OpenCV Python – 使用SIFT算法实现两张图片的特征匹配
OpenCV Python – 使用SIFT算法实现两张图片的特征匹配
1.要实现在大图中找到任意旋转、缩放等情况下的小图位置,可以使用特征匹配算法,如 SIFT (尺度不变特征变换) 或 SURF (加速稳健特征)。这些算法可以在不同尺度和旋转情况下寻找匹配的特征点
import cv2
import numpy as npdef find_template(template_path, image_path):# 加载图像template = cv2.imread(template_path, 0)image = cv2.imread(image_path, 0)# 初始化 SIFT 探测器sift = cv2.xfeatures2d.SIFT_create()# 在模板和大图中检测特征点和特征描述符keypoints1, descriptors1 = sift.detectAndCompute(template, None)keypoints2, descriptors2 = sift.detectAndCompute(image, None)# 初始化暴力匹配器matcher = cv2.DescriptorMatcher_create(cv2.DescriptorMatcher_BRUTEFORCE)# 寻找最佳匹配matches = matcher.match(descriptors1, descriptors2)# 根据匹配度排序matches = sorted(matches, key=lambda x: x.distance)# 提取匹配结果num_good_matches = int(len(matches) * 0.15) # 根据匹配结果数自行调整,这里取前 15% 的匹配结果good_matches = matches[:num_good_matches]# 提取匹配结果的对应关系src_pts = np.float32([keypoints1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)dst_pts = np.float32([keypoints2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)# 计算透视变换矩阵M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)# 获取模板图像的宽高h, w = template.shape# 在大图中查找模板位置matches_mask = mask.ravel().tolist()if sum(matches_mask) > 10:pts = np.float32([[0, 0], [0, h - 1], [w - 1, h - 1], [w - 1, 0]]).reshape(-1, 1, 2)dst = cv2.perspectiveTransform(pts, M)return dst.reshape(4, 2)else:return None# 示例用法
template_path = 'path_to_template_image.png'
image_path = 'path_to_large_image.png'
result = find_template(template_path, image_path)if result is not None:print("找到了模板图像的位置:")for pt in result:print("坐标:", pt)
else:print("未找到模板图像")
2.我们使用了 SIFT 算法检测和匹配特征点,然后使用 RANSAC 算法计算透视变换矩阵,从而得到模板图像在大图中的位置。根据你的需求,你可以根据实际情况调整代码中的阈值以及匹配结果的筛选条件。
请注意,使用 SIFT 算法需要安装额外的 OpenCV 扩展库,可以通过 pip 安装:pip install opencv-contrib-python。如果你使用的是不带 SIFT 的 OpenCV 版本,你可以尝试 SURF 算法,或者使用其他特征提取和匹配算法来适应不同的图像变换情况。
相关文章:

OpenCV Python – 使用SIFT算法实现两张图片的特征匹配
OpenCV Python – 使用SIFT算法实现两张图片的特征匹配 1.要实现在大图中找到任意旋转、缩放等情况下的小图位置,可以使用特征匹配算法,如 SIFT (尺度不变特征变换) 或 SURF (加速稳健特征)。这些算法可以在不同尺度和旋转情况下寻找匹配的特征点 impo…...

doc转html后添加style和导航
public static void main(String[] args) throws Exception {docxToHtml(); } public static void docxToHtml() throws Exception {//D:\zpdtolly\工作总结文档\zpd使用文档\v4\用户使用手册\客户端使用手册String sourceFileName "C:\\Users\\luoguoqing\\Desktop\\202…...

Python中跨越多个文件使用全局变量
嗨喽,大家好呀~这里是爱看美女的茜茜呐 这个琐碎的指南是关于在 Python 中跨多个文件使用全局变量。 但是在进入主题之前,让我们简单地看看全局变量和它们在多个文件中的用途。 👇 👇 👇 更多精彩机密、教程ÿ…...
设计模式 - 解释器模式
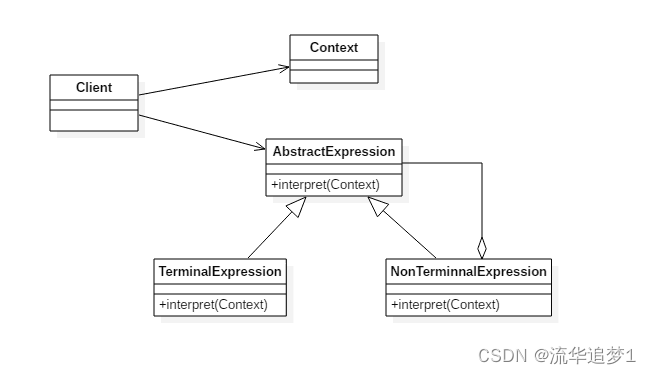
目录 一. 前言 二. 实现 三. 优缺点 一. 前言 解释器模式(Interpreter Pattern)指给定一门语言,定义它的文法的一种表示,并定义一个解释器,该解释器使用该表示来解释语言中的句子,属于行为型设计模式。是…...

