预测等方面取得了最先进的结果。此外,它还在文本引导的图像和视频处理任务上显示出令人惊讶的良好zero-shot能力。项目仓库是https://github.com/microsoft/NUWA。
引言
如今,网络的视觉化程度越来越高,图像和视频已经成为新的信息载体,并在许多实际应用中得到了应用。在此背景下,视觉合成成为一个越来越受欢迎的研究课题,其目的是为各种视觉场景构建能够生成新的或操纵现有视觉数据(即图像和视频)的模型。
自回归模型在视觉合成任务中发挥重要作用,因为与GANs相比,自回归模型具有明确的密度建模和稳定的训练优势。早期的视觉自回归模型,如PixelCNN、PixelRNN、Image Transformer、iGPT和Video Transformer,以“逐像素”的方式进行视觉合成。然而,由于其在高维视觉数据上的计算成本高,这种方法只能应用于低分辨率的图像或视频,并且难以扩大规模。
最近,随着VQ-VAE作为一种离散视觉标记方法的出现,高效大规模的预训练可以应用于图像(如DALL-E和CogView)和视频(如GODIVA)的视觉合成任务。尽管取得了巨大的成功,但这种解决方案仍然存在局限性——它们将图像和视频分开处理,并专注于生成其中任何一个。这限制了模型从图像和视频数据中获益。
本文提出了一个统一的多模态预训练模型NUWA,旨在支持图像和视频的视觉合成任务,并进行了8个下游视觉合成实验,如图1所示。这项工作的主要贡献有三个方面:
- 提出NUWA,一个通用的3D Transformer 编码器-解码器框架,它同时涵盖语言,图像和视频,用于不同的视觉合成任务。它由一个以文本或视觉草图为输入的自适应编码器和一个由8个视觉合成任务共享的解码器组成
- 在框架中提出了一个3D Nearby Attention(3DNA)机制,以考虑空间和时间轴的局域性特征。3DNA不仅降低了计算复杂度,而且提高了生成结果的视觉质量
- 与几个强大的基线相比,NUWA在文本到图像生成、文本到视频生成、视频预测等方面取得了最先进的结果。此外,NUWA不仅在文本引导的图像处理上,而且在文本引导的视频处理上都表现出令人惊讶的良好的zero-shot能力

相关工作
视觉自回归模型
本文提出的方法遵循了基于自回归模型的视觉综合研究思路。早期的视觉自回归模型以“逐像素”的方式进行视觉合成。然而,由于建模高维数据时计算成本高,这种方法只能应用于低分辨率的图像或视频,并且难以扩大规模。
最近,基于VQ-VAE的视觉自回归模型被提出用于视觉合成任务。通过将图像转换为离散的视觉标记,这些方法可以对文本到图像生成(如DALL-E和CogView)、文本到视频生成(如GODIVA)和视频预测(如LVT和VideoGPT)进行高效和大规模的预训练,生成的图像或视频的分辨率更高。然而,这些模型都没有由图像和视频一起训练。但是直观的是,这些任务可以从两种类型的视觉数据中受益。
与这些工作相比,NUWA是一个统一的自回归视觉合成模型,由覆盖图像和视频的视觉数据进行预训练,可以支持各种下游任务。本文验证了不同预训练任务的有效性。此外,在NUWA中使用VQ-GAN代替VQ-VAE进行视觉标记化,实验结果显示可以获得更好的生成质量。
视觉稀疏自注意
如何处理自注意力带来的平方的复杂度问题是另一个挑战,特别是对于高分辨率图像合成或视频合成这样的任务。
与NLP类似,稀疏注意机制已经被探索来缓解视觉合成的这个问题。Latent Video Transformer和Scaling Autoregressive Video Models将视觉数据分割成不同的部分(或块),然后对合成任务执行分块稀疏关注。然而,这些方法分别处理不同的块,并没有建模它们之间的关系。DALL-E、GODIVA提出在视觉合成任务中使用轴向稀疏注意力机制,即沿着视觉数据表示的轴线进行稀疏注意力计算。这种机制使得训练非常高效,并且对大规模预训练模型(如DALL-E、CogView和GODIVA)非常友好。然而,由于在自注意力中使用的有限上下文,可能会损害生成的视觉内容的质量。Generating Long Sequences with Sparse Transformers、Stand-Alone Self-Attention in Vision Models提出在视觉合成任务中使用局部稀疏注意力,这使得模型能够看到更多的上下文。但这些工作只用于图片领域。
与这些工作相比,NUWA提出了一种3D nearby attention,它扩展了局部稀疏注意,将两幅图像覆盖到视频中。本文中验证了在视觉生成中,局部稀疏注意优于轴向稀疏注意。
方法
3D数据表征
为了涵盖所有文本、图像和视频,将所有类型数据视为tokens,并定义一个统一的 3D 符号 X ∈ R h × w × s × d X ∈ R^{h×w×s×d} X∈Rh×w×s×d,其中 h h h和 w w w分别表示空间轴(高度和宽度)上的tokens数, s s s表示时间轴中的tokens数, d d d是每个token的维度。下文介绍如何得到不同模态的统一表示。
文本自然是离散的,遵循 Transformer,使用小写字节对编码 (BPE) 将它们标记化并将它们嵌入到 R 1 × 1 × s × d R^{1×1×s×d} R1×1×s×d 中。使用占位符 1,因为文本没有空间维度。
图像自然是连续的像素。输入高度为H、宽度W和通道C的原始图像 I ∈ R H × W × C I∈R^{H×W ×C} I∈RH×W×C,VQ-VAE训练一个可学习的码本,在原始连续像素和离散标记之间建立桥梁,由以下公式(1)、(2)表示:
z i ( l ) = arg min j ∣ ∣ E ( ( I ) i − B j ∣ ∣ 2 , (1) z_{i}^{(l)}=\underset{j}{\arg \min}||E((I)_{i}-B_{j}||^{2}, \tag{1} zi(l)=jargmin∣∣E((I)i−Bj∣∣2,(1)
I ^ = G ( B [ z ] ) , (2) \hat{I}=G(B[z]), \tag{2} I^=G(B[z]),(2)
其中 E E E是一个编码器,将 I I I编码为 h × w h×w h×w个网格特征 E ( I ) ∈ R h × w × d B E(I) \in R^{h×w×d_{B}} E(I)∈Rh×w×dB, B ∈ R N × d B B \in R^{N×d_{B}} B∈RN×dB是一个具有 N N N个视觉tokens的可学习码本, E ( I ) E(I) E(I)中的每个网格都是从 B B B中计算相似度找到最相近的token搜索而来。搜索的结果 z ∈ { 0 , 1 , . , N − 1 } h × w z ∈ \{0, 1,., N − 1\}^{h×w} z∈{0,1,.,N−1}h×w由 B B B嵌入并由解码器 G G G重构回 I ^ \hat{I} I^。VQ-VAE的训练损失可表示为公式 (3):

