Can 通信-协议
概述
CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO国际标准化的串行通信协议。
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统 被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个 LAN,进行大量数据的高速通信”的需 要,1986 年德国电气商博世公司开发出面向汽车的 CAN 通信协议。此后,CAN 通过 ISO11898 及 ISO11519 进 行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
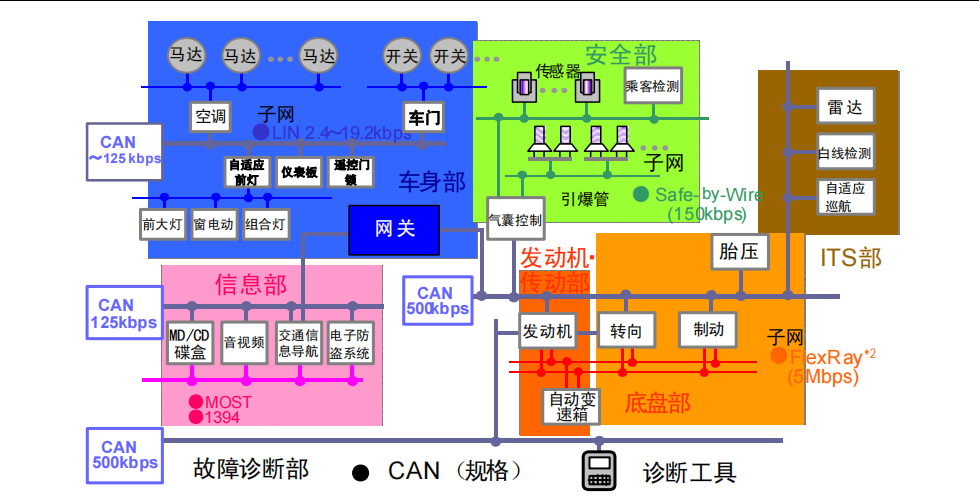
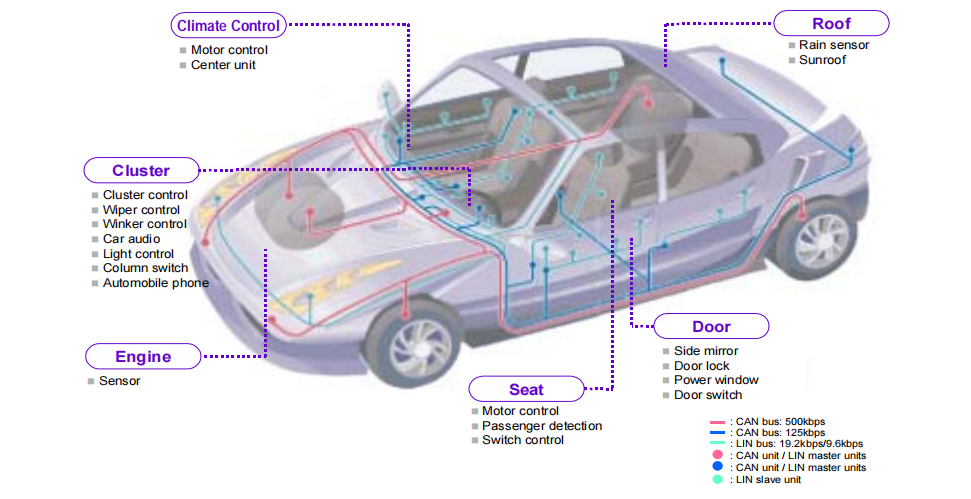
下图 是车载网络的构想示意图。CAN 等通信协议的开发,使多种 LAN 通过网关进行数据交换得以实现。
发展历史
-
1970s:创始:
CAN总线最早于20世纪70年代由德国的罗伯特·博丁(Robert Bosch GmbH)开发,用于解决汽车电子系统的通信需求。博丁的团队在开发CAN总线时主要关注实时性、可靠性和抗干扰性。
-
1980s:首次应用于汽车业:
CAN总线于1986年首次应用于汽车电子控制系统,这标志着它在汽车行业中的商业化应用。它取代了传统的多芯电缆,并改进了汽车电子系统的通信。
-
1990s:国际标准化:
1991年,CAN总线成为国际标准ISO 11898的一部分。这一标准化促进了CAN总线在世界范围内的广泛应用,不仅用于汽车,还用于工业自动化、医疗设备和其他领域。
-
21世纪:广泛应用:
从21世纪初期开始,CAN总线逐渐成为嵌入式系统和工业自动化领域的标准通信协议。它也被广泛用于飞机、火箭、医疗设备和电力系统等领域。
-
CAN FD(CAN with Flexible Data Rate):
为了满足更高数据传输速率的需求,CAN FD于2012年引入。CAN FD允许更高的数据速率,同时保持CAN总线的实时性和可靠性。
-
2020s:现代化:
CAN总线仍然是许多领域的关键通信协议,但现代应用要求更高的性能、数据吞吐量和网络复杂性。因此,CAN总线继续演进,以满足新的需求。
特点
- (1) 多主控制
在总线空闲时,所有的单元都可开始发送消息(多主控制)。
最先访问总线的单元可获得发送权(CSMA/CA 方式*1)。
多个单元同时开始发送时,发送高优先级 ID 消息的单元可获得发送权。
- (2) 消息的发送
在 CAN 协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发送新消息。两个以上的单元同时开始发送消息时,根据标识符(Identifier 以下称为 ID)决定优先级。ID 并不是表示发送的目的地址,而是表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消
息 ID 的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
- (3) 系统的柔软性
与总线相连的单元没有类似于“地址”的信息。因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
- (4) 通信速度
根据整个网络的规模,可设定适合的通信速度。
在同一网络中,所有单元必须设定成统一的通信速度。即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信。不同网络间则可以有不同的通信速度。
- (5) 远程数据请求
可通过发送“遥控帧” 请求其他单元发送数据。
- (6) 错误检测功能·错误通知功能·错误恢复功能
所有的单元都可以检测错误(错误检测功能)。
检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。
正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功能)。
- (7) 故障封闭
CAN 可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
- (8) 连接
CAN 总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
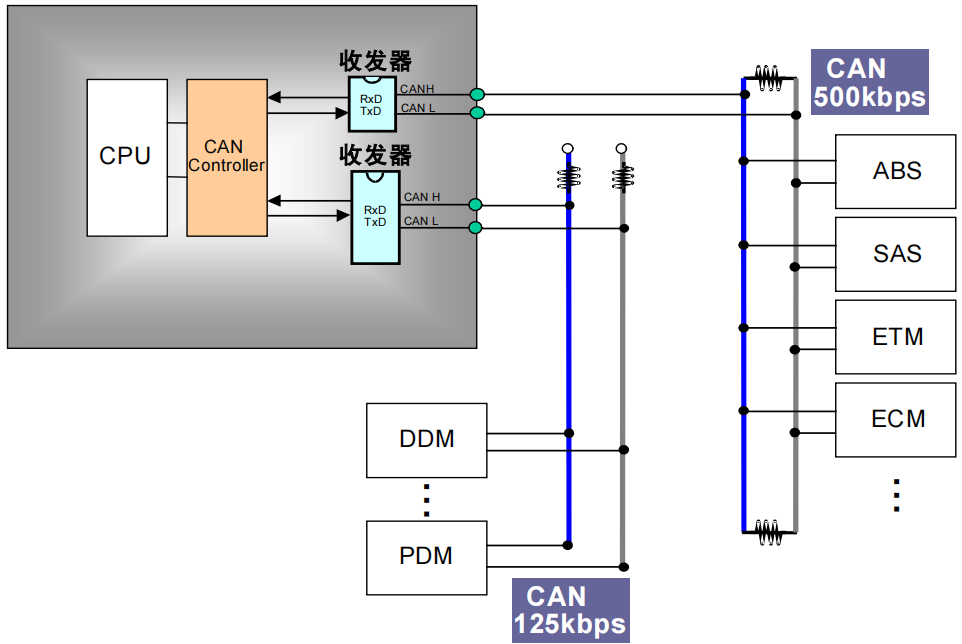
总线拓扑图
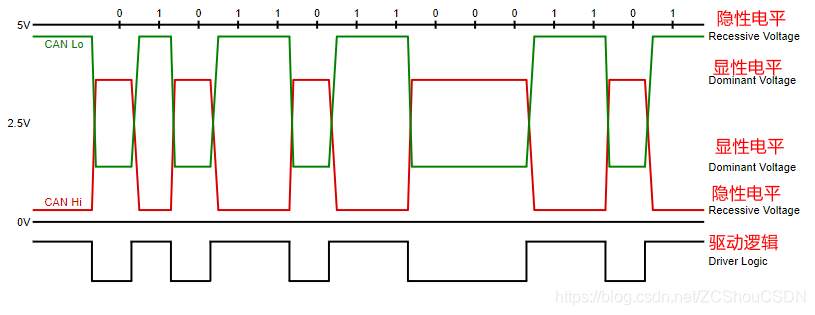
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
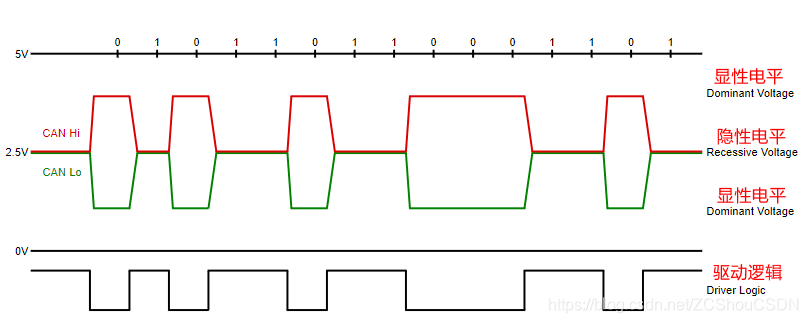
物理电平
在 CAN总 线上,利用 CAN_H 和 CAN_L 两根线上的电位差来表示 CAN 信号。CAN 总线上的电位差分为 显性电平(Dominant Voltage) 和 隐性电平(Recessive Voltage) 。其中显性电平为逻辑 0,隐性电平为逻辑 1。模块以线与的方式连接到总线:如果只有一个节点将总线驱动到逻辑0,则整个总线处于该状态,而不管发送逻辑1的节点数量。
- 高速 CAN 总线在传输显性(0)信号时,会将 CAN_H 端抬向 5V 高电平,将 CAN_L 拉向 0V 低电平。当传输隐性(1)信号时,并不会驱动 CAN_H 或者 CAN_L 端。 显性信号 CAN_H 和 CAN_L 两端差分标称电压为 2V。 终端电阻在没有驱动时,将差分标称电压降回 0V。显性信号(0)的共模电压需要在 1.5V 到 3.5V 之间。隐性信号(1)的共模电压需要在 +/-12V。
- 低速/容错CAN信号在传输显性信号(0)时,驱动CANH端抬向5V,将CANL端降向0V。在传输隐性信号(1)时并不驱动CAN 总线的任何一端。在电源电压Vcc为5V时,显性信号差分电压需要大于2.3V,隐性信号的差分电压需要小于0.6V。CAN总线两端未被驱动时,终端电阻使CANL端回归到RTH电压(当电源电压Vcc为5V时,RTH电压至少为Vcc-0.3V=4.7V),同时使CANH端回归至RTL电压(RTL电压最大为0.3V)。两根线需要能够承受-27V至40V的电压而不被损坏。
在高速和低速CAN中,从隐性信号向显性信号过渡的速度更快,因为此时CAN线缆被主动积极地驱动。显性向隐性的过渡速度主要取决于CAN网络的长度和导线的电容。
CAN总线采用不归零码位填充技术(NRZ),发送器只要检测到位流里有5个连续相同值的位,便自动在位流里插入补充位
错误
错误状态的种类
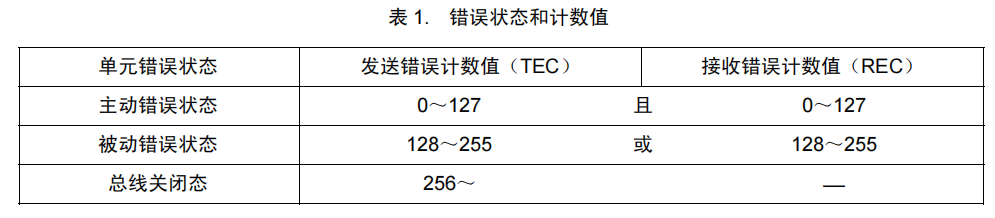
单元始终处于 3 种状态之一。
(1) 主动错误状态
主动错误状态是可以正常参加总线通信的状态。
处于主动错误状态的单元检测出错误时,输出主动错误标志。
(2) 被动错误状态
被动错误状态是易引起错误的状态。
处于被动错误状态的单元虽能参加总线通信,但为不妨碍其它单元通信,接收时不能积极地发送错误通知。
处于被动错误状态的单元即使检测出错误,而其它处于主动错误状态的单元如果没发现错误,整个总线也被认为是没有错误的。
处于被动错误状态的单元检测出错误时,输出被动错误标志。
另外,处于被动错误状态的单元在发送结束后不能马上再次开始发送。在开始下次发送前,在间隔帧期间内必须插入“延迟传送”(8 个位的隐性位)。
(3) 总线关闭态
总线关闭态是不能参加总线上通信的状态。
信息的接收和发送均被禁止。
这些状态依靠发送错误计数和接收错误计数来管理,根据计数值决定进入何种状态。错误状态和计数值的关系如表 1 及下图 所示。