javascript禁止鼠标右键和复制功能
要禁止鼠标右键和复制功能,可以编写如下的封装函数: function preventDefaultCopy(event) {// 禁止右键 菜单和复制event.preventDefault();event.stopPropagation();return false; }// 在需要禁止复制的元素上添加该事件监听器 element.addEventListen…...

WebDAV之π-Disk派盘 + 咕咚云图
咕咚云图是一款强大的图床传图软件,它能够让您高效地对手机中的各种图片进行github传输,多个平台快速编码上传,支持远程删除不需要的图片,传输过程安全稳定,让您可以很好的进行玩机或者其他操作。 可帮你上传手机图片到图床上,并生成 markdown 链接,支持七牛云、阿里云…...
C语言-数组
C 语言支持数组数据结构,数组是一个由若干相同类型变量组成的有序集合。 这里的有序是指数组元素在内存中的存放方式是有序的,即所有的数组都是由连续的内存位置组成。最低的地址对应第一个元素,最高的地址对应最后一个元素。 在 C 语言中&am…...
)
Linux UWB Stack实现——MCPS调度接口(API)
在上一篇文章中,介绍了MCPS调度接口涉及的相关数据结构实现MCPS调度接口(数据结构),本文继续介绍调度相关的方法的实现。 1. 域处理 1.1 域注册与注销 注册/注销一个mcps802154_region,分别在模块加载(mo…...
el-tree中插入图标并且带提示信息
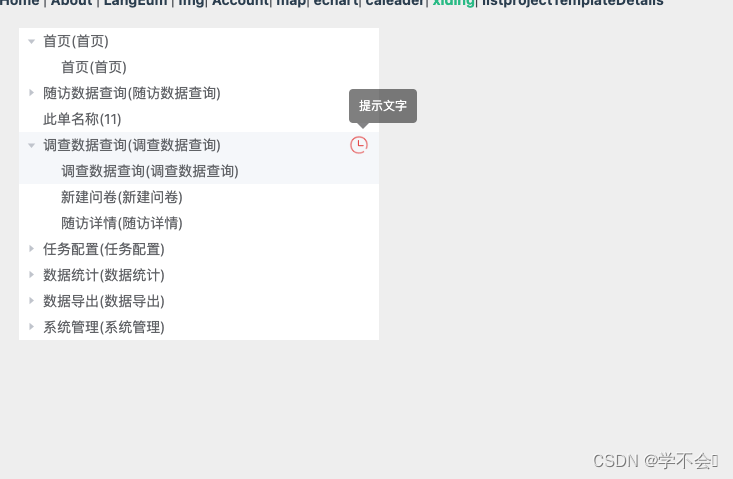
<template><div class"left"><!-- default-expanded-keys 默认展开 --><!-- expand-on-click-node 只有点击箭头才会展开树 --><el-tree :data"list" :props"defaultProps" node-click"handleNodeClick" :…...

