opencv图像卷积操作和常用的图像滤波函数
文章目录
- opencv图像卷积操作原理,opencv中常用的图像滤波函数
- 一、图像卷积操作原理:
- 1、卷积操作原理图:
- 二、opencv常用的图像滤波函数:这些函数的主要作用是对图像进行平滑处理或去除噪声(核心目的是减少图像中的噪声,使图像变得更加平滑);
- 1、cv::blur()函数:英文全拼blur
- (1)函数原型:
- (2)代码示例:
- 2、cv::boxFilter()函数:
- (1)函数原型:
- (2)cv.blur() 均值滤波器与cv.boxFilter() 方框滤波器的区别:
- 核的定义:
- 参数不同:
- 功能略有差异:
- 总结:
- (3)代码示例:
- 3、cv::GuassianBlur()函数:
- (1)函数原型:
- (2)代码示例:
- 4、cv::medianBlur()函数:
- (1)函数原型:
- (2)代码示例:
- 5、cv::bilateralFilter()函数:
- (1)函数原型:
- (2)代码示例:
- 6、cv2::filter2D()函数:
- (1)函数原型:
- (2)代码示例:
opencv图像卷积操作原理,opencv中常用的图像滤波函数
一、图像卷积操作原理:
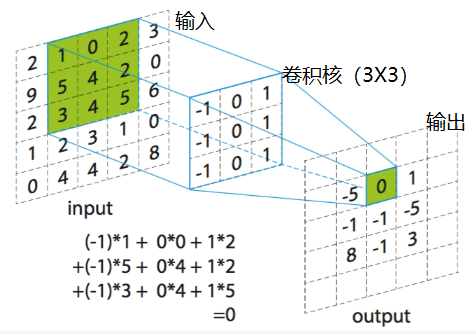
卷积是图像处理中常用的操作之一,它通过在图像上滑动一个滤波器(也称为卷积核)来实现对图像的处理,每个滤波器(卷积核)都是一个小的矩阵,它包含一组权重值;
1、卷积操作原理图:
- 将滤波器(卷积核)与图像的一个小区域相乘;
- 将得到的乘积相加,得到一个新的像素值;
- 通过不断滑动滤波器(卷积核),对整幅图像进行处理,从而得到一幅经过卷积操作的图像;
计算过程图:
二、opencv常用的图像滤波函数:这些函数的主要作用是对图像进行平滑处理或去除噪声(核心目的是减少图像中的噪声,使图像变得更加平滑);
1、cv::blur()函数:英文全拼blur
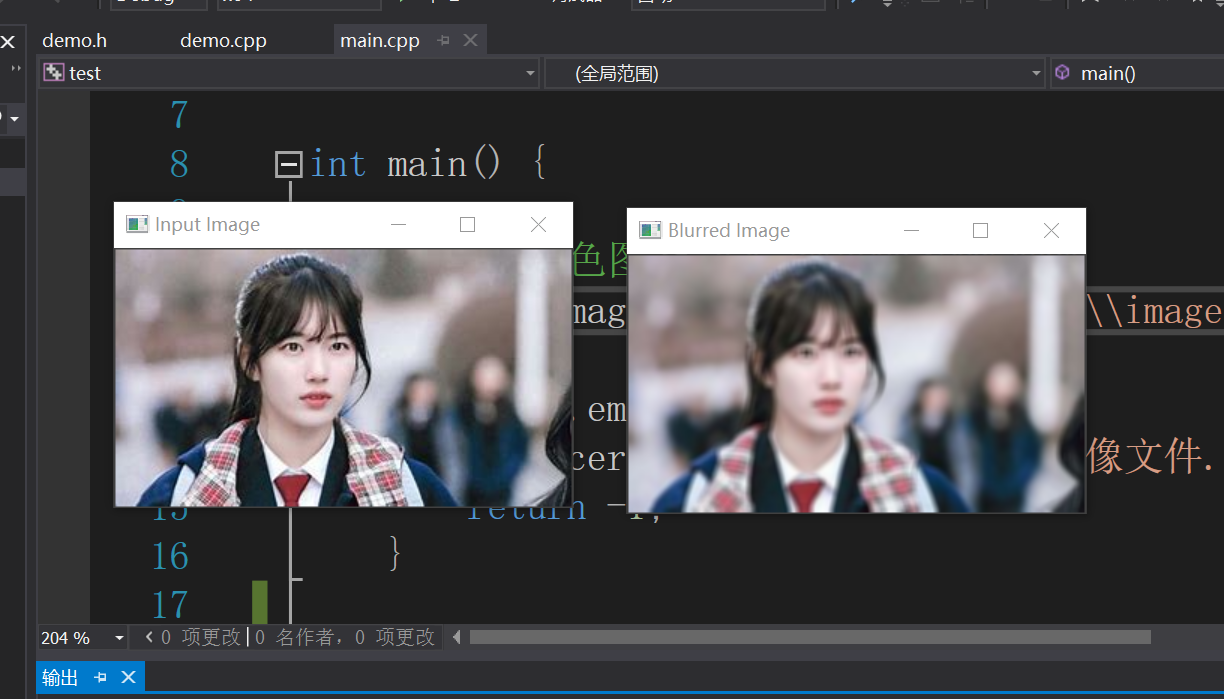
均值滤波器(平均滤波器),用于图像模糊(平滑)处理的函数,它将图像中的每个像素值替换为其周围像素值的平均值,从而实现图像的模糊效果;
(1)函数原型:
void cv::blur(InputArray src, OutputArray dst, Size ksize, Point anchor = Point(-1,-1), int borderType = BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像;
ksize:卷积核,用cv::Size(width, height)来指定,例如(3,3)表示一个3x3的卷积核,通常使用奇数大小的核;
anchor:锚点,默认为卷积核的中心,默认值Point(-1, -1);
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat image = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (image.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;cv::Size kernelSize(5, 5);cv::blur(image, outputImage, kernelSize);cv::imshow("Input Image", image);cv::imshow("Blurred Image", outputImage);cv::waitKey(0);return 0;}运行结果:
2、cv::boxFilter()函数:
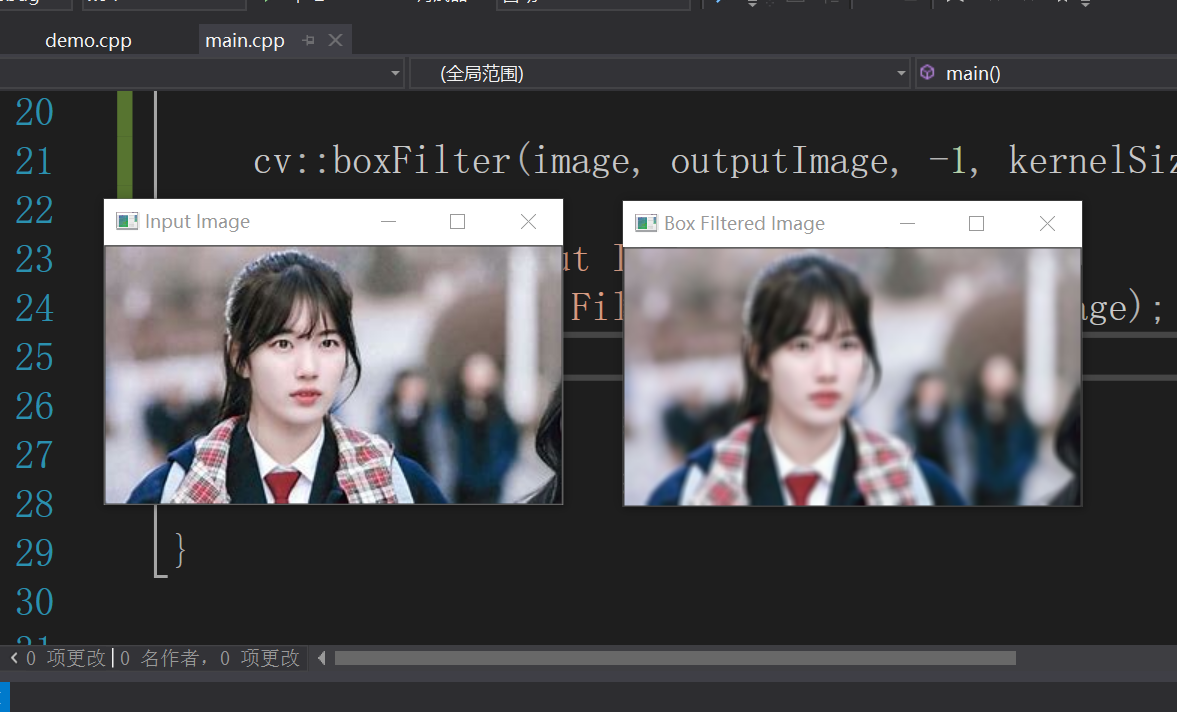
方框滤波器(均值滤波器的一种变体),方框滤波器与均值滤波器类似,通过计算图像中每个像素周围邻域像素的加权平均值来减少噪声,但相比
cv::blur(),cv::boxFilter()可以指定不同的归一化方式;
(1)函数原型:
void cv::boxFilter(cv::InputArray src,cv::OutputArray dst,int ddepth,cv::Size ksize,cv::Point anchor = cv::Point(-1,-1),bool normalize = true,int borderType = cv::BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ddepth:输出图像的深度,通常使用-1表示与输入相同;
