计算机竞赛 深度学习机器视觉车道线识别与检测 -自动驾驶
文章目录
- 1 前言
- 2 先上成果
- 3 车道线
- 4 问题抽象(建立模型)
- 5 帧掩码(Frame Mask)
- 6 车道检测的图像预处理
- 7 图像阈值化
- 8 霍夫线变换
- 9 实现车道检测
- 9.1 帧掩码创建
- 9.2 图像预处理
- 9.2.1 图像阈值化
- 9.2.2 霍夫线变换
- 最后
1 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 机器视觉 深度学习 车道线检测 - opencv
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 车道线
理解车道检测的概念
那么什么是车道检测?以下是百度百科对车道的定义:
车道,又称行车线、车行道,是用在供车辆行经的道路。在一般公路和高速公路都有设置,高速公路对车道使用带有法律上的规则,例如行车道和超车道。

对其进行定义是很重要的,因为它使我们能够继续进行车道检测概念。我们在建立一个系统时不能有任何含糊不清的地方。
正如我前面提到的,车道检测是自动驾驶汽车和自动驾驶汽车的关键组成部分。这是驾驶场景理解的重要研究课题之一。一旦获得车道位置,车辆就知道去哪里,并避免撞上其他车道或离开道路。这样可以防止驾驶员/车辆系统偏离车道。
以下是一些随机道路图像(第一行)及其检测到的车道(第二行):
4 问题抽象(建立模型)
我们希望执行的任务是实时检测视频中的车道。我们可以通过多种方式进行车道检测。我们可以使用基于学习的方法,例如在带注释的视频数据集上训练深度学习模型,或者使用预训练好的模型。
然而,也有更简单的方法来执行车道检测。在这里,学长将向你展示如何在不使用任何深入学习模型的情况下完成此任务。
下面是将要处理的视频的一个帧:
正如我们在这张图片中看到的,我们有四条车道被白色的车道标线隔开。所以,要检测车道,我们必须检测车道两边的白色标记。这就引出了一个关键问题——我们如何检测车道标线?
除了车道标线之外,场景中还有许多其他对象。道路上有车辆、路侧护栏、路灯等,在视频中,每一帧都会有场景变化。这很好地反映了真实的驾驶情况。
因此,在解决车道检测问题之前,我们必须找到一种方法来忽略驾驶场景中不需要的对象。
我们现在能做的一件事就是缩小感兴趣的领域。与其使用整个帧,不如只使用帧的一部分。在下面的图像中,除了车道的标记之外,其他所有内容都隐藏了。当车辆移动时,车道标线将或多或少地落在该区域内:

5 帧掩码(Frame Mask)
帧掩码只是一个NumPy数组。
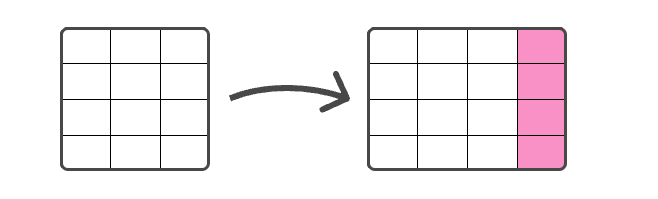
当我们想对图像应用掩码时,只需将图像中所需区域的像素值更改为0、255或任何其他数字。
下面给出了一个图像掩蔽的例子。图像中某个区域的像素值已设置为0:

这是一种非常简单但有效的从图像中去除不需要的区域和对象的方法。
6 车道检测的图像预处理
我们将首先对输入视频中的所有帧应用掩码。
然后,我们将应用图像阈值化和霍夫线变换来检测车道标线。
7 图像阈值化
在这种方法中,灰度图像的像素值根据阈值被指定为表示黑白颜色的两个值之一。因此,如果一个像素的值大于一个阈值,它被赋予一个值,否则它被赋予另一个值。

如上所示,对蒙版图像应用阈值后,我们只得到输出图像中的车道标线。现在我们可以通过霍夫线变换很容易地检测出这些标记。
8 霍夫线变换
霍夫线变换是一种检测任何可以用数学方法表示的形状的方法。
例如,它可以检测矩形、圆、三角形或直线等形状。我们感兴趣的是检测可以表示为直线的车道标线。
在执行图像阈值化后对图像应用霍夫线变换将提供以下输出:

9 实现车道检测
是时候用Python实现这个车道检测项目了!我推荐使用Google Colab,因为构建车道检测系统需要计算能力。
首先导入所需的库:
import os
import re
import cv2
import numpy as np
from tqdm import tqdm_notebook
import matplotlib.pyplot as plt
# 获取帧的文件名
col_frames = os.listdir('frames/')
col_frames.sort(key=lambda f: int(re.sub('\D', '', f)))# 加载帧
col_images=[]
for i in tqdm_notebook(col_frames):img = cv2.imread('frames/'+i)col_images.append(img)
# 指定一个索引
idx = 457# plot frame
plt.figure(figsize=(10,10))
plt.imshow(col_images[idx][:,:,0], cmap= "gray")
plt.show()

9.1 帧掩码创建
我们感兴趣的区域是一个多边形。我们想掩盖除了这个区域以外的一切。因此,我们首先必须指定多边形的坐标,然后使用它来准备帧掩码:


9.2 图像预处理
我们必须对视频帧执行一些图像预处理操作来检测所需的车道。预处理操作包括:
-
图像阈值化
-
霍夫线变换
9.2.1 图像阈值化

9.2.2 霍夫线变换
lines = cv2.HoughLinesP(thresh, 1, np.pi/180, 30, maxLineGap=200)# 创建原始帧的副本
dmy = col_images[idx][:,:,0].copy()# 霍夫线
for line in lines:x1, y1, x2, y2 = line[0]cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3)# 画出帧
plt.figure(figsize=(10,10))
plt.imshow(dmy, cmap= "gray")
plt.show()

最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机竞赛 深度学习机器视觉车道线识别与检测 -自动驾驶
文章目录 1 前言2 先上成果3 车道线4 问题抽象(建立模型)5 帧掩码(Frame Mask)6 车道检测的图像预处理7 图像阈值化8 霍夫线变换9 实现车道检测9.1 帧掩码创建9.2 图像预处理9.2.1 图像阈值化9.2.2 霍夫线变换 最后 1 前言 🔥 优质竞赛项目系列,今天要分…...

pyqt5使用经验总结
pyqt5环境配置注意: 安装pyqt5 pip install PyQt5 pyqt5-tools 环境变量-创建变量名: 健名:QT_QPA_PLATFORM_PLUGIN_PATH 值为:Lib\site-packages\PyQt5\Qt\plugins pyqt5经验2: 使用designer.exe进行设计࿱…...

【MQTT】mosquitto库中SSL/TLS相关API接口
文章目录 1.相关API1.1 mosquitto_tls_set1.2 mosquitto_tls_insecure_set1.3 mosquitto_tls_opts_set1.4 mosquitto_tls_insecure_set1.5 mosquitto_tls_set_context1.6 mosquitto_tls_psk_set 2.示例代码 Mosquitto 是一个流行的 MQTT 消息代理(broker)…...
假期题目整合
1. 下载解压题目查看即可 典型的猪圈密码只需要照着输入字符解开即可得到答案 2. 冷门类型的密码题型,需要特意去找相应的解题思路,直接百度搜索天干地支解密即可 3. 一眼能出思路他已经给了篱笆墙的提示提示你是栅栏密码对应解密即可 4. 最简单的社会主…...

Redisson—分布式服务
一、 分布式远程服务(Remote Service) 基于Redis的Java分布式远程服务,可以用来通过共享接口执行存在于另一个Redisson实例里的对象方法。换句话说就是通过Redis实现了Java的远程过程调用(RPC)。分布式远程服务基于可…...
volatile使用方法
volatile使用方法 编译优化。使用等级3的话,可能将优化了一些变量。 这为什么会开启等第三呢?这是关于单片机的内存容量比较小,所以开启优化的话,可以可以省一些空间,但是如果。会出现些变量的问题,需要通过…...