竞赛选题 深度学习 YOLO 实现车牌识别算法
文章目录 0 前言1 课题介绍2 算法简介2.1网络架构 3 数据准备4 模型训练5 实现效果5.1 图片识别效果5.2视频识别效果 6 部分关键代码7 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于yolov5的深度学习车牌识别系统实现 该项目较…...
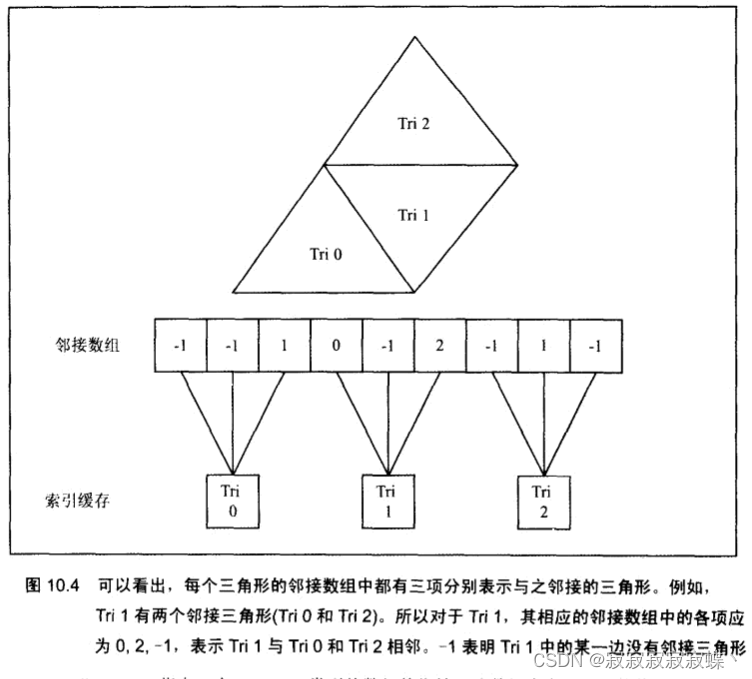
Direct3D网格(一)
创建网格 我们可以用D3DXCreateMeshFVF函数创建一个"空"网格对象 ,空网格对象是指我们指定了网格的面片总数和顶点总数,然后由该函数为顶点缓存、索引缓存和属性缓存分配大小合适的内存,之后即可手工填入网格数据。 HRESULT WINA…...
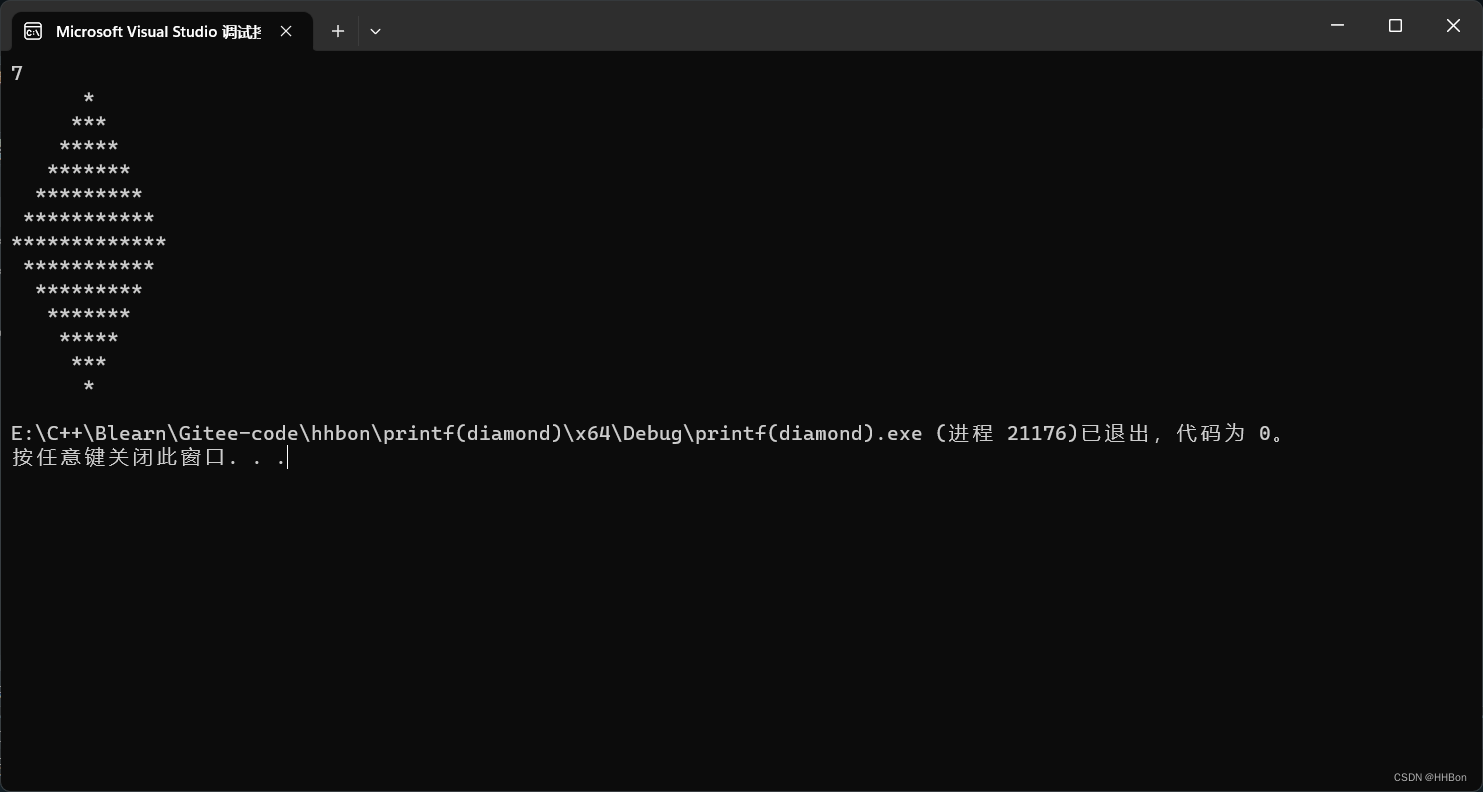