ksize:卷积核,用cv::Size(width, height)来指定,例如(3,3)表示一个3x3的卷积核,通常使用奇数大小的核;
anchor:锚点,默认为卷积核的中心,默认值Point(-1, -1);
normalize:是否对结果进行归一化,默认为true;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)cv.blur() 均值滤波器与cv.boxFilter() 方框滤波器的区别:
cv::blur()和cv::boxFilter()都是用于图像平滑处理的滤波器,它们的核心目的是减少图像中的噪声,使图像变得更加平滑;
核的定义:
- cv::blur() 的核是一个归一化的平均核,也就是说核内所有元素的和为1(这表示在滤波过程中,像素值被取平均值);
- cv::boxFilter() 的核不一定是归一化的,可以通过 normalize 参数控制是否归一化(这使得方框滤波器可以对像素进行加权平均);
参数不同:
- cv::blur() 接受一个 cv::Size 参数作为核的大小,通常使用奇数大小的核;
- cv::boxFilter() 接受一个整数参数作为核的大小,可以使用偶数大小的核;
功能略有差异:
- 由于 cv::boxFilter() 可以选择是否归一化,因此它可以用于一些特殊情况下的平滑处理,比如图像锐化;
- cv::blur() 更适合通用的平滑处理;
总结:
总的来说,这两个函数都可以用于图像平滑处理,选择使用哪个取决于你的具体需求以及想要实现的效果,如果你只是需要一个简单的平滑处理,通常使用 cv::blur() 就足够了,如果你需要更多的控制,或者想要尝试一些特殊的滤波效果,可以考虑使用 cv::boxFilter();
(3)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat image = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (image.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;cv::Size kernelSize(5, 5);cv::boxFilter(image, outputImage, -1, kernelSize);cv::imshow("Input Image", image);cv::imshow("Box Filtered Image", outputImage);cv::waitKey(0);return 0;}
运行结果:
3、cv::GuassianBlur()函数:
高斯滤波器,对输入图像中的每个像素施加一个高斯函数作为权重,从而实现平滑处理,通过应用高斯滤波器来减少图像中的噪声,会较明显地模糊边缘;
(1)函数原型:
void cv::GaussianBlur(cv::InputArray src, cv::OutputArray dst, cv::Size ksize, double sigmaX, double sigmaY = 0, int borderType = cv::BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ksize:卷积核,用cv::Size(width, height)来指定,例如(3,3)表示一个3x3的卷积核,通常使用奇数大小的核;
sigmaX:X方向的高斯核标准差;
sigmaY:Y方向的高斯核标准差,如果为零则默认与sigmaX相同;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;cv::Size kernelSize(5, 5);double sigmaX = 1.5;cv::GaussianBlur(inputImage, outputImage, kernelSize, sigmaX);cv::imshow("Input Image", inputImage);cv::imshow("Gaussian Blurred Image", outputImage);cv::waitKey(0);return 0;}运行结果:

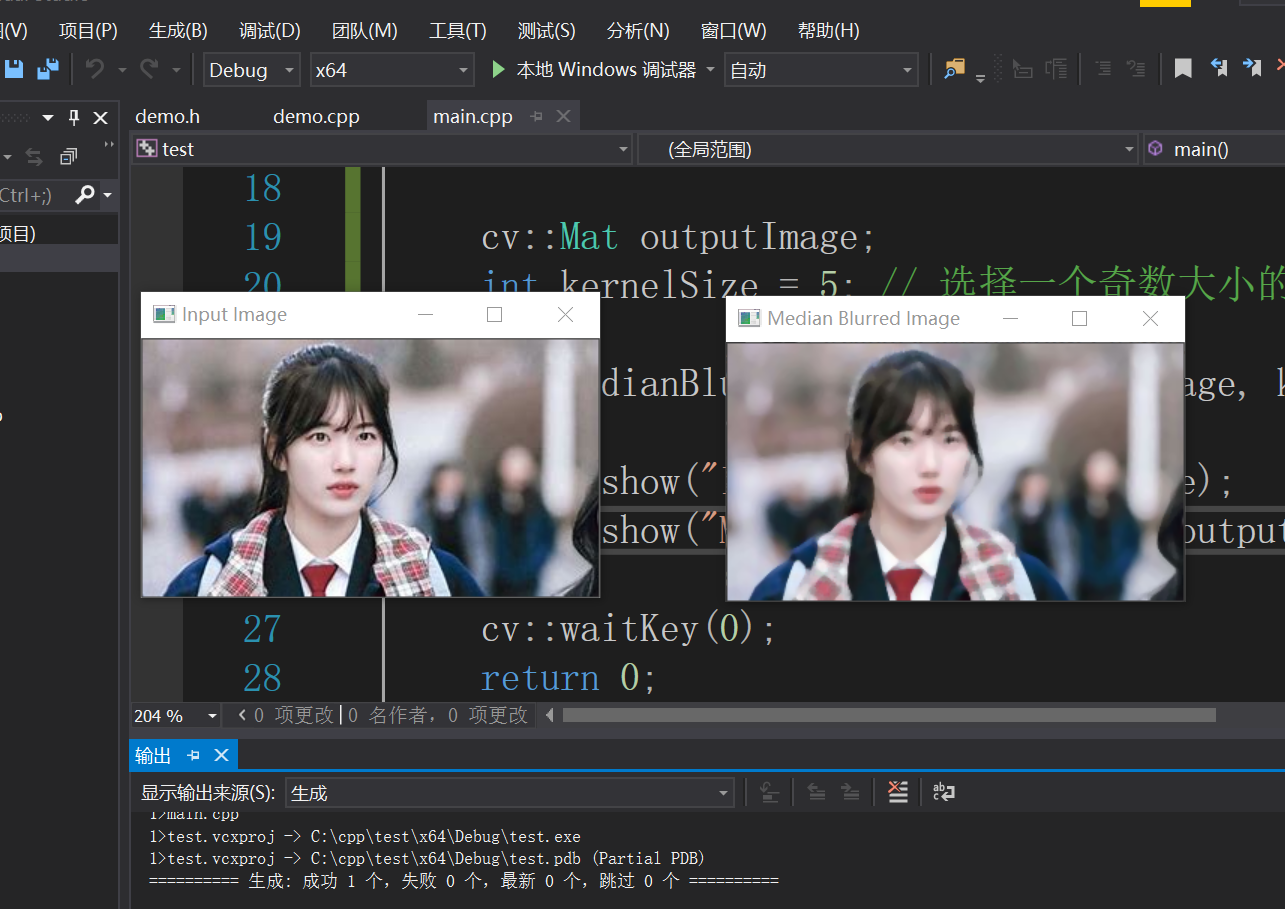
4、cv::medianBlur()函数:
中值滤波器,对输入图像进行平滑处理,通过用邻域像素的中值来替代当前像素的值,从而减少图像中的噪声,是一种常用于去除图像中的椒盐噪声(salt-and-pepper noise)的非线性滤波器;
(1)函数原型:
void cv::medianBlur(cv::InputArray src, cv::OutputArray dst, int ksize
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ksize:卷积核,通常为奇数,用cv::Size(width, height)来指定,通常使用奇数大小的核;(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;int kernelSize = 5; // 选择一个奇数大小的核cv::medianBlur(inputImage, outputImage, kernelSize);cv::imshow("Input Image", inputImage);cv::imshow("Median Blurred Image", outputImage);cv::waitKey(0);return 0;}运行结果:
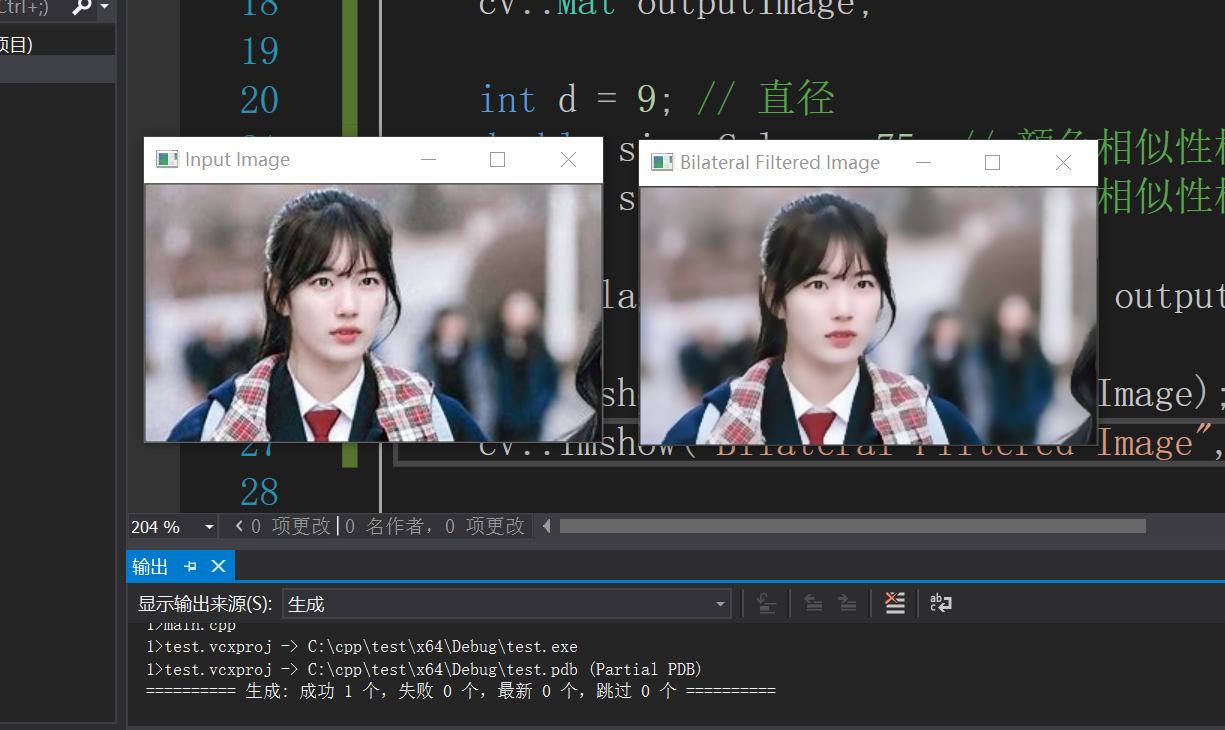
5、cv::bilateralFilter()函数:
双边滤波器,双边滤波器顾名思义比高斯滤波多了一个高斯方差sigma-d,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素值,这样就保证了边缘附近像素值的保存;
(1)函数原型:
void cv::bilateralFilter(cv::InputArray src, cv::OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType = cv::BORDER_DEFAULT
);参数解释:src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
d:控制在颜色空间中滤波器的直径,通常在3-5之间;
sigmaColor:控制颜色相似性的标准差,值越大,颜色差异越大;
sigmaSpace:控制空间相似性的标准差,值越大,范围内像素权重越大;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;int d = 9; // 直径double sigmaColor = 75; // 颜色相似性标准差double sigmaSpace = 75; // 空间相似性标准差cv::bilateralFilter(inputImage, outputImage, d, sigmaColor, sigmaSpace);cv::imshow("Input Image", inputImage);cv::imshow("Bilateral Filtered Image", outputImage);cv::waitKey(0);return 0;}运行结果:
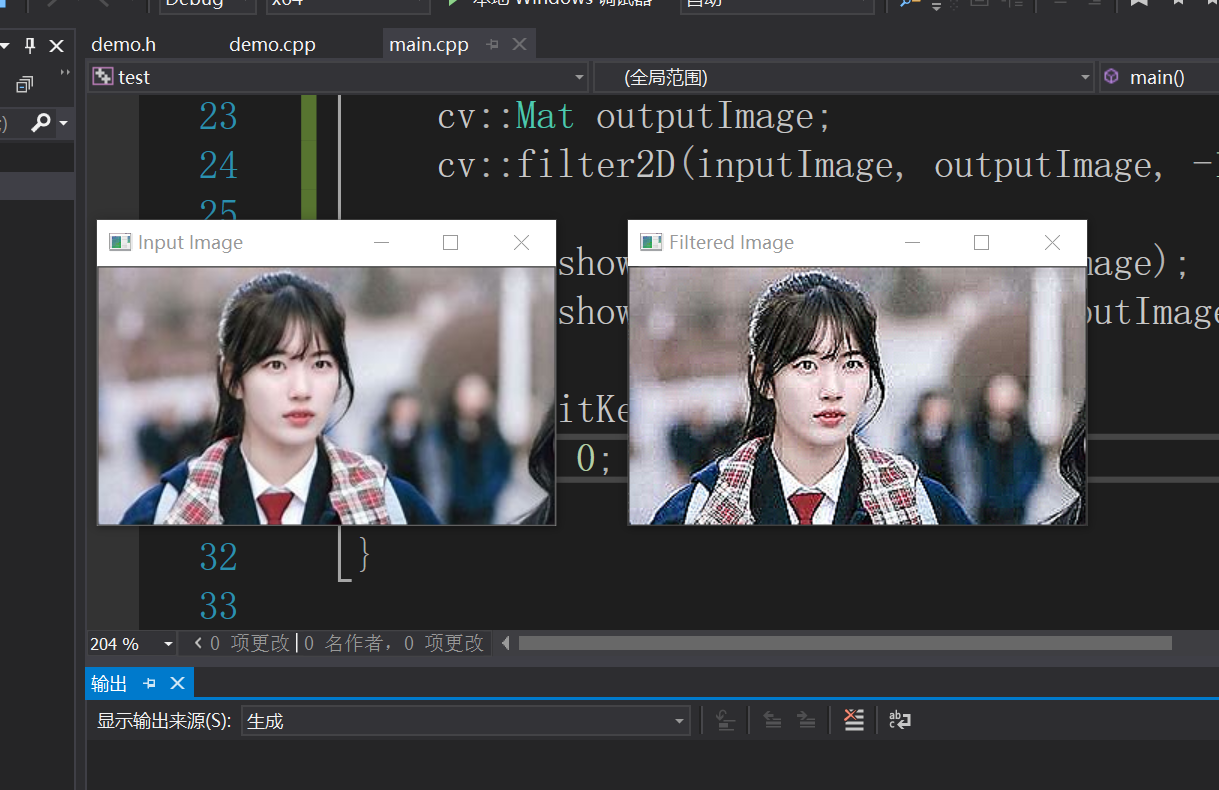
6、cv2::filter2D()函数:
对输入图像进行二维卷积操作,通过将一个核应用于图像的每个像素,从而实现特定的图像处理效果,如边缘检测、模糊等;
(1)函数原型:
void cv::filter2D(cv::InputArray src, cv::OutputArray dst, int ddepth, cv::InputArray kernel, cv::Point anchor = cv::Point(-1,-1),double delta = 0, int borderType = cv::BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ddepth:输出图像的深度,通常使用-1表示与输入相同;
kernel:卷积核,用于定义卷积操作的权重矩阵;
anchor:锚点,默认为卷积核的中心,默认值Point(-1, -1);
delta:可选参数,用于调节卷积结果的偏移值,默认为0;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat kernel = (cv::Mat_<float>(3, 3) <<0, -1, 0,-1, 5, -1,0, -1, 0);cv::Mat outputImage;cv::filter2D(inputImage, outputImage, -1, kernel);cv::imshow("Input Image", inputImage);cv::imshow("Filtered Image", outputImage);cv::waitKey(0);return 0;}运行结果:
相关文章:
opencv图像卷积操作和常用的图像滤波函数
文章目录 opencv图像卷积操作原理,opencv中常用的图像滤波函数一、图像卷积操作原理:1、卷积操作原理图: 二、opencv常用的图像滤波函数:这些函数的主要作用是对图像进行平滑处理或去除噪声(核心目的是减少图像中的噪声࿰…...
习题1. 31
话不多说 先上代码 (defn product [ term a nxt b](defn iter [a result](if (> a b)1 (* (term a) (iter (nxt a) result))))(iter a 1)) 跟习题1.30比较起来,就是两个地方不同 乘法不能乘0 必须是1。难度来讲,跟1.30难度是一样的。增加了迭代过…...