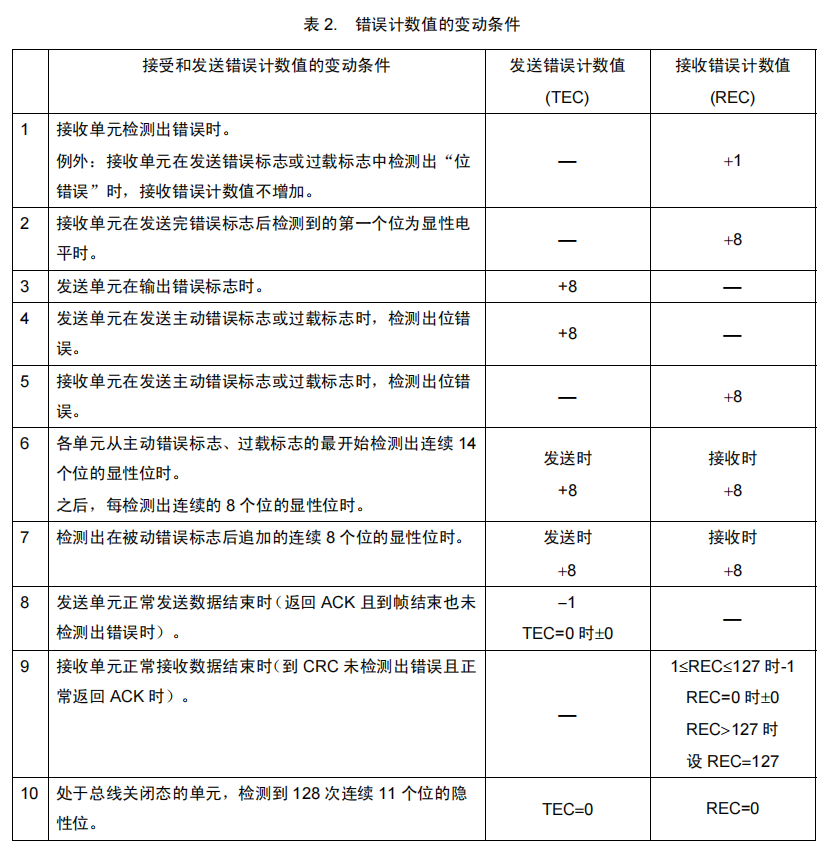
错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
CAN 协议栈的基本概念
CAN 协议如表 3 所示涵盖了 ISO 规定的 OSI 基本参照模型中的传输层、数据链路层及物理层。
CAN 协议中关于 ISO/OSI 基本参照模型中的传输层、数据链路层及物理层,具体有哪些定义如下图所示。