C语言打印菱形
一、运行结果图 二、源代码 # define _CRT_SECURE_NO_WARNINGS # include <stdio.h>int main() {//初始化变量值;int line 0;int i 0;int j 0;//获取变量值;scanf("%d", &line);//循环打印上半部分;for (i 0; i <…...
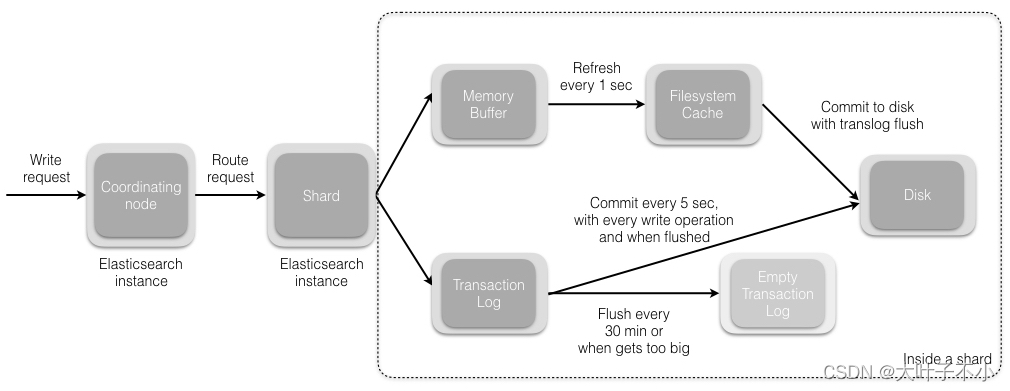
ElasticSearch搜索引擎:数据的写入流程
一、ElasticSearch 写数据的总体流程: (1)ES 客户端选择一个节点 node 发送请求过去,这个节点就是协调节点 coordinating node (2)协调节点对 document 进行路由,通过 hash 算法计算出数据应该…...