见微知著:从企业售后技术支持看云计算发展
作者:余凯 售后业务中的细微变化 作为阿里云企业容器技术支持的一员,每天会面对全球各地企业级客户提出的关于容器的各种问题,通过这几年的技术支持的经历,逐步发现容器问题客户的一些惯性,哪些是重度用户࿰…...
C++笔记之如何给 `const char*` 类型变量赋值
C笔记之如何给 const char* 类型变量赋值 code review! 文章目录 C笔记之如何给 const char* 类型变量赋值1.在C中,如果你要给一个 const char* 变量赋值,你通常有几种方法来做这件事,具体取决于你的需求。下面是一些常见的方法:…...
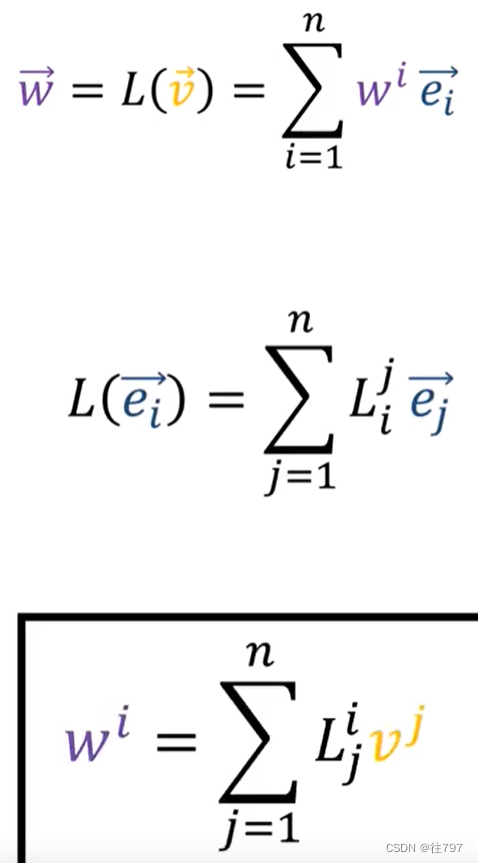
9.Linear Maps
线性映射 线性映射是将向量作为输入并产生一些新向量作为输出的转换。 从坐标定义开始(数组),再到2,3,并展示它们是如何关联的 线性映射的坐标表示最终是矩阵, 1.坐标定义(数组) 列向量是向量的坐标表示…...