其中 ∣ ∣ I − I ^ ∣ ∣ 2 2 ||I-\hat{I}||^2_2 ∣∣I−I^∣∣22严格约束 I I I和 I ^ \hat{I} I^之间的精确像素匹配,限制了模型的泛化能力。最近,VQ-GAN通过添加感知损失和GAN损失来增强VQ-VAE训练,以缓解 I I I和 I ^ \hat{I} I^之间的精确约束,并专注于高级语义匹配,如公式(4) 、(5)所示:

经过VQ-GAN的训练,最终使用 B [ z ] ∈ R h × w × 1 × d B[z]∈R^{h×w×1×d} B[z]∈Rh×w×1×d作为图像的表示,使用占位符1,因为图像没有时间维度。
视频可以被视为图像的时间延伸,最近的作品如videopt和VideoGen将VQ-VAE编码器中的卷积从2D扩展到3D,并训练视频特定的表示。然而,这不能为图像和视频共享一个共同的代码本。本文证明了简单地使用二维VQ-GAN对视频的每帧进行编码也可以生成时间一致性视频,同时从图像和视频数据中受益。结果表示为 R h × w × s × d R^{h×w×s×d} Rh×w×s×d,其中 s s s表示帧数。
对于图像草图,将它们视为具有特殊通道的图像。一个图像分割矩阵 R H × W R^{H×W} RH×W,其中每个值表示像素的类的值可以以 one-hot 方式 R H × W × C R^{H×W ×C} RH×W×C查看,其中 C C C是分割类的数量。通过训练一个额外的VQ-GAN进行图像草图,最终得到嵌入的图像表示 R h × w × 1 × d R^{h×w×1×d} Rh×w×1×d。类似地,对于视频草图,表示是 R h × w × s × d R^{h×w×s×d} Rh×w×s×d。

3D Nearby Self-Attention
基于之前的 3D 数据表示定义了一个统一的 3D Nearby SelfAttention (3DNA) 模块,支持自注意力和交叉注意力。首先给出公式(6)中3DNA的定义,并在公式(7) ~(11)中引入详细的实现:
Y = 3 D N A ( X , C ; W ) , (6) Y=3DNA(X,C;W), \tag{6} Y=3DNA(X,C;W),(6)
其中 X ∈ R h × w × s × d i n X \in R^{h×w×s×d^{in}} X∈Rh×w×s×din和 C ∈ R h ′ × w ′ × s ′ × d i n C \in R^{h^{'}×w^{'}×s^{'}×d^{in}} C∈Rh′×w′×s′×din是3D数据表征。如果 C = X C = X C=X,3DNA表示对目标 X X X的自注意力计算,如果 C ≠ X C≠X C=X,3DNA是目标 X X X在条件 C C C下的交叉注意力计算。 W W W表示可学习矩阵。从 X X X下的坐标 ( i , j , k ) (i, j, k) (i,j,k)开始引入 3DNA。通过一个线性映射,在条件 C C C下对应的坐标 ( i ′ , j ′ , k ′ ) (i^{'},j^{'},k^{'}) (i′,j′,k′)是 ( ⌊ i h ′ h ⌋ , ⌊ j w ′ w ⌋ , ⌊ k s ′ s ⌋ ) (\lfloor i\frac{h^{'}}{h} \rfloor,\lfloor j\frac{w^{'}}{w} \rfloor,\lfloor k\frac{s^{'}}{s} \rfloor) (⌊ihh′⌋,⌊jww′⌋,⌊kss′⌋)。然后,以 ( i ′ , j ′ , k ′ ) (i^{'},j^{'},k^{'}) (i′,j′,k′)为中心,宽度,高度,时间范围为 e w , e h , e s ∈ R + e^w, e^h, e^s∈R^+ ew,eh,es∈R+的局部邻域定义如公式(7)所示:

其中 N i , j , k ∈ R e h × e w × e s × d i n N^{i,j,k} \in R^{e^h×e^w×e^s×d^{in}} Ni,j,k∈Reh×ew×es×din是条件 C C C的子张量,由 ( i , j , k ) (i, j, k) (i,j,k)需要关注的相应附近信息组成。伴随三个可学习权值 W Q 、 W K 、 W V ∈ R d i n × d o u t W^Q、W^K、W^V∈R^{d^{in} ×d^{out}} WQ、WK、WV∈Rdin×dout,位置 ( i , j , k ) (i, j, k) (i,j,k)的输出张量如公式(8) ~(11)所示:

其中 ( i , j , k ) (i, j, k) (i,j,k)位置查询并收集 C C C中对应的附近信息。此也能处理 C = X C =X C=X的情况, ( i , j , k ) (i, j, k) (i,j,k)只查询自身附近的位置。3NDA不仅将完全注意的复杂度从 O ( ( h w s ) 2 ) O((hws)^2) O((hws)2)降低到 O ( ( h w s ) ( e h e w e s ) ) O ((hws) (e^he^we^s)) O((hws)(ehewes)),而且表现出了优越的性能。
3D编码器-解码器
基于 3DNA 构建 3D 编码-解码器。为了在 C ∈ R h ′ × w ′ × s ′ × d i n C ∈ R^{h^′ ×w^′ ×s^′ ×d^{in}} C∈Rh′×w′×s′×din的条件下生成目标 Y ∈ R h × w × s × d o u t Y ∈ R^{h×w×s×d^{out}} Y∈Rh×w×s×dout, Y Y Y和 C C C的位置编码由三个不同的可学习词汇表更新,分别考虑高度、宽度和时间轴,如公式(12)、(13)所示:

然后,将条件 C C C输入到一个编码器中,该编码器具有 L L L个3DNA层的堆栈,以对自注意相互作用进行建模,第 l l l层如公式(14)所示:

同样,解码器也由 L L L个3DNA 层的堆叠而成。解码器在生成结果上计算自注意力,在生成结果和条件之间的计算交叉注意力。第 l l l层计算如公式(15)所示:

其中 < i , < j , < k < i, < j, < k <i,<j,<k表示当前生成的tokens。初始令牌 V 0 , 0 , 0 ( 1 ) V^{(1)}_{0,0,0} V0,0,0(1)是在训练阶段学习的特殊 < b o s > < bos > <bos>token。
训练目标
在文本到图像 (T2I)、视频预测 (V2V) 和文本到视频 (T2V) 三个任务上训练模型。三个任务的训练目标是交叉熵,分别在公式(16)中表示为三个部分所示:

对于T2I和T2V任务, C t e x t C^{text} Ctext表示文本条件。对于V2V任务,由于没有文本输入,改为获得特殊单词“None”的恒定 3D 表示 c c c。 θ θ θ为模型参数。
实验
首先在三个数据集上对NUWA进行预训练:用于文本到图像(T2I)生成的Conceptual Captions数据集,包括290万文本到图像对;用于视频预测(V2V)的Moments in Time数据集,包括727K条视频;用于文本到视频(T2V)生成的VATEX数据集,包括241K条文本到视频对。
实现细节
按前文介绍设置文本、图像和视频的3D表示的大小,如下所示。对于文本,3D表示的大小为 1 × 1 × 77 × 1280 1 × 1 × 77 × 1280 1×1×77×1280。对于图像,三维表示的尺寸为 21 × 21 × 1 × 1280 21 × 21 × 1 × 1280 21×21×1×1280。对于视频,3D表示的大小为 21 × 21 × 10 × 1280 21 × 21 × 10 × 1280 21×21×10×1280,从2.5 fps的视频中采样10帧。尽管默认的视觉分辨率为 336 × 336 336 × 336 336×336,但对不同的分辨率进行预训练,以便与现有模型进行比较。对于图像和视频的VQ-GAN模型,公式(1)中网格特征 E ( I ) E(I) E(I)的大小为 441 × 256 441 × 256 441×256,码本 B B B的大小为 12 , 288 12,288 12,288。
不同的稀疏程度用于不同的模态。对于文本,设置 ( e w , e h , e s ) = ( 1 , 1 , ∞ ) (e^w, e^h, e^s) = (1, 1, ∞) (ew,eh,es)=(1,1,∞),其中 ∞ ∞ ∞表示全文始终用于注意力。对于图像和图像草图, ( e w , e h , e s ) = ( 3 , 3 , 1 ) (e^w, e^h, e^s) = (3, 3, 1) (ew,eh,es)=(3,3,1)。对于视频和视频草图, ( e w , e h , e s ) = ( 3 , 3 , 3 ) (e^w, e^h, e^s) = (3, 3, 3) (ew,eh,es)=(3,3,3)。
在 64 个 A100 GPU 上预训练两周,公式(14)中的层 L L L设置为24,使用Adam优化器,学习率为 1 e − 3 1e-3 1e−3,批量大小为128,预热 5% ,总共 50M 步。最终的预训练模型共有 870M 参数。
与SOTA比较
T2I微调
对MSCOCO数据集上的NUWA进行了定量比较(见表1),定性比较(见图3)。遵循DALL-E设置,分别使用模糊FID评分(FID-k)和Inception score (IS)来评估质量和多样性;同时按照GODIVA,使用CLIPSIM指标,该指标结合了CLIP模型来计算输入文本与生成图像之间的语义相似度。为了公平比较,所有模型都使用 256 × 256 256 × 256 256×256的分辨率。为每个文本生成60幅图像,并通过CLIP选择最佳图像。表1中,NUWA显著优于CogView,其FID-0为12.9,CLIPSIM为0.3429。尽管XMC-GAN报告了9.3的显著FID分数,但本文发现与XMC-GAN论文中完全相同的样本相比,NUWA生成的图像更真实(见图3)。特别是在最后一个例子中,男孩的脸部清晰,气球也正确生成。