python3 调用 另外一个python脚本
3种python调用其他脚本脚本的方法_python 调用python脚本_linjingyg的博客-CSDN博客 Python之系统交互(调用系统命令)subprocess_subprocess.getoutput(cmd) 参数格式不正确-CSDN博客 subprocess.call()只能返回状态码。subprocess.getoutput(cmd)只能输出命令结果。 str(py…...

【13】c++设计模式——>简单工厂模式
工厂模式的定义 c中的工厂模式是一种创建型设计模式,它提供一种创建对象的接口,但具体创建的对象类型可以在运行时决定,这样可以将对象的创建与使用代码分离,提高代码的灵活性和可维护性。 在c中实现工厂模式,通常会定…...

系统架构设计:2 论软件设计方法及其应用
目录 一 软件设计方法 1结构化设计 2信息工程 3面向对象设计 4原型设计...

基于Winform的UDP通信
1、文件结构 2、UdpReceiver.cs using System; using System.Collections.Generic; using System.Linq; using System.Net; using System.Net.Sockets; using System.Text; using System.Threading.Tasks;namespace UDPTest.Udp {public class UdpStateEventArgs : EventArgs…...
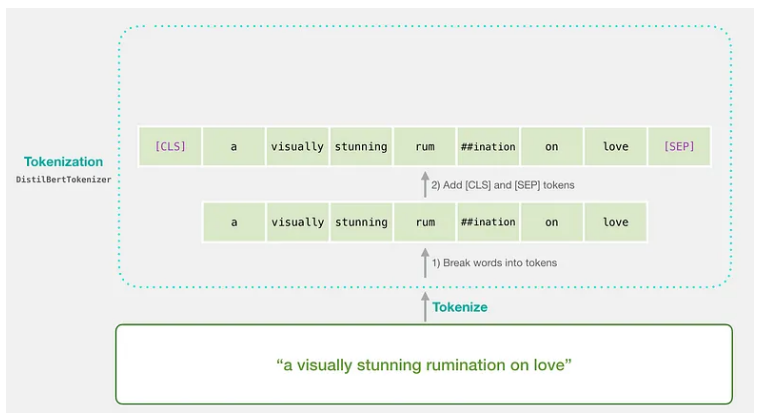
掌握 BERT:自然语言处理 (NLP) 从初级到高级的综合指南(1)
简介 BERT(来自 Transformers 的双向编码器表示)是 Google 开发的革命性自然语言处理 (NLP) 模型。它改变了语言理解任务的格局,使机器能够理解语言的上下文和细微差别。在本文[1]中,我们将带您踏上从 BERT 基础知识到高级概念的旅…...
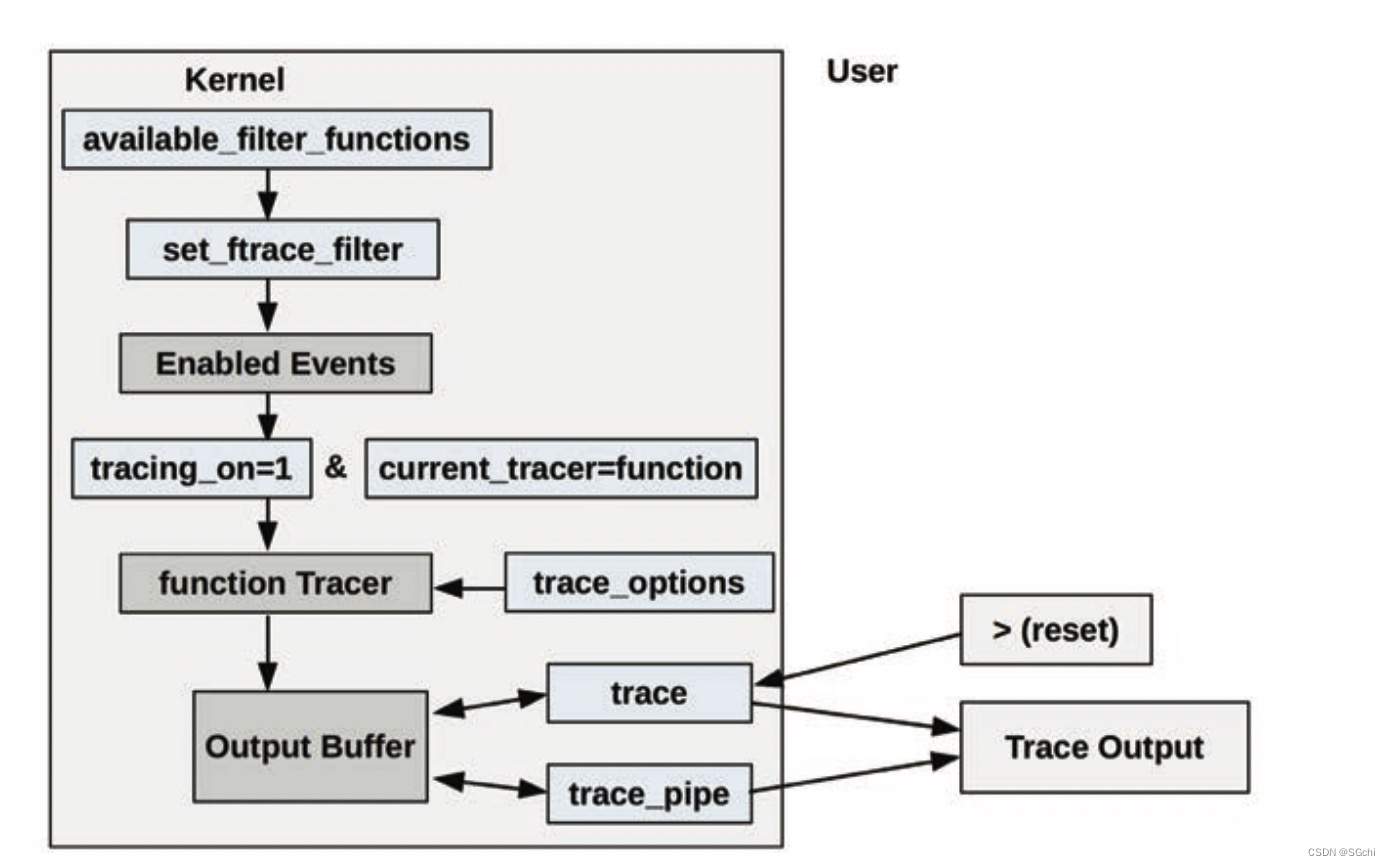
Linux Ftrace介绍
文章目录 一、简介二、内核函数调用跟踪参考链接: 一、简介 Ftrace 是 Linux 官方提供的跟踪工具,在 Linux 2.6.27 版本中引入。Ftrace 可在不引入任何前端工具的情况下使用,让其可以适合在任何系统环境中使用。 Ftrace 可用来快速排查以下相…...