大数据Doris(十):添加BE步骤
文章目录 添加BE步骤 一、使用mysql连接 二、添加be...

Vue2 +Element UI 表格行合并
如果相邻数据是一致的,则单元格的行合并,指定需要合并的列,下面我是指定合并了分类和类型这两列。 先看效果 Element UI为我们的<el-table>提供了一个属性span-method:合并行或列的计算方法 下面是一个示例: html部分 - 主要是在表上指…...

SuperEdge易学易用系列-一键搭建SuperEdge集群
条件说明: 系统 公网IP 内网IP 服务器所在地 K8S版本 Centos7.9 114.116.101.254 192.168.0.245 北京 v1.22.6 Centos7.9 119.8.1.96 192.168.0.83 香港 v1.22.6 Ubuntu22 94.74.108.152 192.168.0.154 纽约 v1.22.6 1. 开始部署 1.1 两条指令从零搭建一个边缘集…...
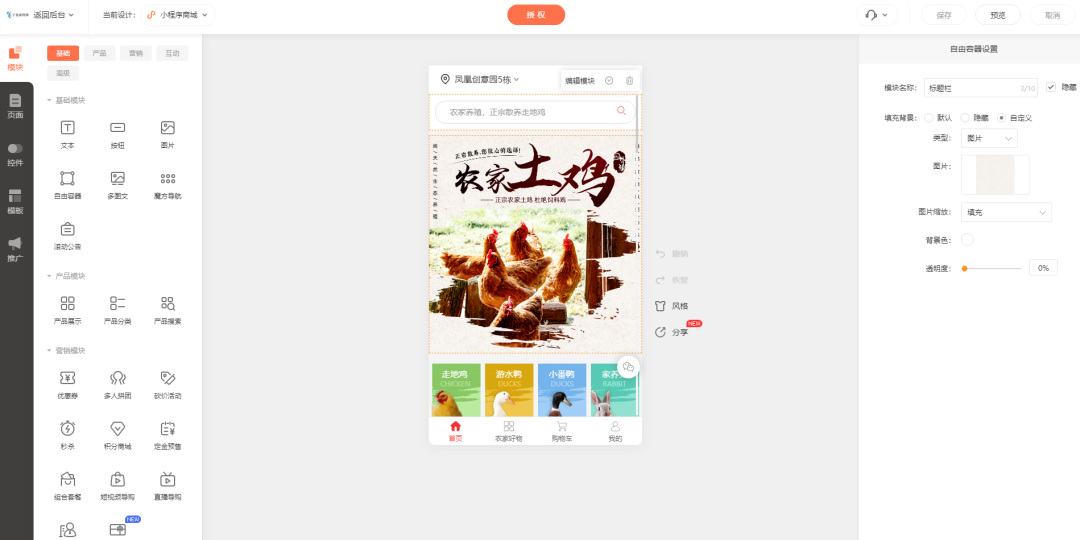
农场养殖农产品商城小程序搭建
鸡鸭羊牛鱼养殖用户不少,其规模也有大有小,尤其对一些生态养殖企业,其产品需求度更高,同时他们也有实际的销售需求。 由于具备较为稳定的货源,因此大规模多规格销售属性很足。 通过【雨科】平台搭建农场养殖商城&…...
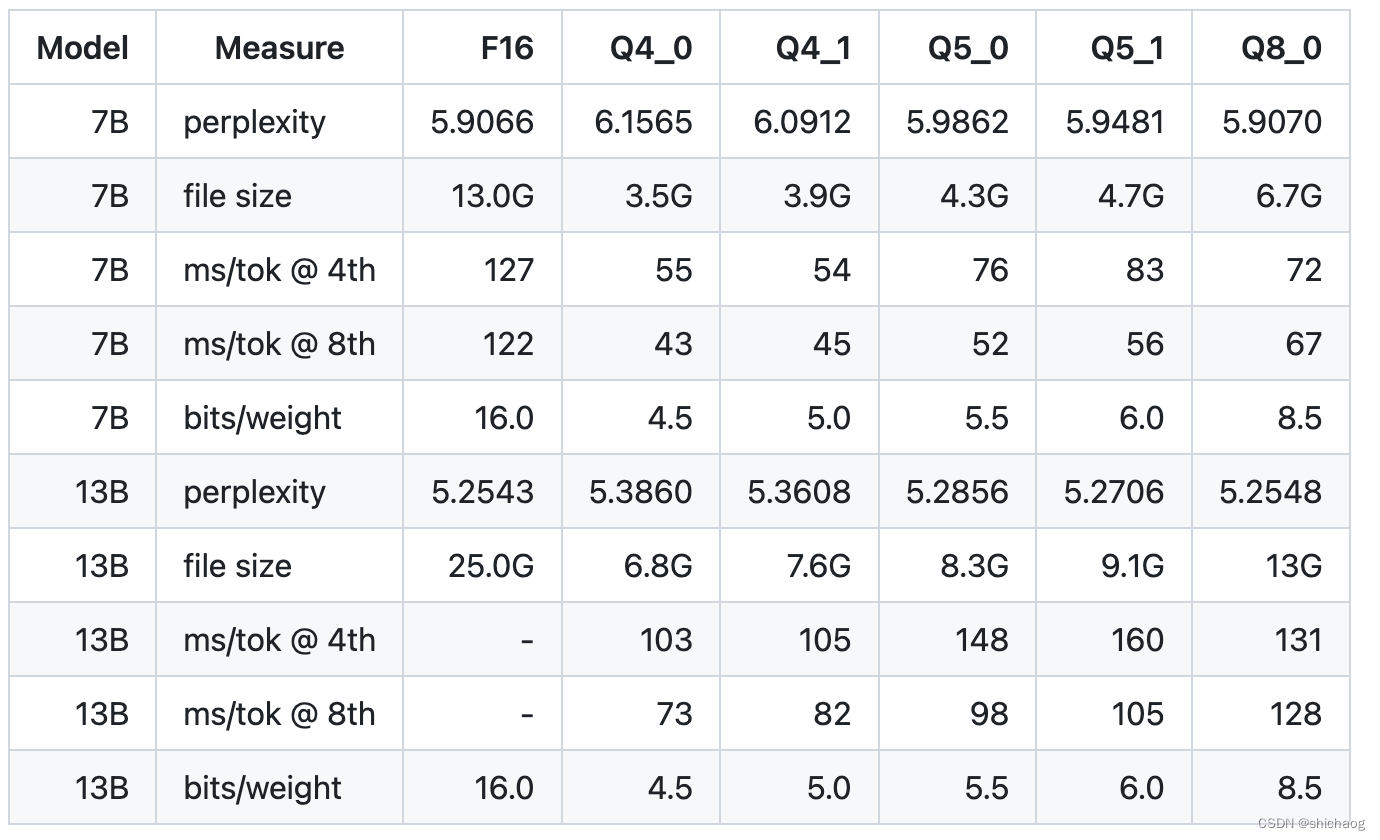
大语言模型之十七-QA-LoRA
由于基座模型通常需要海量的数据和算力内存,这一巨大的成本往往只有巨头公司会投入,所以一些优秀的大语言模型要么是大公司开源的,要么是背后有大公司身影公司开源的,如何从优秀的开源基座模型针对特定场景fine-tune模型具有广大的…...
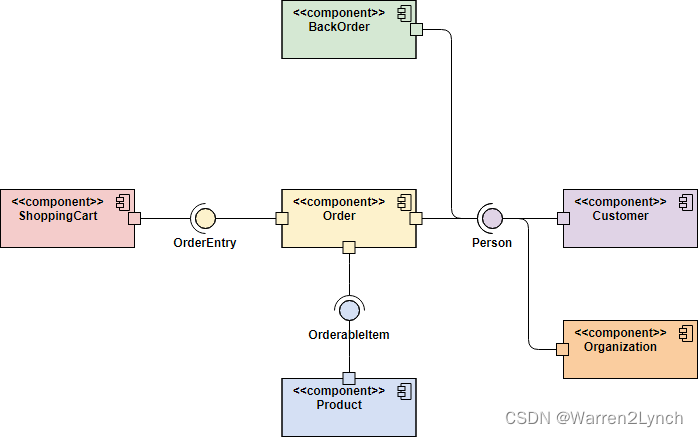
UML组件图综合指南:设计清晰、可维护的软件系统
介绍: UML(Unified Modeling Language)组件图是软件系统设计中的重要工具,用于描绘系统的物理结构和组件之间的关系。在软件工程中,通过创建清晰的组件图,团队能够更好地理解系统的模块化结构和组织关系&a…...
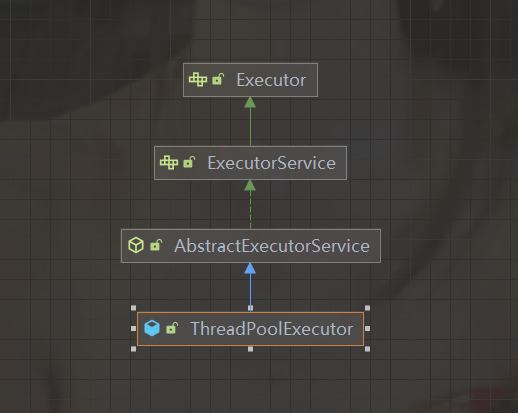
深入浅出ThreadPoolExecutor(一)
文章目录 线程池简诉ThreadPoolExecutor详解ThreadPoolExecutor参数详解创建线程池的工具类Executors 线程池简诉 针对各种池子,比如 连接池:用于管理和重复使用数据库连接,避免频繁创建和销毁数据库连接带来的性能开销。对象池:用于管理和重复使用对象…...