T2V微调
在Kinetics数据集上对NUWA进行了定量比较(见表2),定性比较(见图4)。遵循TFGAN,使用FID-img和FID-vid指标上评估视觉质量,在生成视频的标签准确性上评估语义一致性。如表2所示,NUWA在上述所有指标上都达到了最佳性能。图4展示了基于未见文本“playing golf at swimming pool”或“running on the sea”等生成视频的强大zero-shot能力。

V2V微调
在表3中定量比较了BAIR Robot Pushing数据集上的NUWA。Cond.表示预测未来帧的帧数。为了公平比较,所有模型都使用 64 × 64 64×64 64×64分辨率。尽管只给出一帧作为条件(Cond.),但NUWA仍然显著地将最先进的FVD分数从94±2推到86.9。

Sketch-to-Image (S2I) 微调
图5中定性地比较了MSCOCO stuff上的NUWA。与Taming-Transformers和SPADE相比,NUWA生成了各种各样的真实巴士,即使是公共汽车窗口的反射也清晰可见。

Image Completion (I2I) zero-shot evaluation
在图6中以zero-shot的方式对NUWA进行定性比较。给定塔的上半部分图片,与Taming Transformers相比,NUWA对塔的下半部分表现出了更丰富的想象,包括建筑、湖泊、花、草、树、山等。

Text-Guided Image Manipulation (TI2I) zero-shot evaluation
在图7中以zero-shot的方式对NUWA进行了定性比较。与Paint By Word相比,NUWA显示出强大的操作能力,在不改变图像其他部分的情况下,生成高质量的与文本一致性高的结果。例如,在第三排,由NUWA生成的蓝色消防车更加逼真,而后面的建筑则没有变化。这得益于对各种视觉任务的多任务预训练所学习到的真实世界的视觉模式。另一个优势是NUWA的推理速度,几乎50秒生成图像,而Paint By Words在推理过程中需要额外的训练,大约需要300秒才能收敛。

Sketch-to-Video (S2V) fine-tuning and Text-Guided Video Manipulation (TV2V) zero-shot evaluation
开放域S2V和TV2V是本文首次提出的任务。由于没有比较,将在消融研究中讨论。录中提供了更详细的比较,包括人工评估的样本。
消融实验
表4的上述部分显示了不同VQ-VAE (VQ-GAN)设置的有效性。在ImageNet和OpenImages上进行了实验。 R R R表示原始分辨率, D D D表示离散标记的数量。压缩率记作 F x F_x Fx,其中 x x x是 R \sqrt{R} R除以 D \sqrt{D} D的商。比较表4的前两行,VQ-GAN显示出明显优于VQ-VAE的初始化距离(FID)和结构相似矩阵(SSIM)得分。比较第2-3行,发现离散tokens的数量是导致更高视觉质量的关键因素,而不是压缩率。虽然第2行和第4行具有相同的压缩率F16,但它们的FID评分不同,分别为6.04和4.79。因此,重要的不仅是对原始图像进行了多少压缩,还包括使用了多少离散的tokens来表示图像。这符合认知逻辑,用一个token来表示人脸太模糊了。实际上,发现162个离散的tokens通常会导致较差的性能,特别是对于人脸,而322个标记表现出最佳性能。然而,更多的离散tokens意味着更多的计算,特别是对于视频。最终在预训练中使用了一个折衷方法:212个令牌。通过在Open Images数据集上的训练,进一步将212版本的FID分数从4.79提高到4.31。

表4的下一部分显示了草图VQGAN的性能。MSCOCO上的VQ-GAN-Seg训练用于素描到图像(S2I)任务,VQ-GAN-Seg训练用于VSPW上的VQ-GAN-Seg训练用于素描到视频(S2V)任务。所有骨干网络在像素精度(PA)和频率加权交联(FWIoU)方面都表现出良好的性能,这表本文模型中使用的3D草图表示质量很好。图8还显示了 336 × 336 336×336 336×336图像和草图的一些重构样本。

表5显示了文本到视频(T2V)生成任务的多任务预训练效果。本文研究了一个具有挑战性的数据集,MSR-VTT,具有自然描述和真实世界的视频。与只训练单一T2V任务(第1行)相比,同时训练T2V和T2I任务(第2行)将CLIPSIM从0.2314提高到0.2379。这是因为T2I有助于在文本和图像之间建立联系,从而有助于T2V任务的语义一致性。相比之下,T2V和V2V(第3行)的训练使FVD得分从52.98提高到51.81。这是因为V2V有助于学习一种常见的无条件视频模式,因此有助于T2V任务的视觉质量。作为NUWA的默认设置,在所有三个任务上进行训练可以达到最佳性能。