* 1 LLC : Logical Link Control (逻辑链路控制 )* 2 MAC : Medium Access Control (媒介访问控制)
数据链路层分为 MAC 子层和 LLC 子层,MAC 子层是 CAN 协议的核心部分。数据链路层的功能是将物理层收到的信号组织成有意义的消息,并提供传送错误控制等传输控制的流程。具体地说,就是消息的帧化、仲裁、应答、错误的检测或报告。数据链路层的功能通常在 CAN 控制器的硬件中执行。
在物理层定义了信号实际的发送方式、位时序、位的编码方式及同步的步骤。但具体地说,信号电平、通信速度、采样点、驱动器和总线的电气特性、连接器的形态等均未定义*1。这些必须由用户根据系统需求自行确定。
通信帧
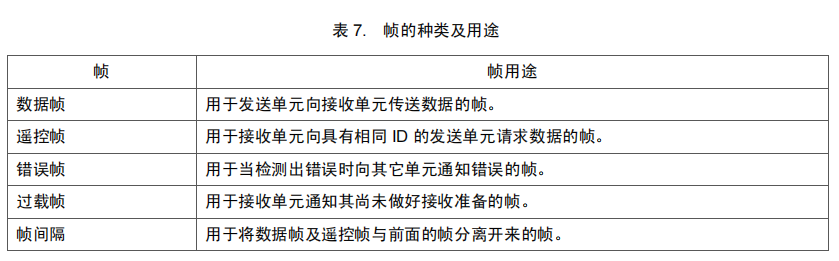
帧的种类
通信是通过以下 5 种类型的帧进行的。
• 数据帧
• 遥控帧
• 错误帧
• 过载帧
• 帧间隔
另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下称 ID),
扩展格式有 29 个位的 ID。
各种帧的用途如表 7 所示
数据帧
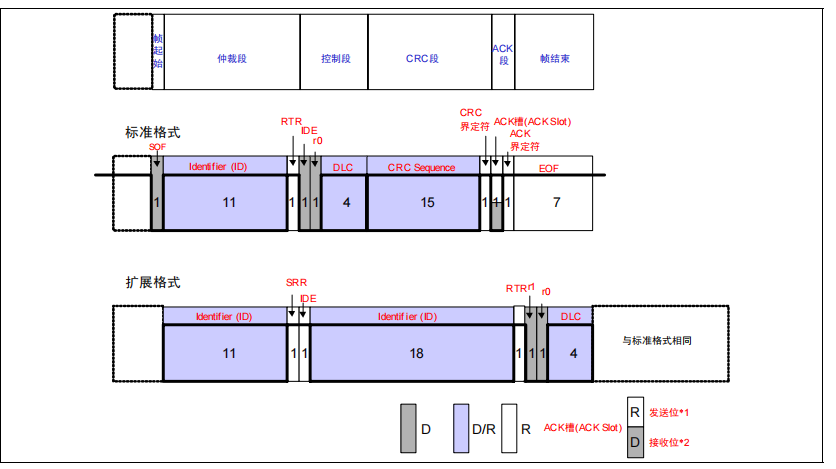
数据帧由 7 个段构成。如下图所示。