提升您的 Go 应用性能的 6 种方法
优化您的 Go 应用程序 1. 如果您的应用程序在 Kubernetes 中运行,请自动设置 GOMAXPROCS 以匹配 Linux 容器的 CPU 配额 Go 调度器 可以具有与运行设备的核心数量一样多的线程。由于我们的应用程序在 Kubernetes 环境中的节点上运行,当我们的 Go 应用程…...
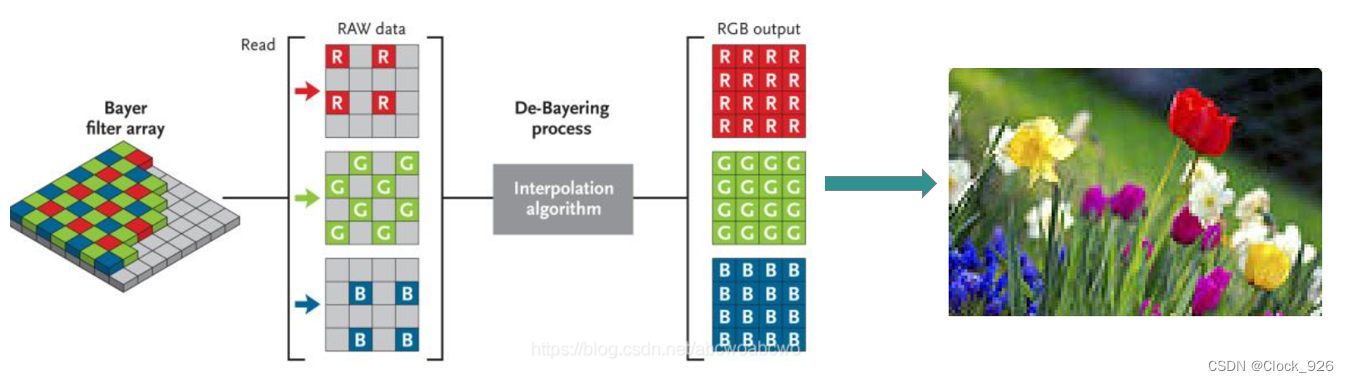
计算摄像技术02 - 颜色空间
一些计算摄像技术知识内容的整理:颜色视觉与感知特性、颜色空间和基于彩色滤镜阵列的彩色感知。 文章目录 一、颜色视觉与感知特性 (1)色调 (2)饱和度 (3)明度 二、颜色空间 (1&…...
Pytorch笔记之分类
文章目录 前言一、导入库二、数据处理三、构建模型四、迭代训练五、模型评估总结 前言 使用Pytorch进行MNIST分类,使用TensorDataset与DataLoader封装、加载本地数据集。 一、导入库 import numpy as np import torch from torch import nn, optim from torch.uti…...
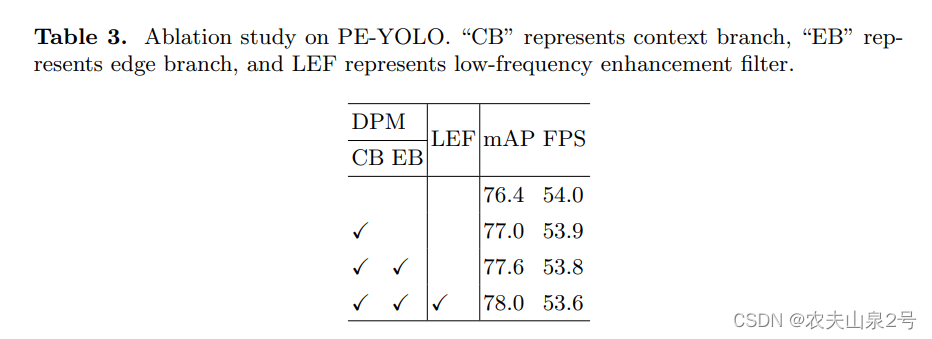
【目标检测】——PE-YOLO精读
yolo,暗光目标检测 论文:PE-YOLO 1. 简介 卷积神经网络(CNNs)在近年来如何推动了物体检测的发展。许多检测器已经被提出,而且在许多基准数据集上的性能正在不断提高。然而,大多数现有的检测器都是在正常条…...

Java 数组转集合
数组转集合 如果仅仅这样转化Arrays.asList(数组),导致集合只能查询,无法进行其他操作,因此,对该方法进行优化: List<实体> list1 new ArrayList<>(Arrays.asList(数组))以上方法就可以使用集合的所有操…...
Elasticsearch:ES|QL 查询语言简介
警告:此功能处于技术预览阶段,可能会在未来版本中更改或删除。 Elastic 将尽最大努力解决任何问题,但技术预览版中的功能不受官方 GA 功能的支持 SLA 的约束。在目前的 Elastic Stack 8.10 中此功能还没有提供。 Elasticsearch 查询语言 (ES|…...

qt qml中listview出现卡顿情况时的常用处理方法
如果在qt QML中使用ListView时出现卡顿情况,可能是因为渲染大量的数据或者在模型中进行复杂的数据处理。以下是常用的解决方法: 1. 设置ListView的缓存策略:通过设置ListView的cacheBuffer属性为适当的值,可以提高滚动的流畅性。…...

Elasticsearch基础操作演示总结
一、索引操作 (一)创建索引 创建Elasticsearch(ES)索引是在ES中存储和管理数据的重要操作之一。索引是用于组织和检索文档的结构化数据存储。 当创建Elasticsearch索引时,通常需要同时指定索引的设置(Se…...