表6显示了在VSPW数据集上,3D Nearby Attention对Sketch-to-Video (S2V)任务的有效性。本文之所以研究S2V任务,是因为该任务的编码器和解码器都输入了3D视频数据。为了评估S2V的语义一致性,提出了一种名为Detected PA的新度量,它使用语义分割模型对生成的视频的每一帧进行分割,然后计算生成的片段与输入视频草图之间的像素精度。最后一行的默认NUWA设置,nearby编码器和nearby解码器,可以实现最佳的FID-vid和检测到的PA。如果将编码器或解码器中的任何一个替换为full attention,则性能会下降,这表明关注附近的条件和附近生成的结果比简单地考虑所有信息要好。在两层比较了邻近稀疏和轴向稀疏。首先,邻近稀疏的计算复杂度为 O ( ( h w s ) ( e h e w e s ) ) O ((hws) (e^he^we^s)) O((hws)(ehewes)),轴对称稀疏注意力为 O ( ( h w s ) ( h + w + s ) ) O ((hws) (h + w + s)) O((hws)(h+w+s))。对于生成长视频(更大的视频),nearby-sparse算法的计算效率更高。其次,在视觉生成任务中,邻近稀疏比轴稀疏具有更好的性能,这是因为邻近稀疏关注包含空间轴和时间轴相互作用的“nearby”位置,而轴稀疏则单独处理不同轴,只考虑同一轴上的相互作用。

图9显示了本文提出的一个新任务,称之为“文本引导视频操作(TV2V)”。TV2V的目标是改变一个视频的未来,从一个选定的帧开始,以文本为指导。所有的采样从第二帧开始改变视频的未来。第一行显示的是原始视频帧,一个潜水员在水里游泳。将“The diver is swimming to the surface”输入到NUWA的编码器中,并提供第一视频帧后,NUWA成功生成了第二行潜水员向水面游去的视频。第三行显示了另一个成功的样本,让潜水员游到底部。如果想让潜水员飞向天空呢?第四行显示,NUWA也可以做到,潜水员像火箭一样向上飞行。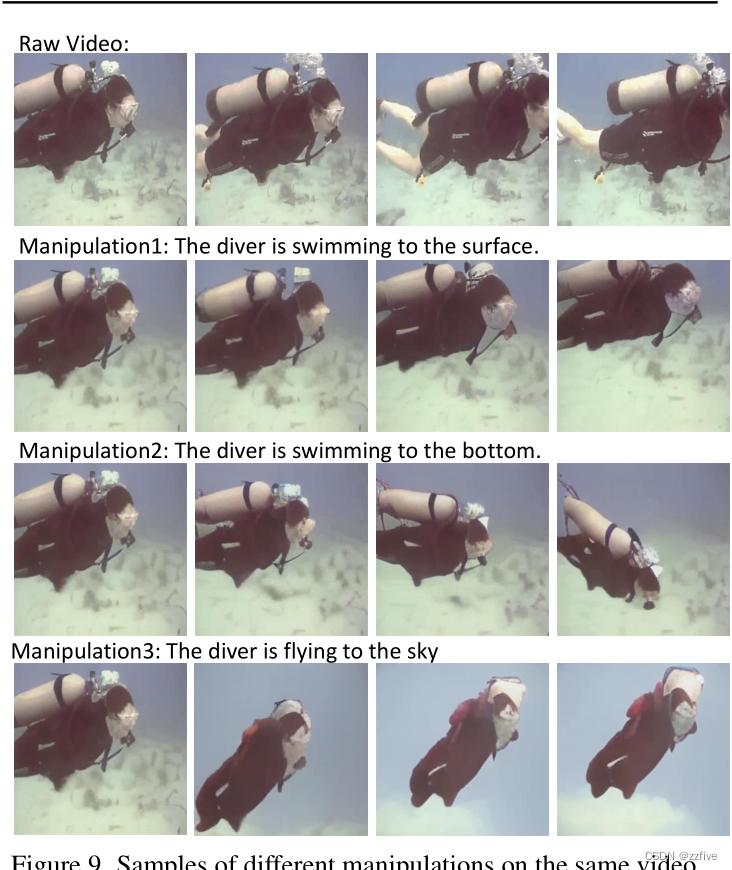
结论
本文提出NUWA作为一个统一的预训练模型,可以为8个视觉合成任务生成新的或操纵现有的图像和视频。这里做出了一些贡献,包括:
- 同时覆盖文本,图像和视频的通用3D编码器/解码器框架
- 考虑了空间轴和时间轴的邻近特征的邻近-稀疏注意机制
- 8项综合任务的综合实验
相关文章:
NUWA论文阅读
论文链接:NUWA: Visual Synthesis Pre-training for Neural visUal World creAtion 文章目录 摘要引言相关工作视觉自回归模型视觉稀疏自注意 方法3D数据表征3D Nearby Self-Attention3D编码器-解码器训练目标 实验实现细节与SOTA比较T2I微调T2V微调V2V微调Sketch-t…...
4.Tensors For Beginners-Vector Definition
在上一节,已经了解了前向和后向转换。 什么是向量? 定义1:向量是一个数字列表 这很简洁,也通俗易懂。 现有两个向量: 如果要把这两个向量给加起来,只需把对应位置的元素(组件)给加起来。 而要缩放向量&…...
vertx学习总结5
这章我们讲回调,英文名:Beyond callbacks 一、章节覆盖: 回调函数及其限制,如网关/边缘服务示例所示 未来和承诺——链接异步操作的简单模型 响应式扩展——一个更强大的模型,特别适合组合异步事件流 Kotlin协程——…...