| 帧起始 | 表示数据帧开始的段。 | 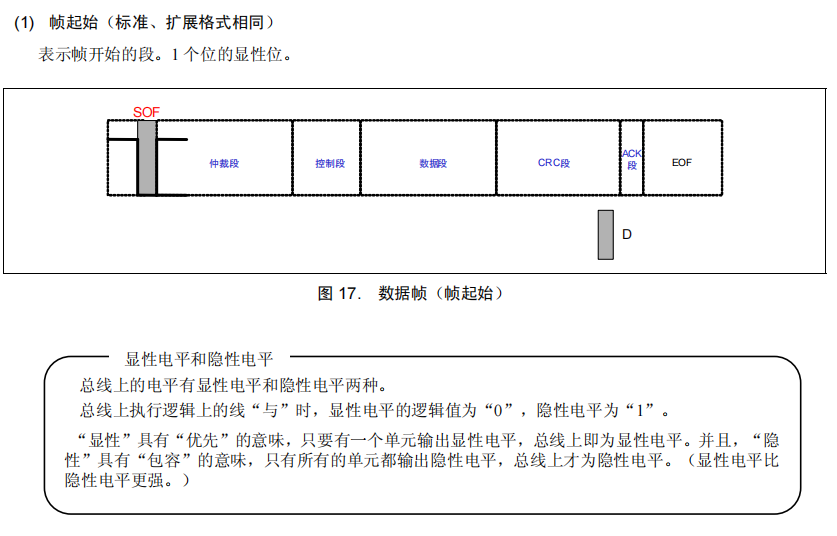 |
| 仲裁段 | 表示该帧优先级的段。 | 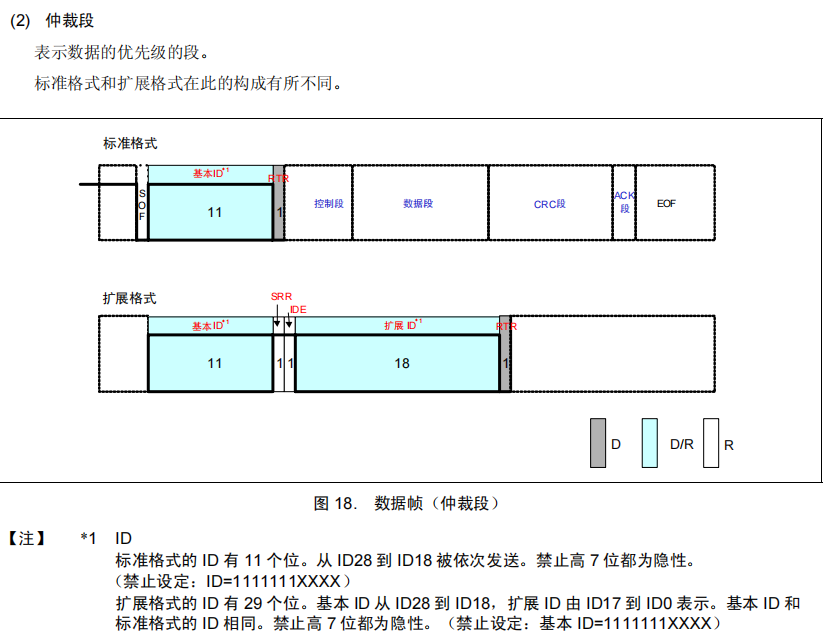 |
| 控制段 | 表示数据的字节数及保留位的段。 |  |
| 数据段 | 数据的内容,可发送 0~8 个字节的数据。 | 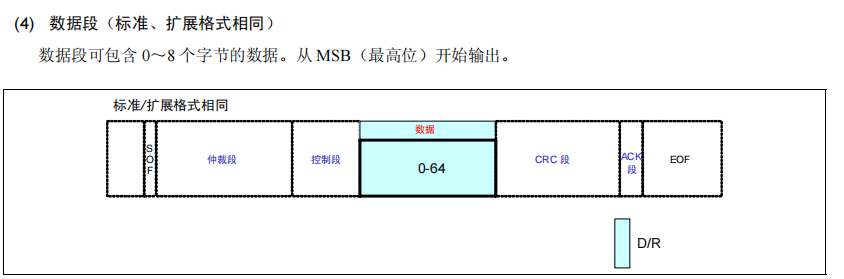 |
| CRC 段 | 检查帧的传输错误的段。 | 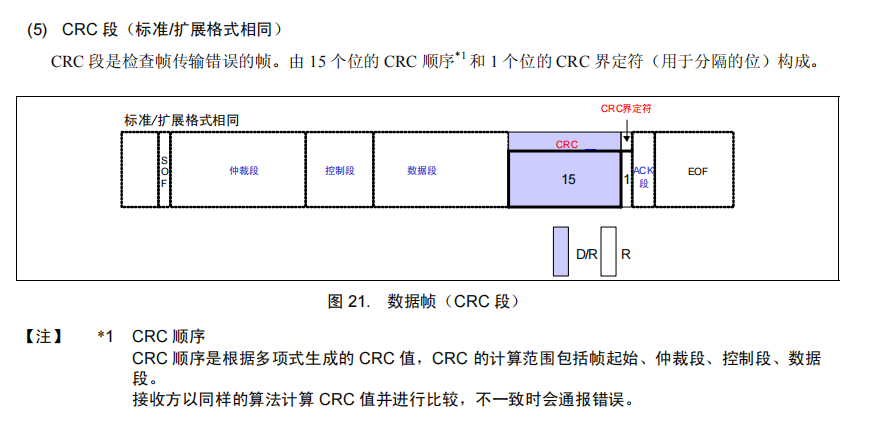 |
| ACK 段 | 表示确认正常接收的段。 | 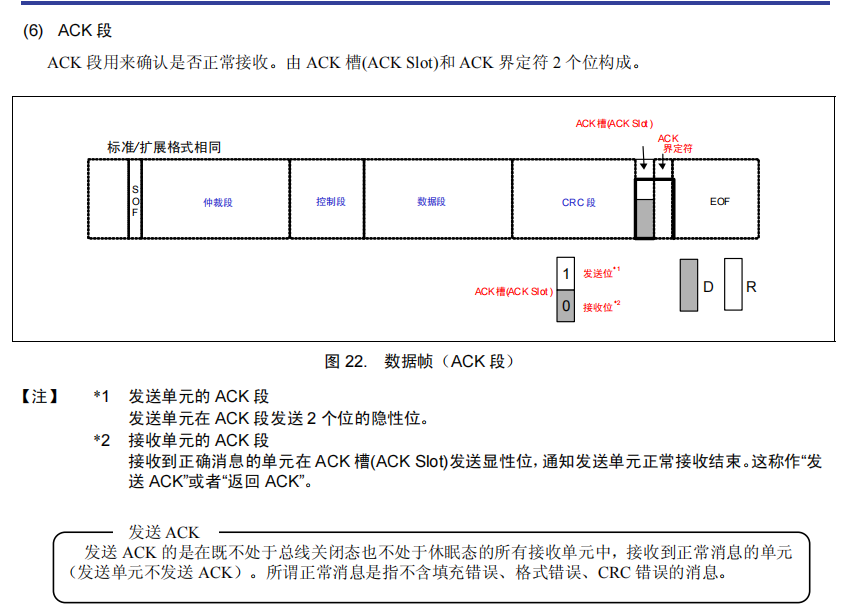 |
| 帧结束 | 表示数据帧结束的段。 | 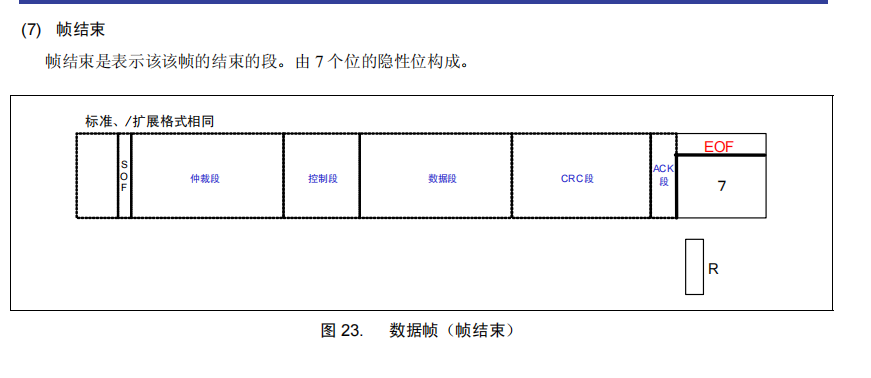 |
遥控帧
| 帧起始 | 表示数据帧开始的段。 |
| 仲裁段 | 表示该帧优先级的段。 |
| 控制段 | 表示数据的字节数及保留位的段。 |
| CRC 段 | 检查帧的传输错误的段。 |
| ACK 段 | 表示确认正常接收的段。 |
| 帧结束 | 表示数据帧结束的段。 |
遥控帧和数据帧
• 数据帧和遥控帧的不同
遥控帧的 RTR 位为隐性位,没有数据段。
没有数据段的数据帧和遥控帧可通过 RTR 位区别开来。
• 遥控帧没有数据段,数据长度码该如何表示?
遥控帧的数据长度码以所请求数据帧的数据长度码表示。
• 没有数据段的数据帧有何用途?
例如,可用于各单元的定期连接确认/应答、或仲裁段本身带有实质性信息的情况下。
错误帧
用于在接收和发送消息时检测出错误通知错误的帧。错误帧由错误标志和错误界定符构成。
错误帧的构成如图 25 所示。
(1) 错误标志
错误标志包括主动错误标志和被动错误标志两种。
主动错误标志:6 个位的显性位。
被动错误标志:6 个位的隐性位。
(2) 错误界定符
错误界定符由 8 个位的隐性位构成。
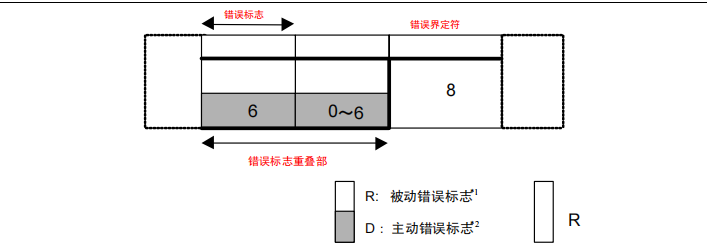
* 1 主动错误标志处于主动错误状态的单元检测出错误时输出的错误标志。* 2 被动错误标志处于被动错误状态的单元检测出错误时输出的错误标志。
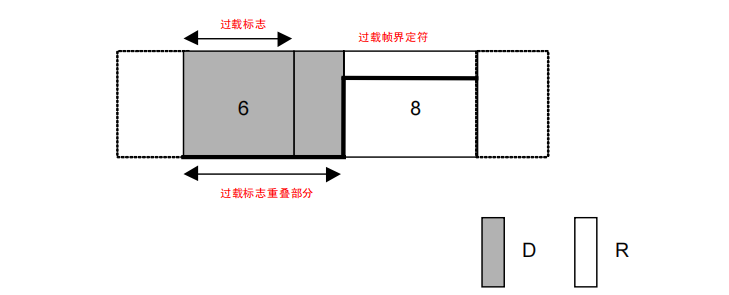
过载帧
过载帧是用于接收单元通知其尚未完成接收准备的帧。过载帧由过载标志和过载界定符构成。
过载帧的构成如图 26 所示。
(1) 过载标志
6 个位的显性位。
过载标志的构成与主动错误标志的构成相同。
(2) 过载界定符
8 个位的隐性位。
过载界定符的构成与错误界定符的构成相同。
帧间隔
帧间隔是用于分隔数据帧和遥控帧的帧。数据帧和遥控帧可通过插入帧间隔将本帧与前面的任何帧(数据帧、
遥控帧、错误帧、过载帧)分开。
过载帧和错误帧前不能插入帧间隔。
帧间隔的构成如图 27 所示。
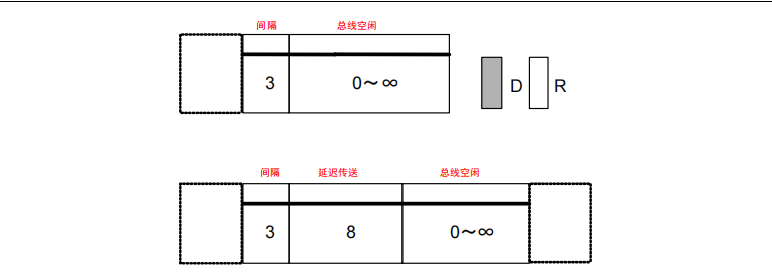
(1) 间隔
3 个位的隐性位。
(2) 总线空闲
隐性电平,无长度限制(0 亦可)。
本状态下,可视为总线空闲,要发送的单元可开始访问总线。
(3) 延迟传送(发送暂时停止)
8 个位的隐性位。
只在处于被动错误状态的单元刚发送一个消息后的帧间隔中包含的段。
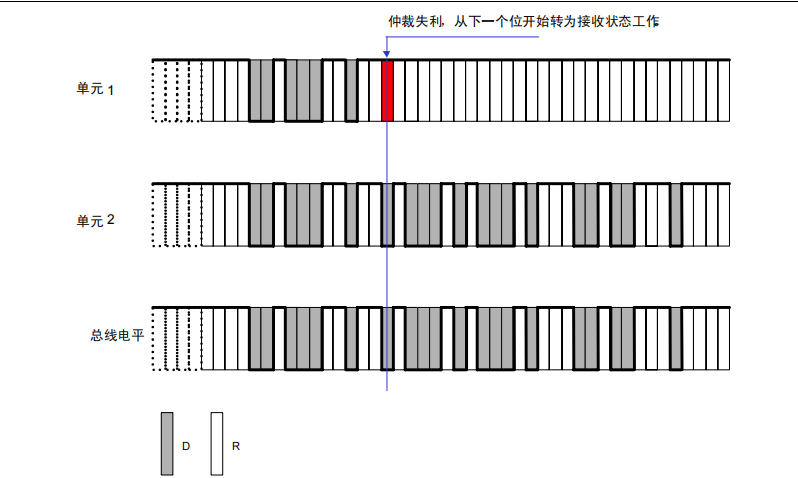
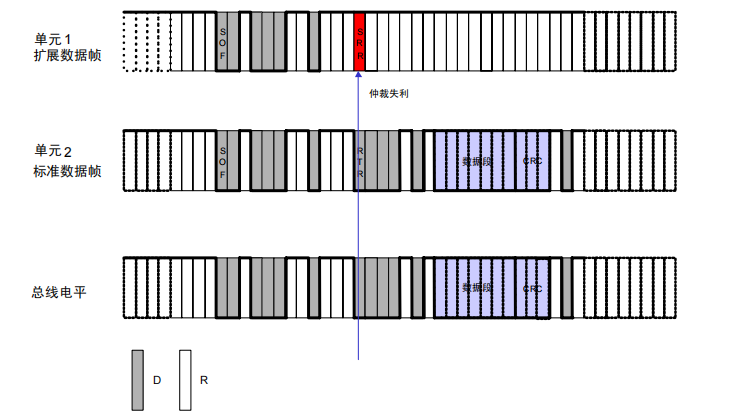
优先级的决定
在总线空闲态,最先开始发送消息的单元获得发送权。
多个单元同时开始发送时,各发送单元从仲裁段的第一位开始进行仲裁。连续输出显性电平最多的单元可继
续发送。
仲裁的过程如图 28 所示。
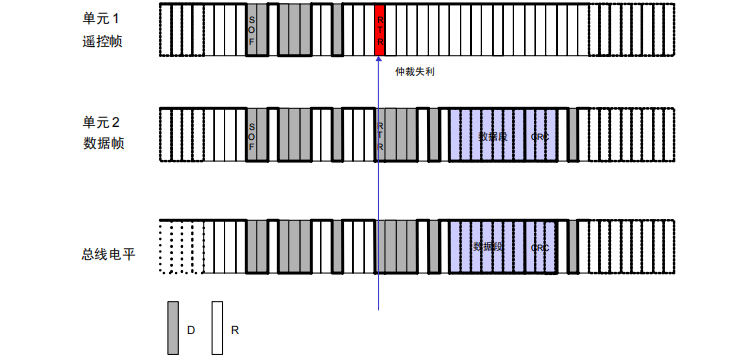
(1)数据帧和遥控帧的优先级
具有相同 ID 的数据帧和遥控帧在总线上竞争时,仲裁段的最后一位(RTR)为显性位的数据帧具有优先权,
可继续发送。
数据帧和遥控帧的仲裁过程如图 29 所示。
(2)标准格式和扩展格式的优先级
标准格式 ID 与具有相同 ID 的遥控帧或者扩展格式的数据帧在总线上竞争时,标准格式的 RTR 位为显性位
的具有优先权,可继续发送。
标准格式和扩展格式的仲裁过程如图 30 所示。
位填充
位填充是为防止突发错误而设定的功能。当同样的电平持续 5 位时则添加一个位的反型数据。
位填充的构成如图 31 所示。
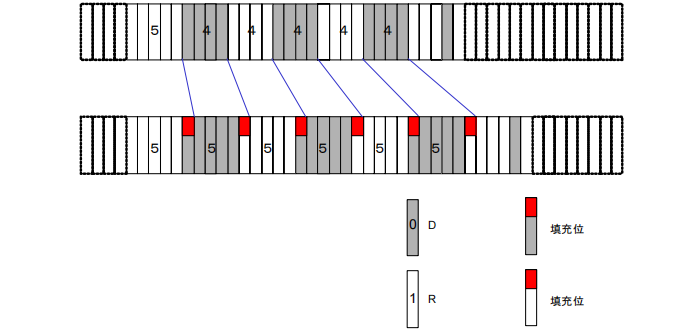
(1) 发送单元的工作
在发送数据帧和遥控帧时,SOF~CRC 段间的数据,相同电平如果持续5位,在下一个位(第6个位)则要插入 1 位与前 5 位反型的电平。
(2) 接收单元的工作
在接收数据帧和遥控帧时,SOF~CRC 段间的数据,相同电平如果持续5位,需要删除下一个位(第6个位)再接收。如果这个第 6 个位的电平与前 5 位相同,将被视为错误并发送错误帧。
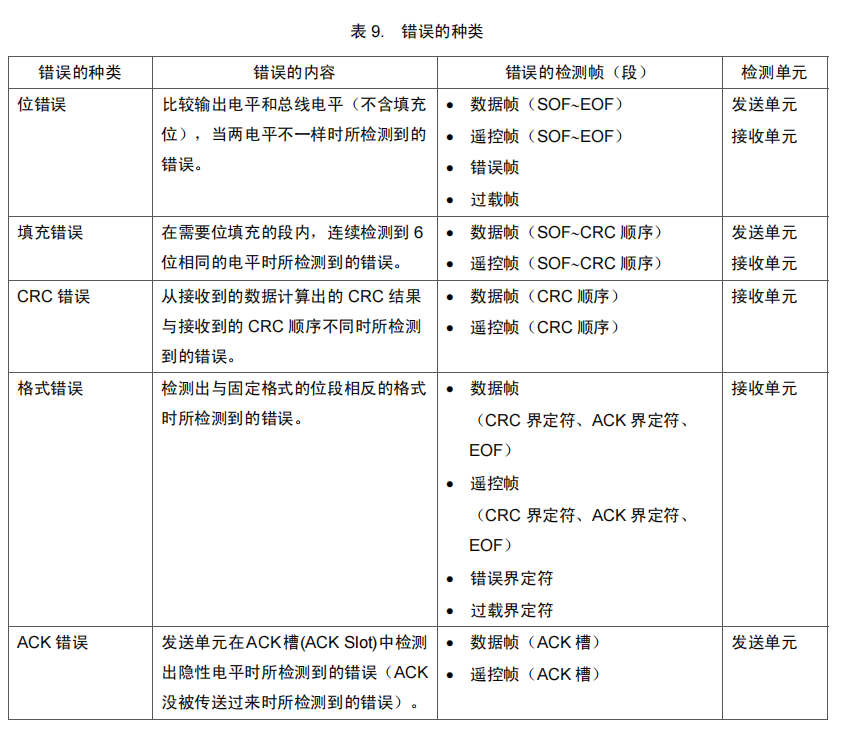
错误的种类
错误共有 5 种。多种错误可能同时发生。
• 位错误
• 填充错误
• CRC 错误
• 格式错误
• ACK 错误
错误的种类、错误的内容、错误检测帧和检测单元如表 9 所示。
错误帧的输出
检测出满足错误条件的单元输出错误标志通报错误。
处于主动错误状态的单元输出的错误标志为主动错误标志;处于被动错误状态的单元输出的错误标志为被动错误标志。
发送单元发送完错误帧后,将再次发送数据帧或遥控帧。
错误标志输出时序如表 10 所示。