Spring 作用域解析器AnnotationScopeMetadataResolver
博主介绍:✌全网粉丝近5W,全栈开发工程师,从事多年软件开发,在大厂呆过。持有软件中级、六级等证书。可提供微服务项目搭建与毕业项目实战,博主也曾写过优秀论文,查重率极低,在这方面有丰富的经…...
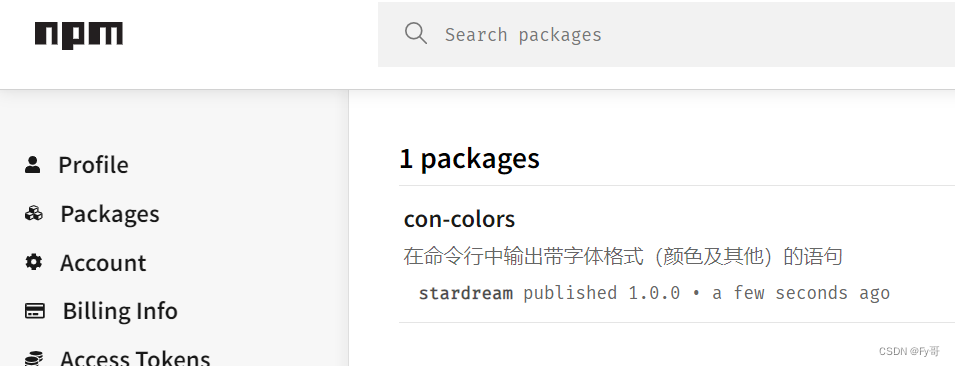
如何发布一个 NPM 包
首先初始化: npm init 文件夹结构 .gitignore Git 库忽略文件清单.npmignore 不包括在 npm 注册库中的文件清单LECENSE 模块的授权文件README.md 说明文档bin 保存模块可执行文件的文件夹doc 保存模块文档的文件夹example 保存模块实际示例lib 保存模块代码man 保存模块的手册…...
)
Flask小项目教程(含MySQL与前端部分)
CONTENTS 1. 环境配置2. 快速搭建Flask应用程序 1. 环境配置 首先我们在项目的根目录下创建一个 Python 虚拟环境,打开命令行输入以下指令: python -m venv venv启动虚拟环境: .\venv\Scripts\Activate.ps1如果遇到报错:.\venv…...
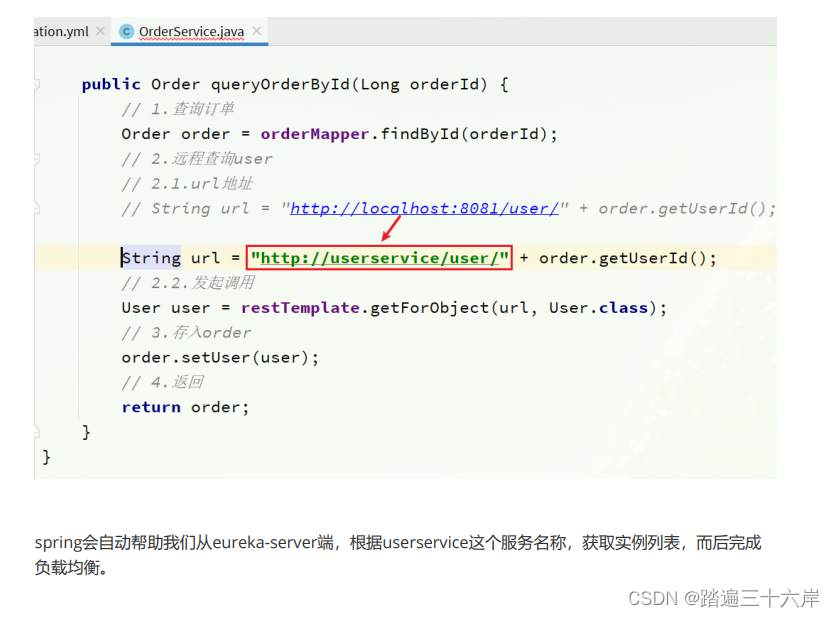
Eureka
大家好我是苏麟今天带来Eureka的使用 . 提供者和消费者 在服务调用关系中,会有两个不同的角色: 服务提供者:一次业务中,被其它微服务调用的服务。(提供接口给其它微服务) 服务消费者:一次业务…...
STM32G070RBT6-MCU温度测量(ADC)
1、借助STM32CubeMX生成系统及外设相关初始化代码。 在以上配置后就可以生成相关初始化代码了。 /* ADC1 init function */ void MX_ADC1_Init(void) {/* USER CODE BEGIN ADC1_Init 0 *//* USER CODE END ADC1_Init 0 */ADC_ChannelConfTypeDef sConfig {0};/* USER COD…...