Go,从命名开始!Go的关键字和标识符全列表手册和代码示例!
目录 一、Go的关键字列表和分类介绍关键字在Go中的定位语言的基石简洁与高效可扩展性和灵活性 关键字分类声明各种代码元素组合类型的字面表示基本流程控制语法协程和延迟函数调用 二、Go的关键字全代码示例关键字全代码示例 三、Go的标识符定义基础定义特殊规定关键字与标识符…...
【网络】网络扫盲篇 ——用简单语言和图解带你入门网络
网络的一些名词和基础知识讲解 前言正式开始一些基础知识发展背景运营商和生产商 协议协议的分层TCP/IP五层(或四层)模型(可以不看,对新手来说太痛苦了,我这里只是为了让屏幕前的你过一遍就好,里面很多概念新手是不太懂的…...
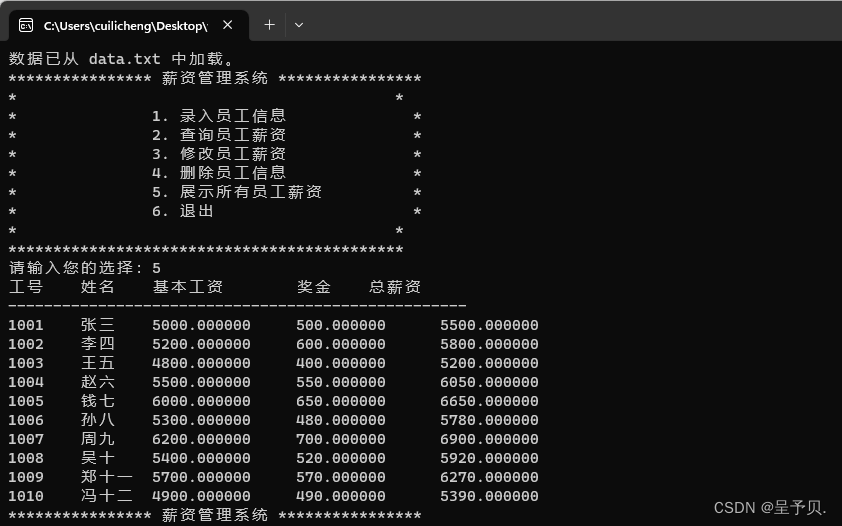
【项目开发 | C语言项目 | C语言薪资管理系统】
本项目是一个简单的薪资管理系统,旨在为用户提供方便的员工薪资管理功能,如添加、查询、修改、删除员工薪资信息等。系统通过命令行交互界面与用户进行交互,并使用 txt 文件存储员工数据。 一,开发环境需求 操作系统:w…...
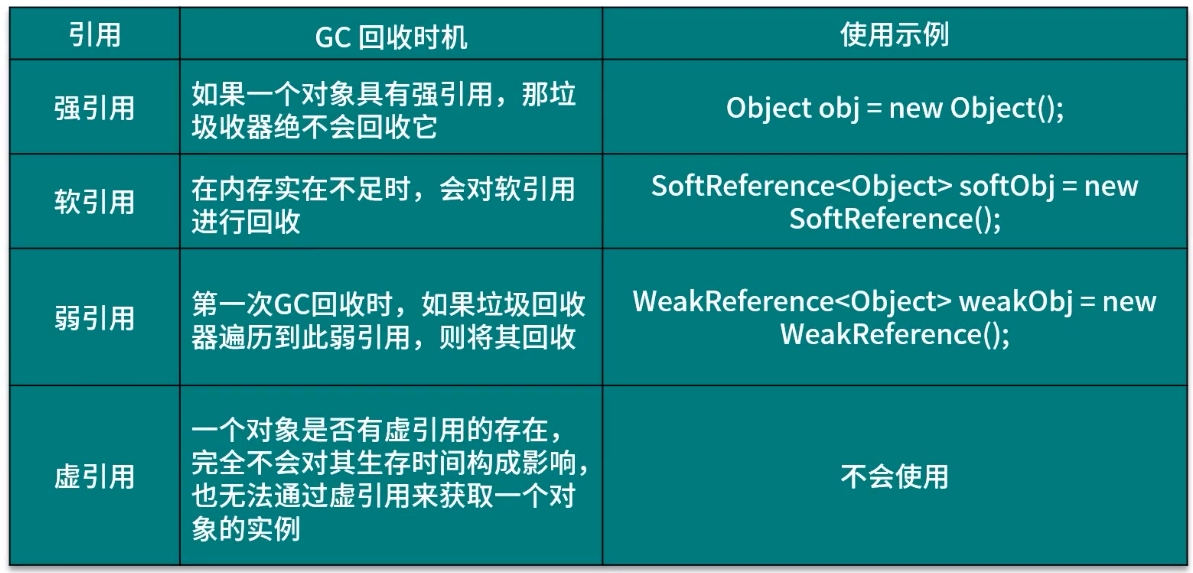
Android---GC回收机制与分代回收策略
目录 GC 回收机制 垃圾回收(Garbage Collection, GC) 垃圾回收算法 JVM 分代回收策略 1. 新生代 2. 老年代 GC Log 分析 引用 GC 回收机制 垃圾回收(Garbage Collection, GC) 垃圾就是内存中已经没有用的对象,JVM 中的垃圾回收器(Garbage Collector)会自…...