Go语言进阶------>init()函数
Init()包初始化 执行优先级 Init()函数的执行优先级比main()函数的执行优先级要高,也就是说程序会优先执行Init()函数之后再执行main()函数. 代码如下 package mainimport "fmt"func init() {fmt.Println("执行了Init()函数") }func main() {fmt.Println…...


图像边缘检测避坑指南:用Python调参时,Sobel和Laplacian的那些‘坑’你踩过吗?
图像边缘检测实战避坑手册:从Sobel到Laplacian的调参艺术 边缘检测是计算机视觉中最基础却最易翻车的操作之一。第一次用OpenCV实现Sobel算子时,我盯着屏幕上那些断裂的边缘和噪点陷入沉思——为什么教科书上的示例如此完美,而我的代码却像被…...

AI编码助手安全规则实战:为Cursor定制安全防线,防范硬编码与注入风险
1. 项目概述:当AI编码助手遇上安全红线最近在GitHub上看到一个挺有意思的项目,叫“Deadly244/cursor-security-rules”。光看名字,你可能会觉得这又是一个关于网络安全或代码审计的工具。但点进去仔细一看,发现它的定位非常精准且…...

鸿蒙 HarmonyOS 6 | Pura X Max 鸿蒙原生适配 07:页面边距和最大内容宽度控制
前言 Pura X Max 展开态最容易出现的一类问题,是内容区域被直接撑满整屏。 列表页还能通过双列、三列解决一部分空间问题,阅读页、表单页、详情页就没这么简单了。标题、正文、输入框、说明文字一旦横向拉得太宽,用户读起来会很累。尤其是详情…...

Adafruit IO物联网平台:从零构建环境监测与报警系统
1. 项目概述:为什么你需要一个像Adafruit IO这样的物联网平台?如果你玩过Arduino、树莓派或者任何单片机,肯定遇到过这样的场景:费了老大劲写代码让传感器读出数据,结果这些数据要么在串口监视器里一闪而过,…...

终极硬件调优指南:如何用UXTU免费解锁电脑隐藏性能
终极硬件调优指南:如何用UXTU免费解锁电脑隐藏性能 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal-x86-Tuning-Utility 还在为电脑性能…...

STM32F411CEU6实战:用W25Q64给1.54寸LCD屏做个‘离线相册’,附完整源码与图片转换工具
STM32F411CEU6与W25Q64打造智能离线相册:从图片压缩到流畅显示的完整方案 在嵌入式开发领域,如何高效地存储和显示大量图片一直是个颇具挑战性的课题。传统方案往往受限于微控制器的有限内存,而外部存储与显示技术的结合为这个问题提供了优雅…...

Postman便携版终极指南:绿色免安装的Windows API测试工具
Postman便携版终极指南:绿色免安装的Windows API测试工具 【免费下载链接】postman-portable 🚀 Postman portable for Windows 项目地址: https://gitcode.com/gh_mirrors/po/postman-portable Postman便携版是一款专为Windows用户设计的绿色免安…...

GTA5线上小助手:终极免费工具让你的洛圣都之旅更精彩
GTA5线上小助手:终极免费工具让你的洛圣都之旅更精彩 【免费下载链接】GTA5OnlineTools GTA5线上小助手 项目地址: https://gitcode.com/gh_mirrors/gt/GTA5OnlineTools 还在为GTA5线上模式中繁琐的操作而烦恼吗?想要更轻松地管理游戏数据、快速到…...

3步彻底清理Windows右键菜单:ContextMenuManager高效管理指南
3步彻底清理Windows右键菜单:ContextMenuManager高效管理指南 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 你是否曾因Windows右键菜单中堆积如山的…...