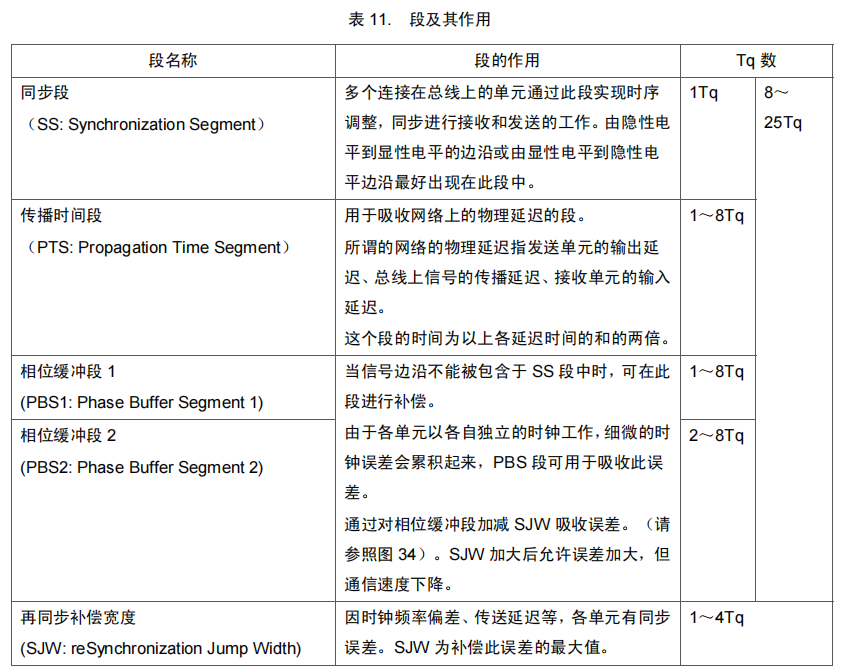
位时序
由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为 4 段。
• 同步段(SS)
• 传播时间段(PTS)
• 相位缓冲段 1(PBS1)
• 相位缓冲段 2(PBS2)
这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成。
1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。
1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可
同时采样,也可任意设定采样点。
各段的作用和 Tq 数如表 11 所示。1 个位的构成如图 32 所示。
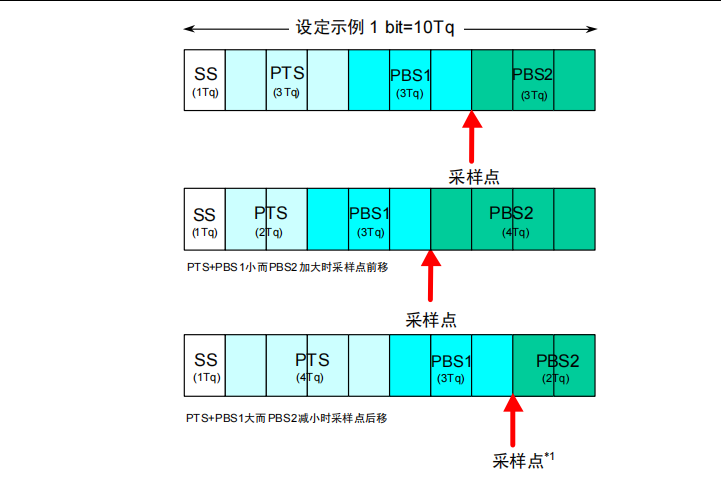
采样点所谓采样点是读取总线电平,并将读到的电平作为位值的点。位置在 PBS1 结束处。
取得同步的方法
CAN 协议的通信方法为 NRZ(Non-Return to Zero)方式。各个位的开头或者结尾都没有附加同步信号。发送单元以与位时序同步的方式开始发送数据。另外,接收单元根据总线上电平的变化进行同步并进行接收工作。
但是,发送单元和接收单元存在的时钟频率误差及传输路径上的(电缆、驱动器等)相位延迟会引起同步偏差。因此接收单元通过硬件同步或者再同步的方法调整时序进行接收。
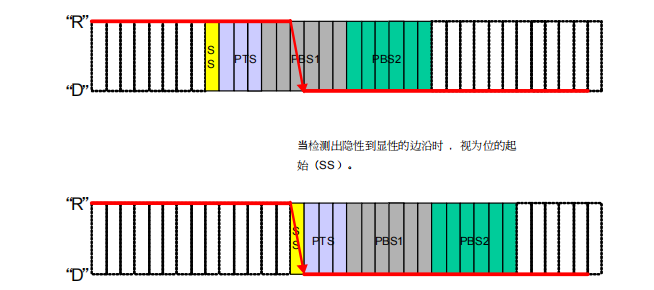
硬件同步
接收单元在总线空闲状态检测出帧起始时进行的同步调整。
在检测出边沿的地方不考虑 SJW 的值而认为是 SS 段。
硬件同步的过程如图 33 所示。
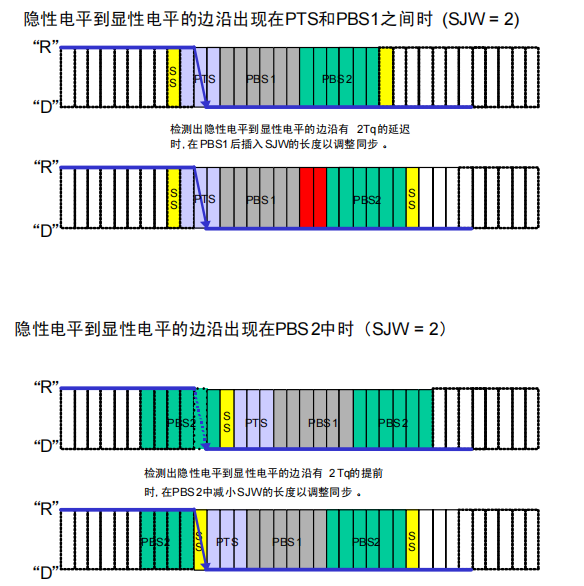
再同步
在接收过程中检测出总线上的电平变化时进行的同步调整。
每当检测出边沿时,根据 SJW 值通过加长 PBS1 段,或缩短 PBS2 段,以调整同步。但如果发生了超出 SJW
值的误差时,最大调整量不能超过 SJW 值。
再同步如图 34 所示。
调整同步的规则
硬件同步和再同步遵从如下规则。
(1) 1 个位中只进行一次同步调整。
(2) 只有当上次采样点的总线值和边沿后的总线值不同时,该边沿才能用于调整同步。
(3) 在总线空闲且存在隐性电平到显性电平的边沿时,则一定要进行硬件同步。
(4) 在总线非空闲时检测到的隐性电平到显性电平的边沿如果满足条件(1)和(2),将进行再同步。但还要
满足下面条件。
(5) 发送单元观测到自身输出的显性电平有延迟时不进行再同步。
(6) 发送单元在帧起始到仲裁段有多个单元同时发送的情况下,对延迟边沿不进行再同步。
参考
https://blog.csdn.net/ZCShouCSDN/article/details/89603298
《CAN 入门书》 作者 瑞萨科技
相关文章:
Can 通信-协议
概述 CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO国际标准化的串行通信协议。 在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统 被开发了出来。由于…...