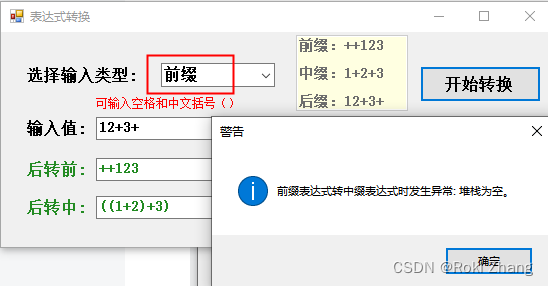
前缀、中缀、后缀表达式相互转换工具
目录 1. 界面一览 2. 使用说明 3. 实例演示 3.1 输入中缀 3.2 输入前缀 3.3 输入后缀 3.4 选择错误的类型 4. 代码 5. 资源地址 关于什么是前缀、中缀、后缀表达式,相信你不知道这个东西,那你也不会点进来这篇博客,当然,…...
Vue之ElementUI之动态树+数据表格+分页(项目功能)
目录 前言 一、实现动态树形菜单 1. 配置相应路径 2. 创建组件 3. 配置组件与路由的关系 index.js 4. 编写动态树形菜单 5. 页面效果演示 二、实现数据表格绑定及分页功能 1. 配置相应路径 2. 编写数据表格显示及分页功能代码 BookList.vue 3. 演示效果 总结 前言…...
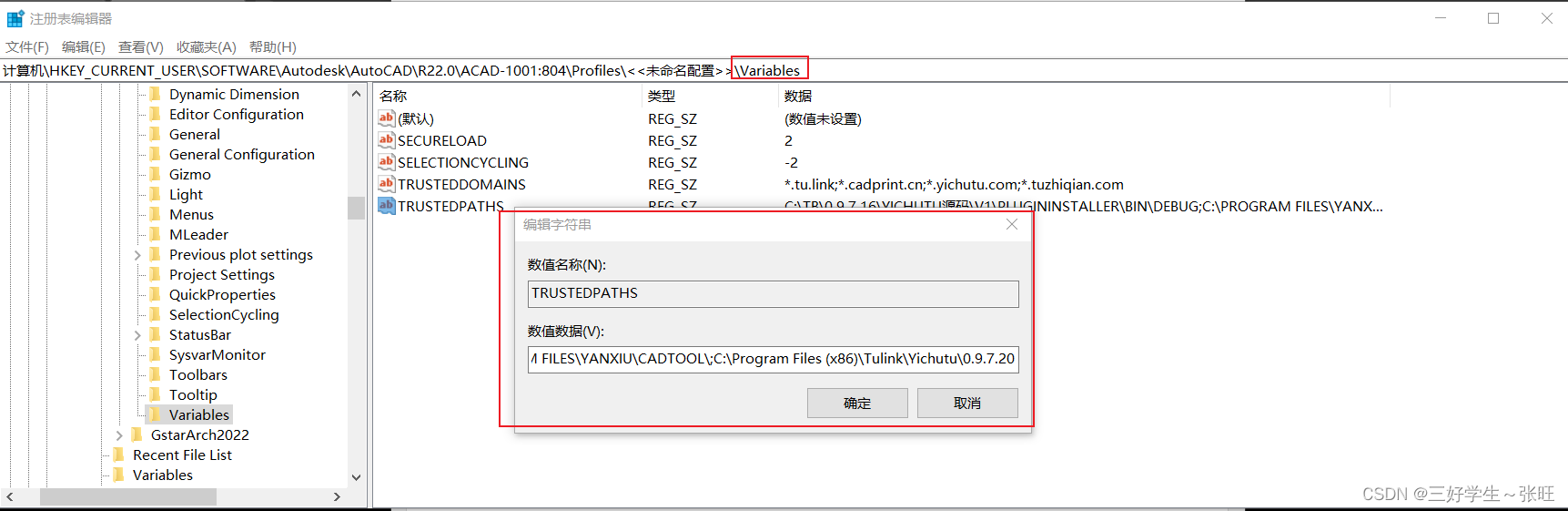
【CAD二次开发】给CAD添加TRUSTEDPATHS避免dll插件信任弹窗
找到配置文件目录,遍历下面的每个配置文件; 找到 Variables 下的TRUSTEDPATHS项目;在后面添加新的目录即可,多个目录使用分号分隔; public static void AddPath(string trusedPath){// 指定注册表键的路径...