网站的常见攻击与防护方法
在互联网时代,几乎每个网站都存在着潜在的安全威胁。这些威胁可能来自人为失误,也可能源自网络犯罪团伙所发起的复杂攻击。无论攻击的本质如何,网络攻击者的主要动机通常是谋求经济利益。这意味着无论您经营的是电子商务项目还是小型商业网站…...
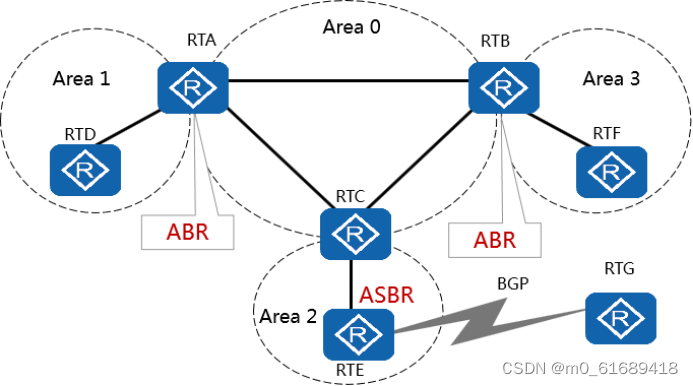
网络工程师知识点3
41、各个路由协议,在华为设备中的优先级? 直连路由 0 OSPF 10 静态 60 42、OSPF:开放式最短路径优先路由协议,使用SPF算法发现和计算路由 OSPF的优点: 1、收敛速度快,无路由自环,适用于大型网络…...
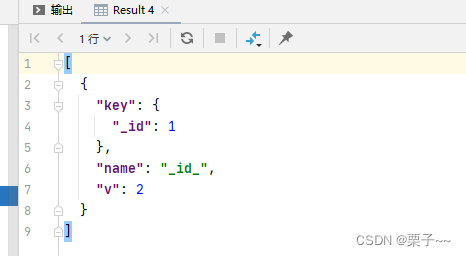
mongoDB 性能优化
文章目录 前言mongoDB 性能优化1. explain方法来查看查询的执行计划2. 查看mongoDB 集合的索引3. mongoDB 怎么添加索引4. 升序索引与降序索引是什么意思 前言 如果您觉得有用的话,记得给博主点个赞,评论,收藏一键三连啊,写作不易…...