rustlings本地开发环境配置
克隆自己的仓库 首先我们要在github上找到自己仓库并把它克隆到本地 git clone https://github.com/LearningOS/rust-rustlings-2023-autumn-******.git下载插件 rust-analyzer和Git Graph一个可以用来解析rust代码,另一个可以可视化管理git代码库 下载rustling…...
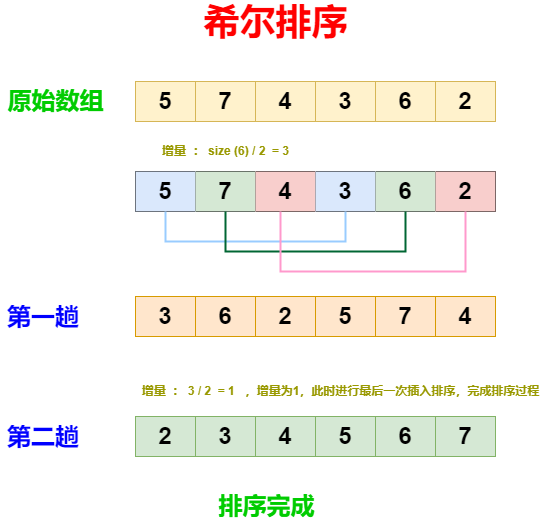
希尔排序:优化插入排序的精妙算法
排序算法在计算机科学中扮演着重要的角色,其中希尔排序(Shell Sort)是一种经典的排序算法。本文将带您深入了解希尔排序,包括其工作原理、性能分析以及如何使用 Java 进行实现。 什么是希尔排序? 希尔排序,…...
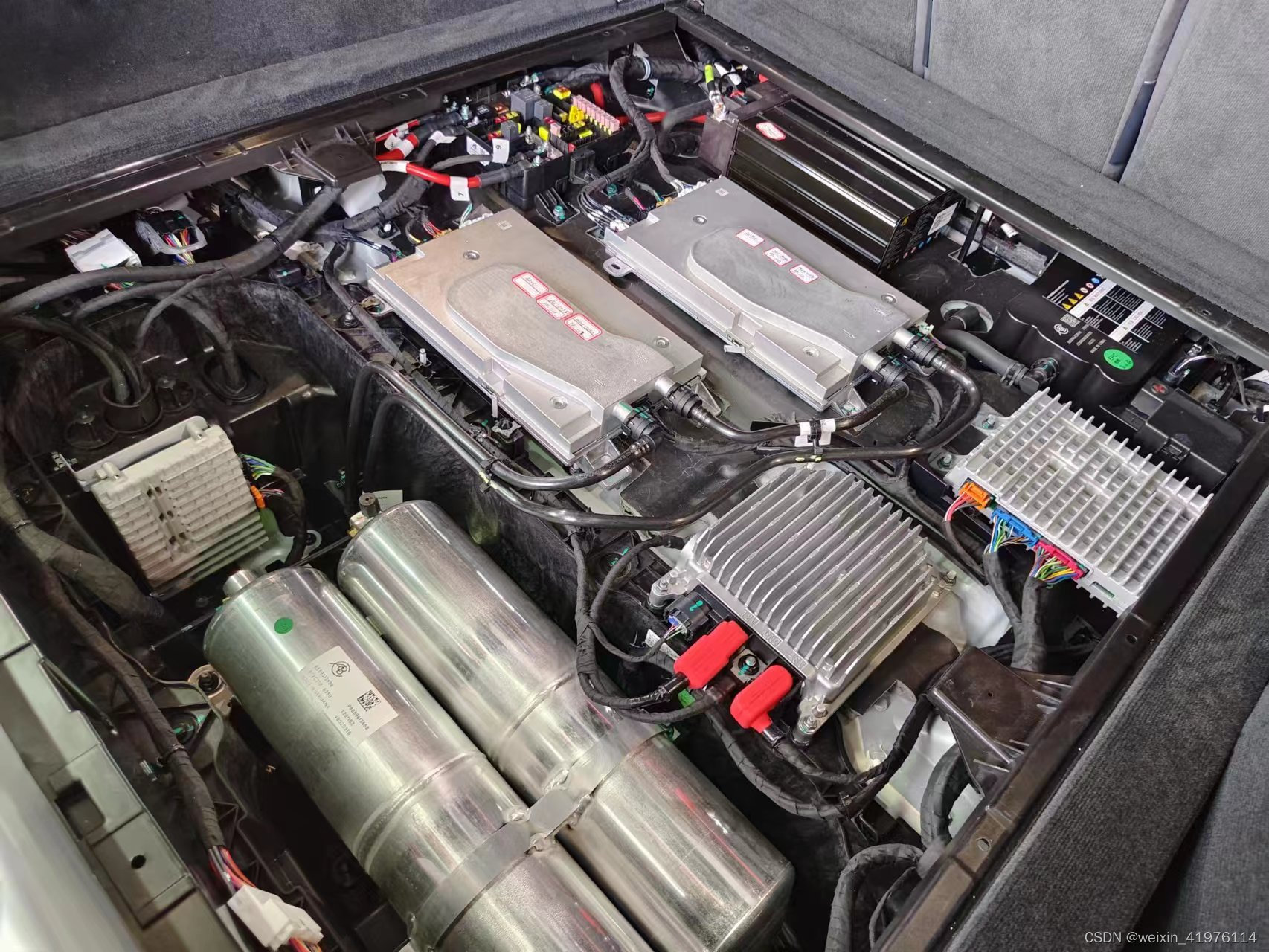
新能源电动汽车安全性能检测中采集车架号及BMS电池数据的难点
按照新能源电动汽车安全性能检测,必须采集到汽车的车架号及BMS电池数据做对应的评测。国内电动汽车主要以比亚迪、特斯拉、广汽埃安、五菱新能源、长安新能源、大众、理想、蔚来、哪吒等主流为主。与传统燃油车不同的是,电动汽车不用执行OBD2标准&#x…...
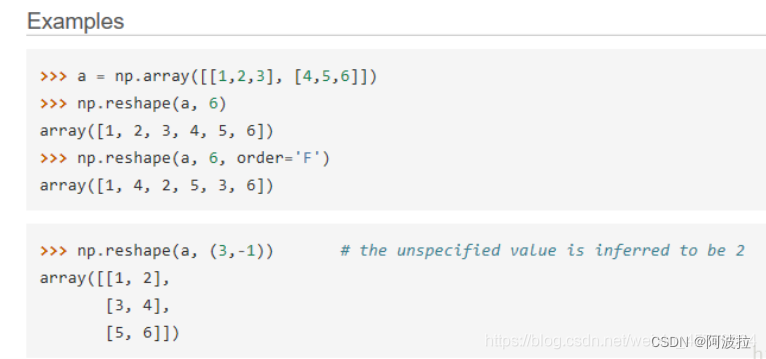
函数reshape(-1,)里的-1的意思
reshape函数是对narray的数据结构进行维度变换,由于变换遵循对象元素个数不变,在进行变换时,假设一个数据对象narray的总元素个数为N,如果我们给出一个维度为(m,-1)时,我们就理解为将…...