编译和链接
编译和链接 一:???二:翻译环境1:编译1:预处理2:编译 2:链接 三:运行环境: 本文章所使用的图片均来在yyds鹏哥一:?…...
常识判断 --- 科技常识
目录 力与热 光和声 航空成就 垃圾分类 百科知识 血型 二十四节气歌 春雨惊春清谷天 夏满忙夏暑相连 秋处露秋寒霜降 冬雪雪冬小大寒 力与热 光和声 航空成就 垃圾分类 百科知识 血型...
修改npm全局安装的插件(下载目录指向)
我们先打开终端 然后执行 npm config get prefix查看npm 的下载地址 一般都会在C盘 但是 我们都知道 C盘下东西多了是很不好的 所以 我们可以执行 npm config set prefix “E:\npmfile”将 npm 的下载地址 改变成 E盘下的 npmfile目录 这样 以后 默认全局安装的插件就会都到…...

<C++> 异常
C语言传统的处理错误的方式 传统的错误处理机制: 终止程序,如assert,缺陷:用户难以接受。如发生内存错误,除0错误时就会终止程序。返回错误码,缺陷:需要程序员自己去查找对应的错误。如系统的…...

聊聊HttpClientBuilder
序 本文主要研究一下HttpClientBuilder HttpClientBuilder httpclient-4.5.10-sources.jar!/org/apache/http/impl/client/HttpClientBuilder.java public class HttpClientBuilder {public static HttpClientBuilder create() {return new HttpClientBuilder();}protected…...
MacOS - Sonoma更新了啥
1 系统介绍 苹果公司于2023年9月26日发布了macOS Sonoma 14.0正式版。名称由来不知道,可能是地名:Sonoma是一个地名,指加利福尼亚州北部索诺玛县(Sonoma County)。 2 系统重要更新 2.1 将小组件添加到桌面 速览提醒事项和临近日程等。按住Control键点…...
C++17中头文件filesystem的使用
C17引入了std::filesystem库(文件系统库, filesystem library),相关类及函数的声明在头文件filesystem中,命名空间为std::filesystem。 1.path类:文件路径相关操作,如指定的路径是否存在等,其介绍参见:http…...

「专题速递」数字人直播带货、传统行业数字化升级、远程协作中的低延时视频、地产物业中的通讯终端...
音视频技术作为企业数字化转型的核心要素之一,已在各行各业展现出广泛的应用和卓越的价值。实时通信、社交互动、高清视频等技术不仅令传统行业焕发新生,还为其在生产、管理、服务提供与维护等各个领域带来了巨大的助力,实现了生产效率和服务…...
PE格式之PE头部
1. PE头部总体组成 2. DOS MZ头 3. PE头 PE头由3部分组成: 下面分别: OptionalHeader比较大: 然后是节表, 节表有多个: PE文件头部就结束了, 最后就是节区了, 来看几段代码: ; main.asm .586 .model flat, stdcall option casemap:noneinclude windows.inc include ke…...

SLAM从入门到精通(用python实现机器人运动控制)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 在ROS下面,开发的方法很多,可以是c,可以是python。大部分接口操作类的应用,其实都可以用python来开…...

Data Storage and Computation
Data Storage and Computation 数据存储与计算假设一张表有 3 个字段:id BIGINT(8 字节 / 条) name VARCHAR(20)(实际平均 10 字节 / 条) age TINYINT(1 字节 / 条)单行实际数据占用࿱…...

告别开发板:用QEMU+STM32虚拟环境,零成本开启你的ARM Cortex-M汇编学习之旅
零成本构建ARM Cortex-M开发环境:QEMU模拟STM32实战指南 为什么选择虚拟化环境学习嵌入式开发? 记得第一次接触嵌入式开发时,面对琳琅满目的开发板和动辄上千元的调试器,作为学生的我一度望而却步。直到发现了QEMU这个开源神器&…...

从相关性反馈到视觉理解:计算机视觉检索技术的演进与落地
1. 从“荒谬”到“范式转移”:一位计算机视觉先驱的二十年跋涉1995年,当互联网还处于襁褓之中,用技术自动搜索图片的想法听起来近乎“荒谬”。这是微软亚洲研究院副院长、首席研究员芮勇博士在回顾自己研究生涯起点时的感慨。二十多年后&…...

高速PCB设计:信号完整性与电磁场思维实战解析
1. 高速PCB设计的核心挑战与设计思维转变十年前我刚接触高速PCB设计时,曾天真地认为只要把线连通就能工作。直到某次设计的DDR3内存模块在800MHz频率下频繁出错,才真正理解到:当信号上升时间进入亚纳秒级,PCB上的每毫米走线都成为…...

硬件工程师必读:九大核心算法如何重塑芯片与系统设计
1. 项目概述:一次关于算法之美的深度阅读作为一名在电子工程和数字设计领域摸爬滚打了十几年的工程师,我的日常工作就是和FPGA、ASIC、各种EDA工具以及层出不穷的硬件描述语言打交道。我们这行,天天谈的是时序收敛、功耗优化、面积利用&#…...

7个HTTP API分离关注点设计技巧:从理论到实战指南
7个HTTP API分离关注点设计技巧:从理论到实战指南 【免费下载链接】http-api-design HTTP API design guide extracted from work on the Heroku Platform API 项目地址: https://gitcode.com/gh_mirrors/ht/http-api-design 在API开发中,分离关注…...

终极开源语音AI工具包:Sherpa-Onnx一站式解决方案
终极开源语音AI工具包:Sherpa-Onnx一站式解决方案 【免费下载链接】sherpa-onnx Speech-to-text, text-to-speech, speaker diarization, speech enhancement, source separation, and VAD using next-gen Kaldi with onnxruntime without Internet connection. Sup…...

孤舟笔记 IO 与网络编程篇五 网络编程你真的懂吗?从Socket到TCP连接全解析
文章目录一、先说结论:网络编程核心事实二、TCP 编程:三次握手的 Socket 视角三、UDP 编程:无连接的数据报四、服务端线程模型演进模型一:一连接一线程(最原始)模型二:线程池(改进&a…...

3步完成微信聊天记录永久备份:开源工具WeChatExporter终极指南
3步完成微信聊天记录永久备份:开源工具WeChatExporter终极指南 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter WeChatExporter是一款专为Mac用户设计的开源工…...

Windows系统mfc140.dll文件丢失无法启动程序解决
在使用电脑系统时经常会出现丢失找不到某些文件的情况,由于很多常用软件都是采用 Microsoft Visual Studio 编写的,所以这类软件的运行需要依赖微软Visual C运行库,比如像 QQ、迅雷、Adobe 软件等等,如果没有安装VC运行库或者安装…...