10月13日,每日信息差
今天是2023年10月13日,以下是为您准备的13条信息差 第一、欧盟投资4.5亿欧元在法国建设电池超级工厂。欧洲投资银行是欧盟的贷款机构,也是世界上最大的跨国银行之一 第二、北京银行推出数字人民币智能合约平台 数字人民币预付资金管理产品在商超场景…...

Spring Boot 中的 Redis 数据操作配置和使用
Spring Boot 中的 Redis 数据操作配置和使用 Redis(Remote Dictionary Server)是一种高性能的开源内存数据库,用于缓存、消息队列、会话管理和数据存储。在Spring Boot应用程序中,Redis被广泛用于各种用例,包括缓存、…...

rust宏
宏看起来和函数很像,只不过名称末尾有一个感叹号 ! 。 宏并不产生函数调用,而是展开成源码,并和程序的其余部分一起被编译。 Rust宏和C不同,Rust的宏会展开为抽象语法树(AST,abstract syntax treeÿ…...
性能测试之性能测试指标详解
前言 刚开始,以为做性能测试,就是做些脚本、参数化、关联,压起来之后,再扔出一个结果。 但实际上不止这些内容,还要加上性能分析,关注调优之后响应时间有多大的提升,TPS 有多大的提高…...

CustomNavBar 自定义导航栏视图
1. 创建偏好设置键 CustomNavBarTitlePreferenceKey.swift import Foundation import SwiftUI//State private var showBackButton: Bool true //State private var title: String "Title" //"" //State private var subtitle: String? "SubTitl…...

5分钟免费制作专业AI翻唱:AICoverGen完整指南
5分钟免费制作专业AI翻唱:AICoverGen完整指南 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想让AI帮你翻唱…...

Swagger2Word终极指南:3种方法实现API文档自动化转换
Swagger2Word终极指南:3种方法实现API文档自动化转换 【免费下载链接】swagger2word 项目地址: https://gitcode.com/gh_mirrors/swa/swagger2word 还在为手动编写API文档而烦恼吗?Swagger2Word为你提供了一站式自动化解决方案,将Swa…...

如何5分钟掌握N_m3u8DL-RE:流媒体下载终极解决方案
如何5分钟掌握N_m3u8DL-RE:流媒体下载终极解决方案 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/nm3/N_m3u8DL-RE …...
,现在必须掌握的3种替代渲染方案)
像素艺术家紧急预警:Midjourney即将关闭--tile参数兼容性(倒计时14天),现在必须掌握的3种替代渲染方案
更多请点击: https://intelliparadigm.com 第一章:像素艺术家紧急预警:Midjourney即将关闭--tile参数兼容性(倒计时14天) Midjourney v6.5 已正式宣布将于 14 天后终止对 --tile 参数的原生支持,此举将直…...

3步强力清理:Pearcleaner让你轻松解决Mac应用残留文件问题
3步强力清理:Pearcleaner让你轻松解决Mac应用残留文件问题 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾删除Mac应用后,发…...
)
ElevenLabs葡语语音私密训练技巧(仅限白名单客户使用的SSML扩展语法+方言权重微调指令集)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs葡语语音私密训练的核心价值与白名单准入机制 ElevenLabs 的葡语语音私密训练(Private Voice Fine-tuning for Portuguese)专为高合规性场景设计,面向金融…...

Git Worktree CLI工具:告别分支切换焦虑,实现高效并行开发
1. 项目概述与核心价值如果你和我一样,长期在多个Git分支间穿梭,同时维护着几个不同的功能特性或修复补丁,那你一定对那种在分支间反复切换、代码状态混乱、甚至不小心提交到错误分支的“切分支焦虑症”深有体会。传统的git checkout或git sw…...

基于树莓派与电子墨水屏的慢速电影播放器制作全攻略
1. 项目概述:当电影遇见电子墨水如果你和我一样,对电子墨水(eInk)屏幕那种独特的、像印刷品一样的显示效果着迷,同时又是个喜欢折腾树莓派(Raspberry Pi)的玩家,那么这个项目绝对能让…...

基于ChatGPT与飞书开放平台构建企业级智能聊天机器人实践指南
1. 项目概述:当ChatGPT遇上飞书,打造你的专属智能工作伙伴 最近在折腾一个挺有意思的项目,叫“chatgpt-for-chatbot-feishu”。简单来说,这就是一个桥梁,一个能让OpenAI的ChatGPT模型,直接接入到飞书&…...

解锁专业阅读体验:Chrome本地Markdown文件智能渲染解决方案
解锁专业阅读体验:Chrome本地Markdown文件智能渲染解决方案 【免费下载链接】markdownReader markdownReader is a extention for chrome, used for reading markdown file. 项目地址: https://gitcode.com/gh_mirrors/ma/markdownReader 你是否曾经在Chrome…...