数据结构之带头双向循环链表
目录 链表的分类 带头双向循环链表的实现 带头双向循环链表的结构 带头双向循环链表的结构示意图 空链表结构示意图 单结点链表结构示意图 多结点链表结构示意图 链表创建结点 双向链表初始化 销毁双向链表 打印双向链表 双向链表尾插 尾插函数测试 双向链表头插 …...

BiliTools:跨平台资源管理与高效解析的哔哩哔哩工具箱
BiliTools:跨平台资源管理与高效解析的哔哩哔哩工具箱 【免费下载链接】BiliTools A cross-platform bilibili toolbox. 跨平台哔哩哔哩工具箱,支持视频、音乐、番剧、课程下载……持续更新 项目地址: https://gitcode.com/GitHub_Trending/bilit/Bili…...

抖音音频提取工具 v1.0 - 快速提取抖音视频音频
抖音音频提取工具 v1.0 是可快速提取抖音短视频音频并保存本地的实用工具,依托 WebView2 与 FFmpeg 技术实现,操作简单易上手,能满足车机播放等个人娱乐音频使用需求,工具仅支持个人娱乐使用。抖音音频提取工具 v1.0 抖音短视频音…...
附Matlab代码)
【图像加密解密】基于Halton 序列图像加密解密位置扰乱和像素扰乱(含相关性分析)附Matlab代码
作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真关注我领取海量matlab电子书和数学建模资料 🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。ὒ…...

Verilog实战精要:从语法基础到高效状态机设计
1. Verilog语法基础:从硬件思维出发 第一次接触Verilog时,很多人会把它当成普通编程语言来学,结果发现处处碰壁。我当年在FPGA项目上栽的第一个跟头,就是把阻塞赋值用在了时钟触发的always块里,导致仿真结果和实际硬件…...

LFM2.5-1.2B-Thinking-GGUF基础教程:单页Web界面交互逻辑与后处理机制
LFM2.5-1.2B-Thinking-GGUF基础教程:单页Web界面交互逻辑与后处理机制 1. 模型与平台介绍 LFM2.5-1.2B-Thinking-GGUF是Liquid AI推出的轻量级文本生成模型,专为低资源环境优化设计。这个镜像采用内置GGUF模型文件和llama.cpp运行时,提供了…...

YOLO_World+SAM+GraspNet在mujoco中的抓取仿真实战:从环境搭建到代码运行
YOLO_WorldSAMGraspNet在MuJoCo中的抓取仿真实战:从环境搭建到代码运行 在机器人抓取仿真领域,结合YOLO_World、SAM(Segment Anything Model)和GraspNet三大前沿技术,能够在MuJoCo物理引擎中实现高度逼真的物体识别、分…...

Vlc.DotNet:在.NET应用中构建专业级媒体播放能力
Vlc.DotNet:在.NET应用中构建专业级媒体播放能力 【免费下载链接】Vlc.DotNet .NET control that hosts the audio/video capabilities of the VLC libraries 项目地址: https://gitcode.com/gh_mirrors/vl/Vlc.DotNet 价值定位:解决.NET媒体播放…...

阅读书源校验工具verifyBookSource v2.0避坑指南:如何避免无效书源和重复书源
verifyBookSource v2.0 高效书源管理实战:从校验到优化的完整指南 在数字阅读日益普及的今天,一个优质的书源库能显著提升阅读体验。然而,面对海量书源,如何快速筛选有效内容、剔除重复资源,成为许多阅读爱好者的痛点。…...

SDXL-Turbo在虚拟现实中的应用:实时环境生成技术
SDXL-Turbo在虚拟现实中的应用:实时环境生成技术 想象一下,在虚拟世界中每走一步,周围的景色就随之变化——茂密的森林在你眼前生长,古老的城堡在远处拔地而起,这一切都发生在眨眼之间。这不是魔法,而是SDX…...

滞回比较器设计实战:从理论到参数优化
1. 滞回比较器基础:从门铃到航天器的抗噪神器 第一次接触滞回比较器是在大学电子设计课上,当时教授用一个生动的例子开场:"想象你家的门铃——如果它对任何风吹草动都响个不停,你会疯掉;但如果连用力敲门都没反应…...