名词作形容词的用法
【名词作形容词的用法】 有考英语二的同学问我,为什么名词能修饰名词,比如spending proportion(支出比例), job satisfaction(工作满意度),之前老师不是说这种写法不能乱用么? 那我在这里简单说明一下“形…...
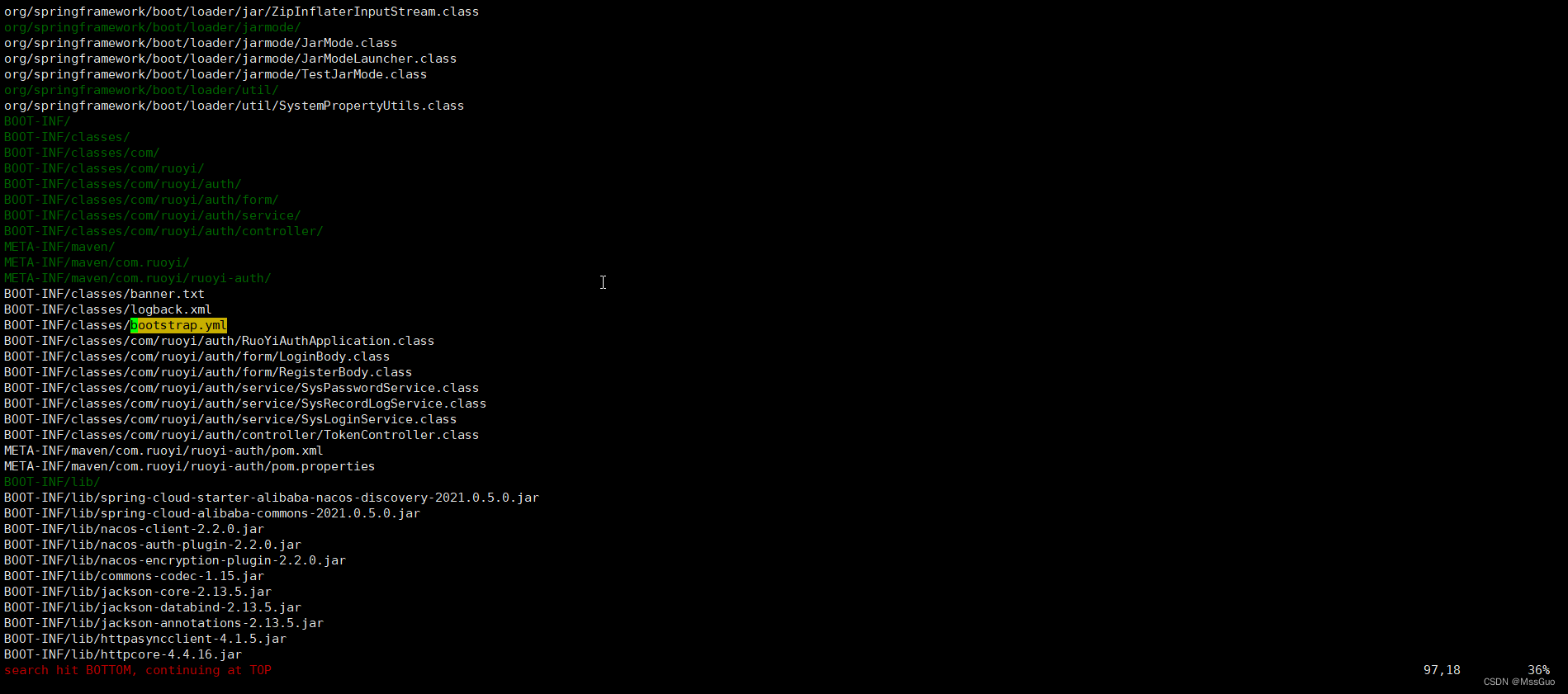
若依微服务部署,裸服务部署、docker部署、k8s部署
目录 前言windows 部署若依-微服务版本浏览器验证docker部署若依-微服务版本浏览器验证k8s部署若依-微服务版本浏览器验证总结 前言 环境:centos7、Win10 若依是一个合适新手部署练习的开源的微服务项目,本篇讲解Windows部署若依微服务、docker部署若依…...
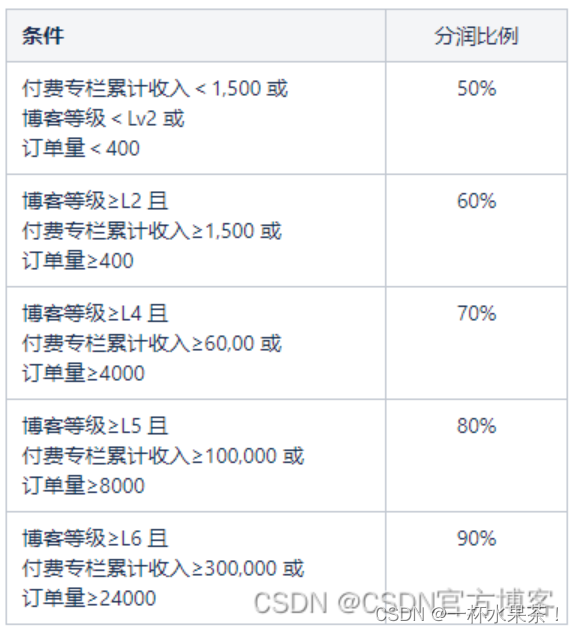
【置顶】关于博客的一些公告
所谓 万事开头难,最开始的两个专栏 《微机》 和 《骨骼动作识别》 定价 29.9 ,因为: 刚开始确实比较困难,要把自己学的知识彻底搞懂讲给别人,还要 码字排版,从 Markdown 语法开始学起(这都是 花…...

Fastadmin后端表格动态展示列
前言 后端有多角色时, 往往有些表格中的列需要根据条件来根据角色身份决定是不是需要该角色查看, 为此就衍生出一个需要动态控制展示某列的需求fastadmin框架内调用的table实际上在初始化时, 可以修改columns中的visible属性来控制是否显示, 但是这个参数只能传入bool, 不能像…...

如何在ubnutu上安装docker
卸载旧版本 sudo apt-get remove docker docker-engine docker.io添加HTTPS传输软件包以及CA证书 sudo apt-get update sudo apt-get install \apt-transport-https \ca-certificates \curl \gnupg \lsb-release添加国内源以提升网速 添加软件源的GPG秘钥以确认所下载软件包…...
Mall脚手架总结(三) —— MongoDB存储浏览数据
前言 通过Elasticsearch整合章节的学习,我们了解SpringData框架以及相应的衍生查询的方式操作数据读写的语法。MongoDB的相关操作也同样是借助Spring Data框架,因此这篇文章的内容比较简单,重点还是弄清楚MongoDB的使用场景以及如何通过Sprin…...
Maven 引入外部依赖
如果我们需要引入第三方库文件到项目,该怎么操作呢? pom.xml 的 dependencies 列表列出了我们的项目需要构建的所有外部依赖项。 要添加依赖项,我们一般是先在 src 文件夹下添加 lib 文件夹,然后将你工程需要的 jar 文件复制到 …...

BS EN 12104-2023 软木地砖检测
软木地砖是指含有烧结成分的软木制成的块状砖,可用于地面覆盖物,装饰层等,具有脚感柔软舒适,防滑性能好,静音等性能,同时也其耐磨性较差,不易清洁。 BS EN 12104-2023软木地砖测试 测试项目 测…...
用Nginx搭建一个可用的静态资源Web服务器
sudo wget http://dlib.net/files/dlib-19.24.tar.bz2下载需要的文件。 sudo tar jxf dlib-19.24.tar.bz2进行解压。 sudo mkdir /nginx/dlib在nginx安装目录/nginx创建一个新的目录dlib。 配置文件nginx.conf里边的内容如下: worker_processes 1; events {…...
MAX30102心率血氧传感器
MAX30102心率血氧传感器介绍 背景基本功能基本结构基本原理采集方法直通式采集方法反射式采集方法 血氧采集原理Beer-Lambert 定理皮肤组织模型血氧测量过程AC / DC 的计算 心率采集原理 实验结果代码走读资源链接 背景 目前,基本上所有的可穿戴式设备都集成了心率…...
高效解决 TypeError : ‘ numpy._DTypeMeta‘ object is not subscriptable 问题
文章目录 问题描述解决问题 问题描述 解决问题 参考博文 打开报错位置 AppData\Roaming\Python\Python39\site-packages\cv2\typing\ 添加single-quotes,即单引号 博主说The trick is to use single-quotes to avoid the infamous TypeError: ‘numpy._DTypeMeta’…...
)
Hadoop作业篇(一)
一、选择题 1. 以下哪一项不属于Hadoop可以运行的模式__C____。 A. 单机(本地)模式 B. 伪分布式模式 C. 互联模式 D. 分布式模式 C. 互联模式 不属于Hadoop可以运行的模式。 Hadoop主要有四种运行模式: A. 单机(本地…...
)
SpringCloud中的分布式锁用法详解(Java+Redis SETNX命令)
前言: 在分布式系统中,保证数据的一致性和并发控制是至关重要的。分布式锁能够解决多个进程/线程同时访问共享资源的问题,确保只有一个进程/线程能够获得锁。本文将介绍如何使用Java和Redis实现分布式锁,并提供示例代码和注意事项…...

初学者如何选择:前端开发还是后端开发?
#开发做前端好还是后端好【话题征文】# 作为一名有多年开发经验的过来人,我认为前端开发和后端开发都有其独特的魅力和挑战。下面我将就我的个人经历和观点来分享一些关于前端开发和后端开发的看法。 首先,让我们将编程世界的大城市比作前端开发和后端开…...

从php页面插入MySQL的数据变为乱码如何解决?
在 PHP 页面中向 MySQL 数据库插入数据时,如果数据出现乱码,可能是因为字符集设置不正确或者字符编码不匹配。 数据库字符集设置不正确: 确保数据库的字符集设置与您的应用程序所使用的字符集一致。通常情况下,UTF-8 是一个通用的…...

告别玄学:给STM32/CH32V的SD卡SPI驱动加上超时、重试与状态机
从零构建工业级SD卡SPI驱动:超时重试与状态机设计实战 在嵌入式系统中,SD卡作为可靠的大容量存储介质被广泛应用。然而许多开发者都经历过这样的困境:实验室测试完美的SD卡驱动,一旦部署到真实环境中就频繁出现读写失败、卡死甚至…...

Minecraft服务器技能数据自动化管理:mcpskills-cli命令行工具实战指南
1. 项目概述与核心价值 最近在折腾一些Minecraft服务器的自动化管理,发现很多重复性的技能配置、权限同步工作特别耗时。手动去游戏里敲指令,或者对着配置文件一条条改,效率低还容易出错。就在这个当口,我发现了 alibiinformatio…...

使用git filter-repo删除已提交到git中的敏感信息,api key,配置文件等
使用git filter-repo删除已提交到git中的敏感信息,api key,配置文件等 前提条件 Python 3.5 git > 2.22.0通过 pip 安装:pip install git-filter-repo 注意事项 官方推荐在fresh clone上修改,即clone一份远程的再做修改 操作后…...

大语言模型对抗性攻击与防御:Decepticon框架原理与实践
1. 项目概述:当AI学会“伪装”,一场攻防博弈的新范式最近在安全圈和AI研究领域,一个名为“Decepticon”的项目引起了我的注意。这个项目来自PurpleAILAB,名字本身就充满了对抗的意味——“Decepticon”直译是“霸天虎”࿰…...

DeepSeek在MMLU基准测试中狂揽86.7分:这3个被99%开发者忽略的推理优化技巧,立竿见影!
更多请点击: https://intelliparadigm.com 第一章:DeepSeek在MMLU基准测试中狂揽86.7分:技术突破与行业意义 DeepSeek-V3 在涵盖57个学科领域的MMLU(Massive Multitask Language Understanding)基准测试中取得86.7%的…...

危化园区 ReID 跨镜管控难,镜像视界无感定位筑牢安全防线
危化园区 ReID 跨镜管控难,镜像视界无感定位筑牢安全防线危化工业园区作为化工生产、仓储、运输的核心载体,承载着易燃易爆、有毒有害等高危物料的全流程作业,其安全管控水平直接关系到人员生命安全、财产安全与生态环境安全。不同于普通工业…...

Mastra AI编排框架:构建生产级智能工作流的完整指南
1. 项目概述:一个面向开发者的AI应用编排框架最近在折腾AI应用开发的朋友,估计都绕不开一个核心痛点:如何把不同的AI模型、工具和数据源高效地串联起来,形成一个稳定、可维护的智能工作流。无论是想做个智能客服,还是搞…...

OpenCV 4.x/5.x 在Ubuntu 22.04上安装后,CMake项目死活找不到库?一个环境变量就搞定
OpenCV 4.x/5.x 在Ubuntu 22.04上安装后CMake项目找不到库的终极解决方案 当你满怀期待地在Ubuntu 22.04上安装了最新版的OpenCV,准备开始你的计算机视觉项目时,却遭遇了CMake无法找到OpenCV库的尴尬局面。这种"明明安装了却找不到"的情况&…...
)
NotebookLM+人类学工作流重构:3类濒危语言档案处理实录(附可复用知识图谱架构)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM人类学研究辅助 NotebookLM 是 Google 推出的基于 LLM 的研究型笔记工具,其核心能力在于对用户上传的私有文档(如田野笔记、访谈转录稿、民族志手稿、考古报告 PDF 等…...

国省考备考常见 10 大误区 上岸考生总结
作为上岸过来人,我太懂 “努力却没结果” 的无力。其实公考失败,大多不是不够努力,而是踩了本可以避开的坑。这 10 条避坑指南,覆盖备考方向、复习方法、心态调整,全是实战总结的干货,帮备考的你少走弯路。…...